Значение  при
при  характеризует установившееся состояние системы. Отклонение
характеризует установившееся состояние системы. Отклонение  от значения y, соответствующего значению
от значения y, соответствующего значению  , т. е.
, т. е.  представляет собой статическую погрешность системы. Отклонение
представляет собой статическую погрешность системы. Отклонение  - , являющееся функцией времени, определяет динамическую погрешность системы. Максимальная динамическая погрешность за время
- , являющееся функцией времени, определяет динамическую погрешность системы. Максимальная динамическая погрешность за время  равно значению максимального перерегулирования.
равно значению максимального перерегулирования.
Качество отработки типовых сигналов x и f порознь оценивают либо непосредственно по управляемой переменной системы y, либо по ошибке системы  , представляющей собой разность между выходом исследуемой системы и выходом некоторой эталонной линейной системы
, представляющей собой разность между выходом исследуемой системы и выходом некоторой эталонной линейной системы 
 (1.4)
(1.4)
Согласно этому выражению изображение ошибки запишется как
 (1.5)
(1.5)
Эталонная передаточная функция должна соответствовать заданному линейному динамическому преобразованию входного сигнала  замкнутой системы. Так, для системы автоматического регулирования в идеальном случае y должно быть равно x, следовательно
замкнутой системы. Так, для системы автоматического регулирования в идеальном случае y должно быть равно x, следовательно  ; в системе копирования с изменением масштаба
; в системе копирования с изменением масштаба  , откуда
, откуда  ; в интеграторе требуется, чтобы
; в интеграторе требуется, чтобы

и, следовательно,
Если при исследованиях качества системы автоматического регулирования в качестве эталона принята  и
и  , то
, то
 ,
,
т.е. ошибка системы равна ее рассогласованию ε(t).
Итак, точность системы автоматического регулирования при отработке ступенчатого сигнала  оценивается статической ошибкой системы
оценивается статической ошибкой системы  .
.
Согласно формуле (1.5) ошибка системы по управляющему воздействию
и по теореме о предельном значении статическая ошибка системы
 (1.6)
(1.6)
Очевидно,  при условии, что в (1.6)
при условии, что в (1.6)
 (1.7)
(1.7)
Системы, обладающие этим свойством, называются астатическими по управляющему воздействию.
Другими словами, астатические САУ – это системы, в которых при внешнем воздействии f и окончании переходного процесса значение регулируемой величины устанавливается равным заданному. В таких системах разность между заданным и текущим значениями регулируемой величины в установившемся режиме равна нулю  .
.
Достаточными признаками астатических систем являются следующие признаки:
- значение регулируемой величины равно заданному значению независимо от внешнего воздействия;
- определенному значению регулируемой величины соответствует несколько положений регулирующего органа;
- между чувствительным элементом и ОУ находится одно или несколько астатических звеньев, где под астатическим звеном понимают такое звено, в котором выходная величина в установившемся режиме находится в неустойчивом положении равновесия. При внешнем воздействии выходная величина астатического звена выходит из неустойчивого равновесия и изменяется по строго определенному функциональному закону. Характеристика такого звена имеет астатизм нулевого порядка.
В принципе астатические системы могут быть 1-го, 2-го и более высоких порядков астатизма. Порядок астатизма САР совпадает со степенью оператора «  », стоящего сомножителем в знаменателе передаточной функции разомкнутой системы
», стоящего сомножителем в знаменателе передаточной функции разомкнутой системы  . Например, передаточная функция
. Например, передаточная функция  показывает, что порядок астатизма САР - второй.
показывает, что порядок астатизма САР - второй.
Если же  , то систему называют статической, имея при этом в виду, что согласно (1.6) установившееся значение ее выхода после отработки постоянного управляющего сигнала отличается от требуемого (эталонного) значения тем больше, чем больше уровень входного сигнала.
, то систему называют статической, имея при этом в виду, что согласно (1.6) установившееся значение ее выхода после отработки постоянного управляющего сигнала отличается от требуемого (эталонного) значения тем больше, чем больше уровень входного сигнала.
Другими словами, статические системы – это системы, в которых при возмущающем воздействии регулируемая величина по окончании переходного процесса принимает значения, пропорциональные возмущающему воздействию. Следовательно, статические САУ характеризуются зависимостью выходной величины от внешнего возмущающего воздействия. Статическую характеристику САУ оценивают коэффициентом неравномерности, или статизмом, определяемым по формуле
Достаточным признаком для отнесения систем к классу статических систем являются следующие:
- определенному значению внешнего воздействия соответствует одно определенное значение регулируемой величины;
- регулирующий орган занимает строго соответствующее положение по отношению к регулируемой величине;
- между чувствительным элементом и ОУ в САУ включены статические звенья, т. е. звенья, в которых между выходной и входной величинами существует строго определенная функциональная связь. Графическое отображение этой связи представляет собой статическую характеристику звена 
В системах автоматического регулирования, для которых выполняется условие 

где k – коэффициент усиления разомкнутой системы.
