План лекции:
1.Принцип действия радиолокатора..
2. Обнаружение целей и измерение дальности.
1.Принцип действия радиолокатора.
РАДИОНАВИГАЦИОННЫЕ ПРИБОРЫ
К радионавигационным приборам относятся радиолокационные станции, радиопеленгаторы, а также приемоиндикаторы радионавигационных систем.
Радиолокационные станции (РЛС) предназначены для обнаружения местонахождения различных объектов и наблюдения за окружающей надводной обстановкой в условиях плохой видимости.
В РЛС используется явление отражения радиоволн от различных объектов, расположенных на пути их распространения, таким образом, в радиолокации используется явление эха. РЛС содержит передатчик, приемник, антенно-волноводное устройство, индикатор с экраном для визуального наблюдения эхо-сигналов.
Принцип работы РЛС следующий. Передатчик станции вырабатывает мощные высокочастотные импульсы электромагнитной энергии, которые с помощью антенны посылаются в пространство узким лучом. Отраженные от какого-либо объекта (судна, высокого берега и т. п.) радиоимпульсы возвращаются в виде эхо-сигналов к антенне и поступают в приемник. По направлению узкого радиолокационного луча, который в данный момент отразился от объекта, можно определить пеленг или курсовой угол объекта. Измерив, промежуток времени между посылкой импульса и приемом отраженного сигнала, можно получить расстояние до объекта. Так как при работе РЛС антенна вращается, излучаемые импульсные колебания охватывают весь горизонт. Поэтому на экране индикатора судовой РЛС создается изображение окружающей судно обстановки. Принятые эхо-сигналы после преобразования и усиления в приемнике поступают в индикатор, снабженный электроннолучевой трубкой. Экран электроннолучевой трубки покрыт особым составом, обладающим свойством послесвечения, поэтому эхо-сигналы, возникающие на экране индикатора, угасают постепенно. Центральная светящаяся точка на экране индикатора РЛС отмечает место судна, а идущая от этой точки светящаяся линия показывает курс судна.
 Изображение различных объектов на экране индикатора может быть ориентировано относительно диаметральной плоскости судна (стабилизация по курсу) или относительно истинного меридиана (стабилизация по норду). Направления на объекты определяются по азимутальному кругу соответственно ориентированного или по курсу, или по норду. В последнем случае азимутальный круг должен быть связан с репитером гирокомпаса. По светящимся на экране индикатора градуированным неподвижным кольцам дальности определяется расстояние до нужного объекта, который изображается светящимся пятном, если это одиночный предмет (судно, маяк), или волнистой линией (береговая черта и т. д.). Для точного измерения расстояния имеется дальномерное устройство с подвижным кругом дальности.
Изображение различных объектов на экране индикатора может быть ориентировано относительно диаметральной плоскости судна (стабилизация по курсу) или относительно истинного меридиана (стабилизация по норду). Направления на объекты определяются по азимутальному кругу соответственно ориентированного или по курсу, или по норду. В последнем случае азимутальный круг должен быть связан с репитером гирокомпаса. По светящимся на экране индикатора градуированным неподвижным кольцам дальности определяется расстояние до нужного объекта, который изображается светящимся пятном, если это одиночный предмет (судно, маяк), или волнистой линией (береговая черта и т. д.). Для точного измерения расстояния имеется дальномерное устройство с подвижным кругом дальности.
«Дальность видимости» РЛС достигает несколько десятков миль. Однако дальность обнаружения зависит от отражательной способности объектов. На дальность обнаружения РЛС, кроме технических данных станции, влияют гидрометеорологические факторы.
Судовые РЛС позволяют осуществлять плавание в узкостях, расхождение судов и определение места судна по береговым ориентирам или радиолокационным маякам в условиях плохой видимости.
Судовые РЛС позволяют за короткий промежуток времени определить курс и скорость встречного судна и избежать, таким образом, столкновения.
Однако РЛС имеет ряд недостатков: ограниченная дальность действия; значительная «мертвая зона», т. е. минимальная дальность обнаружения, которая составляет от 30 до 120 м по расстоянию и 1,8—1,1° по азимуту; сложность устройства РЛС затрудняет ремонт в судовых условиях.
Любой радиолокатор имеет три основных элемента – антенну, приемопередатчик и дисплей (рис. 1). В современных судовых радарах два первых элемента, как правило, объединяются в отдельный модуль, обычно называемый сканером (от слова «сканировать» – просматривать, искать).
При работе вращающаяся в горизонтальной плоскости антенна радара (рис. 2) излучает вырабатываемые передатчиком короткие высокочастотные импульсы (т. н. «зондирующие импульсы») и принимает отраженные от различных объектов сигналы. Приемник выделяет отраженные сигналы из шумов и передает их на дисплей, в котором осуществляется их усиление, выделение из различных помех (шумов) и отображение окружающего пространства на экране индикатора кругового обзора. Наблюдая на экране радиолокационную обстановку вокруг судна, оператор производит визуальное обнаружение целей (под целью в радиолокации понимается любой обнаруженный радаром объект), измерение их дальности и азимута относительно судна и управление работой радара.
