2.3.1 . Физические основы работы электромеханических элементов автоматики
В основу работы электромеханических элементов автоматики положен принцип использования электромагнитной индукции и момента сил, действующих на токопроводящий контур в магнитном поле.
Электродвигатели и тахогенераторы
Синхронные двигатели
Синхронные двигатели в МСН применяются для приведения механизмов навигационных приборов в движение с постоянной скоростью.
Синхронный двигатель (рис. 2.9) состоит из статора, ротора, магнитопровода с намотанной на него обмоткой возбуждения и редуктора (не показан).
Магнитопровод имеет два явно выраженных расщепленных полюса с короткозамкнутым витком W на каждом из полюсов. Ротор двигателя расположен между полюсами внутри корпуса статора. Ротор изготовлен из вольфрамовой стали, закалён и обладает свойствами постоянного магнита.
При включении обмотки возбуждения двигателя в сеть переменного тока в магнитопроводе возникает магнитный поток Ф0, который в точках Вn и Сm разветвляется на потоки Ф1 и Ф2. В половинах полюсов Вn и С´m, а также в половинах В´m и Сn эти потоки равны. Но в половинах Вn и Вm, а также в половинах Сn и С´m эти потоки различаются как по величине, так и по фазе, что обусловлено наличием короткозамкнутых витков W1 и W2.
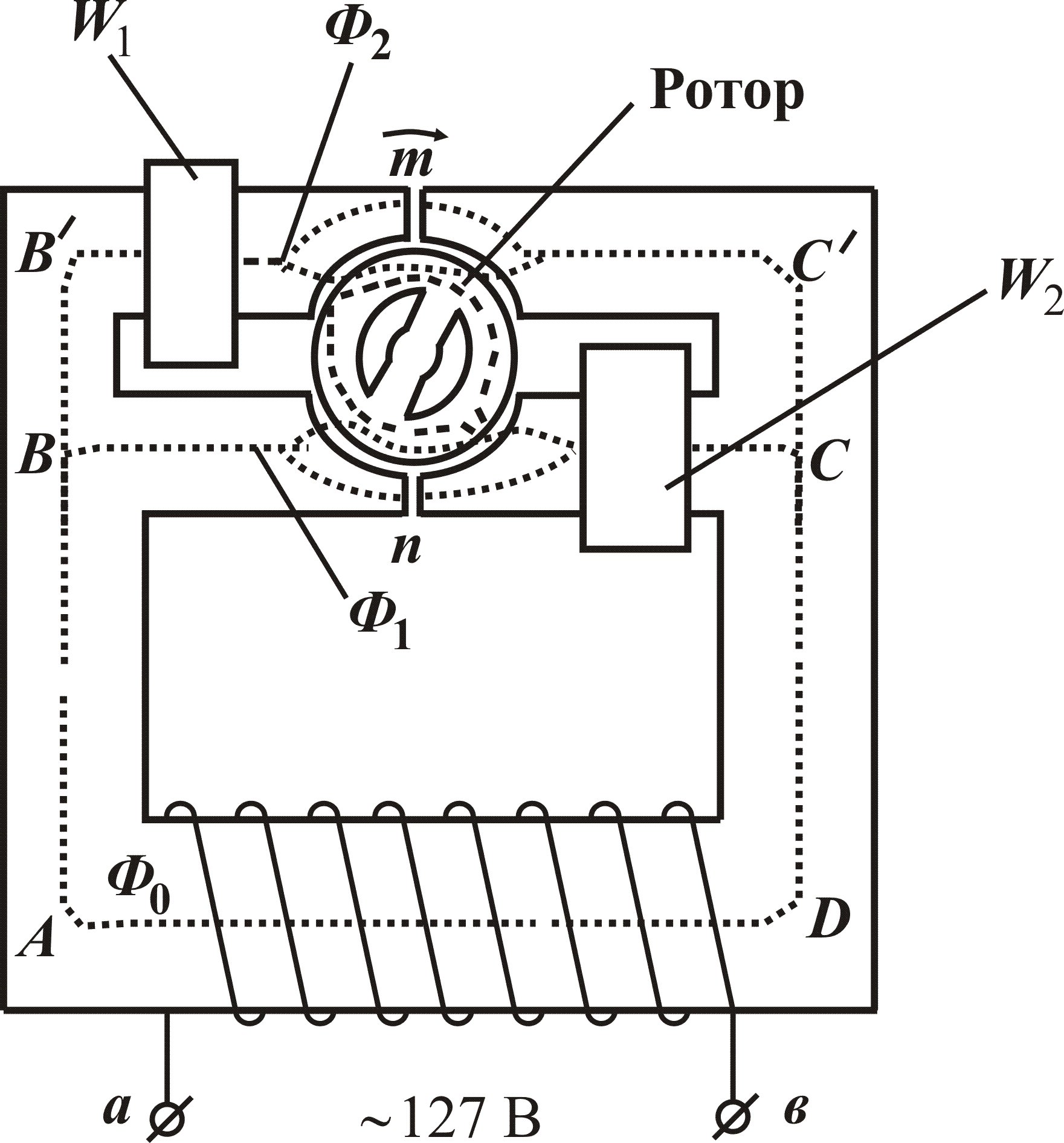
Рис. 2.9. Магнитная система синхронного электродвигателя
Потоки Ф1 и Ф2, образуя вращающееся магнитное поле, которое пронизывает тело ротора, индуктируют в нем вихревые токи. Эти токи, взаимодействуя с потоками Ф1 и Ф2, создают момент, приводящий ротор двигателя во вращение. Частота вращения ротора синхронного двигателя (скорость вращения двигателя) прямо пропорциональна частоте напряжения возбуждения.
Примером синхронного двигателя является двигатель СД-2, используемый в НК «Сигма».
Асинхронные двигатели
Если у синхронных двигателей существует прямая зависимость скорости вращения от частоты питания, то у асинхронных двигателей такой зависимости нет.
Конструктивное устройство двигателя показано на рис. 2.10. Магнитная система двигателя состоит из неподвижного статора 1 и сердечника 2, между которыми в воздушном зазоре помещен тонкостенный полый алюминиевый ротор 3 в виде стакана, вращающегося на валу 4. Неподвижный сердечник предназначен для лучшего распределения магнитного потока в воздушном зазоре.
