Отличительным признаком дистанционно управляемых манипуляционных роботов, однозначно выделяющим их из всего семейства робототехнических систем, является обязательное участие человека-оператора в процессе управления их действиями. Способность человека к быстрой ориентации в рабочей обстановке, анализу окружающей среды, принятию решений и выбору алгоритмов выполнения технологических операций, формированию рациональных законов движения в процессе работы – все эти естественные для него возможности весьма сложно реализуются даже с помощью самых совершенных систем восприятия информации и управляющих систем с элементами искусственного интеллекта.
Именно этим определяется необходимость использования дистанционного управления для выполнения нетиповых и сложных технологических операций в недетерминированных условиях рабочей зоны. Очевидно, что дистанционное управление оказывается единственно возможным способом обеспечения функционирования манипуляционных роботов в средах, недоступных для человека или опасных для его здоровья.
Первый опыт в использовании дистанционно управляемых манипуляторов был накоплен еще в пятидесятые годы двадцатого столетия при создании копирующих манипуляционных механизмов, выполняющих в боксах и камерах исследовательские работы с радиоактивными веществами. Именно в тот период была подтверждена возможность воспроизведения двигательных функций руки человека на расстоянии. Механические манипуляторы включали кинематически подобные задающее и исполнительное устройства, связанные между собой с помощью тросов и лент таким образом, что все изменения взаимного расположения звеньев задающего устройства (ЗУ) повторялись (копировались) соответствующими звеньями исполнительного устройства (ИУ). Это позволяет в рабочей зоне воспроизводить с достаточной степенью точности движения кисти руки оператора, управляющего положением в пространстве кистевого узла ЗУ. Важной особенностью подобных манипуляторов является возможность ощущения оператором усилий, действующих со стороны объекта манипулирования на ИУ. Это дает возможность оператору формировать законы движения задающего, а, следовательно, и исполнительного устройств с учетом воздействия нагрузки, т. е. так, как это происходит при выполнении человеком работ непосредственно рукой.
Таким образом, механические копирующие манипуляторы обладают свойством двунаправленной передачи не только перемещений, но и усилий. Образно говоря, они как бы увеличивают возможности рук человека, «удлиняя» их и позволяя войти в зоны, недоступные самому человеку.
Опыт создания отечественных копирующих манипуляторов позволил обеспечить отработку принципа дистанционного проведения работ при непосредственном наблюдении оператором условий в рабочей зоне.
Однако существенными недостатками таких манипуляторов являются малая удаленность оператора от опасной зоны, небольшая грузоподъемность, определяемая физическими возможностями оператора, а также существенные потери развиваемых оператором усилий на преодоление трений в механических передачах. Это привело к необходимости разработки и создания уже в полном смысле дистанционно управляемых манипуляторов, оснащенных не только системами управления движением исполнительных манипуляционных устройств, но и развитой информационной системой. Задачами этих систем является обеспечение наибольшей естественности работы оператора, создание эффекта его присутствия в рабочей зоне при выполнении технологических операций.
Большое значение создания дистанционно управляемых манипуляторов определяется широким развитием исследовательских и практических работ, связанных с освоением подводного и космического пространств, а также с созданием атомной и термоядерной энергетики.
Во всех указанных случаях в экстремальных для человека условиях, как правило, выполняются разнообразные операции в изменяющихся условиях рабочей зоны, что требует использования высокоманевренных манипуляционных механизмов.
Однако использование дистанционного управления оказалось эффективным не только для манипуляторов, предназначенных для работы в экстремальных средах. Бурно развивающаяся промышленная робототехника также все чаще обращается к этому методу управления, позволяющему существенно расширить функциональные возможности манипуляционных роботов с автоматическим управлением. Именно в промышленной робототехнике стали все шире использоваться и наиболее прогрессивные принципы дистанционно-автоматического управления.
Использование современной вычислительной и в первую очередь управляющей микропроцессорной техники позволило довести дистанционное управление манипуляционными роботами до уровней диалогового управления, при котором участие человека-оператора характеризуется рациональным сочетанием возможностей естественного интеллекта человека и искусственного интеллекта информационных и управляющих систем робота.
Рассмотрим основные методы дистанционного управления манипуляторами и манипуляционными роботами, которые достаточно однозначно можно соотнести с уровнями управления иерархической системы автоматического управления различных поколений роботов.
Понятие об уровнях управления в робототехнике было впервые введено Е. П. Поповым [3] и является обобщающим как для роботов с автоматическим управлением, так и для дистанционно управляемых манипуляциониых роботов.
Иерархическая схема робототехнической системы может быть достаточно однозначно представлена в виде четырех основных уровней управления (см. рисунок 2.1).
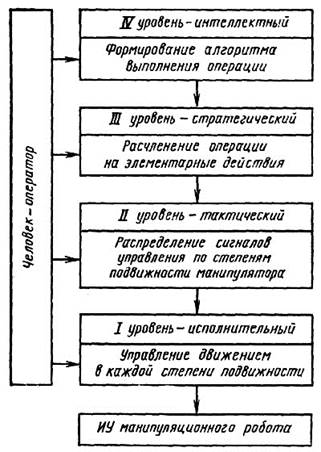
Рисунок 2.1 – Обобщенная схема дистанционного управления манипуляционным роботом
Первый уровень управления, называемый исполнительным, обеспечивает организацию управления движением отдельно в каждой степени подвижности ИУ манипуляционного робота. Распределение сигналов управления по степеням подвижности осуществляется на втором – тактическом уровне управления. Поэтому входной информацией для него является траектория и закон движения конечной точки манипулятора, т. е. рабочего органа, в частном случае – захватного устройства (захвата).
Формирование траекторий и законов движения манипулятора при выполнении элементарной операции происходит на стратегическом уровне управления путем расчленения операции на элементарные действия и движения. Следовательно, входной информацией на этом уровне является формализованное представление всей операции в целом.
На высшем, интеллектном уровне управления осуществляется формирование алгоритма выполнения каждой операции с учетом общих задач технологического процесса и обстановки в зоне проведения работ.
Человек-оператор, обладающий возможностью восприятия, анализа условий выполнения работ и принятия решения, может обеспечить управление на каждом из этих уровней. Однако наличие любого из верхних уровней управления усложняет техническую реализацию всей робототехнической системы, поэтому формирование иерархической структуры системы управления необходимо проводить с учетом возможностей ее технической реализации для каждого объекта автоматизации технологического процесса.
Дата: 2019-12-10, просмотров: 410.