Гидравлические системы
Гидроприводом называется совокупность устройств, предназначенных для приведения в движение механизмов и машин посредством рабочей жидкости, находящейся под давлением, с одновременным выполнением функций регулирования и реверсирования скорости движения выходного звена гидродвигателя.
Гидропривод представляет собой своего рода «гидравлическую вставку» между приводным двигателем и нагрузкой (машиной или механизмом) и выполняет те же функции, что и механическая передача редуктор, ремённая передача, кривошипно-шатунный механизм и т. д.).
Функции гидропривода
Основная функция гидропривода, как и механической передачи, — преобразование механической характеристики приводного двигателя в соответствии с требованиями нагрузки (преобразование вида движения выходного звена двигателя, его параметров, а также регулирование, защита от перегрузок и др.).
Другая функция гидропривода — это передача мощности от приводного двигателя к рабочим органам машины (например, в одноковшовом экскаваторе — передача мощности от двигателя внутреннего сгорания к ковшу или к гидродви-гателям привода стрелы, к гидродвигателям поворота башни и т.д.).
В общих чертах, передача мощности в гидроприводе происходит следующим образом:
приводной двигатель передаёт вращающий момент на вал насоса, который сообщает энергию рабочей жидкости.
Рабочая жидкость по гидролиниям через регулирующую аппаратуру поступает в гидродвигатель, где гидравлическая энергия преобразуется в механическую.
После этого рабочая жидкость по гидролиниям возвращается либо в бак, либо непосредственно к насосу.
Виды гидроприводов
Гидроприводы могут быть двух типов: гидродинамические и объёмные.
В гидродинамических приводах используется в основном кинетическая энергия потока жидкости (и соответственно скорости движения жидкостей в гидродинамических приводах велики в сравнении со скоростями движения в объёмном гидроприводе).
В объёмных гидроприводах используется потенциальная энергия давления рабочей жидкости (в объёмных гидроприводах скорости движения жидкостей не велики — порядка 0,5-6 м/с).
Объёмный гидропривод — это гидропривод, в котором используются объёмные гидромашины (насосы и гидродвигатели). Объёмной называется гидромашина, рабочий процесс которой основан на попеременном заполнении рабочей камеры жидкостью и вытеснении её из рабочей камеры. К объёмным машинам относят, например, поршневые насосы, аксиально-поршневые, радиально-поршневые, шестерённые гидромашины и др.
Гидравлический двигатель (гидродвигатель) — гидравлическая машина, предназначенная для преобразования гидравлической энергии в механическую. К гидродвигателям относят гидромоторы, гидроцилиндры, гидротурбины и поворотные гидродвигатели.)
Одна из особенностей, отличающая объёмный гидропривод от гидродинами-ческого, — большие давления в гидросистемах. Так, номинальные давления в гидросистемах экскаваторов могут достигать 32 МПа, а в некоторых случаях рабочее давление может быть более 300 МПа, в то время как гидродинамические машины работают обычно при давлениях, не превышающих 1,5—2 МПа.
Объёмный гидропривод намного более компактен и меньше по массе, чем гидродинамический, и поэтому он получил наибольшее распространение.
В зависимости от конструкции и типа входящих в состав гидропередачи элементов объёмные гидроприводы можно классифицировать по следующим признакам.
1. По характеру движения выходного звена гидродвигателя:
1.1. Гидропривод вращательного движения, когда в качестве гидродвигателя применяется гидромотор, у которого ведомое звено (вал или корпус) совершает неограниченное вращательное движение;
1.2. Гидропривод поступательного движения у которого в качестве гидродвига-теля применяется гидроцилиндр — двигатель с возвратно-поступательным движением ведомого звена (штока поршня, плунжера или корпуса);
1.3. Гидропривод поворотного движения, когда в качестве гидродвигателя применён поворотный гидродвигатель, у которого ведомое звено (вал или корпус) совершает возвратно-поворотное движение на угол, меньший 360°.
2. По возможности регулирования:
Регулируемый и нерегулируемым.
Если скорость выходного звена (гидроцилиндра, гидромотора) регулируется изменением частоты вращения двигателя, приводящего в работу насос, то гидро-привод считается нерегулируемым.
В Регулируемом гидроприводе в процессе его эксплуатации скорость выходного звена гидродвигателя можно изменять по требуемому закону. В свою очередь регулирование может быть:
-дроссельным
-объёмным
-объёмно-дроссельным.
- ручным или автоматическим.
В зависимости от задач регулирования гидропривод может быть:
-стабилизированным
-программным
-следящим (гидроусилители).
Саморегулируемый гидропривод автоматически изменяет подачу жидкости по фактической потребности гидросистемы в режиме реального времени (без фазового сдвига).
Насосный гидропривод
В насосном гидроприводе, получившем наибольшее распространение в технике, механическая энергия преобразуется насосом в гидравлическую, носитель энергии — рабочая жидкость, нагнетается через напорную магистраль к гидродвигателю, где энергия потока жидкости преобразуется в механическую. Рабочая жидкость, отдав свою энергию гидродвигателю, возвращается либо обратно к насосу (замкнутая схема гидропривода), либо в бак (разомкнутая или открытая схема гидропривода). В общем случае в состав насосного гидропривода входят гидропередача, гидроаппараты, кондиционеры рабочей жидкости, гидроёмкости и гидролинии.
Магистральный гидропривод
В магистральном гидроприводе рабочая жидкость нагнетается насосными станциями в напорную магистраль, к которой подключаются потребители гидравлической энергии. В отличие от насосного гидропривода, в котором, как правило, имеется один (реже 2-3) генератора гидравлической энергии (насоса), в магистральном гидроприводе таких генераторов может быть большое количество, и потребителей гидравлической энергии также может быть достаточно много.
Аккумуляторный гидропривод
В аккумуляторном гидроприводе жидкость подаётся в гидролинию от заранее заряжен-ного гидроаккумулятора. Этот тип гидропривода используется в основном в машинах и механизмах с кратковременными режимами работы.
Импульсный гидропривод ???
В гидроприводе этого вида выходное звено гидродвигателя совершает возвратно-поступательные или возвратно-вращательные движения с большой частотой (до 100 импульсов в секунду).
4.5. По типу приводящего двигателя гидроприводы бывают с электроприводом, приводом от ДВС, турбин и т. д.
Структура гидропривода
Обязательными элементами гидропривода являются насос и гидродвигатель. Насос является источником гидравлической энергии, а гидродвигатель — её потребителем, то есть преобразует гидравлическую энергию в механическую. Управление движением выходных звеньев гидродвигателей осуществляется либо с помощью регулирующей аппаратуры — дросселей, гидрораспределителей и др., либо путём изменения параметров самого гидродвигателя и/или насоса.
Также обязательными составными частями гидропривода являются гидролинии, по которым жидкость перемещается в гидросистеме и золотниковый гидрораспределитель .
Критически важной для гидропривода (в первую очередь объёмного) является очистка рабочей жидкости от содержащихся в ней (и постоянно образующихся в процессе работы) абразивных частиц. Поэтому системы гидропривода обязательно содержат фильтрующие устройства (например, масляные фильтры), хотя принципи-ально гидропривод некоторое время может работать и без них.
Поскольку рабочие параметры гидропривода существенно зависят от температуры рабочей жидкости, то в гидросистемах в некоторых случаях, но не всегда, устанавли-вают системы регулирования температуры (подогревающие и/или охладительные устройства).
Область применения
Объёмный гидропривод применяется в горных и строительно-дорожных машинах. В настоящее время более 50% общего парка мобильных строительно-дорожных машин (бульдозеров, экскаваторов, автогрейдеров и др.) является гидрофицированной. Это существенно отличается от ситуации 30-х - 40-х годов 20-го века, когда в этой области применялись в основном механические передачи.
В станкостроении гидропривод также широко применяется, однако в этой области он испытывает высокую конкуренцию со стороны других видов привода [1].
Широкое распространение получил гидропривод в авиации. Насыщенность современных самолётов системами гидропривода такова, что общая длина трубопроводов современного пассажирского авиалайнера может достигать нескольких километров.
В автомобильной промышленности самое широкое применение нашли гидроусилители руля, существенно повышающие удобство управления автомобилем. Эти устройства являются разновидностью следящих гидроприводов. Гидроусилители применяют и во многих других областях техники (авиации, тракторостроении, промышленном оборудовании и др.).
В некоторых танках, например, в японском танке Тип 10, применяется гидростатическая трансмиссия, представляющая собой, по сути, систему объёмного гидропривода движителей. Такого же типа трансмиссия устанавливается и в некоторых современных бульдозерах.
В целом, границы области применения гидропривода определяются его преимуществами и недостатками.
Преимущества
К основным преимуществам гидропривода относятся:
1. Бесступенчатое регулирование скорости движения выходного звена гидропередачи и обеспечение малых устойчивых скоростей. Минимальная угловая скорость вращения вала гидромотора может составлять 2…3 об/мин.
2. Небольшие габариты и масса. Время разгона, благодаря меньшему моменту инерции вращающихся частей не превышает долей секунды в отличие от электродвигателей, у которых время разгона может составлять несколько секунд.
3. Частое реверсирование движения выходного звена гидропередачи. Например, частота реверсирования вала гидромотора может быть доведена до 500, а штока поршня гидроцилиндра даже до 1000 реверсов в минуту. В этом отношении гидропривод уступает лишь пневматическим инструментам, у которых число реверсов может достигать 1500 в минуту.
4. Большое быстродействие и наибольшая механическая и скоростная жесткость. Механическая жесткость - величина относительного позиционного изменения положения выходного звена под воздействием изменяющейся внешней нагрузки. Скоростная жесткость - относительное изменение скорости выходного звена при изменении приложенной к нему нагрузки.
5. Автоматическая защита гидросистем от вредного воздействия перегрузок благодаря наличию предохранительных клапанов. Простота предохранения приводного двигателя и исполнительных органов машин от перегрузок; например, если усилие на штоке гидроцилиндра становится слишком большим (такое возможно, в частности, когда шток, соединённый с рабочим органом, встречает препятствие на своём пути), то давление в гидросистеме достигает больших значений — тогда срабатывает предохранительный клапан в гидросистеме, и после этого жидкость идёт на слив в бак, и давление уменьшается;
6. Хорошие условия смазки трущихся деталей и элементов гидроаппаратов, что обеспечивает их надежность и долговечность. Так, например, при правильной эксплуатации насосов и гидромоторов срок их службы доведен в настоящее время до 5…10 тыс. ч работы под нагрузкой. Гидроаппаратура может не ремонтироваться в течение долгого времени (до 10…15 лет).
7. Простота преобразования вращательного движения в возвратно-поступательное и возвратно-поворотные без применения каких-либо механических передач, подверженных износу.
8. Простота автоматизации работы гидрофицированных механизмов, возможность автоматического изменения их режимов работы по заданной программе.
