Пояснительная
Записка
к ________________дипломному проекту_________________________
(дипломному проекту (работе); выпускной работе бакалавра, магистра)
на тему: __«Распределенная система терминального управления техническим объектом»
студент группы Зиновьев Константин Игоревич_________
(фамилия, имя, отчество)
Направление подготовки (специальность) _____7.091401 – системы управления и автоматики
Руководитель Альчаков В.В., ассистент кафедры ТК
(фамилия, инициалы, должность)
Консультанты _______ ( _______ )
___________________ ( ________ )
___________________ ( _______ )
______ ________ (________ )
Зав. кафедрой __________ (Краснодубец Л.А.)
Г.
Министерство образования и науки Украины
Севастопольский национальный технический университет
«Согласованно»
руководитель дипломного проекта
________________ (В.В. Альчаков)
«Утверждаю»
заведующий кафедрой ТК
______________ (Л.А. Краснодубец)
Техническое задание
К дипломному проекту
«Распределенная система терминального управления техническим объектом»
Исполнитель:
ст. гр. А-61з
_________________ (Зиновьев К.И.)
« ___ » ________________ 2005 г.
Нормоконтролер:
_________________ (Шушляпин Е.А.)
« ___ » ________________ 2005 г.
2005
Основание для разработки
Основанием для разработки дипломного проекта на тему «Распределенная система терминального управления техническим объектом» служит приказ ректора № 124п от 30.03.2005.
Назначение разработки
Разрабатываемая система предназначена для построения компьютерной программы управления распределенной системой терминального управления сложными техническими объектами, функционирующими в условиях, опасных для жизни человека.
3 Технические требования
Требования к условиям эксплуатации
Разработанная система должна эксплуатироваться на IBM совместимых компьютерах в помещении, соответствующем санитарным нормам, а, именно: площадью на одного человека не менее 4,5 м2 и объёмом воздуха 15 м3. В помещении должны поддерживаться следующие метеорологические условия:
- в холодный период температура воздуха 20° – 30° С, относительная влажность 40 – 60%;
- в теплый период температура воздуха 22° – 25° С, относительная влажность 40 – 60%.
Требования к составу и параметрам технических средств
Для эффективной работы программы необходим персональный компьютер типа IBM PC со следующими параметрами:
- процессор семейства Intel Pentium (Celeron)/AMD с тактовой частотой не менее 500 КГц;
- оперативная память (128 Mb);
- видеопамять (32 Мб)
- операционная система Windows 98/NT/2000/Me/XP;
- накопитель на жестком магнитном диске (20 Гб);
- принтер (при необходимости вывода информации на печать);
- монитор SVGA;
- манипулятор типа «мышь».
Требования упаковке и хранению
Программное обеспечение распределенной системы терминального управления распространяется в виде отдельного исполнительного файла, для хранения которого на жестком диске персонального компьютера отводится отдельная директория. Для поставки заказчику, могут использоваться любые накопители (лазерные диски, flash-диски). Ввиду достаточно большого объема исполнительного файла не рекомендуется использовать гибкие магнитные диски.
Требования к программному обеспечению (ПО)
Требования, предъявляемые к разрабатываемому программному продукту (ПП) заключаются в следующем:
- ПП должен функционировать под управлением операционной системы семейства MS Windows.
- ПП должен обеспечивать возможность введение исходных данных и управляющих команд с помощью клавиатуры и мыши.
- ПП должен удовлетворять параметрам и техническим требованиям, предъявляемым к программным средствам, разработанным для работы на персональных ЭВМ типа IBM PC, под управлением операционной системы семейства Widows.
- ПП должен обеспечивать точность и стабильность вычислений.
- ПП должен обеспечивать вывод графических и табличных результатов работы на экран.
Требования к информативной и программной совместимости
Разрабатываемое программное обеспечение может быть реализовано на ЭВМ типа IBM PC, с установленным программным обеспечением:
- операционная система Windows;
- среда визуального программирования C++ Builder;
- пакет для инженерных расчетов Matlab.
Требования к технической документации
По окончании разработки должна быть представлена в одном экземпляре пояснительная записка к дипломному проекту, содержащая следующие разделы:
- техническое задание;
- пояснительная записка к техническому заданию;
- результаты проведенных исследований;
- описание программной модели;
- текст программной модели;
- расчёт экономической эффективности;
- рекомендации по охране окружающей среды;
- раздел гражданской обороны;
- графический материал, содержащий схему работы программы.
Порядок приёмки разработки
Результаты разработки проверяются руководителем проекта и нормоконтролером, качество выполнения работы оцениваются руководителем и рецензентом дипломного проекта.
Приёмка разработки осуществляется государственной экзаменационной комиссией по специальности «системы управления и автоматика», порядок работы которой определяется ректором СевНТУ.
4 Календарный план
| № | Стадии разработки | Этапы разработки | Начало разработки | Конец разработки |
| 1 | Исследовательские работы | Анализ предметной области и обоснование необходимости разработки | 01.02.2005 | 14.02.2005 |
| 2 | Работа над проектом | Разработка структуры проекта, концепции и логической структуры | 14.02.2005 | 07.03.2005 |
| 3 | – “ – | Разработка методического обеспечения | 07.03.2005 | 21.03.2005 |
| 4 | – “ – | Разработка алгоритмического и программного обеспечения | 21.03.2005 | 18.04.2005 |
| 5 | – “ – | Тестирование и отладка ПО | 18.04.2005 | 09.05.2005 |
| 6 | – “ – | Разработка разделов проекта, связанных с экономическим обоснованием разработки, гражданской обороной и охраной труда | 09.05.2005 | 23.05.2005 |
| 7 | – “ – | Оформление и подготовка проекта к защите | 23.05.2005 | 06.06.2005 |
Содержание
Введение
1. Постановка задачи
1.1 Функциональные требования к системе
1.2 Требования к программному обеспечению
1.3 Требования к ЭВМ
1.4 Требования к экспериментальной модели
2. Обзор методов дистанционного управления
2.1 Роль дистанционно управляемых систем
2.2 Основные методы и уровни дистанционного управления манипуляционными роботами
2.3 Командное управление манипуляторами и роботами на исполнительном уровне
2.4 Дистанционно-автоматическое управление манипуляционными роботами
3. Методы поиска терминального управления
3.1 Вариационная постановка задачи
3.2 Чисто терминальная постановка задачи
3.3 Синтез терминального управления, реализующего заданное движение системы
4. Концепция распределенной системы терминального управления робототехническим комплексом
4.1 Общая концепция РСТУ робототехническим комплексом
4.2 Концепция системы передачи управляющих команд
4.3 Концепция специализированного ПО РСТУ
5. Разработка экспериментальной модели РСТУ робототехнического комплекса
5.1 Назначение экспериментальной модели РСТУ
5.2 Построение экспериментальной модели
5.3 Численное моделирование и анализ исполнительной системы робота манипулятора
6. Разработка программного обеспечения системы терминального управления техническим объектом
6.1 Выбор среды разработки
6.2 Функциональные возможности ПО РСТУ
6.3 Требования к персональной ЭВМ
6.4 Руководство пользователя
6.5 Описание основных функций
7. Технико-экономическое обоснование дипломного проекта
7.1 Маркетинговые исследования проектируемого продукта
7.7.1 Потребительская ценность продукта
7.1.2 Портрет потребителя
7.1.3 Сегментация рынка
7.1.4 Оценка рыночной направленности
7.1.5 Конкурентоспособность программного продукта
7.2 Определение затрат на проектирование программного продукта
7.2.1 Расчёт трудоёмкости
7.2.2 Расчёт себестоимости часа машинного времени
7.2.3 Расчёт сметы затрат на проектирование
7.3 Формирование цены предложения
7.4 Расчёт капитальных затрат
7.5 Расчёт эксплуатационных расходов потребителя
7.6 Оценка эффективности проектируемого программного продукта.
