Определение равнодействующей
Аналитическим способом
Знать аналитический способ определения равнодействующей силы, условия равновесия плоской сходящейся системы сил в аналитической форме.
Уметь определять проекции силы на две взаимно перпендикулярные оси, решать задачи на равновесие в аналитической форме.
Проекция силы на ось
Проекция силы на ось определяется отрезком оси, отсекаемым перпендикулярами, опущенными на ось из начала и конца вектора (рис. 3.1).
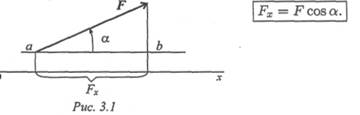
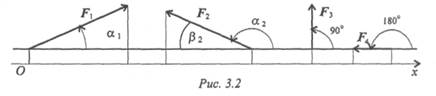
Величина проекции силы на ось равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси. Таким образом, проекция имеет знак: положительный при одинаковом направлении вектора силы и оси и отрицательный при направлении в сторону отрицательной полуоси (рис. 3.2).
20 Лекция 3
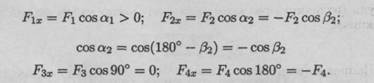
Проекция силы на две взаимно перпендикулярные оси (рис. 3.3).
Определение равнодействующей системы сил аналитическим
способом
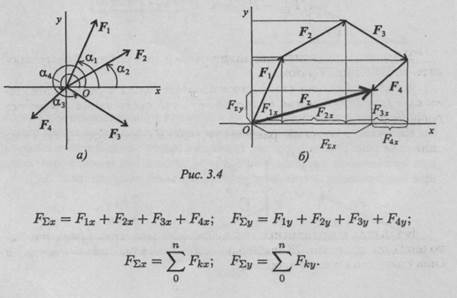
Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определяем равнодействующую геометрическим способом. Выберем систему координат, определим проекции всех заданных векторов на эти оси (рис. 3.4а). Складываем проекции всех векторов на оси х и у (рис. 3.46).
Тема 1.2. Плоская система сходящихся сил 21
Модуль (величину) равнодействующей можно найти по известным проекциям:
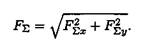
Направление вектора равнодействующей можно определить по величинам и знакам косинусов углов, образуемых равнодействующей с осями координат (рис. 3.5).
Условия равновесия плоской системы сходящихся сил в аналитической форме
Исходя из того, что равнодействующая равна нулю, получим:

Условия равновесия в аналитической форме можно сформулировать следующим образом:
Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую ось равна нулю.
Система уравнений равновесия плоской сходящейся системы сил:

В задачах координатные оси выбирают так, чтобы решение было наиболее простым. Желательно, чтобы хотя бы одна неизвестная сила совпадала с осью координат.
22 Лекция 3
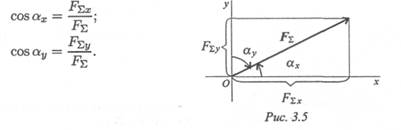
Пример 1. Определить величины и знаки проекций представленных на рис. 3.6 сил.
Решение
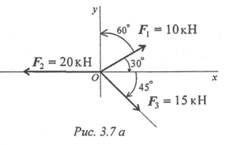
Пример 2. Определить величину и направление равнодействующей плоской системы сходящихся сил аналитическим способом.
Решение
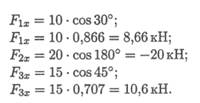
1. Определяем проекции всех сил системы на Ох (рис. 3.7а):
Сложив алгебраически проекции, получим проекцию равнодействующей на ось Ох.
Тема 1.2. Плоская система сходящихся сил 23

Знак говорит о том, что равнодействующая направлена влево.
2. Определяем проекции всех сил на ось Оу значения проекций, получим величину проекции Оу.
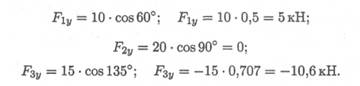
Сложив алгебраически значения проекций, получим величину проекции равнодействующей на ось Оу.