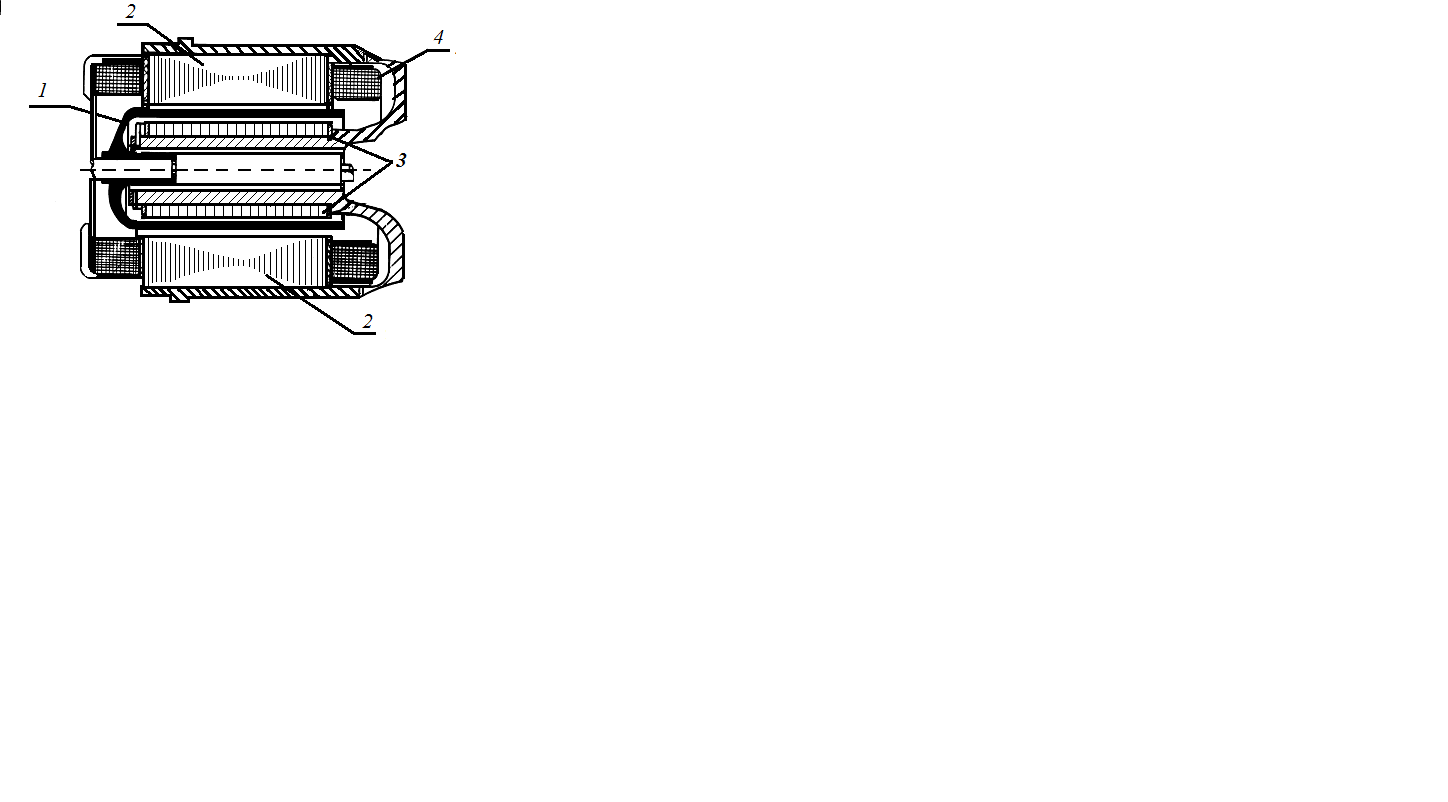
Рис.2.10. Конструкция двигателя АДП
В пазы статора уложены две обмотки: возбуждения и управления. Обмотки изолированы друг от друга и смещены в пространстве на 90°.0бмотка возбуждения присоединяется к сети с неизменным по амплитуде напряжением, а обмотка управления - к управляющему устройству (усилителю) с переменным по амплитуде напряжением сигнала, смещенного по фазе относительно напряжения возбуждения на 90°.
Магнитные потоки обмоток возбуждения и управления, сдвинутые на 90° в пространстве и по времени (фазе), образуют вращающееся магнитное поле. Мгновенное значение потока обмотки возбуждения можно записать в виде
 (2.4)
(2.4)
а обмотки управления в виде
 . (2.5)
. (2.5)
Величина мгновенного результирующего потока, действующего в воздушном зазоре АДП, будет
 (2.6)
(2.6)
Положение вектора ФР в пространстве охарактеризуется углом a (рис.2.11), который определяется по формуле:
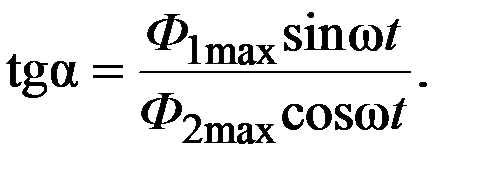 (2.7)
(2.7)
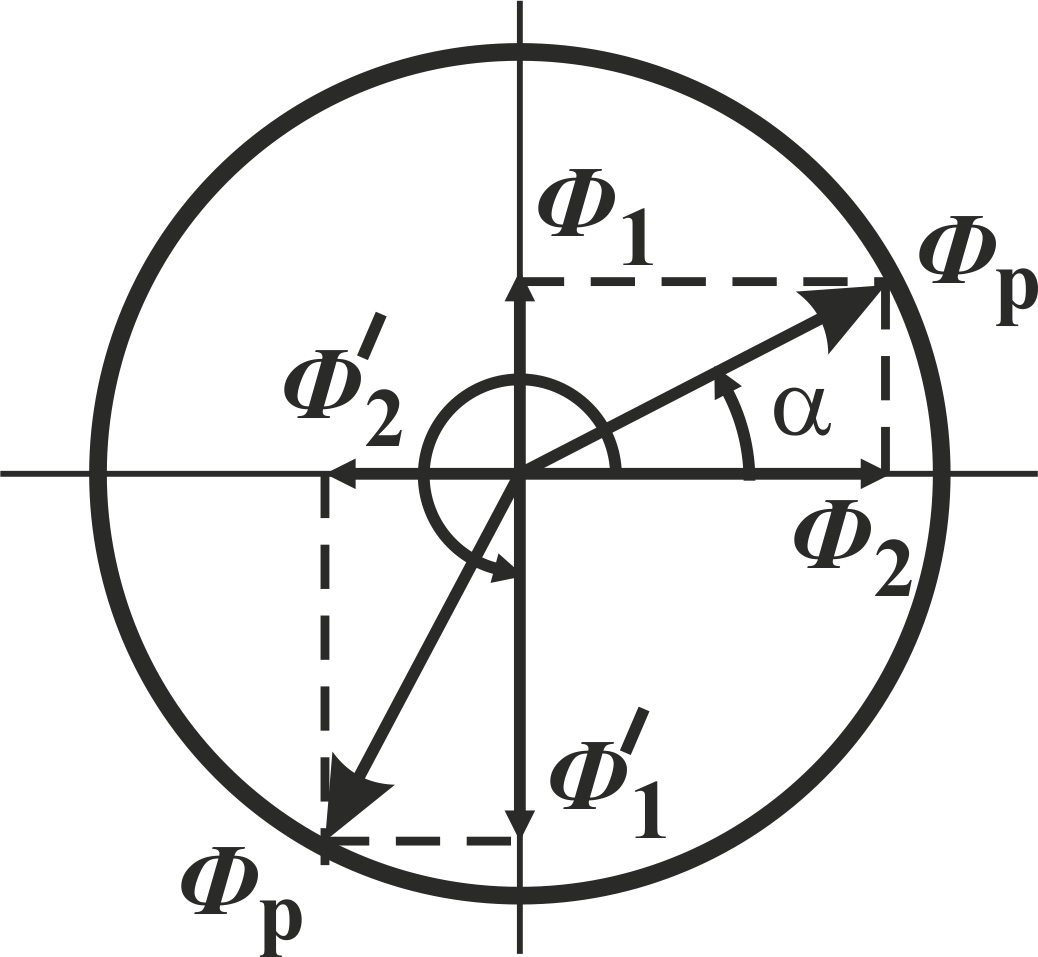
Рис. 2.11. Векторная диаграмма вращающегося магнитного поля
При условии, что  формулы (2.6) и (2.7) примут вид
формулы (2.6) и (2.7) примут вид
 , (2.8)
, (2.8)
откуда
 , (2.9)
, (2.9)
 . (2.10)
. (2.10)
Выражения (2.8) и (2.9) показывают, что вектор результирующего потока постоянен по величине и вращается с угловой скоростью w.