7.6.1 Определение показателей чистого денежного потока
7.6.2 Определение показателей чистой текущей стоимости
7.7 Вывод
8. Охрана труда и окружающей среды
8.1 Анализ условий труда оператора ЭВМ в компьютерной лаборатории
8.2 Расчётная часть
8.2.1 Проектирование естественного освещения производственных помещений
8.2.2 Проектирование искусственного освещения производственных помещений
8.3 Вывод
Заключение
Библиографический список
Приложение А. Исходные тексты основных функций
Введение
Распределенные системы автоматического управления находят самое широкое применение во многих областях деятельности человека. В том числе это относится и к системам, в состав которых входят дистанционно управляемые роботы и манипуляторы, относящиеся к классу манипуляционных робототехнических систем. Бурное развитие промышленной робототехники, основной базой которой стали автоматически действующие манипуляционные роботы с программным управлением, позволило подойти к решению одной из наиболее актуальных задач – исключения ручного труда человека из сферы производства. При этом не только обеспечивается повышение производительности за счет интенсификации технологических процессов, но и существенно улучшается качество проводимых работ, повышается надежность выполнения операций [1].
Все это свидетельствует об актуальности разработок, связанных с использованием методов построения распределенных систем управления. В первую очередь это касается систем функционирующих в недетерминированных условиях экстремальных сред, где необходимо выполнять сложные операции исследовательского характера, проводить монтажно-сборочные работы с использованием универсального инструмента или оснастки. К таким средам в первую очередь относятся зоны с наличием радиоактивных излучений, опасных для здоровья человека. Подводно-технические работы, осуществляемые на больших глубинах, также рациональнее проводить с помощью манипуляционных роботов с дистанционно-автоматическим управлением.
Принципы дистанционно-автоматического управления представляются весьма перспективными при создании манипуляционных роботов, обслуживающих атомные электростанции и, в будущем, термоядерные энергетические установки. Большие возможности открывает использование манипуляционных роботов с дистанционно-автоматическим управлением в горнодобывающей и нефтеперерабатывающей промышленности.
Как было сказано выше, системы дистанционного управления в первую очередь ориентированны на работу в экстремальных условиях, что накладывает дополнительные требования к повышению точности работы сложных робототехнических устройств. Повысить точность управления можно за счет использования принципов терминального управления [2]. При таком управлении объект управления переходит из начального фазового состояния в предписанное конечное за заданный промежуток времени. Алгоритмы терминального управления получили весьма широкое распространение ввиду простой реализации с помощью ЭВМ. Это позволяет использовать в составе распределенной системы терминального управления микропроцессорную технику, что в свою очередь позволит миниатюризировать достаточно сложные технические решения.
Данный проект ставит своей целью разработку концепции и программного обеспечения для распределенной системы терминального управления техническим объектом, в роли которого выступает робототехнический комплекс. Такая система может быть эффективно использована при решении задач, связанных с построением систем автоматического управления, функционирующих в экстремальных условиях.
В первом разделе выполняется постановка задачи на дипломное проектирование. Во втором разделе дается обзор существующих методов построения дистанционно управляемых систем автоматического управления. В третьем разделе описывает основные принципы, использующиеся при синтезе терминальных управлений. Четвертый раздел описывает концепцию распределенной системы терминального управления, разрабатываемой в проекте. Пятый раздел связан с экспериментальной моделью проектируемой системы. Шестой раздел посвящен разработке программного обеспечения для распределенной системы терминального управления. Седьмой раздел связан с технико-экономическим обоснованием дипломного проекта. Восьмой раздел посвящен вопросам охраны труда и окружающей среды. Общие вопросы гражданской обороны освещены в девятом разделе.
Постановка задачи
В рамках дипломного проекта необходимо разработать концепцию и программное обеспечение распределенной системы терминального управления техническим объектом. В качестве технического объекта необходимо рассматривать робототехнический комплекс.
1.1 Функциональные требования к системе
Разрабатываемая система терминального управления (РСТУ) техническим объектом должна быть адаптирована к функционированию в экстремальных условиях, т.е. условиях, в которых существует угроза жизни и здоровью человека. Система не должна быть полностью автоматической, в ее составе должна быть отведена роль для оператора – лица, принимающего решения и выполняющего установку необходимых параметров для функционирования системы, а также задающего команды исполнительным частям системы. Поскольку условия, в которых работает разрабатываемая система предполагает наличие экстремальных условий работы, необходимо построить распределенную систему терминального управления. В этом случае оператор, осуществляющий контроль и управление системой, и объект управления (робототехническая система), находятся на значительном удалении друг от друга, достаточном для обеспечения безопасности оператора. При формировании закона терминального управления возможно использование информации об окружающей обстановке от распределенных в пространстве датчиков, поэтому необходимо предусмотреть возможность оперативного обновления и поступления информации от измерительных систем датчиков на пульт управления оператору РСТУ.
Контроль и управление должны осуществляться с помощью специализированного программного обеспечения. Пересылка команд объекту управления может быть осуществлена с использованием сетевых технологий. Разрабатываемая система должна отвечать повышенным требованиям к надежности функционирования всех отдельных частей системы, поэтому рекомендуется рассмотреть возможность подключения резервных элементов, наиболее важных для обеспечения работоспособности системы.
Требования к программному обеспечению
Программное обеспечение (ПО) для РСТУ должно быть ориентировано на работу под управлением операционной системы семейства Windows NT. Использование операционной системы семейства NT позволит повысить отказоустойчивость ПО. Разрабатываемое ПО должно обладать графическим интерфейсом пользователя, обеспечивающим интуитивно понятную работу оператора РСТУ с программой управления системой. Для представления результатов работы необходимо предусмотреть возможность отображения экспериментальных данных в виде таблиц и графических зависимостей. Для анализа аварийных и чрезвычайных ситуаций необходимо предусмотреть возможность протоколирования работы программы управления РСТУ.
При разработке следует использовать модульный подход к разработке программного обеспечения. Это позволит обеспечить возможность адаптации ПО к различным техническим объектам. В соответствии с функциональной спецификой РСТУ, разрабатываемое ПО должно поддерживать возможность обмена данными по локальным (или глобальным) сетям с использованием протокола TCP/IP.
Требования к ЭВМ
Разрабатываемое ПО пульта управления РСТУ должно быть ориентировано на работу на IBM PC совместимых персональных компьютерах. Минимальная конфигурация должна отвечать следующим условиям:
- процессор класса Intel Pentium/Celeron с тактовой частотой не менее 1 ГГц;
- объем оперативной памяти не менее 256 Мб;
- объем жесткого диска не менее 20 Гб;
- объем видеопамяти не менее 32 Мб;
- наличие сетевой платы, обеспечивающей пропускную способность 100 Мбит в секунду.
Персональная ЭВМ должна быть подключена к источнику бесперебойного питания.
Требования к экспериментальной модели
Для апробации алгоритмов управления рекомендуется создать имитационную модель, позволяющую промоделировать реакцию робототехнической системы на поданное терминальное управление. Использование экспериментальной имитационной модели позволит сэкономить значительные средства, необходимые для проведения натурных испытаний. Для построения такой модели рекомендуется использовать среду инженерных расчетов и моделирования Matlab. Разработанная модель может быть использована для исследовательских целей. При разработке модели, также как и при разработке программного обеспечение следует использовать модульный подход.
Выбор среды разработки
Язык программирования, на котором будет реализовываться специализированное ПО пульта управления РСТУ должен отвечать следующим требованиям [14, 15]:
- давать возможность работать с массивами данных;
- выполнять различные математические функции;
- возможность визуализации расчетных данных
- давать достаточно простой способ для создания приложений под Windows.
Поэтому в качестве языкового средства выбираем продукт фирмы Borland язык программирования высокого уровня Borland C++, который является одной из самых популярных систем разработки математического обеспечения. Система предоставляет в распоряжение программиста высокопродуктивные средства разработки 16- и 32-разрядных приложений для операционных систем Windows 95/98, Windows NT и DOS. Модифицированные библиотеки Object Windows Library (OWL) и Microsoft Foundation Classes (MFC), а также инструменты Visual Database Tools (VDBT) для визуальной разработки эффективных приложений баз данных выводят Borland C++ на новый качественный уровень систем объектно-ориентированного программирования.