9. Возможность универсального преобразования механической характеристики приводного двигателя в соответствии с требованиями нагрузки;
10. Простота управления и автоматизации;
11. Надёжность эксплуатации;
12. Широкий диапазон бесступенчатого регулирования скорости выходного звена; например, диапазон регулирования частоты вращения гидромотора может составлять от 2500 об/мин до 30-40 об/мин, а в некоторых случаях, у гидромоторов специального исполнения, доходит до 1-4 об/мин, что для электромоторов трудно реализуемо;
12. Большая передаваемая мощность на единицу массы привода; в частности, масса гидравлических машин примерно в 10-15 раз меньше массы электрических машин такой же мощности;
13. Самосмазываемость трущихся поверхностей при применении минеральных и синтети-ческих масел в качестве рабочих жидкостей; нужно отметить, что при техническом обслуживании, например, мобильных строительно-дорожных машин на смазку уходит до 50% всего времени обслуживания машины, поэтому самосмазываемость гидропривода является серьёзным преимуществом;
14. Возможность получения больших сил и мощностей при малых размерах и весе передаточного механизма;
15. Простота осуществления различных видов движения — поступательного, вращательного, поворотного;
16. Возможность частых и быстрых переключений при возвратно-поступательных и вращательных прямых и реверсивных движениях;
17. Возможность равномерного распределения усилий при одновременной передаче на несколько приводов.
Л о пастные насосы
Рабочим органом лопастной машины является вращающееся рабочее колесо, снабженное лопастями. Лопастные насосы делятся на центробежные и осевые.
В центробежном лопастном насосе жидкость под действием центробежных сил перемещается через рабочее колесо от центра к периферии.
На рис. 7.1 изображена простейшая схема центробежного насоса. Проточная часть насоса состоит из трех основных элементов - подвода 1, рабочего колеса 2 и отвода 3. По подводу жидкость подается в рабочее колесо из подводящего трубопровода. Рабочее колесо 2 передает жидкости энергию от приводного двигателя. Рабочее колесо состоит из двух дисков а и б, между которыми находятся лопатки в, изогнутые в сторону, противоположную направлению вращения колеса. Жидкость движется через колесо из центральной его части к периферии. По отводу жидкость отводится от рабочего колеса к напорному патрубку или, в многоступенчатых насосах, к следующему колесу.
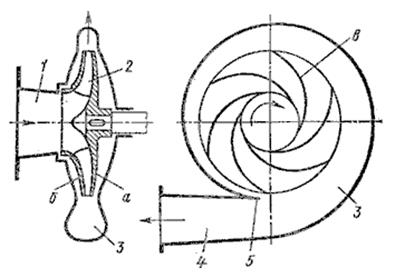
Рис. 7.1. Схема центробежного насоса
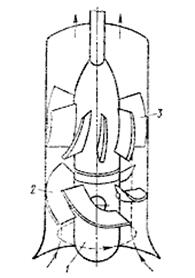
Рис. 7.2. Схема осевого насоса
В осевом лопастном насосе жидкость перемещается в основном вдоль оси вращение рабочего колеса (рис. 7.2). Рабочее колесо осевого насоса похоже на винт корабля. Оно состоит из втулки 1, на которой закреплено несколько лопастей 2. Отводом насоса служит осевой направляющий аппарат 3, с помощью которого устраняется закрутка жидкости, и кинетическая энергия ее преобразуется в энергию давления. Осевые насосы применяют при больших подачах и малых давлениях.
Осевые насосы могут быть жестколопастными, в которых положение лопастей рабочего колеса не изменяется, и поворотно-лопастными, в которых положение рабочего колеса может регулироваться.
Поршневые насосы
Поршневые насосы относятся к числу объемных насосов, в которых перемещение жидкости осуществляется путем ее вытеснения из неподвижных рабочих камер вытеснителями. Рабочей камерой объемного насоса называют ограниченное пространство, попеременно сообщающееся со входом и выходом насоса. Вытеснителем называется рабочий орган насоса, который совершает вытеснение жидкости из рабочих камер (плунжер, поршень, диафрагма).
Классифицируются поршневые насосы по следующим показателям:
1) по типу вытеснителей: плунжерные, поршневые и диафрагменные;
2) по характеру движения ведущего звена: возвратно-поступательное движение ведущего звена; вращательное движение ведущего звена (кривошипные и кулачковые насосы);
3) по числу циклов нагнетания и всасывания за один двойной ход: одностороннего действия; двухстороннего действия.
4) по количеству поршней: однопоршневые; двухпоршневые; многопоршневые.
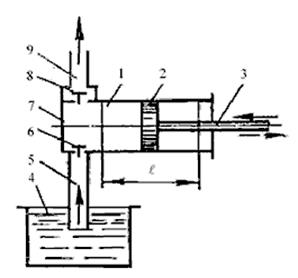
Рис. 7.3. Насос поршневой простого действия
Насос простого действия. Схема насоса простого действия изображена на рис. 7.3. Поршень 2 связан с кривошипно-шатунным механизмом через шток 3, в результате чего он совершает возвратно-поступательное движение в цилиндре 1. Поршень при ходе вправо создает разрежение в рабочей камере, вследствие чего всасывающий клапан 6 поднимается и жидкость из расходного резервуара 4 по всасывающему трубопроводу5 поступает в рабочую камеру 7. При обратном ходе поршня (влево) всасывающий клапан закрывается, а нагнетательный клапан 8 открывается, и жидкость нагнетается в напорный трубопровод 9.
Для повышения производительности поршневых насосов их часто выполняют сдвоенными, строенными и т.д. Поршни таких насосов приводятся в действие от одного коленчатого вала со смещением колен.
Действительная производительность насоса Q меньше теоретической, так как возникают утечки, обусловленные несвоевременным закрытием клапанов, неплотностями в клапанах и уплотнениях поршня и штока, а также неполнотой заполнения рабочей камеры.
Отношение действительной подачи Q к теоретической QT называется объемным КПД поршневого насоса:

Объемный КПД - основной экономический показатель, характеризующий работу насоса.
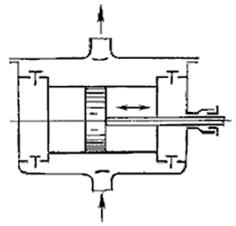
Рис. 7.4. Насос поршневой двойного действия
Насос двойного действия. Более равномерная и увеличенная подача жидкости, по сравнению с насосом простого действия, может быть достигнута насосом двойного действия (рис. 7.4), в котором каждому ходу поршня соответствуют одновременно процессы всасывания и нагнетания. Эти насосы выполняются горизонтальными и вертикальными, причем последние наиболее компактны.
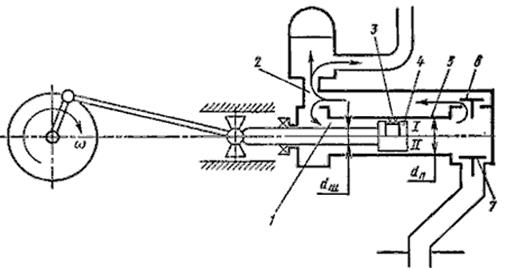
Рис. 7.5. Схема поршневого насоса с дифференциальным поршнем
Дифференциальный насос. В дифференциальном насосе (рис. 7.5) поршень 4 перемещается в гладко обработанном цилиндре 5. Уплотнением поршня служит сальник 3 (вариант I ) или малый зазор (вариант II) со стенкой цилиндра. Насос имеет два клапана: всасывающий 7 и нагнетательный 6, а также вспомогательную камеру 1. Всасывание происходит за один ход поршня, а нагнетание за оба хода. Так, при ходе поршня влево из вспомогательной камеры в нагнетательный трубопровод 2 вытесняется объем жидкости, равный (F - f )l; при ходе поршня вправо из основной камеры вытесняется объем жидкости, равный fl. Таким образом, за оба хода поршня в нагнетательный трубопровод будет подан объем жидкости, столько же, сколько подается насосом простого действия. Разница лишь в том, что это количество жидкости подается за оба хода поршня, следовательно, и подача происходит более равномерно.
!!!!!! 3.4. Радиально-поршневые насосы и гидромоторы
Радиально-поршневые гидромашины применяют при сравнительно высоких давлениях (10 МПа и выше). По принципу действия радиально-поршневые гидромашины делятся на одно-, двух- и многократного действия. В машинах однократного действия за один оборот ротора поршни совершают одно возвратно-поступательное движение.
Схема радиально-поршневого насоса однократного действия приведена на рис.3.6. Рабочими камерами в насосе являются радиально расположенные цилиндры, а вытеснителями - поршни. Ротор (блок цилиндров) 1 на скользящей посадке установлен на ось 2, которая имеет два канала 3 и 4 (один соединен с гидролинией всасывания, другой - с напорной гидролинией). Каналы имеют окна 5, которыми они могут соединяться с цилиндрами 6. Статор 7 по отношению к ротору располагается с эксцентриситетом.
Ротор вращается от приводного вала через муфту 8. При вращении ротора в направлении, указанном на рис.3.6. стрелкой, поршни 9 вначале выдвигаются из цилиндров (происходит всасывание), а затем вдвигаются (нагнетание). Соответственно рабочая жидкость вначале заполняет цилиндры, а затем поршнями вытесняется оттуда в канал 4 и далее в напорную линию гидросистемы. Поршни выдвигаются и прижимаются к статору центробежной силой или принудительно (пружиной, давлением рабочей жидкости или иным путем).
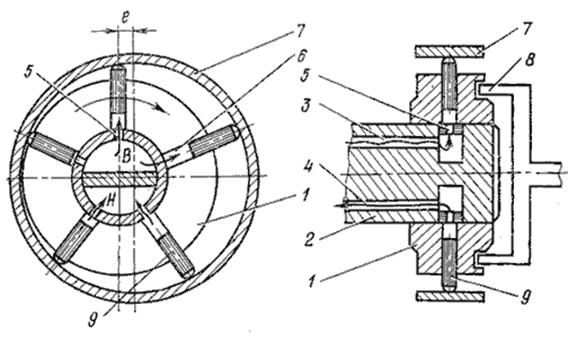
Рис.3.6. Схема радиально-поршневого насоса однократного действия
В серийных конструкциях радиально-поршневых насосов число поршней принимается нечетным (чаще всего z = 7 или z = 9). Число рядов цилиндров для увеличения подачи может быть увеличено от 2 до 6. В станкостроении применяют регулируемые радиально-поршневые насосы однократного действия типа НП, которые выпускают с максимальной подачей до 400 л/мин и давлением до 200 МПа.