Таким образом, при действии двух равных потоков, сдвинутых в пространстве и по времени на 90°, в воздушном зазоре машины образуется круговое вращающееся магнитное поле. Вращающееся магнитное поле, пересекая ротор, наводит в нем токи. Эти токи, взаимодействуя с магнитным полем, создают вращающий момент, под действием которого ротор приходит в движение по направлению вращения поля.
Скорость вращения ротора при неизменном напряжении цепи возбуждения и постоянном моменте нагрузки на валу регулируется изменением величины напряжения в обмотке управления. Для изменения направления вращения двигателя изменяют фазу на 180° в обмотке управления. При отсутствии напряжения на обмотке управления вращающий момент равен нулю.
Для создания сдвига фазы управляющего напряжения  относительно напряжения возбуждения
относительно напряжения возбуждения  на 90° в обмотку возбуждения или в обмотку управления включают емкость. Схемы включения емкости в обмотки АДП следящих систем показаны на рис. 2.12.
на 90° в обмотку возбуждения или в обмотку управления включают емкость. Схемы включения емкости в обмотки АДП следящих систем показаны на рис. 2.12.
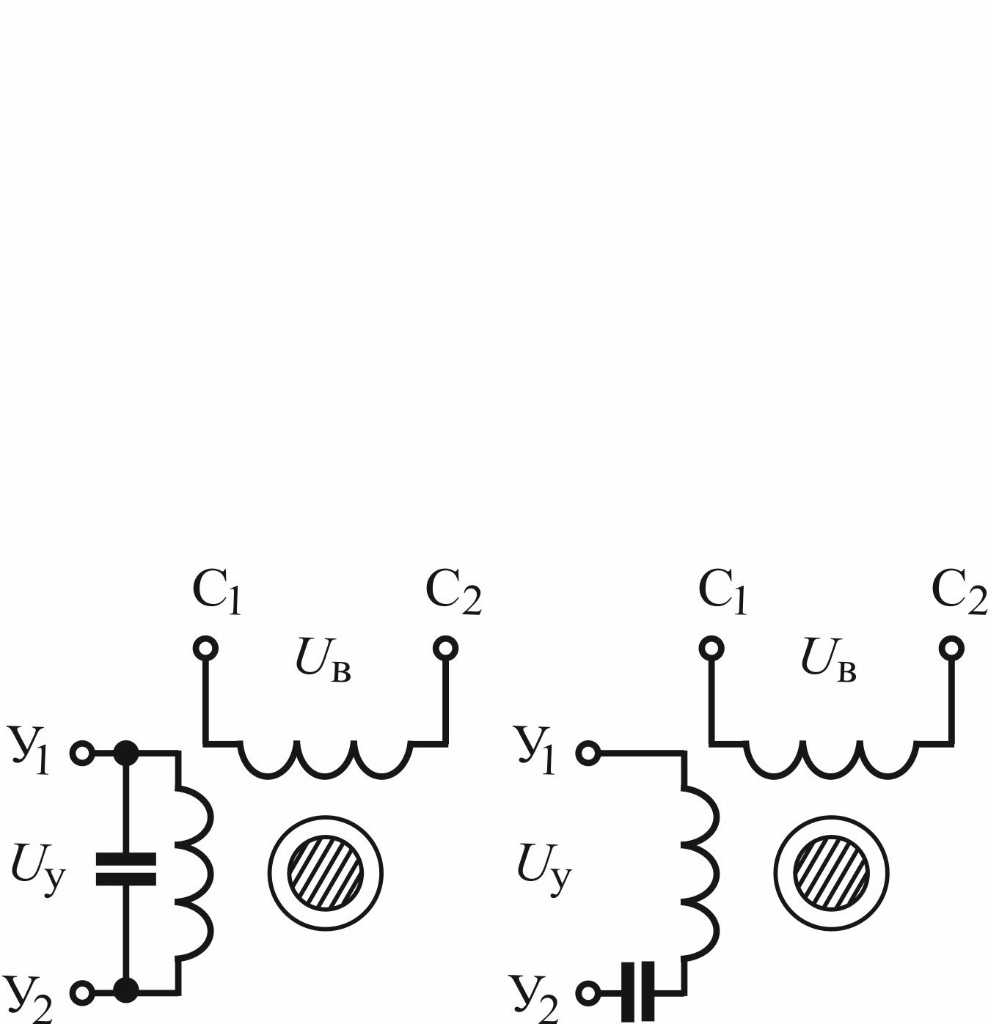
Рис.2.12. Включение емкости в обмотку управления АДП
Двигатели АДП отличаются надежностью при эксплуатации, так как у них нет коллектора, они имеют малую инерционность и позволяют перераспределять мощность между обмотками возбуждения и управления. Благодаря последнему свойству, в следящих системах с двигателями АДП можно использовать маломощные усилители.
Управление скоростью его вращения осуществляется путем изменения напряжения управления при сохранении на его валу момента нагрузки. Поэтому асинхронные двигатели предназначены для работы в следящих системах и в схемах автоматизации в качестве управляемых малоинерционных реверсивных двигателей.
У некоторых типов асинхронных двигателей обмотка управления разделена на две части, которые, в зависимости от характера использования конкретной схемы, могут быть соединены последовательно или параллельно.
Электрическая схема асинхронного двигателя с полым ротором представлена на рис. 2.13. На этой схеме обозначение обмоток приведено по функциональному принципу. Маркировка концов обмоток на клеммных колодках двигателей разных типов могут различаться. Например:
в АДП-1: Г1, Г2 – концы обмотки возбуждения, а В1, В2- концы обмотки управления;
в ДИД-1: обмотка возбуждения выводится на клеммы 1-3, а концы обмоток управления – на клеммы 2-5 и 4-6;
в АДП-308: обмотка возбуждения маркированы как В1-В2, а обмотки управления – как У1-У4 и У2-У3.