Знак проекции соответствует направлению вниз. Следовательно, равнодействующая направлена влево и вниз (рис. 3.76).
3. Определяем модуль равнодействующей по величинам проекций:
4. Определяем значение угла равнодействующей с осью Ох:

и значение угла с осью Оу:
24 Лекция 3
Пример 3. Система трех сил находится в равновесии. Известны проекции двух сил системы на взаимно перпендикулярные оси Ох и Оу:
Определить, чему равна и как направлена третья сила системы.
Решение
1. Из уравнений равновесия системы определяем:

2. По полученным величинам проекций определяем модуль силы:

3. Направление вектора силы относительно оси Ох (рис. 3.8):
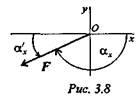

Угол с осью Ох будет равен

Контрольные вопросы и задания
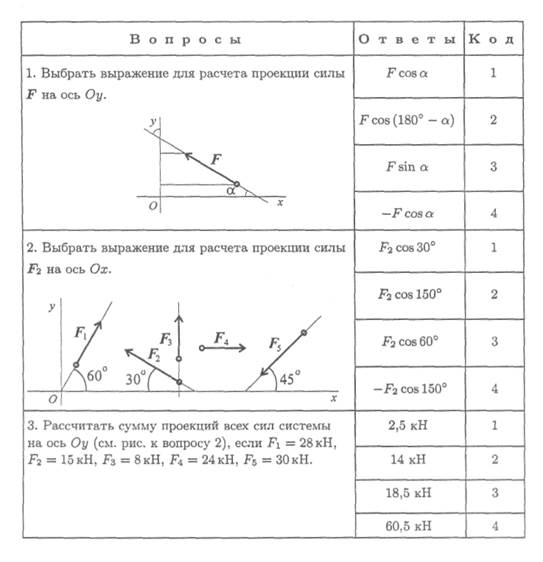
1. Запишите выражение для расчета проекции силы JF на ось Оу (рис. 3.9).

Тема 1.2. Плоская система сходящихся сил 25
2. Определите сумму проекций сил системы на ось Ох
(рис. 3.10). 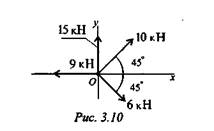
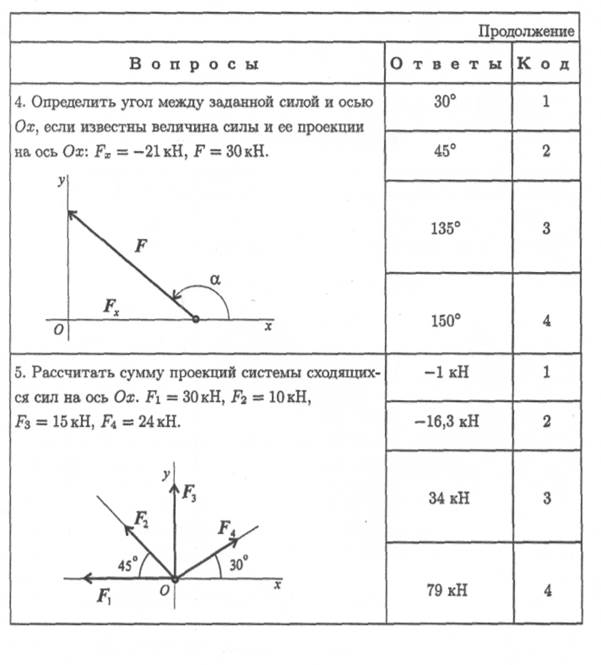
3. Определите величину силы по известным проекциям:

