В любом, сколь угодно сложном, цифровом устройстве в интегральною исполнении может быть найдено достаточно большое число часто повторяющихся относительно простых схем, реализующих простую логическую функцию. Такие схемы могут выпускаться самостоятельно в составе любой серии цифровых ИМС и называются обычно базовые логическими элементами, или базовыми модулями. Логическими функциями, которые реализуются базовыми модулями, являются обычно "И-НЕ" либо "ИЛИ-НЕ”.
Однако всеобъемлющим и широко применяемым на практике является разделение, учитывающее технологические, конструктивные особенности и элементную базу схем, на следующие типы:
транзисторные логические элементы с непосредственными связями (НСТЛ);
транзисторные логические элементы о резистивными связями (РТЛ1, РТЛ2, РЕТЛ);
диодно-транзисторные логические элементы (ДТЛ);
транзисторно-транзисторные логические элементы (ТТЛ);
диодно-транзисторные и транзисторно-транзисторные логические элементы с диодами и транзисторами Шоттки (ДТЛШ и ТТЛШ);
логических элементы на комплементарных МОП транзисторах (КМОПТЛ).
Из перечисленных типов цифровых ИМС НСТЛ и РТЛ устарели и уже не выпускаются промышленностью. Применение ДТП очень ограничено. Широко применяются логические схемы типа ТТЛ, ЭСТЛ, МОПТЛ, КМОПТЛ, И2Л, которые и служат элементной базой современных сложных цифровых интегральных схем.
Основными параметрами логических элементов (базовых модулей), как и цифровых интегральных схем вообще, являются следующие:
1. Величина и число источников питания.
2. Мощность, потребляемая одним элементом - P пот.
3. Коэффициент объединения по входу K об. Представляет собой максимальное число входов, которые может иметь элемент заданного типа.
4. Коэффициент разветвления по выходу - К раз. Представляет собой число входов интегральных схем серии, которые могут быть подключены к выходу элемента без нарушения его нормальной работы. Характеризует нагрузочную способность схемы.
5. Быстродействие. Оценивается как среднее время задержки распространения сигнала t зд, р, ср (рис .1).
6. Работа переключения. Представляет собой произведение потребляемой мощности на среднее время задержки:
7. Помехоустойчивость схем. Различают статическую и динамическую помехоустойчивость.
6.Понятие триггера. Асинхронный и синхронный триггер
Триггер-это элементарный автомат, который имеет два устойчивых состояния: одно из них обозначается как состояние нуля(0), а другое- как состояние единицы(1). Физически каждому состоянию соответствуют два устойчивых значения выходного сигнала(логического «0» и логического «1»). При воздействии внешних управляющих сигналов схема триггера может скачкообразно переключаться, изменяя значения выходных сигналов. Триггер применяется для хранения значения логической переменной или значения одноразрядного двоичного числа.
Классификация триггеров. Они классифицируются на несколько типов в зависимости от принципа их работы и целевого назначения. Имеется классификация по способу управления и по способу организации логических связей.
По способу управления триггеры подразделяются на два класса: синхронизируемые и несинхронизируемые(асинхронные). Синхронизируемые триггеры снабжаются вспомогательными входами синхронизации, которые разрешают переключение триггеров при наличии на этом входе соответствующего сигнала.
По способу организации логических связей триггеры классифицируются на следующие типы: RS- с раздельной установкой состояний «1» и «0»; Т-со счетным входом, когда каждый входной сигнал переключает триггер; D – с приемом информации по одному входу; JK (универсальный)- совмещает в себе свойства D,RS и Т триггеров.
Основные обозначения. Выходы триггера имеют обозначения Q без инверсии(прямой выход) и с инверсией( инверсный выход). Триггеры имеют различные типы входов и они имеют такие обозначения:
R (от англ. Reset ) - раздельный вход установки в состояние нуля(0);
S (от англ. Set )- раздельный вход установки в состояние 1;
K - вход установки универсального триггера в состояние 0;
J - вход установки универсального триггера в состояние 1;
T - счетный вход, когда триггер переключается от каждого сигнала;
D (от англ. Delay ) - информационный вход установки триггера в состояние. соответствующее логическому уровню на этом входе;
C – управляющий(синхронизирующий)вход
 |
Асинхронные триггеры. Они имеют название RS – триггеров и могут быть построены на элементах И-НЕ (рис.3) и на элементах ИЛИ – НЕ(рис2).