При создании приложения для Windows на языке C++, значительное количество времени приходится уделять созданию пользовательского интерфейса, что затрудняет работу и мешает решению основной математической задачи. Чтобы устранить этот недостаток, в качестве среды программирования предлагается использовать систему визуальной разработки приложений Rapid Application Development (RAD) C++ Builder.
Данный продукт вышел на рынок в 1997 году и уже успел завоевать огромную популярность среди программистов. Перечислим наиболее важные достоинства С++ Builder [15]:
- система имеет удобную визуальную среду, которая обеспечивает разработку приложений из компонентов и поддерживает двунаправленное проектирование (изменения, сделанные в визуальной среде, отражаются на исходном коде программы, а изменение кода отражается в визуальной среде);
- в состав системы входит библиотека визуальных компонентов – Visual Component Library (VCL), ставшую стандартом при создании Windows приложений; существует возможность расширения этой библиотеки компонентами, разрабатываемыми программистом, а также готовыми ActiveX-компонентами сторонних разработчиков;
- С++ Builder содержит в своей основе мощный объектно-ориентированный язык C++, обогащенный новыми синтаксическими конструкциями и понятиями;
- быстрый и надежный компилятор позволяет получать максимально оптимизированные программы;
- интегрированный отладчик с возможностью трассировки программы на уровне машинных команд дает возможность быстро находить ошибки в тексте программы;
- поддержка работы с базами данных, поддерживающих архитектуру клиент-сервер.
Перечисленные выше возможности среды дают основание полагать, что C++ Builder может быть эффективно использован при создании программного обеспечения для РСТУ робототехническим комплексом.
Требования к персональной ЭВМ
Для оптимальной работы разрабатываемого программного обеспечения к ПЭВМ предъявляются следующие требования:
- процессор класса Intel Pentium/Celeron с тактовой частотой не менее 1 ГГц;
- объем оперативной памяти не менее 256 Мб;
- объем жесткого диска не менее 20 Гб;
- объем видеопамяти не менее 32 Мб;
- наличие сетевой платы, обеспечивающей пропускную способность 100 Мбит в секунду.
Для возможности модифицирования программы необходимо наличие установленной системы визуального программирования Borland C++ Builder 6.0.
Руководство пользователя
Программное обеспечение РСТУ представляет собой исполняемый файл RSTUPult.exe. Компиляция программы осуществлена таким образом, что для нормальной работы программы не требуется никаких дополнительных библиотек, достаточно стандартного набора библиотечных функций, входящий в стандартную поставку операционной системы Windows. После запуска программы на выполнение, открывается главное окно приложения, внешний вид которого представлен на рисунке 6.1.
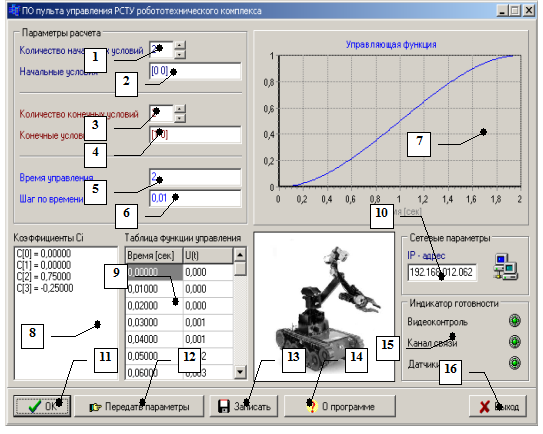
Рисунок 6.1 – Главное окно приложения RSTUPult
Далее описывается элементов управления, расположенных на главной форме приложения.
1 – Инкрементное поле для ввода количества начальных условий.
2 – Поле для ввода начальных условий.
3 – Инкрементное поле для ввода количества конечных условий.
4 – Поле для ввода конечных условий.
5 – Поле ввода времени, за которое объект управления должен перейти из заданного начального в заданное конечное положение.
6 – Поле ввода шага по оси времени для расчета управляющей функции.
7 – Поле для графического представления управляющей функции.
8 – Поле списка с значением коэффициентов терминального управления.
9 – Поле для табличного представления интегральной функции.
10 – Поле ввода IP-адреса получателя информационной посылки.
11 – Кнопка ввода исходных параметров для синтеза управления, расчета терминальных коэффициентов, заполнения таблиц данными.
12 – Кнопка формирования и передачи информационного пакета по заданному IP адресу.
13 – Кнопка формирования и записи файла протокола.
14 – Кнопка вывода вспомогательной информации о создателях программы.
15 – Индикатор готовности подсистем мониторинга и передачи информации.
16 – Кнопка закрытия программы.
Первое, что необходимо сделать оператору РСТУ, это ввести все необходимые параметры для расчета коэффициентов терминального управления. Необходимо следить за тем, чтобы введенное число параметров соответствовало их действительному наличию в поле ввода. В противном случае программа генерирует сообщение об ошибке и просит повторить ввод информации. Также необходимо задать время переход из одного граничного состояния в другое и шаг по временной шкале, для построения управляющей функции. После того как введены указанные выше параметры, можно осуществить нажатие на кнопку Ок. После этого происходит вызов соответствующих функций и вывод расчетных значений пользователю. Рассчитанные коэффициенты терминального управления должны быть переданы в микропроцессорную систему робота манипулятора. Это осуществляется нажатием на кнопку «Передать параметры». Однако при этом следует иметь в виду, что поле «IP-адрес» главного окна приложения должно содержать адрес робота манипулятора, а ПЭВМ пульта управления подключено к сети. В противном случае будет сгенерировано окно сообщения вида
Рисунок 6.2 – Окно сообщения об ошибке
Если окно, изображенное на рисунке 6.2 не появилось, значит, пакет успешно доставлен на борт робота. Вся расчетная информация может быть записана в файл протокола, по желанию пользователя. Для этого нужно нажать на кнопку «Записать». Пользователю будет предложено ввести имя файла, в который будет записан протокол команд. После ввода имени файла протокола программа автоматически генерирует протокол и записывает его в файл. Пример файла протокола приведен ниже:
Файл протокола от 05.06.2005
C[0] = C[0] = 0,00000
C[1] = C[1] = 0,00000
C[2] = C[2] = 0,75000
C[3] = C[3] = -0,25000
Время [сек] U(t)
0,00000 0,000
0,01000 0,000
0,02000 0,000
0,03000 0,001
0,04000 0,001
0,05000 0,002
0,06000 0,003
0,07000 0,004
0,08000 0,005
0,09000 0,006
0,10000 0,007
0,11000 0,009
0,12000 0,010
0,13000 0,012
0,14000 0,014
0,15000 0,016
Рисунок 6.3 – Диалоговое окно ввода имени файла протокола
Для вывода информации о разработчика данного программного обеспечения необходимо нажать кнопку «О программе». В результате появляется окно с краткой информацией об авторах.
Рисунок 6.4 – Диалоговое окно информации о программе
Описание основных функций
Схема алгоритмов, описывающих поведения каждой из приведенных ниже функций, приведены на чертежах. Исходные тексты функций представлены в приложении А
void __fastcall TForm1::bOkClick(TObject *Sender) – Функция-обработчик нажатия на кнопку Ок.
void __fastcall TForm1::FormCreate(TObject *Sender) – Функция инициализирующая вспомогательные параметры при создании приложения.
void __fastcall TForm1::bbSaveClick(TObject *Sender) – Функция-обработчик нажатия на кнопку «Сохранить».
void __fastcall TForm1::bbSendClick(TObject *Sender) – Функция-обработчик нажатия на кнопку «Передать параметры».
double Factorial(int n) – Функция вычисления факториала. Входной парамет n – порядок факториала. Выходное значение – n!
double *CoeffC(double Xo[], int r, double Xk[], int n, double Tk) – Функция расчета коэффициентов терминального управления. Входные параметры: Xo – указатель на вещественный массив начальных условий, r – количество начальных условий, Xk – указатель на вещественный массив конечных условий, n – количество конечных условий, Tk – значение времени опережения. Выходной параметр функции – указатель на массив коэффициентов терминального управления.