На рис.3.7. представлен радиально-поршневой насос однократного действия типа НП с четырьмя рядами цилиндров, который состоит из корпуса 1 и крышки 25, внутри которых размещены все рабочие элементы насоса: скользящий блок 10 с крышкой 24, обойма 9 с крышкой 3 и реактивным кольцом 6, ротор 8 с радиально расположенными цилиндрами, поршни 7, распределительная ось 11, на которой на скользящей насадке установлены ротор, приводной вал 20 и муфта. Скользящий блок может перемещаться по направляющим 15, благодаря чему достигаются изменение эксцентриситета, а следовательно, и подача насоса. Величина эксцентриситета ограничивается указателем 19. Обойма вращается в двух подшипниках 12, а приводной вал - в подшипниках 14. Распределительная ось имеет каналы с отверстиями, через которые происходят всасывание и нагнетание. Муфта состоит из фланца 2, установленного на шлицах приводного вала промежуточного кольца 5 и четырех роликов 4, через которые крутящий момент предается от фланца к ротору. Для исключения утечек рабочей жидкости по валу служит уплотнение 21. Утечки по каналу 17 отводятся в корпус насоса, а из него через отверстие 13 в дренажную гидролинию.
Насос работает следующим образом. При вращении ротора поршни под действием центробежной силы выдвигаются из цилиндров и прижимаются к реактивным кольцам обоймы. При этом если между ротором и обоймой есть эксцентриситет, то поршни, кроме вращательного, будут совершать и возвратно-поступательные (в радиальном направлении) движения. Изменение эксцентриситета вызывает соответствующее изменение хода поршней и подачи насоса. Вместе с ротором во вращение вовлекается обойма, вращающаяся в своих подшипниках. Такая конструкция позволяет уменьшить силы трения и повысить КПД гидромашины.
Рис.3.7. Радиально-поршневой насос однократного действия типа НП
3.5. Аксиально-поршневые насосы и гидромоторы
Аксиально-поршневые гидромашины нашли широкое применение в гидроприводах, что объясняется рядом их преимуществ: меньшие радиальные размеры, масса, габарит и момент инерции вращающихся масс; возможность работы при большом числе оборотов; удобство монтажа и ремонта.
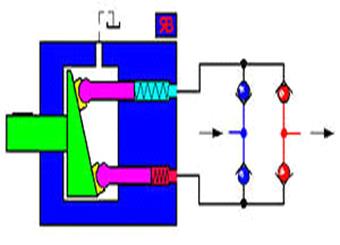
Аксиально-поршневой насос состоит из блока цилиндров 8 (рис.3.8) с поршнями (плунжерами) 4, шатунов 7, упорного диска 5, распределительного устройства 2 и ведущего вала 6.
Во время работы насоса при вращении вала приходит во вращение и блок цилиндров. При наклонном расположении упорного диска (см. рис.3.8, а, в) или блока цилиндров (см. рис.3.8, б, г) поршни, кроме вращательного, совершают и возвратно-поступательные аксиальные движения (вдоль оси вращения блока цилиндров). Когда поршни выдвигаются из цилиндров, происходит всасывание, а когда вдвигаются - нагнетание. Через окна 1 и 3 в распределительном устройстве 2 цилиндры попеременно соединяются то с всасывающей, то с напорной гидролиниями. Для исключения соединения всасывающей линии с напорной блок цилиндров плотно прижат к распределительному устройству, а между окнами этого устройства есть уплотнительные перемычки, ширина которых b больше диаметра dк отверстия соединительных каналов в блоке цилиндров. Для уменьшения гидравлического удара при переходе цилиндрами уплотнительных перемычек в последних сделаны дроссельные канавки в виде небольших усиков, за счет которых давление жидкости в цилиндрах повышается равномерно.
Рабочими камерами аксиально-поршневых насосов являются цилиндры, аксиально расположенные относительно оси ротора, а вытеснителями - поршни. По виду передачи движения вытеснителям аксиально-поршневые насосы подразделяются на насосы с наклонным блоком (см. рис.3.8, б, г) и с наклонным диском (см. рис.3.8, а, в). Известные конструкции аксиально-поршневых насосов выполнены по четырем различным принципиальным схемам.
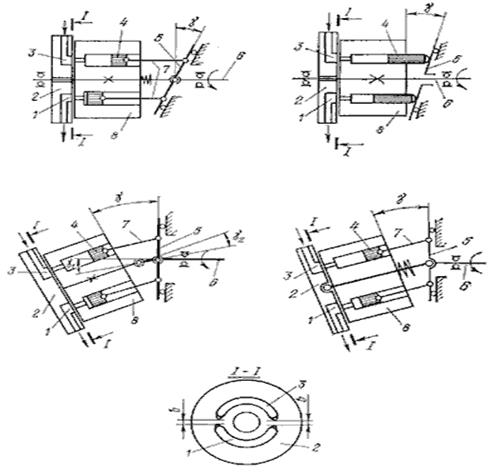
Рис.3.8. Принципиальные схемы аксиально-поршневых насосов:
1 и 3 - окна; 2 - распределительное устройство; 4 - поршни; 5 - упорный диск; 6 - ведущий вал; 7 - шатуны; 8 - блок цилиндров а - с иловым карданом; б - с несиловым карданом; в - с точечным касанием поршней; г - бескарданного типа
Насосы с силовым карданом (см. рис.3.8, а) приводной вал соединен с наклонным диском силовым карданом, выполненным в виде универсального шарнира с двумя степенями свободы. Поршни соединяются с диском шатунами. При такой схеме крутящий момент от приводящего двигателя передается блоку цилиндров через кардан и наклонный диск. Начальное прижатие блока цилиндров распределительному устройству обеспечивается пружиной, а во время работы насоса давлением жидкости. Передача крутящего момента блоку цилиндров необходима для преодоления сил трения между торцом блока цилиндров и распределительным устройством.
В насосах с двойным несиловым карданом (см. рис.3.8, б) углы между осью промежуточного вала и осями ведущего и ведомого валов принимают одинаковыми и равными 1 = 2 = /2. При такой схеме вращение ведущего и ведомого валов будет практически синхронным, а кардан полностью разгруженным, так как крутящий момент от приводящего двигателя передается блоку цилиндров через диск 5, изготавливаемый заодно с валом 6.

Насосы с точечным касанием поршней наклонного диска (см. рис.3.8, в) имеют наиболее простую конструкцию, поскольку здесь нет шатунов и карданных валов. Однако для того, чтобы машина работала в режиме насоса, необходимо принудительно выдвижение поршней из цилиндров для прижатия их к опорной поверхности наклонного диска (например, пружинами, помещенными в цилиндрах). По такой схеме чаще всего изготовляют гидромоторы типа Г15-2 (рис.3.9). Эти машины выпускаются небольшой мощности, т.к. в местах контакта поршней с диском создается высокое напряжение, которое ограничивает давление жидкости.
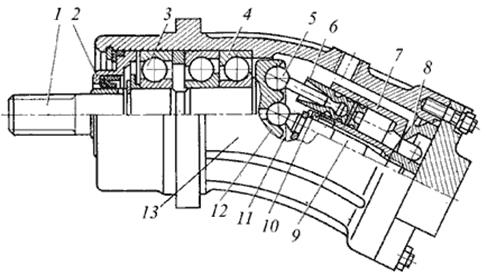
Рис.3.9. Аксиально-поршневой гидромотор типа Г15-2:
1 - вал; 2 - манжета; 3 - крышка; 4, 9 - корпус; 5, 16 - подшипник;
6 - радиально упорный подшипник; 7 - барабан; 8 - поводок; 10 - ротор;
11 - пружины; 12 - дренажное отверстие; 13 - распределительное устройство;
14 - полукольцевые пазы; 15 - отверстие напорное; 17 - поршни; 18 - шпонка; 19 - толкатель
Аксиально-поршневые машины бескарданного типа (см. рис.3.8, г) блок цилиндров соединяется с ведущим валом через шайбу и шатуны поршней. По сравнению с гидромашинами с карданной связью машины бескарданного типа проще в изготовлении, надежнее в эксплуатации, имеют меньший габарит блока цилиндров. По данной схеме отечественной промышленностью выпускается большинство аксиально-поршневых машин серии 200 и 300 (рис.3.10).
Подача (расход) аксиально-поршневой гидромашины зависит от хода поршня, который определяется углом γ наклона диска или блока цилиндров ( γ < 25 ). Если конструкция гидромашины в процессе ее эксплуатации допускает изменение угла γ, то такие машины регулируемые. При изменении угла наклона шайбы или блока цилиндров с + γ до - γ достигается реверсирование направления потока жидкости или вращения ротора гидромашины.
Мембранный насос
Мембранный насос, диафрагменный насос, диафрагмовый насос — объёмный насос, рабочий орган которого — гибкая пластина (диафрагма, мембрана), закреплённая по краям; пластина изгибается под действием рычажного механизма (механический привод) или в результате изменения давления воздуха (пневматический привод) или жидкости (гидравлический привод), выполняя функцию, эквивалентную функции поршня в поршневом насосе.
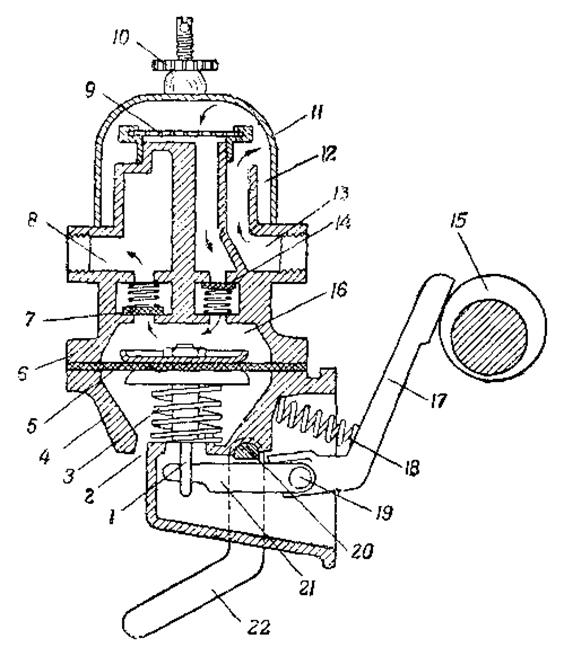
1 - шток; 2 - атмосферное отверстие; 3 - нагнетательная пружина; 4 - корпус насоса; 5 - диафрагма; 6 - крышка; 7 - выпускной клапан; 8 - выпускное отверстие; 9 - фильтр; 10 - гайка; 11 - стакан; 12 - отстойник; 13 - впускное отверстие; 14 - впускной клапан; 15 - эксцентрик; 16 - камера насоса; 17 - приводной рычаг; 18 - пружина; 19 - ось приводного рычага; 20 - валик; 21 - звено; 22 - рычажок ручной подкачки.