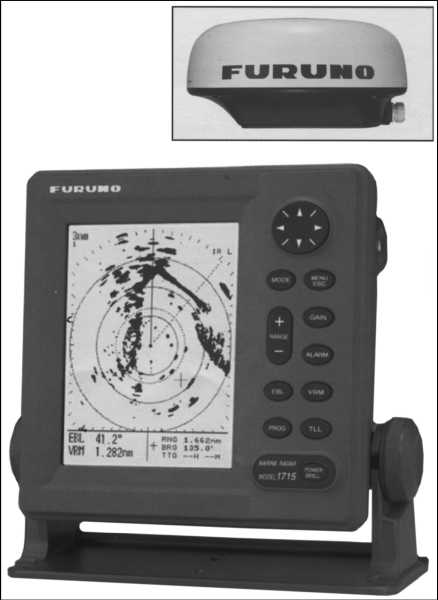
Рис. 1. Состав судового радиолокатора
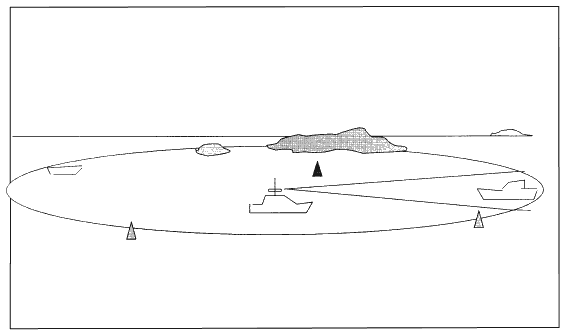
Рис. 2. Принцип действия судового радиолокатора
2. Обнаружение целей и измерение дальности.
Дальность действия радара, указываемая в его паспортных данных – это его важнейший, но далеко не однозначный показатель, и в реальных условиях дальность обнаружения различных целей не всегда будет совпадать с заявленной.
Дальность обнаружения зависит от многих факторов – отражательной способности цели (характеризуемой т. н. ЭПР – эффективной поверхностью рассеяния), ее контрастностью по отношению к фону, высотой антенны и цели, состоянием атмосферы и моря.
Береговой черты:
- при высоте берега до 60 м на расстоянии до 20 морских миль;
- при высоте берега до 6 м на расстоянии до 7 морских миль.
Надводных объектов:
- судов валовой вместимостью 5000 т на расстоянии 7 морских миль независимо от ракурса;
- небольшого судна длиной 10 м на расстоянии 3 морских мили;
- объектов, аналогичных навигационному бую, имеющих ЭПР приблизительно 10 кв. м, на расстоянии 2 морских мили.
Обнаружение целей
Обнаружение любых объектов осуществляется визуально на экране локатора. Небольшие объекты – суда, буи, островки – отображаются в виде ярких точек на фоне различных помех – от собственных шумов приемника, отражений от волн и атмосферных осадков, маскирующих отметки от целей. Поэтому, обнаружение целей является процессом выделения их отметок из помех.
Для выделения отметок от целей на фоне помех в судовых радарах предусмотрены различные функции – регулировка усиления приемника, подавление отражений от волн и дождя, расширение отметки (введение т. н. «следа эхо») и ряд других ухищрений, определяющих возможности радара быстро и надежно обнаруживать цели.
Определение координат целей Как уже отмечалось выше, судовой радиолокатор определяет две координаты в своей местной системе – дальность относительно судна и азимут относительно диаметральной плоскости судна или направления на север.
Измерение дальности
Дальность до цели может осуществляться тремя способами – с помощью колец дальности, с помощью курсора и с помощью маркера переменного расстояния VRM.
Если посмотреть на экран радара, первое, что бросается в глаза – это находящиеся на нем концентрические кольца (рис. 3). Количество колец и расстояния между ними жестко связаны с используемыми шкалами дальности. Если, например, используется шкала дальности 16 миль, а на экране 8 колец, то понятно, что интервал между кольцами составляет 2 мили. Для измерения расстояния до цели достаточно подсчитать количество колец между ее отметкой и центром экрана, умножить это число на расстояние между кольцами и прибавить оцененное на глаз приблизительное расстояние отметки от внутренней кромки ближайшего по направлению к центру кольца. Понятно, что такой способ дает наглядную и быструю, но весьма грубую оценку, поэтому для получения точных значений используют два других способа.
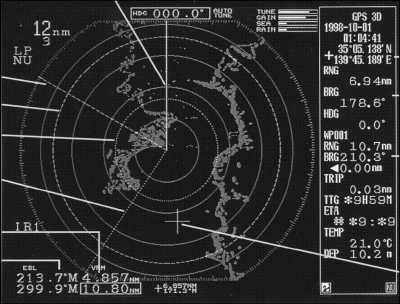
Рис. 3. Измерение дальности на экране радара
Для точных измерений может быть использован курсор и подвижный маркер расстояний VRM. Курсор – это отметка на экране в виде перекрестия, управляемая с помощью клавиш или трэкбола. Чтобы измерить дальность до цели, достаточно поместить перекрестие на внутреннюю кромку отметки, после чего искомое значение дальности вместе со значением азимута высветится в специальном окне в углу экрана.
Маркер расстояний – это кольцо на экране, радиус которого может выбираться оператором. Изменяя величину радиуса, Оператор совмещает кольцо с внутренней границей отметки цели – и вы получите значение расстояния до цели, высвеченное в углу экрана.
Измерение направления
Направление отсчитывается от курсовой линии – вертикальной линии на экране, совпадающей с диаметральной плоскостью судна. При наличии сопряженных с радаром магнитного компаса или гирокомпаса, отсчет азимута может осуществляться от магнитного или истинного направления на Север.
Контрольные вопросы:
1. . Дать определение судовым радионавигационным приборам.
2. Охарактеризовать принцип действия радиолокатора.
3. Охарактеризовать основные характеристики РЛС.
4. Пояснить принцип обнаружения целей на экране РЛС.
5.Пояснить принцип измерения расстояния при помощи РЛС.
6.Пояснить основные недостатки при работе с судовым радиолокатором.
Дата: 2018-11-18, просмотров: 1068.