Портрет потребителя
Предпочтительным потребителем ПП является специализированный отдел предприятия, занимающийся научными исследованиями, разработками. Предприятие платежеспособное, требующее уникальную продукцию. Основной выдвигаемый критерий – сервис, т.е. сроки создания и поставки, эффективность программы, качество и надёжность. Вид распределения – прямой маркетинг (работа с заказчиком ведётся без посредников). Условия поставки – оплата в гривнах.
Сегментация рынка
Сегментация рынка - разбивка рынка на четкие группы покупателей, для каждой из которых могут потребоваться отдельные товары и/или комплексы маркетинга [13]. Предприятие определяет разные способы сегментирования рынка, составляет профили полученных сегментов и оценивает степень привлекательности каждого из них.
Проведем сегментирование рынка по степени использования ПП предприятиями различных видов: коммерческие фирмы (35 %); рядовые пользователи (22 %); государственные учреждения (43 %). Эта сегментация приведена на рисунке 7.1.
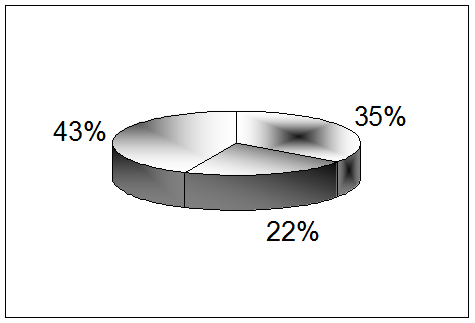
Рисунок 7.1- Сегментирование рынка по степени использования ПП предприятиями различных видов
На рисунке 7.1 приняты следующие обозначения:
35%- коммерческие фирмы;
43%- государственные учреждения;
22%- рядовые пользователи.
По географическому признаку сегмент рынка составит 50-60%.
Конкурентоспособность ПП
Данный ПП не является уникальным, и разработан для решения конкретной задачи – программное обеспечение терминального управления робототехническим комплексом. Поэтому ПП имеет конкурентов, и с увеличением осведомленности – число конкурентов будет расти.
Расчет трудоемкости
Трудоемкость проекта определяется, исходя из данных об используемых функциях к ПС ВТ [13]. Первоначально определяется тип (см. таблицу 7.2) и функции ПС ВТ (таблицу 7.3).
Общий объем разрабатываемых ПС ВТ определяется по формуле (7.1).
 , [УМК] (7.1)
, [УМК] (7.1)
где N – общее число функций ПС ВТ;
 - объем функций ПС ВТ.
- объем функций ПС ВТ.
Таблица 7.2 - Тип ПС ВТ
| Код типа ПС ВТ | Наименование типа ПС ВТ | Состав и содержание типа ВТ |
| 2.0 | ПС технологии и автоматизации программирования и проектирования АСУ | ПС автоматизации проектирования (для автоматизации проектирования различных АСУ). ПС технологии программирования. ПС автоматизации программирования. |
Таблица 7.3 - Функции программных средств вычислительной техники
| N функции |
Наименование (содержание) функций | Объем функ. |
| СМ ЭВМ | ||
| 101 102 107 108 109 111 305 306 505 604 703 705 | Организация ввода информации Контроль Синтаксический и семантический анализ входного языка и генерация кодов команд Процессор языка Организация ввода/вывода информации в интерактивном режиме Управление вводом/выводом Обработка файлов Обработка файлов в диалоговом режиме Управление внешней памятью Справки и обучение Расчет показателей Формирование вывода на внешние носители | 870 2100 6800 3260 1550 6450 2420 5130 - 450 7410 6200 |
 [УМК].
[УМК].
Затраты труда Тр на разработку ПС ВТ в зависимости от объема (  ) определяются по нормам времени.
) определяются по нормам времени.
Нормы времени на разработку ПС ВТ берутся в зависимости от уточненного объема ПС ВТ (V) и группы сложности ПС ВТ в человеко-днях.
 [чел-дни].
[чел-дни].
Общая трудоемкость  для соответствующей группы сложности ПС ВТ с учетом поправочного коэффициента сложности ПС ВТ Ксл для данной группы рассчитывается по формуле:
для соответствующей группы сложности ПС ВТ с учетом поправочного коэффициента сложности ПС ВТ Ксл для данной группы рассчитывается по формуле:
 , [чел-дней]. (7.2)
, [чел-дней]. (7.2)
где коэффициент сложности ПС ВТ Ксл рассчитывается по формуле:
 , (7.3)
, (7.3)
где k1 - коэффициент, учитывающий уровень повышения сложности по дополнительным характеристикам ПС ВТ. k1=0.18 (коэффициент, учитывающий уровень повышения сложности ПС ВТ, обладающей оптимизационными расчетами, обеспечением настройки ПС ВТ на изменение структур входных и выходных данных, реализации особо сложных инженерных и научных расчетов),
 ;
;
 [чел-дней].
[чел-дней].
Полученную общую трудоемкость То разработки ПС ВТ разбивают на соответствующие стадии разработки. Трудоемкость каждой стадии разработки ПС ВТ Ti определяют по формулам:
1) Трудоемкость стадии разработки технического задания
 ,[чел-дни] (7.4)
,[чел-дни] (7.4)
где удельный вес трудоемкости стадии разработки в общей трудоемкости - Lтз=0.09
поправочный коэффициент, учитывающий степень новизны ПС ВТ – Кн=0.8.
Т1=0.09*0.8*49.45=3.56 [чел-дней]
Трудоемкость стадии разработки экономического проекта
 , [чел-дни] (7.5)
, [чел-дни] (7.5)
где удельный вес трудоемкости стадии разработки в общей трудоемкости - Lэп=0.07,
поправочный коэффициент, учитывающий степень новизны ПС ВТ – Кн=0.8.
Т2=0.08*0.8*49.45=3.16 [чел-дни],
2) Трудоемкость стадии технического проекта
 ,[чел-дни] (7.6)
,[чел-дни] (7.6)
где удельный вес трудоемкости стадии разработки в общей трудоемкости - Lтп=0.07,
поправочный коэффициент, учитывающий степень новизны ПС ВТ – Кн=0.8.
Т3=0.08*0.8*49.45=3.16 [чел-дни]
4) Трудоемкость стадии рабочего проекта
 , (7.7)
, (7.7)
где удельный вес трудоемкости стадии разработки в общей трудоемкости - Lрп=0.61,
поправочный коэффициент, учитывающий степень новизны ПС ВТ – Кн=0.8
поправочный коэффициент, учитывающий степень использования в разработке типовых (стандартных) программ ПС ВТ – Кт=1.00.
Т4=0.58*0.8*49.45*1.00=22.94 [чел-дни]
5) Трудоемкость стадии внедрения
 [чел-дни] (7.8)
[чел-дни] (7.8)
где удельный вес трудоемкости стадии разработки в общей трудоемкости – Lвн=0.16;
поправочный коэффициент, учитывающий степень новизны ПС ВТ – Кн=0.8
Т5=0.16*0.8*49.45=6.33 [чел-дни]
Уточненная общая трудоемкость ПС ВТ Тобщ в человекоднях (при восьмичасовом рабочем дне) определяется по формуле:
Тобщ=  , [чел-дней] (7.9)
, [чел-дней] (7.9)
где Ti – трудоемкость разработки i – ой стадии.
N - число стадий разработки.