Рис.3
При рассмотрении триггеров нужно уметь записать 1 и записать 0. Если верхний выход символ. Равен 1, то триггер находится в единичном состоянии.
Q =1 и  =0
=0
Если Q =0, то триггер находится в нуле;
Запись 1: Q =0
Для этого S =0 и R =1 не должно быть  или равно 1;
или равно 1;
Рис.2
Триггер построен на элементах ИЛИ-НЕ
Запись1:
Q =1, тогда S =1, R =0;
Синхронные триггеры.
Такие триггеры имеют схемы управления на элементах И-ИЛИ И-НЕ.
Обязательно имеется вход согласования(синхронизации) входов S и R .
На вход С обычно подается импульс.
Запись 1:
(рис.4)на левый триггер S =1, C =1, R =0 ,тогда Q =1;
Рис.4б
Схема управления на И-НЕ
Запись 1:
S =1, C =1, выход И-НЕ=0, триггер переключится в 1( Q =1).В услов. изображении S и R не имеют на входах символы инверсии. Поэтому запись Q =1 выполняется при S = C =1 и R =0;
Запись 0: Q =0, R = C =1 , S =0;
D -триггер. Синхронный триггер с одним информационным входом получил название D - триггера.(Рис.5).Микросхема К155ТМ2
В ней 2 D -триггера с асинхронными входами R и S . Запись 0 или 1 выполняется 2 способами:
· По синхронным входам
· По асинхронным входам
При записи по синхронным входам D и С, R и S входы не должны мешать, поэтому нужно подавать R = S =1; при записи по входам R и S , входы D и C не мешают.


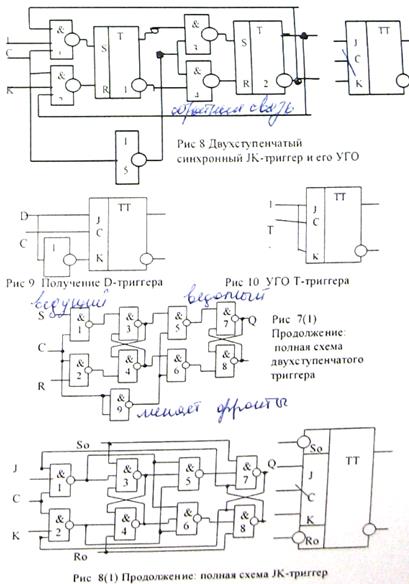
Двухступенчатые триггеры. Они находят широкое применение в цифровой технике. Такие триггеры содержат две синхронные триггерные структуры (Рис.6):
Один триггер носит название ведущий, а второй ведомый.
Такие триггеры работают в два этапа: в начале выполняется запись на ведущий триггер, а потом с него переписывается на ведомый, по переднему фронту идет запись на ведущий, а по заднему на ведомый.
На рис.7 показана принципиальная схема 2-х ступенчатого синхронного RS - триггера.
По рисунку 7 элемент 5 меняет фронты при С=1 идет запись на ведущий триггер С=1 после элемента 5 равно 0, тогда выходы эл.3 и эл.4 равны 1 и ведомый триггер(выходной) не меняет состояние(хранит предыдущее). При С=0 выход эл.5 равен 1-является условным прохождения выходов ведущего триггера через элементы 3 и 4,для записи на ведомый(выходной) триггер.
По рис8.
Сделаны обратные связи. Получается JK - триггер. На рис.8 показано по одному J , K входам. В реальных микросхемах по 3 входа (микросхема К155ТВ1).
На рис. 9 и 10 показано получение из JK триггера соответственно D и T -триггеров.
Т-триггер-это такой триггер, который всегда переключается под импульсом, подаваемым на вход С. В это время по рис.10 J = K =1.
По рис.7(1).Здесь приведена полная схема 2-х ступенчатого триггера.
Рис.8(1) имеет обратные связи и асинхронные входы S 0 и R 0, но отсутствует элемент 9. Роль эл. 9 выполняют эл.1 и эл.2 по очереди.