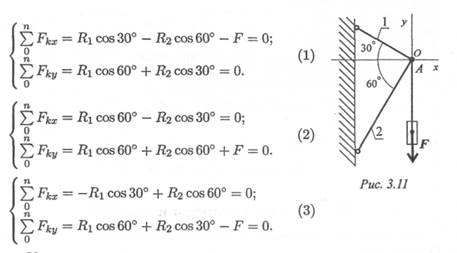
4. Груз находится в равновесии (рис. 3.11). Какая система урав-
нений равновесия для шарнира А записана верно?
Указания.
1. При ответе на вопросы 1 и 2 необходимо знать, что в выраже-
ние для величины проекции силы на ось подставляется угол между
вектором силы и положительной полуосью координат. Не забыть,
что определяется алгебраическая сумма.
2. При ответе на вопрос 4 сначала следует определить возмож-
ные направления реакций в стержнях, мысленно убирая по очереди
26 Лекция 3
стержни и рассматривая возможные перемещения (см. лекцию 1). Затем записать алгебраические суммы проекций сил на оси Ох и Оу. Полученные уравнения сравнить с приведенными. 5. Ответьте на вопросы тестового задания.
Тема 1.2. Статика.
Проекции силы на ось
Тема 1.2. Плоская система сходящихся сил 27
28 Лекция 4
ЛЕКЦИЯ 4
Тема 1.3. Пара сил и момент силы относительно точки
Знать обозначение, модуль и определение моментов пары сил и силы относительно точки, условия равновесия системы пар сил.
Уметь определять моменты пар сил и момент силы относительно точки, определять момент результирующей пары сил.
Пара сил, момент пары сил
Парой сил называется система двух сил, равных по модулю, параллельных и направленных в разные стороны.
Рассмотрим систему сил (F ; F '), образующих пару.
Пара сил вызывает вращение тела и ее действие на тело оценивается моментом. Силы, входящие в пару, не уравновешиваются, т. к. они приложены к двум точкам (рис. 4.1). Их действие на тело не может быть заменено одной силой (равнодействующей).
Момент пары сил численно равен произведению модуля силы на расстояние между линиями действия сил (плечо пары).
Момент считают положительным, если пара вращает тело по часовой стрелке (рис. 4.16): M (F ; F ') = Fa ; M > 0.
 Плоскость, проходящая через линии действия сил пары, называется плоскостью действия пары.
Плоскость, проходящая через линии действия сил пары, называется плоскостью действия пары.
Свойства пар (без доказательств):
1. Пару сил можно перемещать в плоскости ее действия.
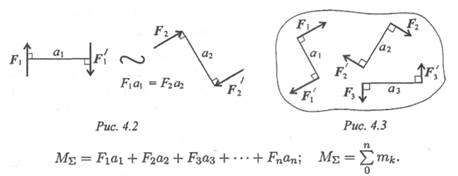
2. Эквивалентность пар. Две пары, моменты которых равны,
(рис. 4.2) эквивалентны (действие их на тело аналогично).
Тема 1.3. Пара сил и момент силы относительно точки 29
3. Сложение пар сил. Систему пар сил можно заменить равно действующей парой.
Момент равнодействующей пары равен алгебраической сумме моментов пар, составляющих систему (рис. 4.3):
4. Равновесие пар.
Для равновесия пар необходимо и достаточно, чтобы алгебраическая сумма моментов пар системы равнялась нулю:

Момент силы относительно точки
Сила, не проходящая через точку крепления тела, вызывает вращение тела относительно точки, поэтому действие такой силы на тело оценивается моментом.
Момент силы относительно точки численно равен произведению модуля силы на расстояние от точки до линий действия силы. Перпендикуляр, опущенный из точки на линию действия силы (рис. 4.4), называется плечом силы.
Обозначение момента Mo {F) или mo (F); 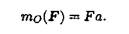

Единица измерения [ mo (F)] = Н•м.
Момент считается положительным, если сила разворачивает тело по часовой стрелке.
30 Лекция 4
Примечание. В разных учебных пособиях знак момента назначается по-разному.
Момент силы относительно точки равен нулю, если линия действия силы проходит через точку, т. к. в этом случае расстояние от точки до силы равно нулю.
Примеры решения задач
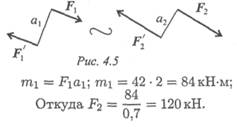
Пример 1. Дана пара сил |Fi| = \ F [\ = 42кН; плечо 2 м. Заменить заданную пару сил эквивалентной парой с плечом 0,7 м (рис. 4.5).
Решение
Пары сил эквивалентны, если моменты этих пар численно равны:

Пример 2. Дана система пар сил (рис. 4.6). Определить момент результирующей пары.
Решение
Момент результирующей пары равен алгебраической сумме моментов пар системы: n
M Σ = Σ m k .
0