Тобщ=3.56+3.16+3.16+22.94+6.33=39.15 [чел-дней]
Исходя из трудоемкости Тобщ и численности исполнителей, рассчитываем срок разработки Ф:
 , [месяцев] (7.10)
, [месяцев] (7.10)
где Fр =23- фонд рабочего времени в месяц [дни];
Ч=1 – численность разработчиков [чел].
 =1.7 [месяцев]
=1.7 [месяцев]
Расчет капитальных затрат
Капитальные вложения представляют собой:
1) для разработчика Кр =0 [грн]
Нет необходимости учитывать стоимость технических средств, т.к. в настоящее время крупные и средние предприятия полностью укомплектованы всеми необходимыми средствами для разработки программных средств.
2) для пользователя
Основными капитальными затратами для пользователя являются расходы на покупку программного продукта – 392.08 гривен и расходы на установку программного продукта и на краткий курс обучения персонала - 20 (гривен).
Кп = 392.08 + 20 = 412.08 (гривен).
Затраты на средства необходимые для работы с данным программным продуктом можно не учитывать. В настоящее время предприятия, на которые ориентирован разработанный ПП полностью укомплектованы всеми необходимыми средствами для работы с выпущенной программой.
Вывод
При реализации данного ПП, с учетом рассчитанных выше экономических величин (цена, капитальные затраты, экономическая эффективность) возможно получение прибыли в размере 615.94 грн. по истечении пяти лет. Интегральный экономический эффект ПП составляет 615.94 грн., что делает его доступным для предприятий и организаций. С учетом того, что капитальные затраты составляют 412.08 грн., ПП окупается на третьем году.
Таким образом, проведенное маркетинговое исследование и расчеты показали, что разработка проекта «Проектирование ПО для терминального управления техническим объектом» целесообразна с экономической точки зрения.
Расчётная часть
Имея исходные данные, т.е. план комнаты (см. рисунок 8.1), произведем расчет и оценку естественного и искусственного освещения.

Рисунок 8.1 - Эскиз помещения рабочего места в лаборатории
1,2 - рабочие столы с оборудованием;
3,4 - стулья;
5 - дверной проем;
6 - шкаф;
7,8 - окна.
Размеры комнаты: 4 м ´ 4м.
Высота комнаты: 3 м.
Размеры окна: 2 м ´ 2 м.
Вредных факторов нет.
Характеристика зрительной работы – средняя точность.
Число светильников в помещении – 4 шт., число ламп в светильнике – 4 шт. (рис.8.2).

Рисунок 8.2 - Эскиз помещения рабочего места в лаборатории
1-4 - светильники;
5 - дверной проем;
6,7 - окна.
Вывод
Разработанное программное обеспечение должно эксплуатироваться на IBM PC/AT совместимых компьютерах в помещении, соответствующем санитарным нормам, а именно: площадью не менее 16 м2 и объёмом воздуха 15 м3. В производственном помещении в дневное время должно быть обеспечено достаточное естественное освещение, для чего необходимо расположить два окна размером 2х2 м2, а в темное время суток – искусственное освещение, в качестве источника света которого являются люминесцентные лампы (световой поток одной лампы составляет 536.2 Лм).
Заключение
В рамках дипломного проекта разработана концепция распределенной системы терминального управления робототехническим комплексом, оперирующем в зоне опасной для жизни человека. При разработке концепции использованы современные подходы к организации сбора и передачи информации. В частности рассмотрены основы использования CAN-интерфейса. Для определения коэффициентов терминального управления разработана функция вычисления коэффициентов на двух языках программирования (язык m-скриптов и на языке C++). Возможность применения синтезированного закона опробована на специально разработанной экспериментальной модели системы. Разработка модели и апробация проведены в среде инженерных расчетов Matlab. Конечным продуктом проекта является программное обеспечение пульта управления РСТУ, которое позволяет произвести вычисление коэффициентов терминального управления, построить управляющую функцию, произвести визуализацию результатов работы, создание и сохранение файла протокола, передачу расчетных данных на борт робота манипулятора по сетевому интерфейсу. При разработке учтены все требования технического задания.
Библиографический список
1. Дистанционно управляемые роботы и манипуляторы / ВС. Кулешов, Н.А Лакота, В.В. Андрюнин и др.; Под общ. Ред. Е.П. Попова. – М.Машиностроение, 1986. – 328 с. ил.
2. Батенко А.П. Системы терминального управления. – М.: Радио и связь, 1984. – 160 с., ил.
3. Медведев В.С., Лесков А.Г., Системы управления манипуляционных роботов/Под ред. Е.П. Попова. – М.: Наука, 1978 – 416 с.
4. Летов А.М. Динамика полета и управление. – М.: Наука, – 1969. – 359 с.
5. Красовский А.А. Аналитическое конструирование систем квазитерминального управления // Автоматика и телемеханика. – 1972. – №4. – С. 5-14.
6. Seal C.E., Stabberud A.R. On final value control // IEEE Trans. – 1969. – V.7 – №2. – P. 133-143.
7. Green W.G. Logarithmic navigation for precise guidance for space vehicles // IRE Trans. – 1961. – V. ANE-8 – №2 – P. 59-71.
8. Ястребов В.С., Филатов А.М. Системы управления движением робота. – М.: Машиностроение, 179. 176 с.
9. Батенко А.П. Управление конечным состоянием движущихся объектов. – М.: Сов. радио, 1977. – 256 с.
10. Батенко А.П. Конечное управление цепочкой интеграторов // Автоматика. – 1977. – №2. – С. 63-71.
11. http://www.kaskod.ru
12. http://www.mstu.edu.ru
13. Чиликин М.Г., Ключев В.И. Теория автоматизированного электропривода. – М.: Энергия, 1979. – 616 с.
14. Borland C++Builder. Программирование на С++ без проблем / Шамис В.А.. – М.: «Нолидж», 1997 – 266с., ил.
15. Программирование в среде С++Builder / Сурков К.А., Сурков Д.А., Вальвачев А.Н.. – Мн.: ООО «Попурри», 1998. – 576 с.:ил.