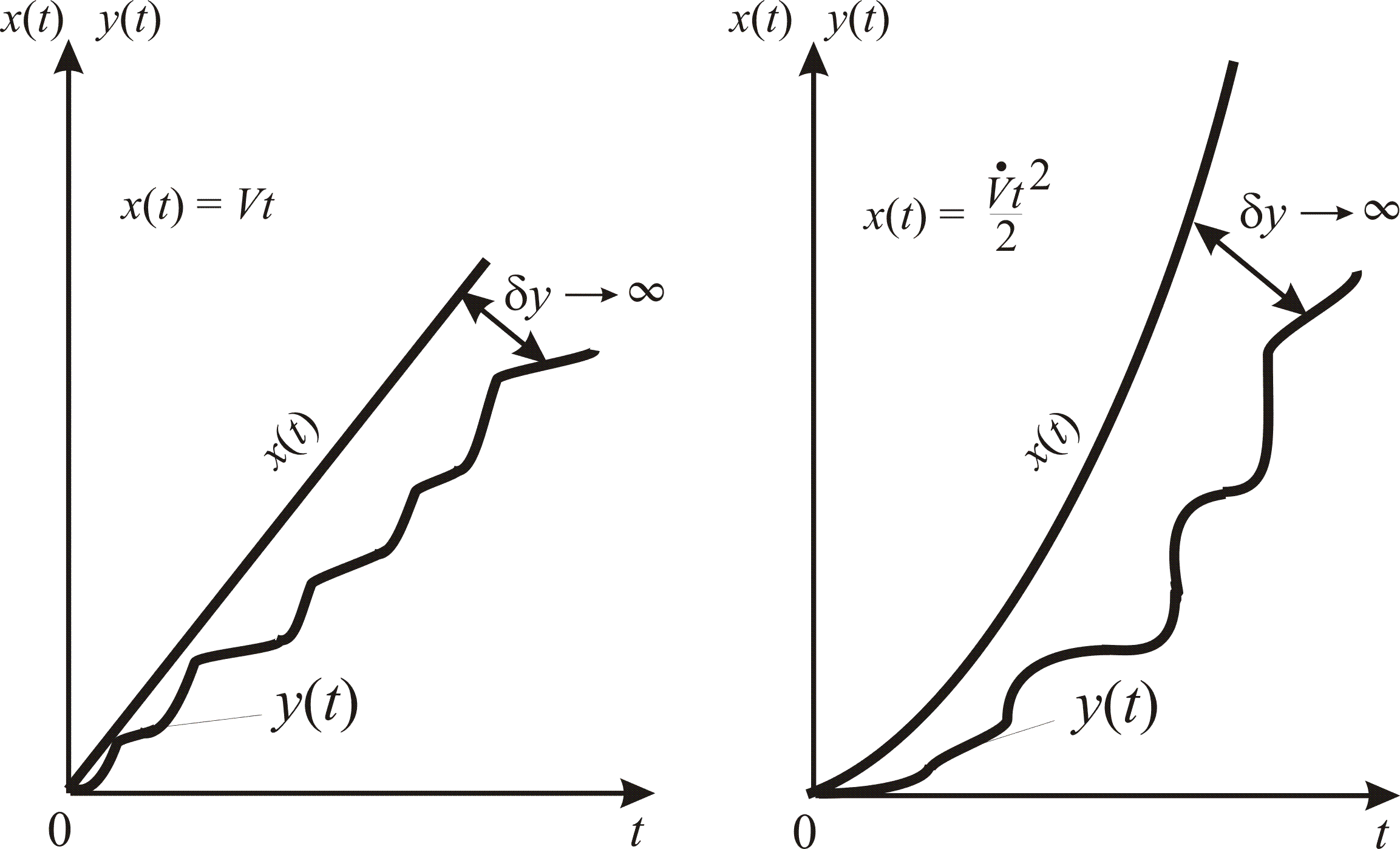
| Рис. 1.17. График возрастания погрешности САР при линейном увеличении входной величины | Рис. 1.18. График возрастания погрешности САР при квадратическом увеличении входной величины |
Погрешность  уменьшается с увеличением коэффициента
уменьшается с увеличением коэффициента  . В случаях линейного и квадратического воздействия погрешность
. В случаях линейного и квадратического воздействия погрешность  непрерывно возрастает. Поэтому статические системы нельзя применять в качестве следящих систем (рис. 1.17, 1.18).
непрерывно возрастает. Поэтому статические системы нельзя применять в качестве следящих систем (рис. 1.17, 1.18).
Контрольные вопросы
1. Какие основные режимы работы САР?
2. Какими характеристиками может быть описан переходный режим САР?
3. Назовите основные показатели качества переходного процесса САР.
4. Какие основные типовые внешние воздействия на САР?
5. Как определяют время окончания переходного процесса в САР?
6. Какие типы переходных процессов Вы знаете? Приведите графики.
7. Какие показатели применяются для оценки точности регулирования САР?
8. Что такое «статическая» и «астатическая» САР?
Р а з д е л 2. ЭЛЕМЕНТЫ СИСТЕМ АВТОМАТИКИ
Дата: 2018-12-21, просмотров: 485.