Подставив численные значения, получим: 
Знак свидетельствует о том, что момент вызывает вращение по часовой стрелке. Величину силы и плеча определить не удается.
Примечание. Чтобы уравновесить данную систему пар , необходимо приложить пару сил , равную по модулю и направленную
Тема 1.3. Пара сил и момент силы относительно точки 31
в обратную сторону. Такую пару сил называют уравновешивающей.
Пример 3. Рассчитать сумму моментов сил относительно точки О (рис. 4.7).
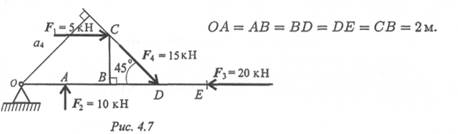
Решение
1. Момент силы относительно точки численно равен произведению модуля силы на плечо силы.
2. Момент силы равен нулю, если линия действия силы проходит через точку.
Контрольные вопросы и задания
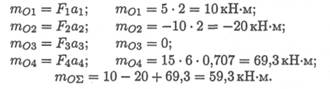
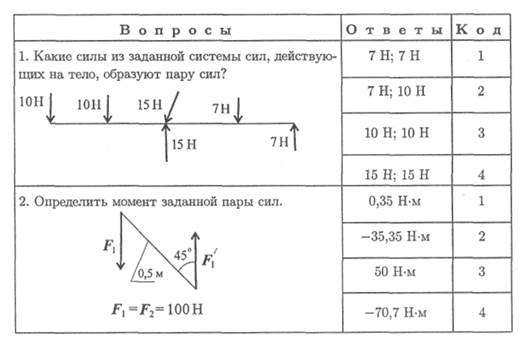
1. Какие силы из системы сил (рис. 4.8) образуют пары?
F 1 = F2 = F4; F3 = F6; F5 = 0,9F6.
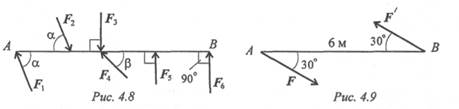
2. Определите момент изображенной на рис. 4.9 пары сил.
|F| = |F'| = 5kH.
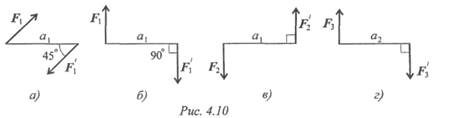
3. Какие из изображенных пар ( рис. 4.10 ) эквивалентны , если
F 1 = F 2 = 8кН; F3 = 6,4кН; a1 = 2м; а2 = 2,5м?
32 Лекция 4
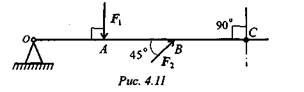
4. Какую силу необходимо приложить в точке С (рис. 4.11), чтобы алгебраическая сумма моментов относительно точки О была равна нулю? ОА= АВ = ВС = 5м; F 1 = 7,8 кН; F 2 = 3 кН.
5. Ответьте на вопросы тестового задания.
Тема 1.3. Статика
Тема 1.3. Пара сил и момент силы относительно точки 33