Диаграмма работы триггера.
Рассмотрим диаграмму по рис.7(1).В диаграмме нужно отражать запись 1 и 0;
7.Тема шины: общие сведения об информационных потоках
В ВМ для каждого модуля имеются свои информационные потоки.
Рассмотрим модуль памяти.
Операции: Запись, чтение.
Для этого должны быть линии адреса и линии, записываемых данных(32,64,128-разрядные);
Выходные данные-результат чтения ячеек памяти.
Модуль ЦП- для его работы выбираются команды(Assembler) и обрабатываемые данные.Для переключения ЦП на другую работу используются сигналы прерывания(int 10h,int 21h). Результаты обработки выдаются на линии данные. ЦП выдает свои сигналы прерывания для других устройств(сканер, принтер),чтобы их не включали другие устройства.
Модуль ввода-вывода.Для его работы имеются 4 группы сигналов. Выводится 3 группы сигналов. Данные направляются для устройств(принтер, сканер, звук.карты, видеокарты и сигналы прерывания, напрвленные в ЦП).

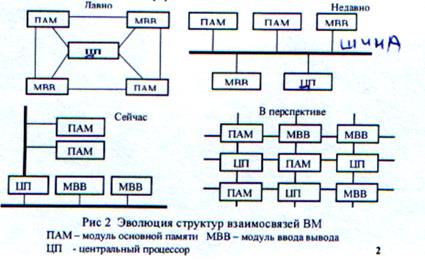
8.Тема шины: эволюция структур взаимосвязей.
На рис.2. показаны 4 варианта взаимосвязей устройств ВМ.
«Давно»-эта схема ВМ по Фон-Нейману. Её недостаток: непосредственные связи и плохо поддается модернизации.
«Недавно»- связь устройств, осуществляется через 1 шину.
Недостаток: большая нагрузка на шину, основные проходят ЦП-ПАМ. Поэтому мало времени уделяется на обмен информацией между МВВ-ЦП.
«Сейчас»- Ускорить работу шины можно путем выделения дополнительной шины. На рис. «сейчас» показаны 2 шины. Реально на материнской плате выделены 3 шины. Поэтому скорость обмена информацией в 3-шинной ПК увеличена.
« В перспективе» - считается, что можно взаимосвязь устройств организовать в виде матрицы.
9.Общие сведения о шинах ЭВМ.
Для связи с внешним миром ВМ обеспечивается системой шин. Большинство ВМ содержат несколько различных шин. Каждая из которых оптимизирована под определенный вид коммуникаций. Часть шин скрыта внутри интегральных микросхем или доступна только в пределах печатной платы. Некоторые шины имеют доступ для подключения дополнительных устройств. Большинство таких шин не просто доступны ,но и отвечают определенным стандартам, что позволяет подсоединить к шине устройства различных производителей.
Каждая конкретная шина имеет свои характеристики. Сюда входят:
· Совокупность сигнальных линий;
· Физические, механические и электрические характеристики шины;
· Используемые сигналы арбитража(система приоритетов), состояния, управления и синхронизации
· Правила взаимодействия подключенных к шине устройств(протокол шины).
Физически линии шины реализуются в виде отдельных проводников, как полоски проводящего материала на монтажной плате либо как алюминиевые или медные дорожки на кристалле микросхемы. Как видим, шина - это набор коммуникационных линий, способных передавать сигналы, соответствующие двоичным цифрам 0 или 1.
Операции на шине называются транзакциями. Основные виды транзакций - чтение и запись. Если в обмене участвуют устройство ввода-вывода, то говорят о транзакции ввода и вывода, что соответствует транзакции чтения и транзакции записи. Шинная транзакция включает в себя две части: посылку адреса и прием (или посылку) данных.
Если в операции на шине участвуют два устройства, то одно из них должно инициировать обмен и управлять операцией на шине. Такое устройство называют ведущим(bus master). Это такое устройство, которое способно взять на себя владение шиной и управлять пересылкой данных. Ведущий не обязательно использует данные сам. Он, например, может захватить управление шиной в интересах другого устройства.
Устройства, не обладающие возможностями инициирования транзакции, носят название ведомых ( bus slave).