Гидроцилиндры
В качестве исполнительных механизмов (гидродвигателей) применяются силовые цилиндры, служащие для осуществления возвратно-поступательных прямолинейных и поворотных перемещений исполнительных механизмов. Гидроцилиндры подразделяются на поршневые, плунжерные, мембранные и сильфонные.
4.1. Механизмы с гибкими разделителями
К механизмам с гибкими разделителями относятся мембраны, мембранные гидроцилиндры и сильфоны. Мембраны (рис.4.1, а) применяют в основном при небольших перемещениях и
небольших давлениях (до 1 МПа). Мембранный исполнительный механизм представляет собой защемленное по периферии корпуса эластичное кольцо 1. При увеличении давления в подводящей камере 2 эластичное кольцо прижимается к верхней части корпуса 3, и шток 4, связанный с эластичным кольцом выдвигается. Обратный ход штока обеспечивает пружина 5.
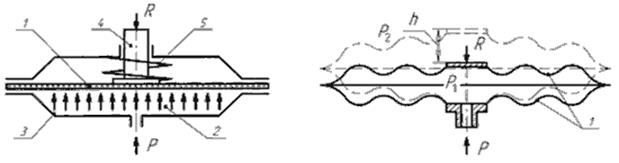
Рис.4.1. Схемы мембран:
а - плоская с эластичным кольцом; б - гофрированная металлическая
В гидропневмоавтоматике распространены также гофрированные металлические мембраны (рис.4.1, б).
Деформация таких мембран происходит за счет разности давлений и внешней нагрузки R.
Мембранные гидроцилиндры (рис.4.2) допускают значительны перемещения выходного звена - штока.
При перемещении поршня 1 в направлении действия давления жидкости (рис.4.2, а) мембрана 3 перегибается, перекатываясь со стенок поршня 1 на стенки цилиндра 2, к которым она плотно поджимается давлением жидкости (рис.4.2, б). Обратный ход поршня происходит за счет пружины.
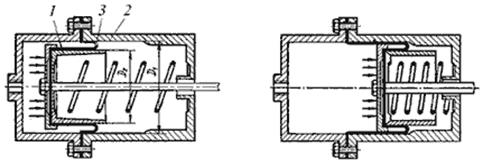
Рис.4.2. Схемы работы мембранного гидроцилиндра
Сильфоны (рис.4.3, а) предназначены для работы при небольших давлениях (до 3 МПа). Их изготавливают из металлов и неметаллических материалов (резины или пластиков). Металлические сильфоны бывают одно- и многослойные (до пяти слоев). Применение сильфонов оправдано в условиях высоких и низких температур, значение которых лимитируется материалом, из которого изготовлен сильфон. Сильфоны могут быть цельные или сварные. Цельные изготавливают развальцовкой тонкостенной бесшовной трубы.
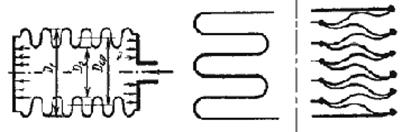
Рис.4.3. Схема металлического сильфона
а - сильфон; б - цельная стенка; в - сварная стенка
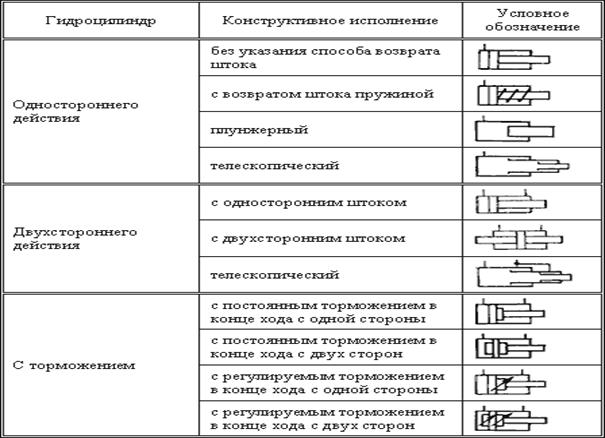
4.2. Классификация гидроцилиндров
Гидроцилиндры являются объемными гидромашинами и предназначены для преобразования энергии потока рабочей жидкости механическую энергию выходного звена. Гидроцилиндры работают
при высоких давлениях (до 32 МПа), их изготовляют одностороннего и двухстороннего действия,
с односторонним и двухсторонним штоком и телескопические.
Таблица 4.1 Классификация гидроцилиндров
4.3. Гидроцилиндры прямолинейного действия
Для привода рабочих органов мобильных машин наиболее широко применяют поршневые
гидроцилиндры двухстороннего действия с односторонним штоком (рис.4.4).
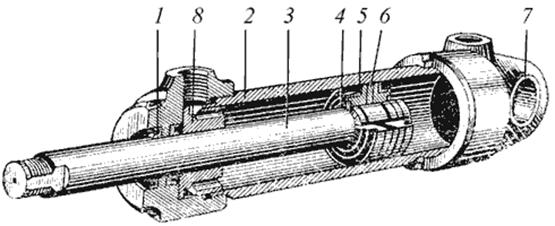
Рис.4.4. Гидроцилиндр:
1 - грязесъемник; 2 - гильза; 3 - шток; 4 - стопорное кольцо; 5 - манжета;
6 - поршень; 7 - проушина; 8 - грундбукса
Основой конструкции является гильза 2, представляющая собой трубу с тщательно обработанной внутренней поверхностью. Внутри гильзы перемещается поршень 6, имеющий резиновые манжетные уплотнения 5, которые предотвращают перетекание жидкости из полостей цилиндра, разделенных поршнем. Усилие от поршня передает шток 3, имеющий полированную поверхность. Для его направления служит грундбукса 8. С двух сторон гильзы укреплены крышки с отверстиями для подвода и отвода рабочей жидкости. Уплотнение между штоком и крышкой состоит из двух манжет, одна из которых предотвращает утечки жидкости из цилиндра, а другая служит грязесъемником 1. Проушина 7 служит для подвижного закрепления гидроцилиндра. На нарезанную часть штока крепится проушина или деталь, соединяющая гидроцилиндр с подвижным механизмом.
У нормализованных цилиндров, применяющихся в строительных машинах, диаметр штока составляет в среднем 0,5 D, ход поршня не превосходит 10D. При большей величине хода и давлениях, превышающих 20 МПа, шток следует проверять на устойчивость от действия продольной силы.
Для уменьшения потерь давления диаметры проходных отверстий в крышках цилиндра для подвода рабочей жидкости назначают из расчета, чтобы скорость жидкости составляла в среднем 5 м/с, но не выше 8 м/с.
Ход поршня ограничивается крышками цилиндра. В некоторых случая она достигает 0,5 м/с.
Жесткий удар поршня о крышку в гидроцилиндрах строительных машин предо-твращают демпферы (тормозные устройства). Принцип действия большинства из них основан на запирании небольшого объема жидкости и преобразования энергии движущихся масс в механическую энергию жидкости. Из запертого объема жидкость вытесняется через каналы малого сечения.
На рис.4.5. представлены типичные схемы демпферных устройств. Пружинный демпфер (рис.4.5, а) представляет собой пружину 1, установленную на внутренней стороне крышки цилиндра 2, тормозящую поршень 3 в конце хода.
Демпфер с ложным штоком (рис.4.5, б) представляет собой короткий ложный шток 1 и выточку 2 в крышке цилиндра. Ложный шток может иметь коническую или цилиндрическую форму. В конце хода поршня жидкость запирается ложным штоком в выточке крышки цилиндра и вытесняется оттуда через узкую кольцевую щель. Если ложный шток выполнен в виде конуса, то эта щель уменьшается по мере достижения поршнем конца своего хода. При этом сопротивление движению жидкости возрастает, а инерция, ускорение и скорость движения поршня уменьшаются.
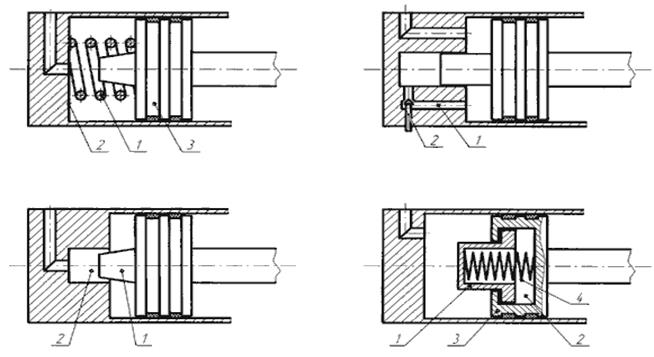
Рис.4.5. Принципиальные схемы демпферов:
а - пружинный демпфер; б - демпфер с ложным штоком;
в - демпфер регулируемый с отверстием; г - гидравлический демпфер
Регулируемый демпфер с отверстием (рис.4.5, в) по принципу действия аналогичен демпферу с ложным штоком. Конструктивное отличие заключается в том, что запираемая в выточке крышки цилиндра жидкость вытесняется через канал 1 малого сечения, в котором установлена игла 2 для регулирования проходного сечения отверстия.
Гидравлический демпфер (рис.4.5, г) применяется в том случае, когда конструкцией гидроцилиндра не может быть предусмотрено устройство выточки. В гидравлическом демпфере в конце хода поршня стакан 1 упирается в крышку цилиндра, а жидкость вытесняется из полости 2 через кольцевой зазор между стаканом 1 и поршнем 3. Пружина 4 возвращает стакан в исходное положение при холостом ходе поршня.
!!!!! 4.5. Поворотные гидроцилиндры
Для возвратно-поворотных движений приводимых узлов на угол, меньший 360 , применяют поворотные гидроцилиндры (рис.4.7.), которые представляют собой объемный гидродвигатель с возвратно-поворотным движением выходного звена.
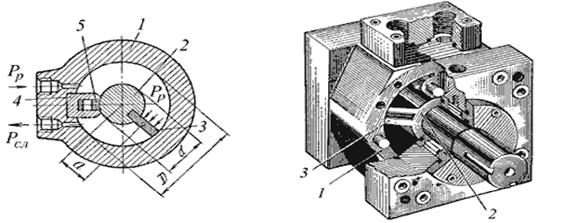
Рис.4.7. Поворотный однолопастной гидроцилиндр: а - схема; б - общий вид
Поворотный гидроцилиндр состоит из корпуса 1, и поворотного ротора, представляющего собой
втулку 2, несущую пластину (лопасть) 3. Кольцевая полость между внутренней поверхностью цилиндра и ротором разделена уплотнительной перемычкой 4 с пружинящим поджимом к ротору
уплотнительного элемента 5.
При подводе жидкости под давлением Pр в верхний канал (см. рис.4.7, а) пластина 3 с втулкой 2 будет поворачиваться по часовой стрелке. Угол поворота вала цилиндра с одной рабочей пластиной обычно не превышает 270…280 .