2 - 8060 Олофинская
34 Лекция 5
ЛЕКЦИЯ 5
Тема 1.4. Плоская система произвольно расположенных сил
Иметь представление о главном векторе, главном моменте, равнодействующей плоской системы произвольно расположенных сил.
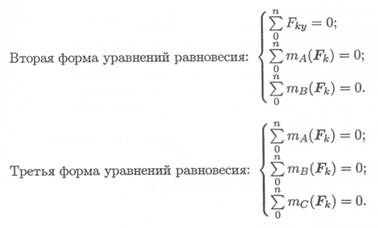
Знать теорему Пуансо о приведении силы к точке, приведение произвольной плоской системы сил к точке, три формы уравнений равновесия.
Уметь заменять произвольную плоскую систему сил одной силой и одной парой.
Теорема Пуансо о параллельном переносе сил
Силу можно перенести параллельно линии ее действия, при этом нужно добавить пару сил с моментом, равным произведению модуля силы на расстояние, на которое перенесена сила.
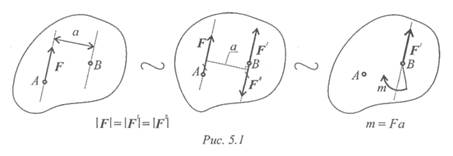
Дано: сила в точке А (рис. 5.1).
Добавим в точке В уравновешенную систему сил ( F 1 ; F "). Образуется пара сил ( F ; F "). Получим силу в точке В и момент пары т.
Приведение к точке плоской системы
произвольно расположенных сил
Линии действия произвольной системы сил не пересекаются в одной точке, поэтому для оценки состояния тела такую систему следует упростить
Тема 1.4. Плоская система произвольно расположенных сил 35
Для этого все силы системы переносят в одну произвольно выбранную точку — точку приведения. Применяют теорему Пуансо. При любом переносе силы в точку, не лежащую на линии ее действия, добавляют пару сил.
Появившиеся при переносе пары называют присоединенными парами.
Дана плоская система произвольно расположенных сил (рис. 5.2).
Переносим все силы в точку О. Получим пучок сил в точке О, который можно заменить одной силой — главным вектором системы. Образующуюся систему пар сил можно заменить одной эквивалентной парой — главным моментом системы.
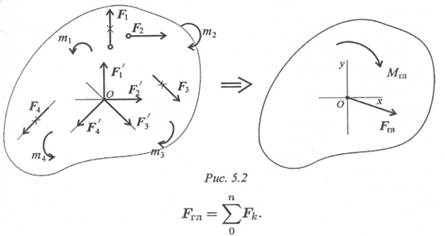
Главный вектор равен геометрической сумме векторов произвольной плоской системы сил. Проецируем все силы системы на оси координат и, сложив соответствующие проекции на оси, получим проекции главного вектора.

По величине проекций главного вектора на оси координат находим модуль главного вектора:
36 Лекция 5
Главный момент системы сил равен алгебраической сумме моментов сил системы относительно точки приведения.
Таким образом, произвольная плоская система сил приводится к одной силе (главному вектору системы сил) и одному моменту (главному моменту системы сил).
Влияние точки приведения
Точка приведения выбрана произвольно. При изменении положения точки приведения величина главного вектора не изменится.
Величина главного момента при переносе точки приведения изменится, т. к. меняются расстояния от векторов-сил до новой точки приведения.
С помощью теоремы Вариньона о моменте равнодействующей можно определить точку на плоскости, относительно которой главный момент равен нулю. Тогда произвольная плоская система сил может быть заменена одной силой.
Эту силу называют равнодействующей системы сил.
Численно равнодействующая равна главному вектору системы сил, но приложена в другой точке, относительно которой главный момент равен нулю. Равнодействующую принято обозначать F Σ .
Численно ее значение определяется так же, как главный вектор системы сил:
Точку приложения равнодействующей можно определить по формуле

где d — расстояние от выбранной точки приведения до точки приложения равнодействующей;
Тема 1.4. Плоская система произвольно расположенных сил 37
Мгл — величина главного момента относительно выбранной точки приведения;
F гл — величина главного вектора системы сил.
Частные случаи приведения системы сил к точке
При приведении системы сил к точке возможны следующие варианты:
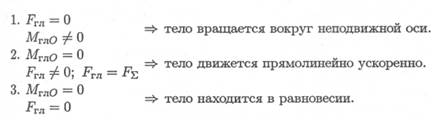
Условие равновесия произвольной плоской системы сил
1. При равновесии главный вектор системы равен нулю (Fгл = 0).
Аналитическое определение главного вектора приводит к выводу:
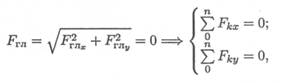
где F kx и F ky — проекции векторов на оси координат.
2. Поскольку точка приведения выбрана произвольно, ясно, что
при равновесии сумма моментов сил системы относительно любой
точки на плоскости должна равняться нулю:
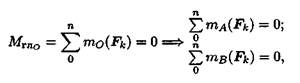
где А и В — разные точки приведения.
38 Лекция 5
Условие равновесия произвольной плоской системы сил может быть сформулировано следующим образом:
Для того чтобы твердое тело под действием произвольной плоской системы сил находилось в равновесии, необходимо и достаточно, чтобы алгебраическая сумма проекций всех сил системы на любую ось равнялась нулю и алгебраическая сумма моментов всех сил системы относительно любой точки в плоскости действия сил равнялась нулю.
Получим основную форму уравнения равновесия:
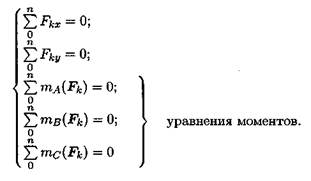
Теоретически уравнений моментов можно записать бесконечное множество, но практически доказано, что на плоскости можно составить только три независимых уравнения моментов и при этом три точки (центры моментов) не должны лежать на одной линии.
Таким образом, имеем пять независимых уравнений равновесия.
Практически для решения задач на плоскости достаточно трех уравнений равновесия. В каждом конкретном случае используются уравнения с одним неизвестным.
Для разных случаев используются три группы уравнений равновесия.