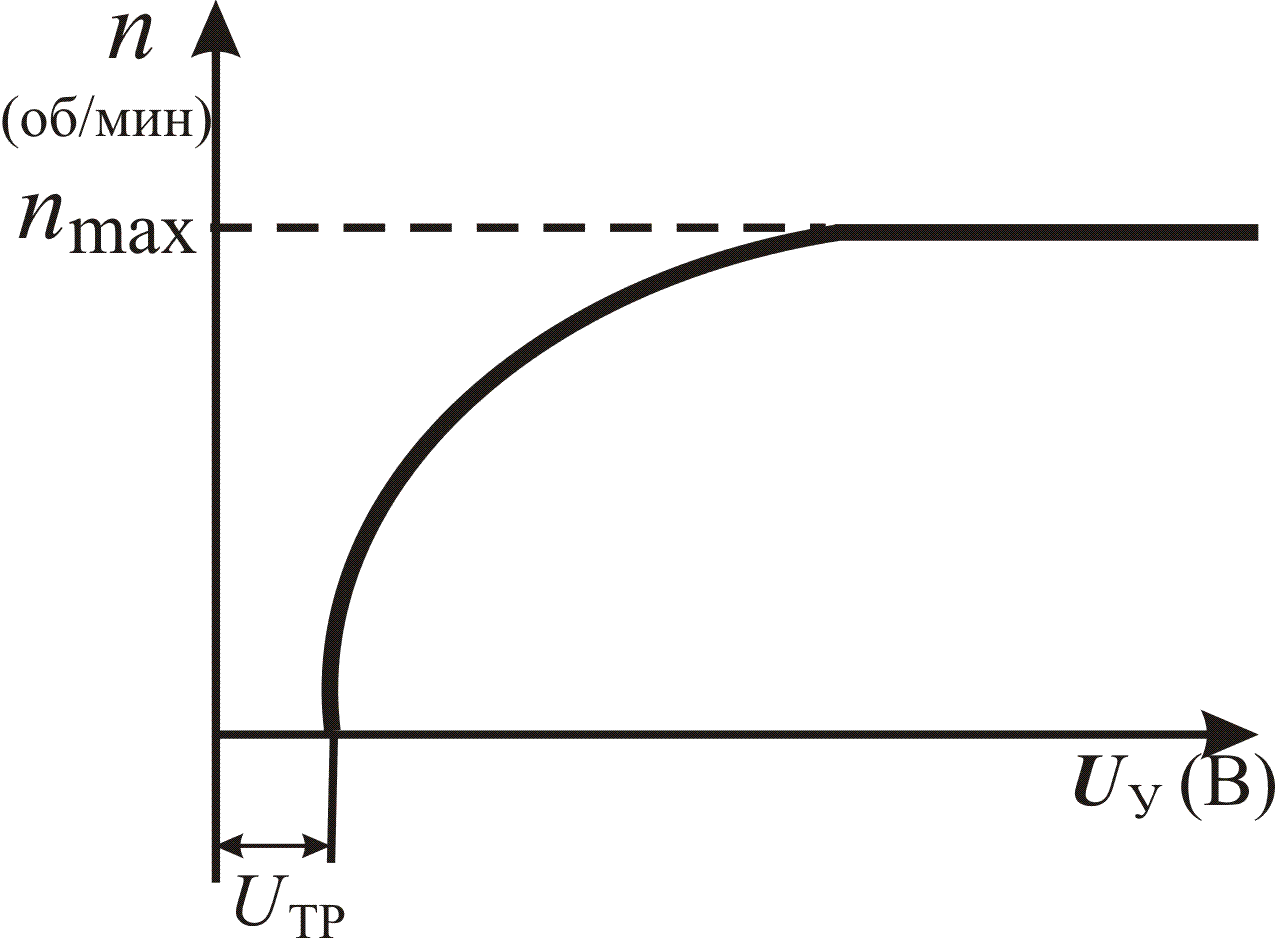
Регулировочная характеристика АДП, т. е. зависимость частоты вращения  ротора от амплитуды напряжения управления
ротора от амплитуды напряжения управления  показана на рис. 2.14. Анализ регулировочной характеристики показывает, что частота вращения характеризуется нелинейной зависимостью от напряжения управления. Чувствительность АДП характеризуется напряжением трогания
показана на рис. 2.14. Анализ регулировочной характеристики показывает, что частота вращения характеризуется нелинейной зависимостью от напряжения управления. Чувствительность АДП характеризуется напряжением трогания  , т. e. минимальным напряжением управления, при котором ротор начинает вращаться.
, т. e. минимальным напряжением управления, при котором ротор начинает вращаться.
Для лучшего уяснения принципа формирования вращающего поля в АДП рассмотрим этот процесс более подробно.
На рис. 2.15 показан график изменения тока в горизонтальной  и
и
вертикальной  обмотках статора.
обмотках статора.
В момент времени  ток в горизонтальной обмотке
ток в горизонтальной обмотке  , имеет положительное направление, создает магнитный поток, направленный вдоль магнитной оси вверх.
, имеет положительное направление, создает магнитный поток, направленный вдоль магнитной оси вверх.
Ток 
 .
.
В момент времени  ток
ток  , ток
, ток  , имеет положительное направление, создает магнитный поток, направленный вдоль магнитной оси вертикальной обмотки вправо.
, имеет положительное направление, создает магнитный поток, направленный вдоль магнитной оси вертикальной обмотки вправо.
| Рис. 2.13. Электрическая схема АД | Рис. 2.14. Выходная характеристика АДП |
В момент времени  ток имеет обратное направление, создает магнитный поток
ток имеет обратное направление, создает магнитный поток  , направленный вниз. Ток
, направленный вниз. Ток 
В момент времени  ток
ток  ,
,  ток имеет обратное направление, создает магнитный поток
ток имеет обратное направление, создает магнитный поток  , направленный влево.
, направленный влево.
Направления магнитных осей и магнитных потоков обмоток показаны на рис. 2.16.
