Основная задача, стоящая перед создателями манипуляционных роботов, заключается в повышении их эффективности и облегчении условий работы оператора путем автоматизации процесса управления при выполнении типовых повторяющихся операций. Ее решение во многом зависит от выбора метода управления роботом.
Требования, предъявляемые к системе управления при выполнении различных операций, достаточно противоречивы. Так, для транспортирования грузов с помощью манипулятора требуется высокая точность позиционирования захвата при движении по задаваемой оператором траектории, особенно при наличии препятствий, а для выполнения операций при силовом взаимодействии с объектом, например, при сборке, шлифовании с помощью манипулятора и т.п., необходимо, чтобы система управления обладала свойством «податливости». В ряде случаев, например при выполнении «тонких» операций, необходимо обеспечить возможность дозирования развиваемых сил и моментов в рабочем органе манипулятора.
Очевидно, что каждый из рассмотренных способов управления обладает различной эффективностью при выполнении разнообразных конкретных операций, поэтому выбор одного из них для выполнения определенных технологических операций может значительно осложнить, а иногда и сделать невозможным выполнение других. Ограниченные возможности системы управления оператор всегда вынужден компенсировать повышенным вниманием и более осторожной работой. Это неизбежно приводит к его быстрой утомляемости и существенно снижает эффективность работы всего манипуляционного робота.
Очевидно, что наиболее перспективным является применение комбинированных систем управления манипуляционным роботом, которые могут допускать возможность работы в различных режимах. Оператор выбирает тот или иной режим в зависимости от вида и условий выполняемой работы. Это может сопровождаться изменением структуры и параметров системы управления манипулятором.
Реализация таких комбинированных систем управления возможна на основе использования совершенных, как правило, микропроцессорных устройств управления. Именно развитие микропроцессорной техники позволило приступить к созданию систем управления манипуляторами, которые могут обеспечить широкие функциональные возможности робота. Применение микроЭВМ позволяет сравнительно просто реализовать дистанционные и автоматические режимы управления как по заранее введенным программам выполнения простейших операций, так и по формируемым в процессе обучения робота программам. Именно такие системы дистанционно-автоматического управления наиболее предпочтительны для выполнения сложных и нетиповых работ в изменяющихся условиях рабочей зоны.
Система управления обеспечивает связь с используемыми в манипуляционном роботе ЗУ и датчиками исполнительного механизма, переработку информации, получаемой от них, формирование управляющих сигналов на задающие и исполнительные устройства в соответствии с заложенными законами и методами управления.
Важной особенностью системы дистанционно-автоматического управления робота является возможность проведения работ в различных режимах, наиболее эффективных в конкретной ситуации. Все элементы операций, поддающиеся формализации и программированию (в том числе с простейшей адаптацией), особенно те, которые часто повторяются, выполняются роботом в автоматическом режиме с управлением от ЭВМ. Оператор в этом случае лишь наблюдает за действиями робота. Программы для автоматического режима могут быть либо составлены заранее и вызываться оператором по мере надобности, либо вводиться в память ЭВМ путем обучения робота, когда оператор с помощью ЗУ перемещает в дистанционном режиме исполнительный механизм, движение которого программируется для последующего многократного повторения в автоматическом режиме.
Запрограммированные элементы операций могут сочетаться в различных комбинациях, причем необходимая последовательность их выполнения задается каждый раз либо программным путем, либо в супервизорном режиме, когда оператор с помощью пульта управления выполняет переключение программ или вызывает целый их цикл для обеспечения запрограммированных операций (принять исходное положение, взять инструмент и прибыть в заданную точку рабочей зоны и т. п.). Затем оператор включает другую программу автоматического проведения роботом последующей операции.
Режим дистанционного управления применяется оператором в любых незапрограммированных ситуациях или в случаях отказа автоматической системы управления. При этом оператор использует ЗУ на своем пульте управления.
Принцип взаимодействия элементов системы дистанционно-автоматического управления манипуляционного робота может быть рассмотрен по схеме, представленной на рисунке 2.3.