Приложение а
(Обязательное)
Исходные тексты основных функций
А.1 Исходный текст функции вычисления коэффициентов терминального управления на языке Matlab
% ФУНКЦИЯ РАСЧЕТА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ
% ----------------------------------------
% ВХОДНЫЕ ПАРАМЕТРЫ:
% Xo - ВЕКТОР НАЧАЛЬНЫХ УСЛОВИЙ
% Xk - ВЕКТОР КОНЕЧНЫХ УСЛОВИЙ
% T - ВРЕМЯ ЗА КОТОРОЕ НЕОБХОДИМО ВЫПОЛНИТЬ ПЕРЕХОД
% dT - ВРЕМЯ ОПЕРЕЖЕНИЯ ФАЗОВОЙ ТОЧКИ
% ----------------------------------------
% ВЫХОДНЫЕ ПАРАМЕТРЫ:
% C - КОЭФФИЦИЕНТЫ ПАРАМЕТРОВ УПРАВЛЕНИЯ
% ----------------------------------------
function [C]=terminal_control(Xo,Xk,T,dT)
r=length(Xo); % КОЛИЧЕСТВО НАЧАЛЬНЫХ УСЛОВИЙ
n=length(Xk); % КОЛИЧЕСТВО КОНЕЧНЫХ УСЛОВИЙ
C=zeros(1,2*r+n);
%---------------------------------------------------------------% РАСЧЕТ ПАРАМЕТРОВ УПРАВЛЕНИЯ Сi
%---------------------------------------------------------------for i=0:r-1
C(i+1)=Xo(i+1)/factorial(i); % ПЕРВЫЕ r ПАРАМЕТРОВ Ci (i=0,1,...,r-1)
end
for i=r:r+n-1
summa_1=0;
summa_2=0;
for nu=0:i-1
summa_1=summa_1+factorial(r+n-nu-1)*C(nu+1)/factorial(r+n-i-1)/factorial(i-nu)/T^(i-nu);
end
for nu=0:r+n-i-1
summa_2=summa_2+((-1)^nu)*factorial(r+n-nu-1)*Xk(nu+1)/factorial(i)/factorial(r+n-i-nu-1)/factorial(nu)/T^(i-nu);
end
C(i+1)=summa_2-summa_1;
end
disp(['---------- ВЫХОДНАЯ ФУНКЦИЯ ----------'])
disp(['X(t)='])
for i=0:r+n-1
disp(['C' num2str(i) '*t^' num2str(i) '+'])
end
disp(['---------- НАЧАЛЬНЫЕ УСЛОВИЯ Xo ----------'])
for i=0:r-1
disp(['Xo(' num2str(i) ')=' num2str(Xo(i+1))])
end
disp(['---------- КОНЕЧНЫЕ УСЛОВИЯ Xk ----------'])
for i=0:n-1
disp(['Xk(' num2str(i) ')=' num2str(Xk(i+1))])
end
disp(['---------- ВРЕМЯ ----------'])
disp(['T=' num2str(T)])
disp(['---------- dT ----------'])
disp(['dT=' num2str(dT)])
disp(['---------- КОЭФФИЦИЕНТЫ Ci ----------'])
for i=0:r+n-1
disp(['C(' num2str(i) ')=' num2str(C(i+1))])
end
А.2 Исходный текст модуля вычисления коэффициентов терминального управления на языке С++
// Функции для вычисления параметров
// терминального управления v.1.0
#include <math.h>
//----------------------------------//
// ФУНКЦИЯ ВЫЧИСЛЕНИЯ ФАКТОРИАЛА N! //
//----------------------------------//
double Factorial(int n)
{
double result=1;
int i=1;
// Если аргумент функции отрицательный возвращаем -1
if (n<0) return -1;
// Расчет факториала
while (i<=n)
{
result*=i;
i++;
}
// Возвращаем результат
return result;
}
//-------------------------------------//
// ФУНКЦИЯ ВЫЧИСЛЕНИЯ ПАРАМЕТРОВ Сi //
//-------------------------------------//
// Входные параметры:
// Xo - массив начальных условий
// r - количество начальных условий
// Xk - массив конечных условий
// n - количество конечных условий
// Tk - конечное время
// Выходные параметры:
// Указатель на массив коэффициентов Ci
//-------------------------------------//
double *CoeffC(double Xo[], int r, double Xk[], int n, double Tk)
{
// Определяем массив коэффициентов
// Памать под массив необходимо очистить
// вызывающей функции delete[] Ci !!!
double *Ci = new double[r+n];
// Вычисляем первые r коэффициентов Ci
for (int i=0; i<=r-1; i++)
{
Ci[i]=(double)(Xo[i]/Factorial(i));
}
// Вычисляем оставшиеся n коэффициентов Ci
// См. Батенко А.П. "Синтез терминального управления" формула (4.16)
int v;
double sum_1, sum_2;
sum_1=sum_2=0.0;
for (int i=r; i<=r+n-1; i++)
{
for (v=0; v<=i-1; v++)
{
sum_1+=(double)(Factorial(r+n-v-1)/Factorial(r+n-i-1)/Factorial(i-v)/pow(Tk,i-v)*Ci[v]);
}
for (v=0; v<=r+n-i-1; v++)
{
sum_2+=(double)(pow(-1,v)*Factorial(r+n-v-1)/Factorial(i)/Factorial(r+n-i-v-1)/Factorial(v)/pow(Tk,i-v)*Xk[v]);
}
Ci[i]=-sum_1+sum_2;
sum_1=sum_2=0.0;
}
r=(int)sizeof(Ci)/sizeof(double);
return Ci;
}
//-------------------------------------//
А.2 Исходный текст функций программного обеспечения РСТУ
//--------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
}
//--------------------------------------------------------------void __fastcall TForm1::bbCloseClick(TObject *Sender)
{
Close();
}
//--------------------------------------------------------------
void __fastcall TForm1::bOkClick(TObject *Sender)
{
Series1->Clear();
ListBox1->Clear();
int i, k;
String S, s;
//------------------------------------------------------------
// Ввод исходных данных для расчета
//------------------------------------------------------------ int InitConditionNum=StrToInt(Edit1->Text); // Кол-во начальных условий
int FiniConditionNum=StrToInt(Edit3->Text); // - " - конечных условий
String InitCondition=Edit2->Text;
String FiniCondition=Edit4->Text;
double T=StrToFloat(Edit5->Text);
//------------------------------------------------------------
// Формирование массива начальных условий
//------------------------------------------------------------
S=Edit2->Text;
s="";
k=0;
double *xo;
xo=new double[InitConditionNum];
for (i=1; i<=S.Length(); i++)
{
if ((S[i]!=' ')&(S[i]!='[')&(S[i]!=']'))
{
s+=S[i];
}
else
{
if (!s.IsEmpty())
{
xo[k]=StrToFloat(s);
s="";
k++;
}
}
}
//------------------------------------------------------------
// Формирование массива конечных условий
//------------------------------------------------------------
S=Edit4->Text;
s="";
k=0;
double *xf;
xf=new double[FiniConditionNum];
for (i=1; i<=S.Length(); i++)
{
if ((S[i]!=' ')&(S[i]!='[')&(S[i]!=']'))
{
s+=S[i];
}
else
{
if (!s.IsEmpty())
{
xf[k]=StrToFloat(s);
s="";
k++;
}
}
}
//------------------------------------------------------------
// Вычисляем коэффициенты терминального управления
//------------------------------------------------------------
// Указатель на массив коэффициентов
double *C;
C=CoeffC(xo, InitConditionNum, xf, FiniConditionNum, T);
for (i=0; i<InitConditionNum+FiniConditionNum; i++)
{
ListBox1->Items->Add("C["+IntToStr(i)+"] = "
+FloatToStrF(C[i], ffFixed, 7, 5));
}
//------------------------------------------------------------
// Вычисляем управляющую функцию u(t)
//------------------------------------------------------------
double dT, t=0.0;
dT=StrToFloat(Edit6->Text);
int N=(int)T/dT;
StringGrid1->RowCount=N+3;
double u, sum=0.0;
for(i=0; i<=N+1; i++)
{
StringGrid1->Cells[0][i+1]=FloatToStrF(t, ffFixed, 7, 5);
for (k=0; k<InitConditionNum+FiniConditionNum; k++)
{
if (k==0)
{
sum+=C[k];
}
else
{
sum+=C[k]*pow(t, k);
}
}
Series1->AddXY(t, sum, "", clTeeColor);
Application->ProcessMessages();
StringGrid1->Cells[1][i+1]=FloatToStrF(sum, ffFixed, 5, 3);
sum=0.0;
t+=dT;
}
//------------------------------------------------------------
delete[] C;
delete[] xo;
delete[] xf;
}
//--------------------------------------------------------------
void __fastcall TForm1::FormCreate(TObject *Sender)
{
StringGrid1->Cells[0][0]="Время [сек]";
StringGrid1->Cells[1][0]="U(t)";
}
//--------------------------------------------------------------
void __fastcall TForm1::bbSaveClick(TObject *Sender)
{
ofstream out;
int i;
if (SaveDialog1->Execute())
{
out.open(SaveDialog1->FileName.c_str(), 0);
out<<"Файл протокола от "<<DateToStr(Now()).c_str()<<"\n";
for (i=0; i<ListBox1->Count; i++)
{
out<<"C["<<i<<"] = "<<ListBox1->Items->Strings[i].c_str()<<"\n";
}
for (i=0; i<StringGrid1->RowCount; i++)
{
out<<StringGrid1->Cells[0][i].c_str()<<"\t"<<StringGrid1->Cells[1][i].c_str()<<"\n";
}
out.close();
}
}
//--------------------------------------------------------------
void __fastcall TForm1::bbSendClick(TObject *Sender)
{
String S="@";
int i;
//------------------------------------------------------------
// Формируем пакет для передачи информации
//------------------------------------------------------------
for (i=0; i<ListBox1->Count; i++)
{
S+=ListBox1->Items->Strings[i]+"%";
}
S+="#";
//------------------------------------------------------------
// Вводим IP-адрес
//------------------------------------------------------------
UDP->Host=MaskEdit1->Text;
//------------------------------------------------------------
// Пересылка данных
//------------------------------------------------------------
try
{
UDP->Send(S);
}
catch(...)