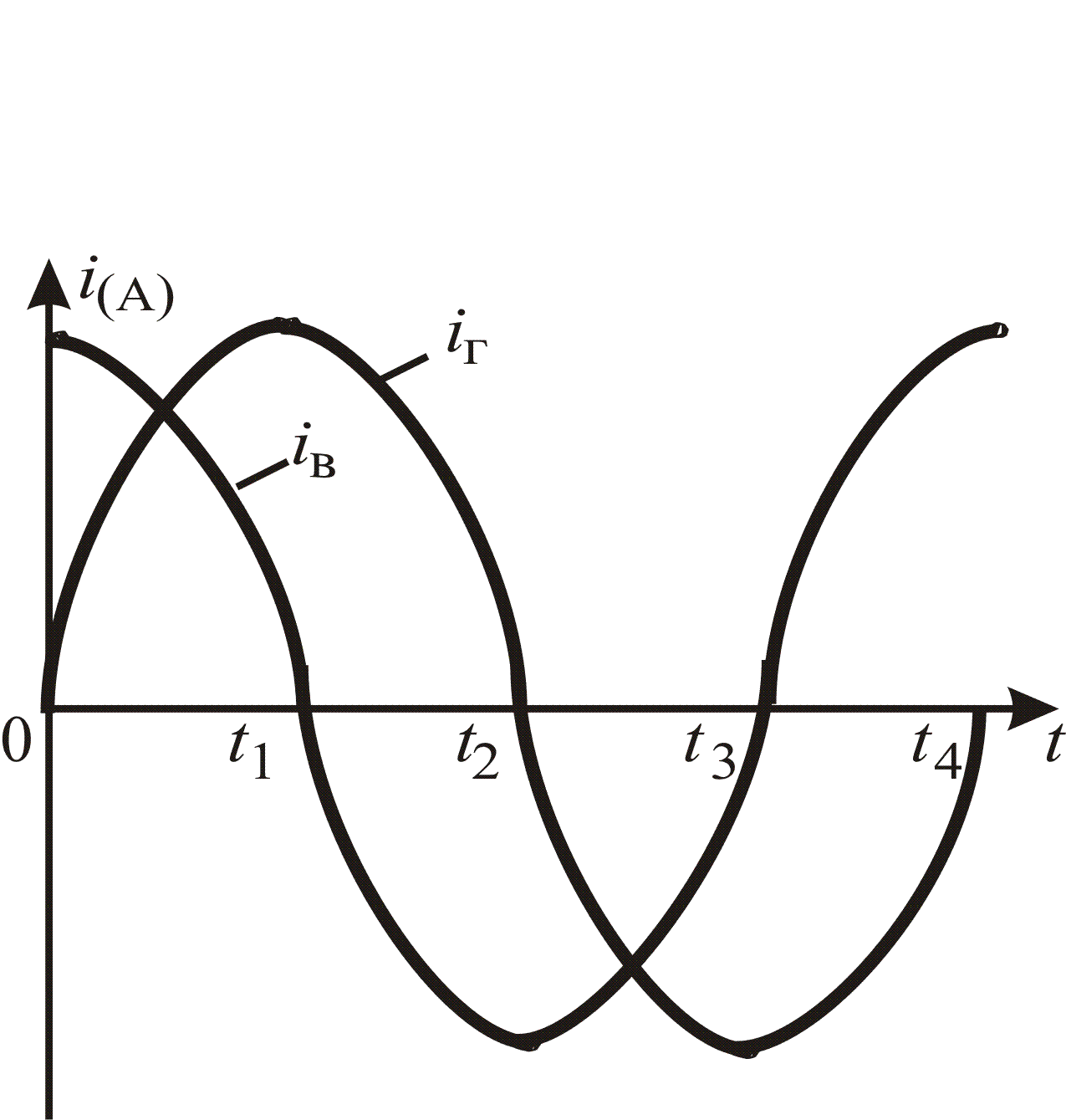
| Рис. 2.15. Напряжения, подаваемые на статорные обмотки АДП | Рис. 2.16. Схема вращающегося электро магнитного поля АДП |
Поскольку магнитный поток  индуцирует в токопроводящем контуре ЭДС, то по короткозамкнутому контуру ротора течет индукционный ток
индуцирует в токопроводящем контуре ЭДС, то по короткозамкнутому контуру ротора течет индукционный ток  . Взаимодействие магнитного потока с индукционным током в роторе создает вращающий момент, который определяется выражением:
. Взаимодействие магнитного потока с индукционным током в роторе создает вращающий момент, который определяется выражением:
где  - коэффициент, учитывающий зависимость индукционного то-
- коэффициент, учитывающий зависимость индукционного то-
ка от ЭДС и частоты вращения ротора.
Тахогенераторные агрегаты
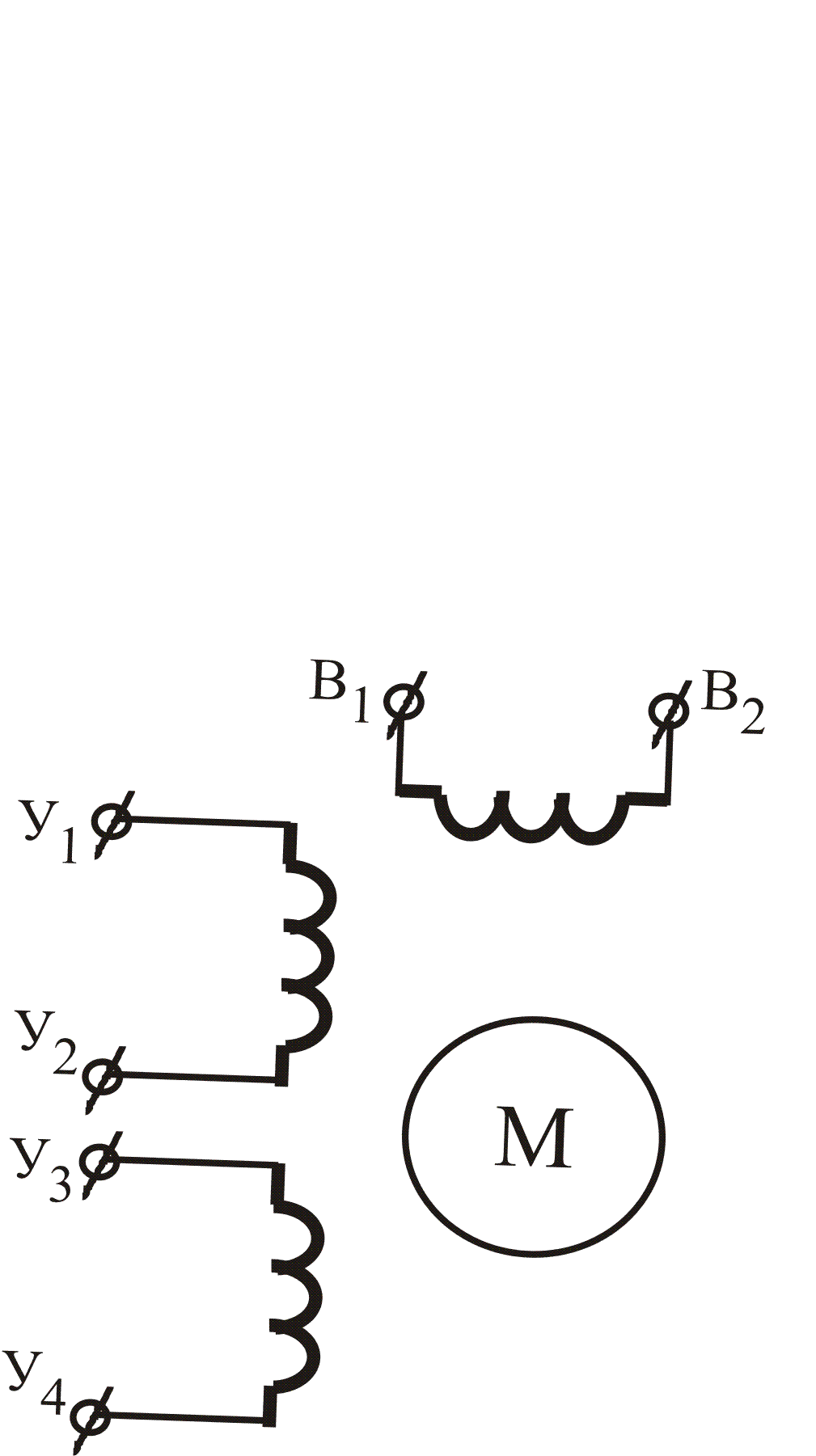
Тахогенераторный агрегат (АДТ) включает в себя асинхронный двигатель с полым ротором (АДП), тахогенератор (АТ) и редуктор, собранные в едином корпусе (рис. 2.17). Электрическая схема тахогенераторного агрегата (асинхронного двигателя с тахогенератором) показана на рис. 2.18.