Тема 1.4. Плоская система произвольно расположенных сил 39
Для частного случая, если уравновешена система параллельных сил, можно составить только два уравнения равновесия:
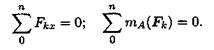
Ось Ох системы координат параллельна линии действия сил.
Примеры решения задач
Пример 1. Найти момент присоединенной пары при переносе силы F 3 в точку В (рис. 5.3). F 1 = 10кН; F 2 = 15кН; F3 = 18кН; а = 0,2 м.
Решение
Используем теорему Пуансо. Мв(-Рз) = 18 • 0,2 = 3,6кН-м. 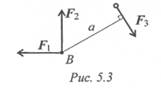
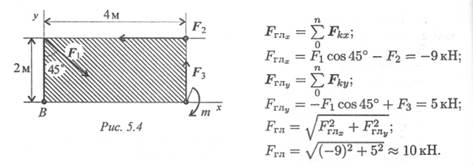
Пример 2. Найти главный вектор системы (рис. 5.4).
F1 = 10 кН; F 2 = 16 кН; F3 = 12 кН; т = 60кН-м.
Решение
Главный вектор равен геометрической сумме сил:
40 Лекция 5
Пример 3. Найти главный момент системы относительно точки В (использовать данные примера 2).
Решение
Главный момент равен алгебраической сумме моментов сил относительно точки приведения:
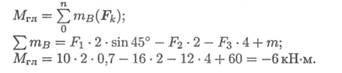
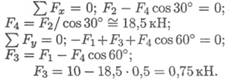
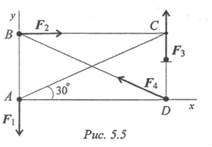
Пример 4. К телу приложена уравновешенная система сил (рис. 5.5). Две из них неизвестны. Определить неизвестные силы. F1 = 10kH; F2 = 16kH.
Наносим оси координат и используем уравнения равновесия:
Контрольные вопросы и задания
1. Чему равен главный вектор системы сил?
2. Чему равен главный момент системы сил при приведении ее к точке?
Тема 1.4. Плоская система произвольно расположенных сил 41
3. Чем отличается главный вектор от равнодействующей плоской системы произвольно расположенных сил?
Выбрать из предложенных ответов:
— величиной;
— направлением;
— величиной и направлением;
— точкой приложения;
— ничем.
4. Тело движется равномерно и прямолинейно (равновесие). Чему равны главный вектор и главный момент системы?
5. Тело вращается вокруг неподвижной оси.
Чему равны главный вектор и главный момент действующей на него системы сил?
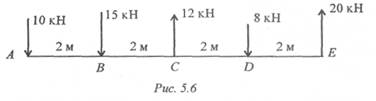
6. Найдите главный вектор и главный момент системы сил, если центр приведения находится в точке А (рис. 5.6).
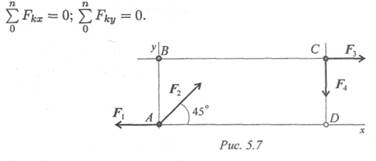
7. Какое еще уравнение равновесия нужно составить, чтобы убедиться в том, что система сил (рис. 5.7) находится в равновесии?
42 Лекция 6
ЛЕКЦИЯ 6
Тема 1.4. Балочные системы.
Дата: 2018-12-21, просмотров: 2631.