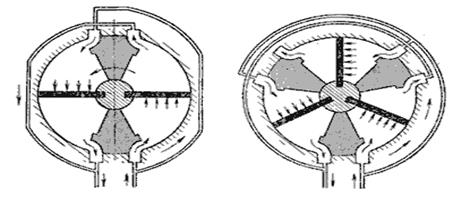
Рис.4.8. Поворотные гидроцилиндры: а - двухлопастной; б - трехлопастной
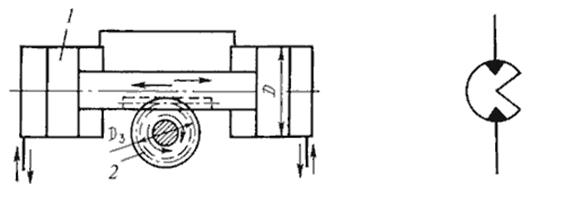
Рис.4.9. Речно-шестеренный механизм 4.10. Условное обозначение поворотного гидроцилиндра
Гидрораспределители 5.1. Общие сведения
При эксплуатации гидросистем возникает необходимость изменения направления потока рабочей жидкости на отдельных ее участках с целью изменения направления движения исполнительных механизмов машины, требуется обеспечивать нужную последовательность включения в работу этих механизмов, производить разгрузку насоса и гидросистемы от давления и т.п.
Эти и некоторые другие функции могут выполняться специальными гидроаппаратами - направляющими гидрораспределителями.
При изготовлении гидрораспределителей в качестве конструктивных материалов применяют стальное литье, модифицированный чугун, высоко- и низкоуглеродистые марки сталей, бронзу. Для защиты отдельных элементов распределителей от абразивного износа, поверхности скольжения цементируют, азотируют и т.п.
Размеры и масса гидрораспределителей зависят от расхода жидкости через них, с увеличением которого они увеличиваются.
По способу присоединения к гидросистеме гидрораспределители выпускают в трех исполнениях: резьбового, фланцевого и стыкового присоединения. Выбор способа присоединения зависит от назначения гидрораспределителя и расхода через него рабочей жидкости.
По конструкции запорно-регулирующего элемента гидрораспределители подразделяются следующим образом:
Золотниковые (запорно-регулирующим элементом является золотник цилиндрической или плоской формы). В золотниковых гидрораспределителях изменение направления потока рабочей жидкости осуществляется путем осевого смещения запорно-регулирующего элемента.
Крановые (запорно-регулирующим элементом служит кран). В этих гидрораспределителях изменение направления потока рабочей жидкости достигается поворотом пробки крана, имеющей плоскую, цилиндрическую, коническую или сферическую форму.
Клапанные (запорно-регулирующим элементом является клапан). В клапанных распределителях изменение направления потока рабочей жидкости осуществляется путем последовательного открытия и закрытия рабочих проходных сечений клапанами (шариковыми, тарельчатыми, конусными и т.д.) различной конструкции.
По числу фиксированных положений золотника гидрораспределители подразделяются: на двухпозиционные, трехпозиционные и многопозиционные.
По управлению гидрораспределители подразделяются на гидроаппараты с ручным, электромагнитным, гидравлическим или электрогидравлическим управлением. Крановые гидрораспределители используются чаще всего в качестве вспомогательных в золотниковых распределителях с гидравлическим управлением.
5.2. Золотниковые гидрораспределители
Запорно-регулирующим элементом золотниковых гидрораспределителей является цилиндрический золотник 1, который в зависимости от числа каналов (подводов) 3 в корпусе 2 может иметь один, два и более поясков (рис.5.1, а). На схемах гидрораспределители обозначают в виде подвижного элемента, на котором указываются линии связи, проходы и элементы управления. Рабочую позицию подвижного элемента изображают квадратом (прямоугольником), число позиций соответствует числу квадратов (рис.5.1, б).
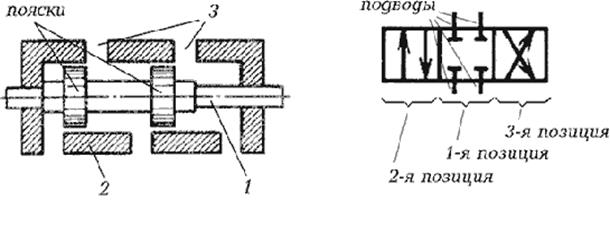
Рис.5.1. Схема (а) и обозначение (б) гидрораспределителя
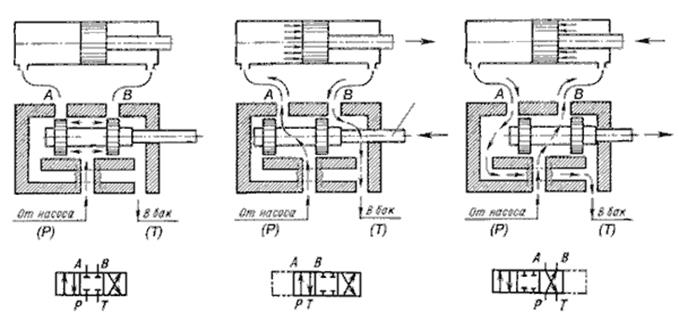
Рис.5.2. Схема работы золотникового гидрораспределителя
Рассмотрим принцип работы распределителя (рис.5.2). В первой (исходной) позиции все линии А, В , Р и Т, подходящие к распределителю разобщены, т.е. перекрыты (рис.5.2, а). При смещении золотника влево распределитель переходит во вторую позицию, в которой попарно соединены линии Р и А, В и Т (рис.5.2, б). При смещении золотника вправо - в третью, где соединяются линии Р и В, А и Т (рис.5.2, в). Такой распределитель часто называют реверсивным, так как он используется для остановки и изменения направления движения исполнительных органов.
В зависимости от числа подводов (линий, ходов) распределители могут быть двухходовые (двухлинейные); трехходовые (трехлинейные), четырех- и многоходовые. В соответствии с этим в обозначениях гидрораспределителей первая цифра говорит о числе подводов. Например, из обозначения гидрораспределителя "4/2" можно понять, что он имеет 4 подвода, т.е. он четырехходовой (четырехлинейный).
Вторая цифра в обозначении говорит о числе позиций. То же обозначение распределителя "4/2" говорит, что у него две позиции.
Устройство ручного гидрораспределителя 4/3 и его условного обозначения представлено на рис.5.4. Переключение позиций распределителя осуществляется рукояткой 1, которая при помощи серьги 2 шарнирно присоединяется к золотнику 10. С корпусом 6 рукоятка шарнирно соединена с ушком 11. Для фиксации каждого положения золотника служит шариковый фиксатор 9, помещенный в задней крышке 8. Утечки жидкости по золотнику со стороны передней крышки 3 исключаются манжетным уплотнением. Рабочая жидкость подводится к отверстию 5, а отводится через отверстие 4. Канал 7 дренажный, служит для отвода утечек.
На рис.5.5 изображен гидрораспределитель с электрогидравлическим управлением и его уловное обозначение. Он состоит из основного гидрораспределителя 2 с гидравлическим управлением и вспомогательного гидрораспределителя 1 с электромагнитным управлением. Основной гидрораспределитель управляет потоком рабочей жидкости гидросистемы, а вспомогательный регулирует поток управления. Такие гидрораспределители применяют в гидроприводах с дистанционным и автоматическим управлением при больших расходах и высоком давлении в гидросистеме, когда применение гидрораспределителей с электромагнитным управлением невозможно.
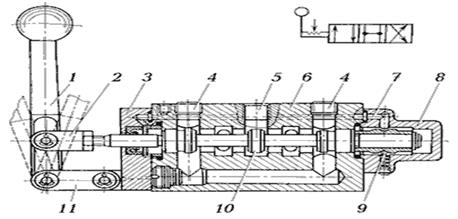
Рис.5.4. Гидрораспределитель с ручным управлением
В зависимости от числа золотников гидрораспределители подразделяют на распределители с одним и несколькими золотниками. В последнем случае распределители могут быть моноблочными или секционными. Секции распределителя соединяют между собой болтами. На рис.5.6 представлен моноблочный гидрораспределитель.
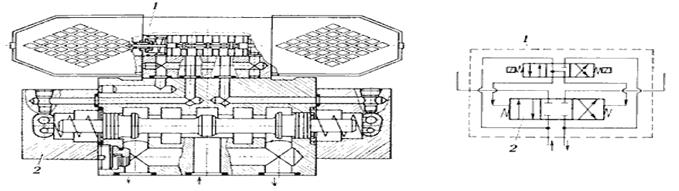
Рис.5.5. Гидрораспределитель с электрогидравлическим управлением
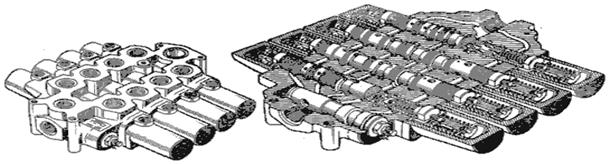
Рис.5.6. Общий вид (а) и продольный разрез (б) моноблочного четырехзолотникового гидрораспределителя
Золотники гидрораспределителя могут выполняться в трех исполнениях (рис.5.7).
Золотники с положительным осевым перекрытием (рис.5.7, а) имеют ширину поясков b больше, чем ширину проточки c или диаметр рабочих окон в корпусе. При нейтральном положении золотника такого гидрорапределителя напорная гидролиния отделена от линий, соединяющих полости гидродвигателя и слива. Величина перекрытия П = (b - c) / 2 зависит от диаметра золотника: при d = 10…12 мм перекрытие принимают равным 1…2 мм; при d до 25 мм - 3…5 мм; при d до 50 мм - 6…8 мм. Золотники с положительным осевым перекрытием позволяют фиксировать положение исполнительного механизма. Недостатком является наличие у них зоны нечувствительности, определяемой величиной осевого перекрытия: в пределах этой зоны при перемещении золотника расход жидкости через гидрораспределитель равен нулю, а исполнительный механизм не движется, несмотря на подаваемый к золотнику сигнал управления.
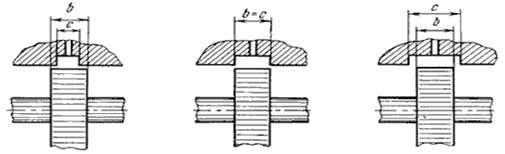
Рис.5.7. Конструктивные исполнения золотников
Золотники с нулевым осевым перекрытием (рис.5.7, б) имеют ширину пояска b равную ширине проточки c или диаметру рабочих окон, а осевое перекрытие П = 0. Такие золотники не имеют зоны нечувствительности и наилучшим образом удовлетворяют требованиям следящих гидросистем. Однако изготовление таких золотников связано со значительными технологическими трудностями.