{
ShowMessage("Не удалось передать информационный пакет!");
}
//------------------------------------------------------------
}
//--------------------------------------------------------------
void __fastcall TForm1::bbAboutClick(TObject *Sender)
{
FormAbout->ShowModal();
}
//--------------------------------------------------------------
Пояснительная
Записка
к ________________дипломному проекту_________________________
(дипломному проекту (работе); выпускной работе бакалавра, магистра)
на тему: __«Распределенная система терминального управления техническим объектом»
студент группы Зиновьев Константин Игоревич_________
(фамилия, имя, отчество)
Направление подготовки (специальность) _____7.091401 – системы управления и автоматики
Руководитель Альчаков В.В., ассистент кафедры ТК
(фамилия, инициалы, должность)
Консультанты _______ ( _______ )
___________________ ( ________ )
___________________ ( _______ )
______ ________ (________ )
Зав. кафедрой __________ (Краснодубец Л.А.)
Г.
Министерство образования и науки Украины
Севастопольский национальный технический университет
«Согласованно»
руководитель дипломного проекта
________________ (В.В. Альчаков)
«Утверждаю»
заведующий кафедрой ТК
______________ (Л.А. Краснодубец)
Техническое задание
К дипломному проекту
«Распределенная система терминального управления техническим объектом»
Исполнитель:
ст. гр. А-61з
_________________ (Зиновьев К.И.)
« ___ » ________________ 2005 г.
Нормоконтролер:
_________________ (Шушляпин Е.А.)
« ___ » ________________ 2005 г.
2005
Основание для разработки
Основанием для разработки дипломного проекта на тему «Распределенная система терминального управления техническим объектом» служит приказ ректора № 124п от 30.03.2005.
Назначение разработки
Разрабатываемая система предназначена для построения компьютерной программы управления распределенной системой терминального управления сложными техническими объектами, функционирующими в условиях, опасных для жизни человека.
3 Технические требования
Требования к условиям эксплуатации
Разработанная система должна эксплуатироваться на IBM совместимых компьютерах в помещении, соответствующем санитарным нормам, а, именно: площадью на одного человека не менее 4,5 м2 и объёмом воздуха 15 м3. В помещении должны поддерживаться следующие метеорологические условия:
- в холодный период температура воздуха 20° – 30° С, относительная влажность 40 – 60%;
- в теплый период температура воздуха 22° – 25° С, относительная влажность 40 – 60%.
Требования к составу и параметрам технических средств
Для эффективной работы программы необходим персональный компьютер типа IBM PC со следующими параметрами:
- процессор семейства Intel Pentium (Celeron)/AMD с тактовой частотой не менее 500 КГц;
- оперативная память (128 Mb);
- видеопамять (32 Мб)
- операционная система Windows 98/NT/2000/Me/XP;
- накопитель на жестком магнитном диске (20 Гб);
- принтер (при необходимости вывода информации на печать);
- монитор SVGA;
- манипулятор типа «мышь».
Требования упаковке и хранению
Программное обеспечение распределенной системы терминального управления распространяется в виде отдельного исполнительного файла, для хранения которого на жестком диске персонального компьютера отводится отдельная директория. Для поставки заказчику, могут использоваться любые накопители (лазерные диски, flash-диски). Ввиду достаточно большого объема исполнительного файла не рекомендуется использовать гибкие магнитные диски.
Требования к программному обеспечению (ПО)
Требования, предъявляемые к разрабатываемому программному продукту (ПП) заключаются в следующем:
- ПП должен функционировать под управлением операционной системы семейства MS Windows.
- ПП должен обеспечивать возможность введение исходных данных и управляющих команд с помощью клавиатуры и мыши.
- ПП должен удовлетворять параметрам и техническим требованиям, предъявляемым к программным средствам, разработанным для работы на персональных ЭВМ типа IBM PC, под управлением операционной системы семейства Widows.
- ПП должен обеспечивать точность и стабильность вычислений.
- ПП должен обеспечивать вывод графических и табличных результатов работы на экран.
Требования к информативной и программной совместимости
Разрабатываемое программное обеспечение может быть реализовано на ЭВМ типа IBM PC, с установленным программным обеспечением:
- операционная система Windows;
- среда визуального программирования C++ Builder;
- пакет для инженерных расчетов Matlab.
Требования к технической документации
По окончании разработки должна быть представлена в одном экземпляре пояснительная записка к дипломному проекту, содержащая следующие разделы:
- техническое задание;
- пояснительная записка к техническому заданию;
- результаты проведенных исследований;
- описание программной модели;
- текст программной модели;
- расчёт экономической эффективности;
- рекомендации по охране окружающей среды;
- раздел гражданской обороны;
- графический материал, содержащий схему работы программы.
Порядок приёмки разработки
Результаты разработки проверяются руководителем проекта и нормоконтролером, качество выполнения работы оцениваются руководителем и рецензентом дипломного проекта.
Приёмка разработки осуществляется государственной экзаменационной комиссией по специальности «системы управления и автоматика», порядок работы которой определяется ректором СевНТУ.
4 Календарный план
| № | Стадии разработки | Этапы разработки | Начало разработки | Конец разработки |
| 1 | Исследовательские работы | Анализ предметной области и обоснование необходимости разработки | 01.02.2005 | 14.02.2005 |
| 2 | Работа над проектом | Разработка структуры проекта, концепции и логической структуры | 14.02.2005 | 07.03.2005 |
| 3 | – “ – | Разработка методического обеспечения | 07.03.2005 | 21.03.2005 |
| 4 | – “ – | Разработка алгоритмического и программного обеспечения | 21.03.2005 | 18.04.2005 |
| 5 | – “ – | Тестирование и отладка ПО | 18.04.2005 | 09.05.2005 |
| 6 | – “ – | Разработка разделов проекта, связанных с экономическим обоснованием разработки, гражданской обороной и охраной труда | 09.05.2005 | 23.05.2005 |
| 7 | – “ – | Оформление и подготовка проекта к защите | 23.05.2005 | 06.06.2005 |
Содержание
Введение
1. Постановка задачи
1.1 Функциональные требования к системе
1.2 Требования к программному обеспечению
1.3 Требования к ЭВМ
1.4 Требования к экспериментальной модели
2. Обзор методов дистанционного управления
2.1 Роль дистанционно управляемых систем
2.2 Основные методы и уровни дистанционного управления манипуляционными роботами
2.3 Командное управление манипуляторами и роботами на исполнительном уровне
2.4 Дистанционно-автоматическое управление манипуляционными роботами
3. Методы поиска терминального управления
3.1 Вариационная постановка задачи
3.2 Чисто терминальная постановка задачи
3.3 Синтез терминального управления, реализующего заданное движение системы
4. Концепция распределенной системы терминального управления робототехническим комплексом
4.1 Общая концепция РСТУ робототехническим комплексом
4.2 Концепция системы передачи управляющих команд
4.3 Концепция специализированного ПО РСТУ
5. Разработка экспериментальной модели РСТУ робототехнического комплекса
5.1 Назначение экспериментальной модели РСТУ
5.2 Построение экспериментальной модели
5.3 Численное моделирование и анализ исполнительной системы робота манипулятора
6. Разработка программного обеспечения системы терминального управления техническим объектом
6.1 Выбор среды разработки
6.2 Функциональные возможности ПО РСТУ
6.3 Требования к персональной ЭВМ
6.4 Руководство пользователя
6.5 Описание основных функций
7. Технико-экономическое обоснование дипломного проекта
7.1 Маркетинговые исследования проектируемого продукта
7.7.1 Потребительская ценность продукта
7.1.2 Портрет потребителя
7.1.3 Сегментация рынка
7.1.4 Оценка рыночной направленности
7.1.5 Конкурентоспособность программного продукта
7.2 Определение затрат на проектирование программного продукта
7.2.1 Расчёт трудоёмкости
7.2.2 Расчёт себестоимости часа машинного времени
7.2.3 Расчёт сметы затрат на проектирование
7.3 Формирование цены предложения
7.4 Расчёт капитальных затрат
7.5 Расчёт эксплуатационных расходов потребителя
7.6 Оценка эффективности проектируемого программного продукта.