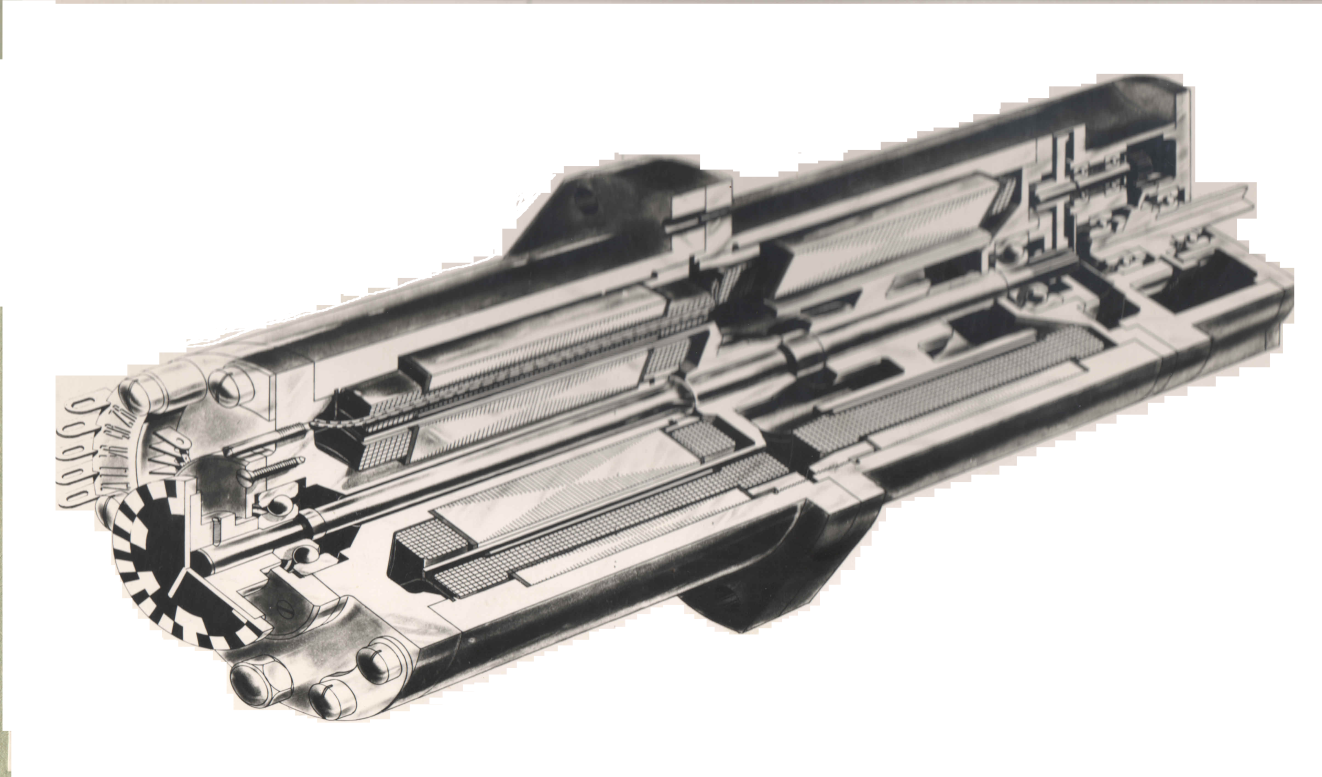
Рис. 2.17. Общая схема тахометрического агрегата в разрезе
АДП имеет три обмотки, уложенные в пазах статора: обмотку возбуждения (В1-В2) и две обмотки управления (У1-У2 и У3-У4).
Обмотки изолированы друг от друга и пространственно сдвинуты на 90°. Обмотка возбуждения питается от сети, обмотка управления – от усилителя.
Для создания вращающегося магнитного поля ток в обмотке возбуждения должен быть смещен по фазе на 90° относительно тока в обмотке управления. Для этого в цепь возбуждения последовательно включен конденсатор.
Рис. 2.18. Электрическая схема АДТ
Скорость вращения ротора при неизменном напряжении возбуждения регулируется изменением напряжения управления, а реверс двигателя – изменением фазы управляющего напряжения.
Принцип работы АДП рассмотрен выше.
Асинхронный тахогенератор, являющийся электромеханическим дифференцирующим элементом, имеет две обмотки: обмотку возбуждения В3В4 и генераторную обмотку Г1Г2. Пространственный сдвиг между ними составляет 90°.
Роторы АДП и АТ насажены на один вал, один конец которого связан с редуктором, а на другой насажен стробоскопический диск, предназначенный для измерения скорости вращения ротора АДТ.
Магнитную систему АТ образуют неподвижные пакеты статора и сердечника, набранные из пластин пермаллоя. В пазы этих пакетов уложены обмотки возбуждения (на статоре) и генераторная (в пазах сердечника). Обе обмотки изолированы друг от друга и пространственно сдвинуты на 90°.
Принцип работы тахогенератора основан на использовании магнитного потока вращающегося ротора, индуцирующего ЭДС в генераторной обмотке.
Магнитный поток обмотки возбуждения индуцирует во вращающемся роторе (полом) ЭДС вращения и индукционный ток. Индукционный ток создает поперечный магнитный поток ротора. Этот магнитный поток индуцирует ЭДС в генераторной обмотке.
Выходная характеристика тахогенератора, т. е. зависимость напряжения от частоты вращения ротора показана на рис. 2.19.