Золотники с отрицательным осевым перекрытием (рис.5.7, в), у которых b < c; при нейтральном положении их напорная гидролиния соединена со сливом и с обеими полостями гидродвигателя. При этом жидкость через зазоры непрерывно поступает на слив, а в обеих полостях гидродвигателя устанавливается одинаковое давление. В гидрораспределителях с таким золотником зона нечувствительности сводится к минимуму, но из-за слива рабочей жидкости часть мощности теряется. Кроме этого, гидросистема с таким золотником будет иметь меньшую жесткость, так как из-за перетекания жидкости через начальные зазоры в золотнике будет переходить смещение исполнительного механизма при изменении преодолеваемой нагрузки.
5.3. Крановые гидрораспределители
В крановых гидрораспределителях изменение направления потока рабочей жидкости достигается поворотом пробки, имеющей плоскую, цилиндрическую, сферическую или коническую форму.
На рис.5.8 показана схема включения распространенного кранового распределителя в систему управления силовым цилиндром. Пробка крана имеет два перпендикулярных, но не пересекающихся отверстия. Она может занимать два и больше угловых положения.
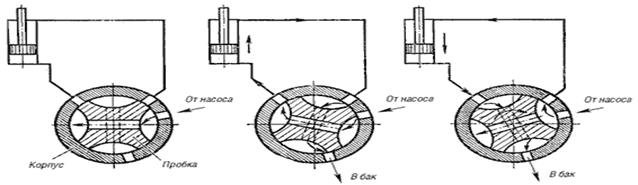
Рис.5.8. Схемы включения в гидросистему пробкового крана
Серийный двухпозиционный крановый гидрораспре-делитель Г71-3 (рис.5.9) с цилиндрической пробкой состоит из корпуса 3, фланца 5, крышки 1, пробки 2, уплотнения 4, ступицы 7, рукоятки 8 и шарикового фиксатора 6. В положении пробки крана, указанном на рисунке, жидкость через отверстие 17 поступает в камеру 16; из нее через канал 18 в пробке крана (показан пунктиром) - в камеру 12 и далее через отверстие 11 в корпусе к гидродвигателю или к другому управляемому объекту. Из другой полости гидродвигателя жидкость поступает в отверстие 9, далее в камеру 10 и через канал 13 в камеру, которая отверстием 15 в корпусе крана соединена со сливом. При повороте пробки крана по часовой стрелке на угол 45 происходит изменение направления потока рабочей жидкости.
Герметичность кранового гидрораспределителя обеспечивается за счет притирки пробки к корпусу крана. Для кранов с цилиндрической пробкой зазор между пробкой и корпусом принимают равным 0,01…0,02 мм. В этих кранах вследствие износа пробки и корпуса зазор между ними, а следовательно, и утечка рабочей жидкости с течением времени увеличиваются, что является недостатком такого кранового распределителя. Такого недостатка нет в крановых гидрораспределителях с конической пробкой.
Крановые гидрораспределители чаще всего применяют в качестве вспомогательных в золотниковых гидрораспределителях с гидравлическим управлением.
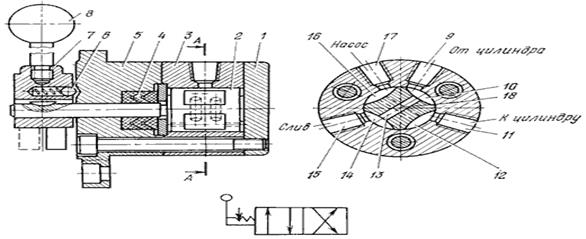
Рис.5.9. Крановый гидрораспределитель и его условное обозначение
5.4. Клапанные гидрораспределители
В гидросистемах некоторых машин применяют также клапанные распределители, которые просты в изготовлении и надежны в эксплуатации, а также могут обеспечить высокую герметичность.
Затвора клапанов приводят в действие ручными, механическими и электротехническими устройствами. Из ручных устройств наиболее распространены клапаны с качающимся рычагом, схема которого для питания одной полости гидродвигателя приведена на рис.5.10, а.
В клапанном распределителе (см.рис.5.10, а) в нейтральном (среднем) положении качающегося рычага 1 оба клапана 2 и 3 находятся в своих гнездах; в этом положении клапанов канал b гидродвигателя отсоединен как от канала a, связанного с насосом, так и от канала c, связанного с баком. При повороте рычага 1 вправо с гидродвигателем соединяется канал a насоса, при повороте влево - канал c бака.
Схема четырехходового клапанного распределителя представлена на рис.5.10, б. При повороте рукоятки 1 перемещается та или другая пары клапанов 2 или 3, обеспечивая подвод (отвод) жидкости к соответствующей полости силового цилиндра 4.
Распространены также клапаны с кулачковым приводом (рис.5.10, в). На валике 3 находятся четыре кулачка 2, соответствующим образом ориентированные один относительно другого. При повороте валика кулачки воздействуют на штоки соответствующего конусного затвора 1, обеспечивая подвод рабочей жидкости в полости илового цилиндра 5 и ее отвод. В положении, показанном на рассматриваемом рисунке, жидкость от канала, связанного с насосом, поступает через открытый (утопленный) затвор 4 в левую полость силового цилиндра 5 и удаляется в бак из правой полости цилиндра через клапан. Остальные два затвора находятся в своих седлах. При повороте валика вступают в действие эти затворы, обеспечивая подвод жидкости в правую полость цилиндра 5 и отвод ее из левой полости.
На рис.5.10, г представлена схема трехпозиционного клапанного распределителя прямого действия с двумя клапанами 1 и 4, управляемыми электромагнитами 2 и 3. При выключенных электромагнитах оба клапана прижаты пружинами к своим седлам. При этом магистраль нагнетания перекрыта, а полости гидродвигателя соединены со сливом.
При включении электромагнита 2 клапан 1, сжимая пружину, переместится в крайнее левое положение и прижмется к левому седлу. В этом положении одна из полостей потребителя соединится с напорной магистралью. При включенном электромагните 3 и выключенном электромагните 2 сработает клапан 4, соединив вторую полость потребителя с магистралью нагнетания.
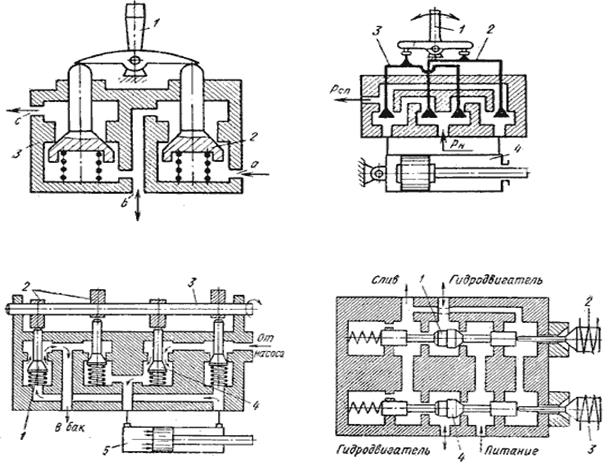
Рис.5.10. Клапанные распределители:
а, б - с качающимся рычагом; в - с кулачковым приводом;
г - с электромагнитным приводом
6. Регулирующая и направляющая аппаратура 6.1. Общие сведения.
Гидроаппаратом называется устройство, предназначенное для изменения или поддержания заданного постоянного давления или расхода рабочей жидкости, либо для изменения направления потока рабочей жидкости. Гидроаппаратура подразделяется на регулирующую и направляющую.
Регулирующая гидроаппаратура изменяет давление, расход потока рабочей жидкости за счет частичного открытия рабочего проходного сечения.
Направляющая гидроаппаратура предназначена только для изменения направления потока рабочей жидкости путем полного открытия или закрытия рабочего проходного сечения.
Рабочее проходное сечение гидроаппаратов изменяется при изменении положения запорно-регулирующего элемента, входящего в их конструкцию.
По принципу действия запорно-регулирующего элемента:
- гидроклапаны;
- гидроаппаратура неклапанного действия (дроссели).
В зависимости от конструкции запорно-регулирующего элемента гидроаппараты подразделяют на:
- золотниковые;
- крановые;
- клапанные.
По внешнему воздействию на запорно-регулирующий элемент:
- регулируемые;
- настраиваемые.
Гидроклапаном называется гидроаппарат, в котором величина открытия рабочего проходного сечения изменяется от воздействия проходящего через него потока рабочей жидкости.
По характеру воздействия на запорно-регулирующий элемент гидроклапаны могут быть прямого и непрямого действия. В гидроклапанах прямого действия величина открытия рабочего проходного сечения изменяется в результате непосредственного воздействия потока рабочей жидкости на запорно-регулирующий элемент. В гидроклапанах непрямого действия поток сначала воздействует на вспомогательный запорно-регулирующий элемент, перемещение которого вызывает изменение положения основного запорно-регулирующего элемента.
Гидроаппаратом неклапанного действия называется гидроаппарат, в котором величина открытия рабочего проходного сечения не зависит от воздействия потока проходящей через него рабочей жидкости. Такие гидроаппараты иначе называют дросселями. С точки зрения положений гидравлики дроссель представляет собой активное гидравлическое сопротивление.
6.2. Напорные гидроклапаны
Напорные гидроклапаны предназначены для ограничения давления в подводимых к ним потоках рабочей жидкости. На рис.6.1 приведены принципиальные схемы напорных клапанов прямого действия с шариковым, конусным, плунжерным и тарельчатым запорно-регулирующими элементами.
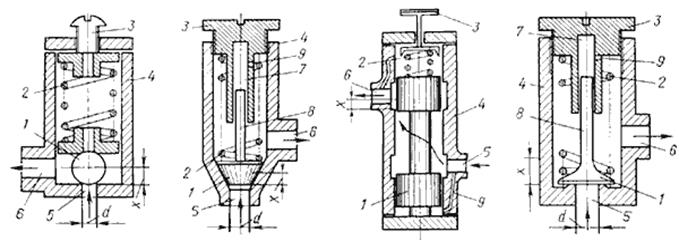
Рис.6.1. Принципиальные схемы напорных клапанов с запорно-регулирующими элементами:
а - с шариковым; б - с конусным; в - с золотниковым; г - с тарельчатым
Клапан состоит из запорно-регулирующего элемента 1 (шарика, конуса и т.д.), пружины 2, натяжение которой можно изменять регулировочным винтом 3. Отверстие 5 корпуса 4 соединяется с линией высокого давления, а отверстие 6 - со сливной линией. Часть корпуса, с которой запорно-регулирующий элемент клапана приходит в соприкосновение, называется седлом (посадочным местом).
При установке клапана в гидросистему пружина 2 настраивается так, чтобы создаваемое ею давление было больше рабочего, тогда запорно-регулирующий элемент будет прижат к седлу, а линия слива будет отделена от линии высоко давления. При повышении давления в подводимом потоке сверх регламентированного запорно-регулирующий элемент клапана перемещается вверх, преодолевая усилие пружины, рабочее проходное сечение клапана открывается, и гидролиния высокого давления соединяется со сливной. Вся рабочая жидкость идет через клапан на слив. Как только давление в напорной гидролинии упадет, клапан закроется, и если причина, вызвавшая повышение давления не будет устранена, процесс повторится.