Если к шине подключаются несколько ведущих устройств, то только одно устройство в любой момент времени может быть активным. Для предотвращения одновременной активности нескольких ведущих на шине предусматривается процедура допуска к управлению шиной только одного из претендентов(арбитраж). Арбитража не требуется. Если ведущий передает информацию сразу нескольким ведомым(широковещательный режим).
10. Иерархия шин ЭВМ. Типы шин ЭВМ.
Типы шин.
Важным критерием , определяющий характеристику шины, служит ее целевое назначение. По этому критерию можно выделить:
· Шины «процессор-память»
· Шины ввода-вывода
· Системные шины
Шина «процессор-память». Эта шина обеспечивает непосредственную связь между ЦП ВМ и основной памятью (ОЗУ). В современной трактовке такую шину называют шиной переднего плана (FSB-Front- Side Bus).По этой шине происходит интенсивный обмен информацией. Что требует высокой полосы пропускания, т.е. количество информации. Проходящей в единицу времени, была наибольшей. Обычно роль этой шины выполняет системная плата. Однако в плане эффективности выгоднее использовать отдельную шину для выполнения операций между ЦП и памятью.
К рассматриваемому виду шины можно отнести также шину, связывающую ЦП с кэш-памятью (она известна как шина заднего плана- BSB- Back- Side Bus). Шина BSB позволяет вести обмен с большой скоростью, чем FSB. Это позволяет реализовать возможности более скоростной кэш-памяти.
Быстродействие фон-неймановских машин определяет обмен информацией между ЦП и памятью. Поэтому разработчики ВМ уделяют особое внимание связи ЦП с памятью. Для обеспечения максимальной пропускной способности шины « процессор-память» всегда проектируется с учетом особенностей организации системы памяти, и длина шины делается по возможности минимальной.
Шина ввода-вывода. Эта шина служит для соединения ЦП или памяти с устройствами ввода-вывода(УВВ). Имеется большое разнообразие устройств ввода-вывода. Поэтому эти шины унифицируются и стандартизируются. Большинство УВВ низкоскоростные и поэтому не требуется от шины ввода-вывода высокой пропускной способности (кроме видеосистем).такие шины содержат меньше линий по сравнению с шиной «процессор-память», но длина линий может быть весьма большой. Типичными примерами подобных шин могут служить шины PCI и SCSI.
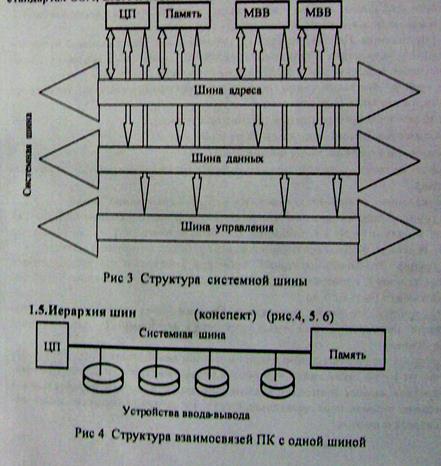
Системная шина. Для снижения стоимости некоторых ВМ организуется только одна шина как для памяти так для устройств ввода-вывода. Такая шина носит название системной (рис.3).Эти шины размещаются на монтажной плате.
Совокупность линий шины можно подразделить на три функциональные группы: шину адреса, шину данных и шину управления. Можно выделить еще и шину для подачи питающего напряжения.
Физически системная шина представляет собой совокупность параллельных электрических проводников. Такими проводниками служат металлические полоски на печатной плате. К шине подключаются все модули ВМ через разъемы.
Среди стандартизированных системных шин универсальных ВМ известны шины Unibus, Fastbus, VME, Nubus, Multibus-II. ПК строятся на основе системной шины в стандартах OSA, EISA и MCA.
11. Физическая реализация шин (механические и электрические аспекты).
Механические аспекты. Основная шина, которая объединяет устройства ВМ, обычно размещается на материнской плате. К ним припаивают разъемы для подключения дополнительных устройств. Дополнительные устройства выполняются в виде печатных плат, называемых модулями (дочерние платы).Для подключения питания дорожки выполняются в виде широких полосок(размещается на внутреннем слое платы или на обратной стороне материнской платы).