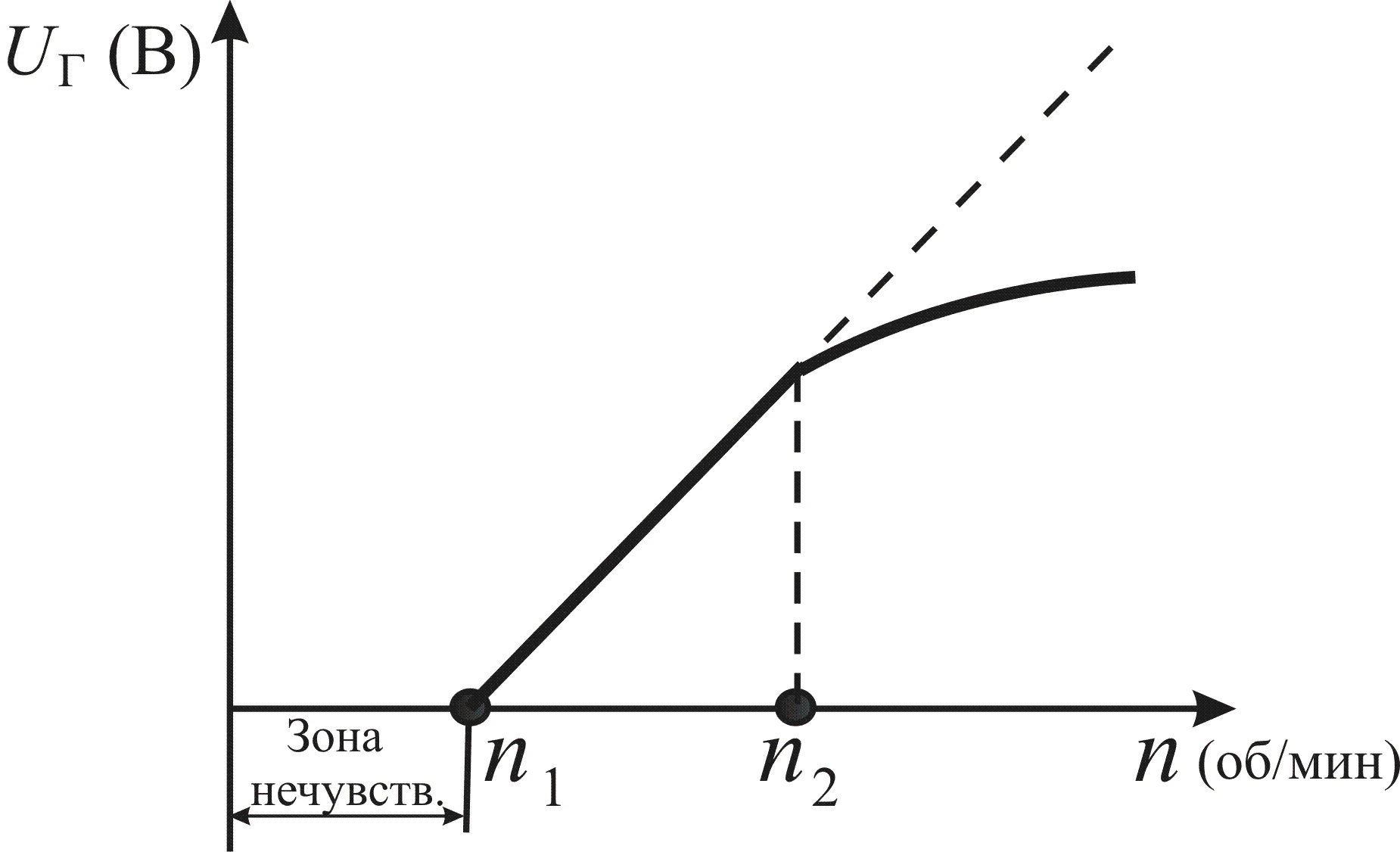
Рис. 2.19. Выходная характеристика АДТ
Анализ выходной характеристики тахогенератора показывает, что напряжение на генераторных обмотках характеризуется линейной зависимостью от частоты вращения ротора только на ограниченном интервале n1-n2 и определяется уравнением:
 ,
,
где k- коэффициент пропорциональности между ЭДС, угловой скоростью вращения ротора и напряжением; ω-угловая скорость вращения ротора  , которая соответствует изменению угла поворота ротора α.
, которая соответствует изменению угла поворота ротора α.
При частоте вращения ротора n < n1 выходное напряжение равно нулю, что свидетельствует о наличии зоны нечувствительности тахогенератора.
Сельсины
Сельсины представляют собой специальные индукционные электрические машины переменного тока с однофазной обмоткой возбуждения и трехфазной обмоткой синхронизации. Сельсины являются основными элементами самосинхронизирующихся синхронных передач (ССП), использующихся для дистанционной передачи и воспроизведения угловых и линейных величин. Электрическая схема сельсина представлена на рисунке 2.20, а схема сельсинной передачи – на рис. 2.21 .
Обмотки возбуждения сельсина-датчика (С-Д) и сельсина-приемника (С-П) питаются от одной сети переменного тока и создают переменные пульсирующие магнитные потоки.
С-Д и С-П проектируются так, что при одинаковом (синфазном) расположении обмоток возбуждения С-Д и С-П по отношению к их вторичным обмоткам, пульсирующими магнитными потоками в соответствующих фазах вторичных обмоток индуктируются равные по величине ЭДС. Следовательно, в любой паре соединенных фаз С-Д и С-П эдс оказываются направленными навстречу друг другу и результирующие эдс равны нулю. Поэтому во вторичных обмотках и не возникает уравнительных токов.
Если же искусственно создать некоторое несовпадение положений роторов С-Д и С-П (рис. 2.20), то в этом случае электродвижущие силы в соответствующих фазах вторичных обмоток, изменяющиеся по синусоидальному закону, окажутся не равными друг другу, в результате чего в этих обмотках возникнут уравнительные токи. Магнитные потоки, вызванные уравнительными токами, взаимодействуя с магнитными потоками возбуждения, создадут вращающие синхронизирующие моменты на валах С-Д и С-П. Эти моменты будут стремиться привести (по кратчайшему пути) роторы С-Д и С-П в согласованное положение, т. е. в одинаковое положение относительно своих статоров.