7.6.1 Определение показателей чистого денежного потока
7.6.2 Определение показателей чистой текущей стоимости
7.7 Вывод
8. Охрана труда и окружающей среды
8.1 Анализ условий труда оператора ЭВМ в компьютерной лаборатории
8.2 Расчётная часть
8.2.1 Проектирование естественного освещения производственных помещений
8.2.2 Проектирование искусственного освещения производственных помещений
8.3 Вывод
Заключение
Библиографический список
Приложение А. Исходные тексты основных функций
Введение
Распределенные системы автоматического управления находят самое широкое применение во многих областях деятельности человека. В том числе это относится и к системам, в состав которых входят дистанционно управляемые роботы и манипуляторы, относящиеся к классу манипуляционных робототехнических систем. Бурное развитие промышленной робототехники, основной базой которой стали автоматически действующие манипуляционные роботы с программным управлением, позволило подойти к решению одной из наиболее актуальных задач – исключения ручного труда человека из сферы производства. При этом не только обеспечивается повышение производительности за счет интенсификации технологических процессов, но и существенно улучшается качество проводимых работ, повышается надежность выполнения операций [1].
Все это свидетельствует об актуальности разработок, связанных с использованием методов построения распределенных систем управления. В первую очередь это касается систем функционирующих в недетерминированных условиях экстремальных сред, где необходимо выполнять сложные операции исследовательского характера, проводить монтажно-сборочные работы с использованием универсального инструмента или оснастки. К таким средам в первую очередь относятся зоны с наличием радиоактивных излучений, опасных для здоровья человека. Подводно-технические работы, осуществляемые на больших глубинах, также рациональнее проводить с помощью манипуляционных роботов с дистанционно-автоматическим управлением.
Принципы дистанционно-автоматического управления представляются весьма перспективными при создании манипуляционных роботов, обслуживающих атомные электростанции и, в будущем, термоядерные энергетические установки. Большие возможности открывает использование манипуляционных роботов с дистанционно-автоматическим управлением в горнодобывающей и нефтеперерабатывающей промышленности.
Как было сказано выше, системы дистанционного управления в первую очередь ориентированны на работу в экстремальных условиях, что накладывает дополнительные требования к повышению точности работы сложных робототехнических устройств. Повысить точность управления можно за счет использования принципов терминального управления [2]. При таком управлении объект управления переходит из начального фазового состояния в предписанное конечное за заданный промежуток времени. Алгоритмы терминального управления получили весьма широкое распространение ввиду простой реализации с помощью ЭВМ. Это позволяет использовать в составе распределенной системы терминального управления микропроцессорную технику, что в свою очередь позволит миниатюризировать достаточно сложные технические решения.
Данный проект ставит своей целью разработку концепции и программного обеспечения для распределенной системы терминального управления техническим объектом, в роли которого выступает робототехнический комплекс. Такая система может быть эффективно использована при решении задач, связанных с построением систем автоматического управления, функционирующих в экстремальных условиях.
В первом разделе выполняется постановка задачи на дипломное проектирование. Во втором разделе дается обзор существующих методов построения дистанционно управляемых систем автоматического управления. В третьем разделе описывает основные принципы, использующиеся при синтезе терминальных управлений. Четвертый раздел описывает концепцию распределенной системы терминального управления, разрабатываемой в проекте. Пятый раздел связан с экспериментальной моделью проектируемой системы. Шестой раздел посвящен разработке программного обеспечения для распределенной системы терминального управления. Седьмой раздел связан с технико-экономическим обоснованием дипломного проекта. Восьмой раздел посвящен вопросам охраны труда и окружающей среды. Общие вопросы гражданской обороны освещены в девятом разделе.
Постановка задачи
В рамках дипломного проекта необходимо разработать концепцию и программное обеспечение распределенной системы терминального управления техническим объектом. В качестве технического объекта необходимо рассматривать робототехнический комплекс.
1.1 Функциональные требования к системе
Разрабатываемая система терминального управления (РСТУ) техническим объектом должна быть адаптирована к функционированию в экстремальных условиях, т.е. условиях, в которых существует угроза жизни и здоровью человека. Система не должна быть полностью автоматической, в ее составе должна быть отведена роль для оператора – лица, принимающего решения и выполняющего установку необходимых параметров для функционирования системы, а также задающего команды исполнительным частям системы. Поскольку условия, в которых работает разрабатываемая система предполагает наличие экстремальных условий работы, необходимо построить распределенную систему терминального управления. В этом случае оператор, осуществляющий контроль и управление системой, и объект управления (робототехническая система), находятся на значительном удалении друг от друга, достаточном для обеспечения безопасности оператора. При формировании закона терминального управления возможно использование информации об окружающей обстановке от распределенных в пространстве датчиков, поэтому необходимо предусмотреть возможность оперативного обновления и поступления информации от измерительных систем датчиков на пульт управления оператору РСТУ.
Контроль и управление должны осуществляться с помощью специализированного программного обеспечения. Пересылка команд объекту управления может быть осуществлена с использованием сетевых технологий. Разрабатываемая система должна отвечать повышенным требованиям к надежности функционирования всех отдельных частей системы, поэтому рекомендуется рассмотреть возможность подключения резервных элементов, наиболее важных для обеспечения работоспособности системы.
Требования к программному обеспечению
Программное обеспечение (ПО) для РСТУ должно быть ориентировано на работу под управлением операционной системы семейства Windows NT. Использование операционной системы семейства NT позволит повысить отказоустойчивость ПО. Разрабатываемое ПО должно обладать графическим интерфейсом пользователя, обеспечивающим интуитивно понятную работу оператора РСТУ с программой управления системой. Для представления результатов работы необходимо предусмотреть возможность отображения экспериментальных данных в виде таблиц и графических зависимостей. Для анализа аварийных и чрезвычайных ситуаций необходимо предусмотреть возможность протоколирования работы программы управления РСТУ.
При разработке следует использовать модульный подход к разработке программного обеспечения. Это позволит обеспечить возможность адаптации ПО к различным техническим объектам. В соответствии с функциональной спецификой РСТУ, разрабатываемое ПО должно поддерживать возможность обмена данными по локальным (или глобальным) сетям с использованием протокола TCP/IP.
Требования к ЭВМ
Разрабатываемое ПО пульта управления РСТУ должно быть ориентировано на работу на IBM PC совместимых персональных компьютерах. Минимальная конфигурация должна отвечать следующим условиям:
- процессор класса Intel Pentium/Celeron с тактовой частотой не менее 1 ГГц;
- объем оперативной памяти не менее 256 Мб;
- объем жесткого диска не менее 20 Гб;
- объем видеопамяти не менее 32 Мб;
- наличие сетевой платы, обеспечивающей пропускную способность 100 Мбит в секунду.
Персональная ЭВМ должна быть подключена к источнику бесперебойного питания.
Требования к экспериментальной модели
Для апробации алгоритмов управления рекомендуется создать имитационную модель, позволяющую промоделировать реакцию робототехнической системы на поданное терминальное управление. Использование экспериментальной имитационной модели позволит сэкономить значительные средства, необходимые для проведения натурных испытаний. Для построения такой модели рекомендуется использовать среду инженерных расчетов и моделирования Matlab. Разработанная модель может быть использована для исследовательских целей. При разработке модели, также как и при разработке программного обеспечение следует использовать модульный подход.
Дата: 2019-12-10, просмотров: 418.