Контактные пружины в разъемах обеспечивают независимое подключение сигнальных линий, расположенных по обеим сторонам вставляемой в разъем дочерней платы. При установке модуля нужно прилагать значительные усилия, чтобы гарантировать надежный контакт после многократного извлечения из разъема, а также при длительной(многолетней)эксплуатации разъема в загрязненной среде.
Механические спецификации обычно включают такие детали, как разъемы плат, размеры и размещение направляющих для установки платы, разрешенное место для кабельного разъема, максимальная высота элементов на плате и т.д.
Электрические аспекты. По линиям шин передаются сигналы для каких-либо приемников информации. Схему, меняющую напряжение на шине, называют драйвером или возбудителем шины. В этом качестве может быть любая цифровая схема, если на ее выходе может формироваться один из двух возможных уровней напряжения, соответствующих 0 или 1.В ВМ возможно совместное использование шин несколькими устройствами. Тогда возникает проблема разъединения шины для каждого пользователя шины. Проблему можно решить , если не активное устройство будет отключено от шины, используемой в это время другим устройством. Это решается схемой драйвера. Разрабатываемый драйвер должен иметь на своем выходе три состояния: высокий уровень напряжения(high), низкий уровень напряжения(low) и отключен(off). Режим отключения эквивалентно отключению выхода драйвера от линий шины, чтобы активное устройство могло использовать шину.
Разработчикам приходится решать и другие проблемы: скорость распространения сигналов на линиях шины; отражение сигналов; перекос сигнала эффекты перекрестного влияния.
Теоретическая граница скорости распространения сигнала по линии шины -скорость света в свободном пространстве, т.е. около 300 мм/нс. Реальная скорость распространения сигнала определяется физическими характеристиками сигнальных линий и нагрузкой, которая не должна превышать 70% от скорости света.
По мере распространения сигнала по реальной линии сигнал преодолевает участки с различным сопротивлением. Из-за этого происходит следующее: часть сигнала продолжает продвижение, а часть -отражается в противоположную сторону. Прямой и отраженный сигналы могут повторно отражаться. Поэтому на линии формируется сложный результирующий сигнал. Сигнал, дошедший до конца линии, отражается назад. Чтобы не было отражения с конца линии, соединяют такой конец специально подобранным согласующим резистором. Такие резисторы должны размещаться на обоих концах сигнальных линий. Номиналы резисторов очень трудно подобрать.
Сигналы передаются по линиям параллельно, и они достигают приемников не совсем одновременно. Это явление получило название перекоса сигналов.
Сигнал распространяется по линии и вокруг него создается электростатическое и магнитные поля. Сигнальные линии располагаются в непосредственной близости друг от друга, и происходит взаимное влияние полей. Этот эффект называют перекрестной или переходной помехой.
Для уменьшения перекрестной помехи нужно разнести линии так, чтобы их поля не влияли друг на друга. Для печатной платы ограниченного размера такой способ не подходит. К снижению эффекта перекрестного влияния ведет уменьшение взаимной емкости и индуктивности линий. Этого можно добиться, если разместить вблизи сигнальных линий «земляные» линии или включить в многослойную печатную плату «земляные» слои. Это , однако, приводит к нежелательному эффекту увеличения собственной емкости линий. Наиболее распространенной является подход к снижению перекрестной помехи, он состоит в разделении линий изолятором с малой диэлектрической постоянной. В целом, при проектировании шин обычно используется комбинация перечисленных методов борьбы с перекрестной помехой.
////
Распределение линий шины.
Шина ВМ складывается из шин адреса, данных и управления.
Шина адреса. На шине адреса могут передаваться адреса ячеек памяти, номера регистров ЦП, адреса портов УВВ и т.д. Число сигнальных линий, выделенных для передачи адреса(ширина шины адреса), определяет максимально возможный размер адресного пространства. Это одно из базовых характеристик шины, поскольку от нее зависит потенциальная емкость адресуемой памяти и число обслуживаемых портов ввода-вывода.