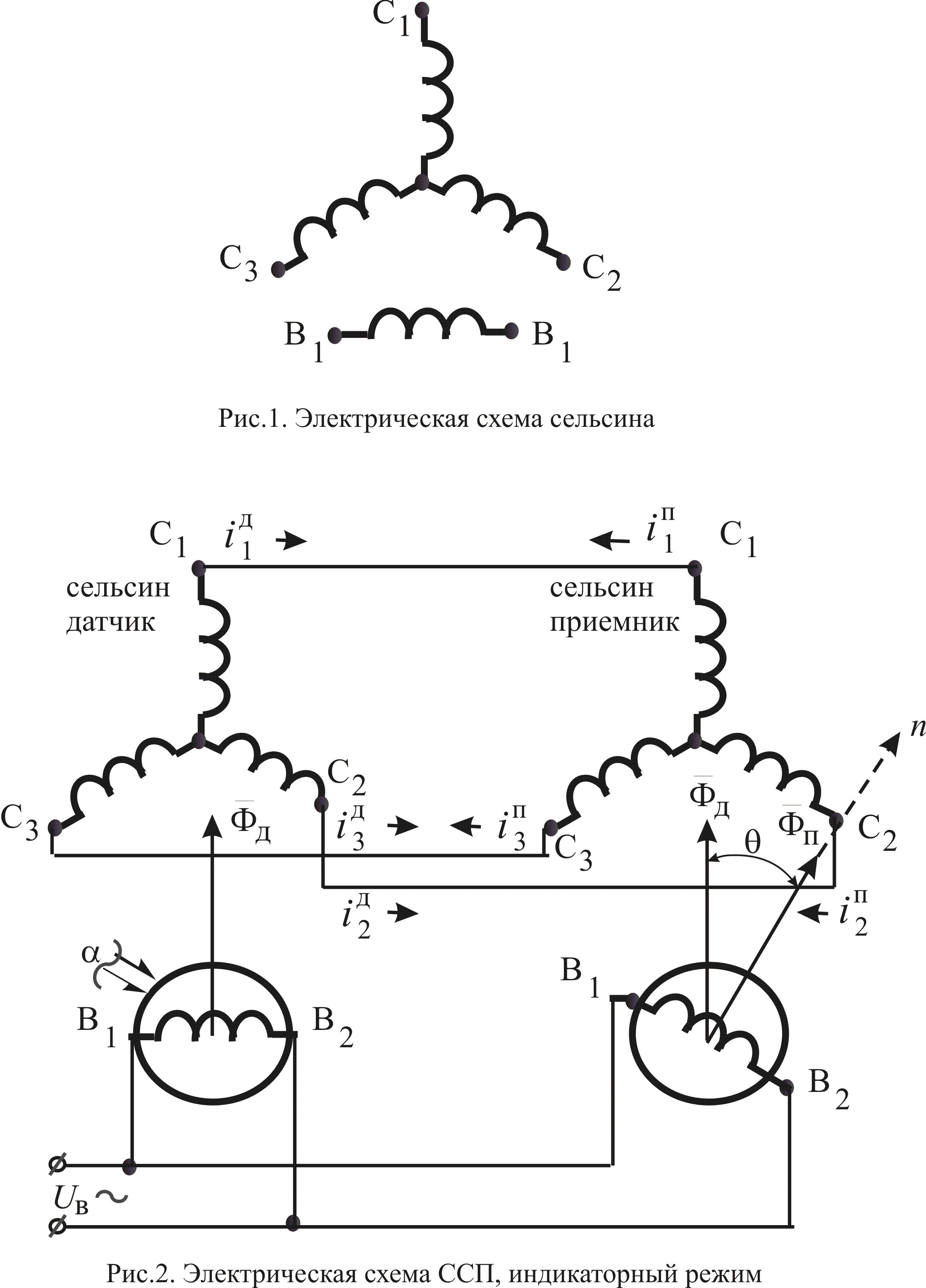
Рис. 2.20. Электрическая схема сельсина
Рис. 2.21. Электрическая схема ССП
Таким образом, именно вращающие моменты на валах С-Д и С-П обеспечивают согласованность (синфазность) работы С-Д и С-П. В идеально выполненных ССП при согласованном положении С-Д и С-П вращающие синхронизирующие моменты отсутствуют (угол θ = 0). Положение при θ = 180о является неустойчивым.
В общем случае зависимость синхронизирующего момента от угла рассогласования выражается формулой

где  – максимальный синхронизирующий момент.
– максимальный синхронизирующий момент.
При малых углах рассогласования (до 5о) синхронизирующий момент практически прямо пропорционален углу рассогласования.
Приращение синхронизирующего момента при увеличении угла рассогласования на 1° называют удельным синхронизирующим моментом.
Синхронное положение ротора С-П наблюдается только в случае отсутствия нагрузки. В реальных условиях всегда имеет место момент трения, слагающийся из трения в подшипниках ротора и трения щеток о контактные кольца ротора. Кроме того, ротор несет на себе нагрузку в виде стрелки, шкалы или различных контактных устройств. Это порождает ошибки приемника, т. е. ошибки в работе следящего привода (будут рассмотрены далее).
По конструкции различают сельсины бесконтактные, в которых обмотка возбуждения и обмотка синхронизации уложены на статоре, и контактные.
Бесконтактные сельсины имеют маркировку БД и БС (БД-160, БС-404А).
Контактный сельсин отличается от бесконтактного тем, что одна из его обмоток (любая) уложена на роторе, а другая - на статоре. Если на роторе уложена обмотка синхронизации, то такой сельсин относится к серии СС, а если там уложена обмотка возбуждения, то это сельсин серии «Нептун». Контактные сельсины имеют маркировку НД и НС (НД-404П, НС-404).
В навигационных системах также применяются малогабаритные сельсины-датчики (НД-294, НД-214) и двойные сельсины-приемники (ДС-400).
Малогабаритные сельсины-датчики представляют собой индукционные машины переменного тока повышенной частоты.
Двойные сельсины-приемники представляют собой конструктивное сочленение двух сельсинов, один из которых выполняется с полой осью, через которую проходит сплошная ось второго. Они предназначены для работы в схемах ССП для автоматического приема углов поворота, поступающих одновременно от двух сельсинов-датчиков, а также для работы в схемах с обратным контролем исполнения команды и в приборах с точными отсчетами.
Дифференциальные сельсины (электрические дифференциалы) – предназначены для воспроизведения суммы или разности угловых перемещений двух ведущих валов, расположенных друг от друга на расстоянии, исключающем применение механических суммирующих устройств (механических дифференциалов).
Дифференциальный сельсин – индукционная электрическая машина двойного питания с распределенными на статоре и роторе двумя трехфазными обмотками. Они могут применяться в качестве как С-Д, так и С-П. При этом С-Д возбуждается тремя переменными напряжениями, создаваемыми простым сельсином-датчиком, и, в свою очередь, генерирует три переменных напряжения, амплитуды и фазы которых определяются разностью положений роторов простого и дифференциального датчиков.
Дифференциальные сельсины выпускаются в габаритах сельсинов и по внешнему виду от них мало отличаются.
Демпферы (механические и электрические) предназначены для гашения собственных колебаний сельсина приемника.
Защитные устройства в схемах ССП предназначены для автоматического отключения от датчиков неисправных приемников. Это устраняет влияние неисправных приемников (короткое замыкание фазной цепи, механическое застопоривание ротора приемника, асинхронных ход приемника и др.) на остальные параллельно включенные исправные приемники. Применяется как индивидуальная, так и групповая защита.
Контрольные вопросы
1. Чем отличается асинхронный двигатель от синхронного?
2. Каков состав АДП, его электрическая схема и выходная характеристика?
3. Как формируется вращающееся электромагнитное поле АДП?
4. Нарисуйте электрическую схему АДТ и объясните характер взаимодействия его составных частей.
5. Что представляет собой сельсин? Для чего он предназначен?
Дата: 2018-12-21, просмотров: 754.