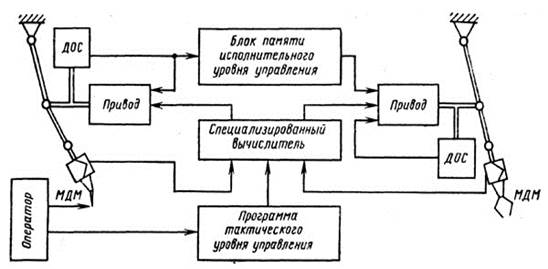
Рисунок 2.3 – Схема системы дистанционно-автоматического управления манипуляционного робота
Система включает исполнительные приводы, управляющие положением звеньев в каждой степени подвижности исполнительного манипуляционного механизма, а также ЗУ. Каждая из исполнительных систем замкнута по положению. На входы систем сигналы поступают со специализированного вычислителя-переобразователя координат. В кистевых узлах исполнительного и задающего устройств встроены многокоординатные датчики моментов МДМ, формирующие сигналы по векторам моментов, действующих со стороны оператора и объекта манипулирования.
Полуавтоматическое управление роботом может осуществляться как в позиционном копирующем режиме, так и в скоростном, а также с использованием силового очувствления. Выполнение наиболее сложных операций, не внесенных в программу автоматических режимов работы манипулятора при его взаимодействии с объектами в рабочей недетерминированной зоне, может осуществляться при копирующем управлении с силовым очувствлением. При этом сигналы многостепенных моментных датчиков сравниваются в управляющей ЭВМ.
Суммарный сигнал, обусловленный моментом оператора и нагрузочным моментом, поступает на специализированный вычислитель-преобразователь координат, который формирует управляющие воздействия на приводы каждой степени подвижности робота.
Система управления может также содержать устройства интегрирования сигналов, которые формируют сигналы управления по положению при наличии сигналов по моменту. Подобная система позволяет придать манипуляционному роботу свойства двустороннего действия, что обеспечивает наиболее эффективную работу оператора в сложных ситуациях.
При выполнении транспортных операций в свободном пространстве рабочей зоны и ряда других легко программируемых операций использование копирующего режима малоэффективно. В этих случаях применяется автоматический или полуавтоматический режим работы робота. В непредвиденных ситуациях для этого используется метод управления по разности векторов моментных воздействий со стороны оператора и со стороны нагрузки при заторможенном ЗУ. Реализация такого способа управления обеспечивается фиксацией ЗУ в исходном (наиболее удобном для оператора) положении.
Использование принципов дистанционно-автоматического управления придает манипуляционной робототехнической системе широкие функциональные возможности.
Возможно дифференцированное использование принципов дистанционно-автоматического управления для осуществления движений различными суставами ИУ манипуляционного робота. Например, транспортные движения могут иметь автоматическое, т. е. заранее запрограммированное, управляющее воздействие и осуществлять вывод кистевого узла манипулятора в заданную точку рабочего пространства. В то же время управление локальными движениями в кистевых суставах, как правило, требует учета воздействий со стороны объекта работ, поэтому такое управление рационально осуществлять в дистанционном режиме с очувствлением по значению этого силового воздействия.
Особенно актуально применение принципов комбинированного управления при выполнении сложных сборочных операций и при достаточно детерминированных условиях взаимодействия с технологической оснасткой в рабочей зоне, когда определенная податливость захвата требуется на ограниченном пространстве рабочей зоны. Совместное использование принципов автоматического и дистанционного управления дает положительный эффект при дистанционной коррекции траекторий и законов движения ИУ робота, осуществляемого в автоматическом режиме.
Действительно, если программа движений в автоматическом режиме не требует изменений, но на каком-либо отрезке траектории движения необходимо ее скорректировать, то возможно использование параллельно действующего дистанционного режима управления. Это существенно упрощает процедуру выполнения операций в изменяющихся условиях внешней среды.
С другой стороны, параллельная работа в различных режимах возможна при дистанционном управлении манипулятором, находящимся на подвижном основании. В этом случае целью автоматического управления положением рабочего органа манипулятора может быть стабилизация его положения в пространстве, причем это осуществляется управлением по каждой степени подвижности ИУ от специального информационно-измерительного устройства, определяющего отклонение конечной точки манипулятора от исходного положения, вызванного подвижностью основания. Очевидно, что это возможно лишь в ограниченном диапазоне перемещений.
Автоматическая стабилизация положения в пространстве кистевого узла манипулятора существенно упрощает режим дистанционного управления при выполнении сложной операции. Это является наиболее важным, например, при выполнении подводно-технических работ с помощью манипулятора, размещенного на подводном аппарате, который находится в так называемом состоянии зависания над объектом и испытывает воздействие течений водной среды.
Очевидно, что совместное параллельное или последовательное использование режимов дистанционного и автоматического управления требует применения вычислительной аппаратуры, способной осуществлять это сложное управление в реальном времени.
Дата: 2019-12-10, просмотров: 490.