Шина данных. Совокупность линий, служащих для передачи данных между модулями системы, называют шиной данных. Важнейшая характеристика шины - пропускная способность и ее ширина. Ширина шины данных - это количество бит, которое может быть передано по шине за одну транзакцию(цикл шины). Цикл шины следует отличать от периода тактовых импульсов. Одна транзакция на шине может занимать несколько тактовых импульсов. Ширина шины данных составляет 8, 16, 32, 64 или 128 бит. Ширина шины данных существенно влияет на производительность ВМ. Применение раздельных шин адреса и данных позволяет повысить эффективность использования шины, особенно в транзакциях записи, так как адрес ячейки памяти и записываемые данные можно передавать одновременно.
Шина управления. По ним передается управляющая информация и информация о состоянии участвующих в транзакции устройств. Сигнальные линии, входящие в шину управления, можно условно разделить на несколько групп.
Первая группа. Это такие линии, по которым передаются сигналы управления транзакциями, т.е. сигналы, определяющие:
· Тип выполняемой транзакции (чтение или запись)
· Количество байтов, передаваемых по шине данных
· Какой тип адреса выдан на шину адреса
· Какой протокол передачи должен быть применен(синхронный, асинхронный)
На перечисленные цели обычно отводится от 2 до 8 сигнальных линий.
Вторая группа. Сюда входят линии передачи информации о состоянии(статуса).
В эту группу входят от 1 до 4 линий, по которым ведомое устройство может информировать ведущего о своем состоянии или передать код возникшей ошибки.
Третья группа. Это линии арбитража. Арбитраж необходим для выбора одного из нескольких ведущих, одновременно претендующих на доступ к шине. Число линий арбитража может быть от 3 до 11.
Четвертая группа. Это линии прерывания. По ним передаются запросы на обслуживание, посылаемые от ведомых устройств к ведущему. Под запросы отводится от 1 до 2 линий.
Пятая группа. Сюда входят линии для организации последовательных локальных сетей. Наличие от 1 до 4 таких линий становится общепринятой практикой. Последовательная передача данных протекает значительно медленнее, чем параллельная и поэтому выгоднее строить последовательные сети, не загружая быстрые линии основных шин адреса и данных.
Имеется группа линий (от 2 до 6) для тактирования и синхронизации. При проектировании шины таким линиям уделяется особое внимание.
12. Понятие мультиплексированная шина.
Для экономии линий адреса и линий данных их объединяют. Так получается мультиплексируемая шина адреса /данных.Такая шина работает по принципу(адрес)(данные)(адрес)(…)
Рис8.
 Структура мультиплексирования шин адреса и данных.
Структура мультиплексирования шин адреса и данных.
//Из Интернета//
Для снижения общего количества линий связи магистрали часто применяется мультиплексирование шин адреса и данных. То есть одни и те же линии связи используются в разные моменты времени для передачи как адреса, так и данных (в начале цикла — адрес, в конце цикла — данные). Для фиксации этих моментов (стробирования) служат специальные сигналы на шине управления. Понятно, что мультиплексированная шина адреса/данных обеспечивает меньшую скорость обмена, требует более длительного цикла обмена По типу шины адреса и шины данных все магистрали также делятся на мультиплексированные и немультиплексированные.
В некоторых мультиплексированных магистралях после одного кода адреса передается несколько кодов данных (массив данных). Это позволяет существенно повысить быстродействие магистрали. Иногда в магистралях применяется частичное мультиплексирование, то есть часть разрядов данных передается по немультиплексированным линиям, а другая часть — по мультиплексированным с адресом линиям
13. Структуры ВМ и ВС.
//из конспектов к 1 лекции//
/*ВМ - это комплекс технических и программных сред, предназначенных для автоматизации, подготовки данных и решения задач пользователя.
ВС - совокупность взаимосвязанных и взаимодействующих ЦП или ВМ, периферийного оборудования(принтеры, сканеры, плоттеры и т.д.) также предназначенные для подготовки данных и решения задач пользователя.
Структура ВМ - охватывает вопросы физического построения, состава устройств и связи между ними.
Архитектура - логическое построение ВМ, какой она представляется программисту(память, регистры, языки программирования, команды ЦП)
Рис.1 Уровни детализации ВМ:
A. Уровень «черного ящика»
Дата: 2019-12-10, просмотров: 539.