Возникает вибрация запорно-регулирующего элемента, сопровождаемая ударами о седло и колебаниями давления в системе. Вибрация и удары могут служить причиной износа и потери герметичности клапанов.
Для уменьшения силы удара и частоты колебаний клапана о седло применяют специальные гидравлические демпферы (рис.6.1, б, г). Устройство состоит из камеры 7, в которой перемещается плунжер 8. Камера заполнена жидкостью. С линией слива эта камера соединяется тонким калибровочным отверстием 9 диаметром 0,8…1 мм. При открывании клапана плунжер вытесняет жидкость из камеры демпфера. Создаваемое при этом гидравлическое сопротивление, пропорциональное скорости движения плунжера, уменьшает частоту колебаний, силу удара запорно- регулирующего элемента и частично устраняет его вибрацию.
Достоинство клапанов прямого действия - высокое быстродействие. Недостаток - увеличение размеров при повышении рабочего давления, а также нестабильность работы.
При конструировании напорных клапанов их габарит и массу можно уменьшить, если применить дифференциальные клапаны или клапаны непрямого действия.
Дифференциальный клапан (рис.6.2) состоит из плунжера 1, который имеет два пояска диаметрами D и d, на которые воздействует жидкость.
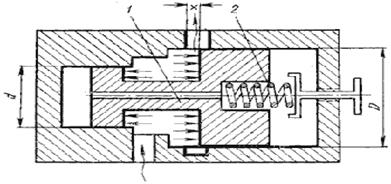
Рис.6.2. Принципиальная схема дифференциального клапана
Благодаря наличию поясков с разными диаметрами уменьшается активная площадь запорно-регулирующего элемента клапана, на которую воздействует жидкость, и он оказывается частично разгруженным. Это позволяет уменьшить размеры пружины и всего клапана в целом.
С уменьшением разности площадей поясков хотя и уменьшается усилие пружины, но одновременно уменьшается и соотношение действующих на запорно-регулирующий элемент клапана сил давления жидкости и сил трения этого элемента о корпус клапана. При определенных соотношениях D и d эти силы могут оказаться несоизмеримы между собой и клапан перестанет работать. Недостатком дифференциальных клапанов является скачкообразное изменение давления и расхода через клапан в момент его открытия.
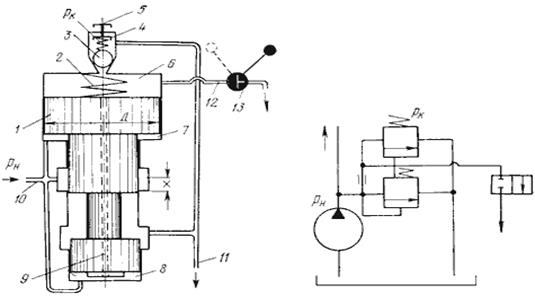
Рис.6.3. Напорный клапан непрямого действия: а - принципиальная схема; б - условное обозначение
Еще большего уменьшения размеров пружины и всего клапан в целом при одновременном повышении его герметичности можно достигнуть в клапанах непрямого действия (рис.6.3).
Клапан состоит из основного запорно-регулирующего элемента - золотника 1 ступенчатой формы; нерегулируемой пружины 2 и вспомогательного запорно-регулирующего элемента 3 в виде шарикового клапана прямого действия. Усилие пружины 4 шарикового клапана регулируется винтом 5. Каналами в корпусе клапана полости 7 и 8 соединены с гидролинией 10 высокого давления. Полость 6 соединена с полостью 8 капиллярным каналом 9 в золотнике. Пружины шарикового клапана 3 настраивается на давлениеPК (на 10…20% больше максимального рабочего в гидросистеме).
Если при работе машины давление в гидросистеме PН < PК, шариковый клапан закрыт, в полостях 6, 7, 8 устанавливается одинаковое давление PН, золотник 1 под воздействием пружины 2 занимает крайнее нижнее положение, а гидролиния высокого давления 10 отделена от гидролинии слива 11 (положение клапана соответствует изображенному на рис.6.3). Изменение давление в гидросистеме вызывает изменения давления в полостях 6, 7, 8 клапана. В тот момент, когда давление P Н превысит PК, шариковый клапан 3 откроется и через него жидкость в небольшом количестве начнет поступать на слив. В капиллярном канале золотника создается течение жидкости с потерей давления на преодоление гидравлических сопротивлений. Вследствие этого давление жидкости в полости 6 станет меньше давления в полостях 7 и 8. Под действием образовавшегося перепада давлений золотник 1 переместится вверх, сжимая пружину и соединяя линию 10 с линией 11. Рабочая жидкость будет поступать на слив, и перегрузки гидросистемы не произойдет. Однако как только линия высокого давления соединится со сливом, давление жидкости в гидросистеме уменьшится до PН < PК, шариковый клапан закроется и течение жидкости по капиллярному каналу прекратится. Давление в полостях 6, 7 и 8 выровняется и под воздействием пружины 2 золотник возвратится в исходное положение, снова отделив линию высокого давления от слива. Если причина, вызвавшая повышение давления в гидросистеме, не будет устранена, процесс повторится и золотник в конечном итоге установится на определенной высоте, при которой давление в гидросистеме будет поддерживаться постоянным.
Когда клапан находится в работе, золотник совершает колебательные движения. Уменьшению колебаний золотника способствует полость 7, оказывающая на него демпфирующее влияние.
Для разгрузки системы или какого-либо ее участка клапаны непрямого действия могут управляться дистанционно. Для этого полость 6 посредством канала 12 и крана 13 необходимо соединить со сливом. В результате давление в полости 6 резко упадет, золотник 1 поднимется вверх, а линия высокого давления 10 соединится со сливом 11.
По сравнению с клапанами прямого действия клапаны непрямого действия обладают рядом преимуществ:
1. Плавность и бесшумность работы.
2. Повышенная чувствительность.
3. Давление на входе в клапан поддерживается постоянным и не зависит от расхода рабочей жидкости через клапан.
6.3. Редукционный клапан
Редукционным называют гидроклапан давления, предназначенный для поддержания в отводимом от него потоке рабочей жидкости более низкого давления, чем давление в подводимом потоке. В гидроприводах находят применение в основном два типа редукционных клапанов.
Первый тип клапанов обеспечивает установленное соотношение между давлениями на входе и выходе из клапана.
Редукционный клапан (рис.6.4) состоит из запорно-регулирующего элемента - плунжера 1, прижатого к седлу пружиной 2, сила натяжения которой регулируется винтом 3. Отверстие 4 корпуса соединяется с гидролинией высокого давления, а отверстие 5 с гидролинией низкого давления. В исходном положении клапан прижат к седлу, а вход клапана отделен от выхода. При повышении давления P1 плунжер поднимается и гидролиния высокого давления соединяется с гидролинией низкого давления. Чем больше давление P1, тем больше открывается проходное сечение клапана и тем больше становится давление P2.
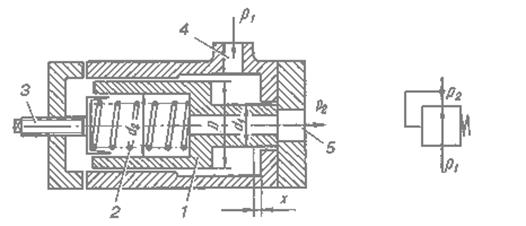
Рис.6.4. Редукционный клапан: а - принципиальная схема; б - условное обозначение
Второй тип редукционного клапана поддерживает постоянное редуцированное давление на выходе независимо от колебания давления в подводимом и отводимом потоках рабочей жидкости. Такие редукционные клапаны могут быть прямого и непрямого действия.
Рассмотрим работу редукционного клапана непрямого действия (рис.6.5). Клапан состоит из основного запорно-регулирующего элемента - золотника 1 ступенчатой формы, нагруженного нерегулируемой пружиной 2 с малой жесткостью, и вспомогательного запорно-регулирующего элемента 5 в виде шарикового клапана. Силу натяжения пружины 4 шарикового клапана можно изменять винтом 3. В корпусе клапана имеются каналы, соединяющие полости 7 и 8 с выходом, а в золотнике 1 - капиллярный канал 9, соединяющий полость 6 с полостью 8, а через последнюю и с выходом клапана.
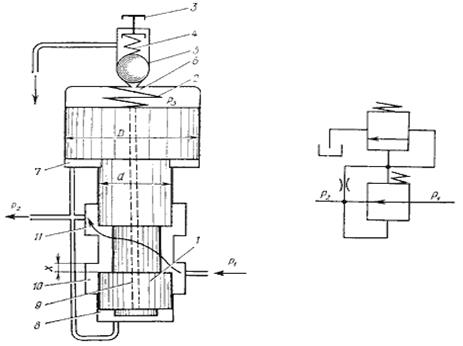
Рис.6.5. Редукционный клапан непрямого действия: а - принципиальная схема; б - условное обозначение
Если пружина 4 настроена на давление большее, чем давление P1 на входе клапана, то золотник 1 занимает исходное положение (показано на рис.6.5). В этом случае в полостях 6, 7 и 8 будет одинаковое давление, равное P1, полость 10 соединена с полостью 11, а жидкость свободно протекает через клапан. Редуцирования давления при этом не происходит. При настройке пружины 4 на давление P2 < P1шариковый клапан откроется и жидкость в небольшом количестве из полости 6 будет поступать на слив. В капиллярном канале 9 золотника создается течение жидкости с потерей в нем давления на преодоление гидравлических сопротивлений. В результате давление в полости 6 упадет и золотник поднимется вверх, уменьшив площадь живого сечения между полостями 10 и 11.
Это в свою очередь вызовет понижение давления в полостях 11, 8 и 7, опускание золотника и увеличение площади живого сечения между полостями 10 и 11. Процесс повторится снова, и золотник, совершая колебательные движения, установится на определенной высоте. Всякое изменение давления на входе или выходе клапана вызывает ответное перемещение золотника. В конечном итоге за счет изменения дросселирования давление на выходе клапана поддерживается постоянным. В этом клапане полость 7 и узкий канал, соединяющий полость с выходом клапана, оказывают демпфирующее влияние на золотник, уменьшая его колебания.
6.4. Обратные гидроклапаны
Обратным гидроклапаном называется направляющий гидроаппарат, предназначенный для пропускания рабочей жидкости только в одном направлении. Они могут иметь различные запорно-регулирующие элементы: шариковый, конусный, тарельчатый или плунжерный.
В соответствии со своим назначением обратный клапан должен быть герметичным в закрытом положении, т.е. в исходном положении запорно-регулирующего элемента. Для достижения абсолютной герметичности в закрытом положении применяют обратные клапаны с двумя или тремя последовательно соединенными запорно-регулирующими элементами.
Пружина обратных клапанов нерегулируемая, ее сила натяжения должна обеспечивать лишь преодоление сил трения и инерцию, а также быстрое возвращение в исходное положение запорно-регулирующего элемента.
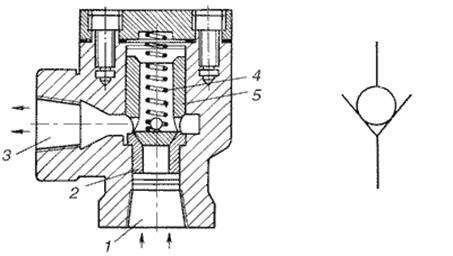
Рис.6.6. Обратный клапан типа Г51: а - конструкция; б - условное обозначение
Обратный клапан Г51 (рис.6.6) имеет конусный запорно-регулирующий элемент 5. При подводе рабочей жидкости к отверстию 1 запорно-регулирующий элемент 5 поднимается над седлом 2, преодолевая силу натяжения пружины 4. Жидкость свободно проходит к отверстию 3. При изменении направления потока рабочей жидкости запорно- регулирующий элемент 5 прижат к седлу и блокирует отверстие 1.
В гидросистемах многих мобильных машин обратные клапаны с шариковым рабочим органом применяют в блокировочном устройстве резиновых шлангов (рис.6.7).
Блокировочное устройство имеет подпружиненные шарики 1, которые при разъединении трубопроводов блокируют поток. При соединении труб путем навинчивания гайки 2 на штуцер 4 толкатель 3 отжимает шарики от их седел, позволяя жидкости свободно проходить через устройство.
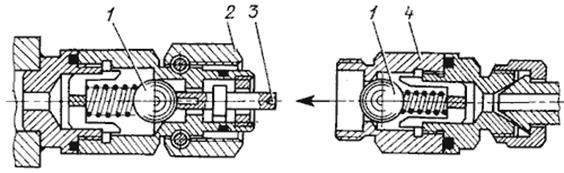
Рис.6.7. Блокировочное устройство
В гидроприводе обратные клапаны применяют: как подпорные; для создания нерегулируемого противодавления в сливной магистрали гидродвигателя; для блокировки вертикально расположенного поршня от самопроизвольного опускания при выключенном приводе; для неуправляемого пропуска рабочей жидкости в одном направлении и управляемого в другом (совместно с дросселем); для исключения утечек жидкости из гидросистемы при демонтаже и т.д. Как конструктивный элемент обратный клапан включен в конструкцию разделительных панелей, напорных клапанов, дросселей и регуляторов потока, в золотники с гидравлическим управлением, в насосы и гидравлические двигатели, в гидрозамки и т.д.
6.5. Ограничители расхода
Ограничителем расхода называется клапан, предназначенный для ограничения расхода в гидросистеме или на каком-либо ее участке.
Принципиальная схема ограничителя расхода приведена на рис.6.8, а. Он состоит из подвижного поршня 3 и нерегулируемой пружины 6, помещенных внутри корпуса 7. В поршне имеется калибровочное отверстие 2 (нерегулируемый дроссель), а корпусе - окна 4. В сочетании с поршнем 3 окна 4 представляют собой регулируемый дроссель. В исходном положении пружина стремится передвинуть поршень в крайнее левое положение и открыть окна 4. При включении ограничителя расхода в гидросистему жидкость поступает в отверстие 1 и далее проходит через дроссель 2 и окна 4 к отверстию 5. При достижении жидкости через ограничитель расхода у дросселя 2 создается перепад давлений. При увеличении расхода перепад давлений увеличивается и поршень перемещается вправо, частично или полностью перекрывая окна 4. Когда расход в гидросистеме уменьшится, перепад давлений также уменьшится и поршень переместится влево, увеличив открытие окон.
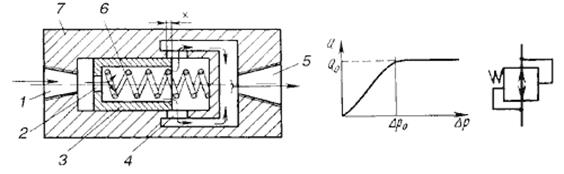
Рис.6.8. Ограничитель расхода:
а - принципиальная схема; б - зависимость Q=f(ΔP); в - условное обозначение
6.6. Делители (сумматоры) потока
Делителем потока называется клапан соотношения расходов, предназначенный для разделения одного потока рабочей жидкости на два и более равных потока независимо от величины противодавления в каждом из них. Делители потока применяют в гидроприводах машин, в которых требуется обеспечить синхронизацию движения выходных звеньев параллельно работающих гидродвигателей, преодолевающих неодинаковую нагрузку.
Делитель потока (рис.6.9) состоит из двух нерегулируемых дросселей 1 и двух дросселей 2, проходные сечения которых могут автоматически изменяться благодаря перемещению плунжера 3. При равенстве нагрузок (F1 = F2) и площадей поршней гидроцилиндров давление P1 = P2 , перепад давлений ΔP = (P3 - P4) = 0, плунжер 3 делителя занимает среднее положение, а расходы в обеих линиях одинаковые. Если нагрузка на один из любых гидродвигателей изменится, то под действием возникшего перепада давлений у плунжера делителя он начнет смещаться из среднего положения, изменяя одновременно проходные сечения дросселей 2. Перемещение прекратится, когда давления P3 и P4 выровняются. В этом положении плунжера расходы в обеих ветвях будут одинаковыми. Таким образом, поддержание равенства расходов в обеих ветвях осуществляется за счет дросселирования потока в той ветви, где гидродвигатель нагружен меньше.
Делитель потока может также быть и сумматором потока (рис.6.9, в). В этом случае в подводимых к нему двух трубопроводах поддерживается постоянный расход рабочей жидкости.
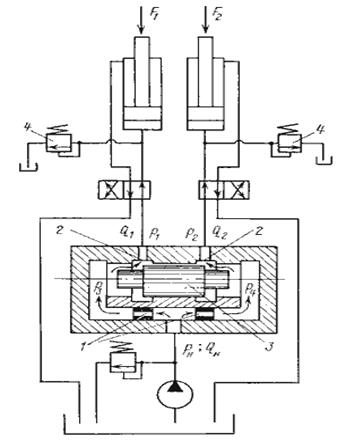
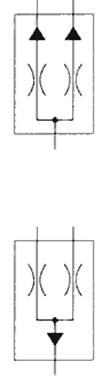
Рис.6.9. Делитель потока: а - принципиальная схема; б - условное обозначение; в - условное обозначение сумматора потока
6.7. Дроссели и регуляторы расхода
Дроссели и регуляторы расхода предназначены для регулирования расхода рабочей жидкости в гидросистеме или на отдельных ее участках и связанного с этим регулирования скорости движения выходного звена гидродвигателя. Дроссели выполняются по двум принципиальным схемам.
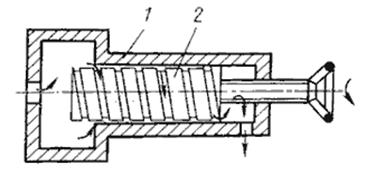
Рис.6.10. Линейный дроссель: 1 - корпус; 2 – винт
Линейные дроссели, в которых потери давления пропорциональны расходу жидкости. В таких дросселях потери давления определяются потерями давления по длине. Изменяя длину канала, по которому движется жидкость, можно изменить потери давления и расход через дроссель. Примером линейного дросселя служит гидроаппарат с дроссельным каналом (рис.6.10).
В этом дросселе жидкость движется по винтовой прямоугольной канавке, длину которой можно изменять поворотом винта. Площадь живого сечения и длину канала устанавливают из условия получения в дросселе требуемого перепада давлений и исключения засоряемости канала механическими примесями, содержащимися в рабочей жидкости. В таких дросселях за счет увеличения длины канала можно увеличить площадь его живого сечения, исключив тем самым засорения дросселя во время его работы.
Нелинейные дроссели характеризуются тем, что режим движения жидкости через них турбулентный, а перепад давлений практически пропорционален квадрату расхода жидкости, поэтому такие дроссели часто называют квадратичными. В них потери давления определяются деформацией потока жидкости и вихреобразованиями, вызванными местными сопротивлениями. Изменение перепада давления, а, следовательно, и изменение расхода жидкости через такие дроссели достигается изменением или площади проходного сечения, или числа местных сопротивлений.
В регулируемых (рис.6.11, а, б, в, г) и нерегулируемых (рис.6.11, д, е) нелинейных дросселях длина пути движения жидкости сведена к минимуму, благодаря чему потери давления и расход практически не зависят от вязкости жидкости и изменяются только при изменении площади рабочего проходного сечения. Максимальную площадь устанавливают из условия пропуска заданного расхода жидкости через полностью открытый дроссель, минимальную - из условия исключения засоряемости рабочего окна.
В пластинчатых дросселях (рис.6.11, е) сопротивление зависит от диаметра отверстия, которое, однако, можно уменьшить лишь до определенного предела (dmin > 0,5 мм), ограничиваемого засоряемости во время работы такого дросселя. Для получения большого сопротивления применяют пакетные дроссели с рядом последовательно соединенных пластин (рис.6.11, д). В таких дросселях расстояние между пластинами l должно быть не менее (3…5) d, а толщина пластин s не более (0,4…0,5) d.
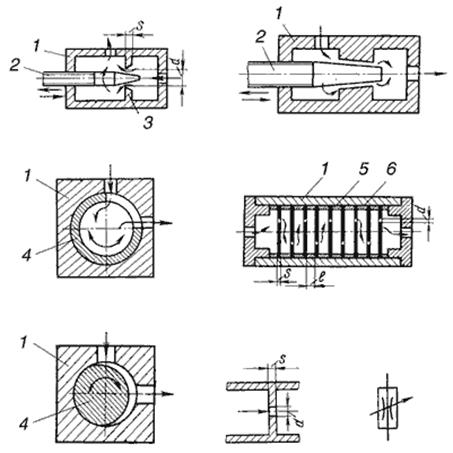
Рис.6.11. Принципиальные схемы нелинейных дросселей: а - игольчатого; б - комбинированного; в - пробкового щелевого; г - пробкового эксцентричного; д - пластинчатого пакетного; е - пластинчатого; ж - условное обозначение регулируемого дросселя;1 - корпус; 2 - игла; 3 - диафрагма; 4 - пробка; 5 - пластина; 6 - втулка
К нелинейным дросселям относятся также и комбинированные дроссели, в которых потери давления по длине и местные потери соизмеримы между собой по величине и в равной мере оказывают влияние на расход жидкости через дроссель (рис.6.11, б). На характеристику комбинированных дросселей влияет вязкость рабочих жидкостей.
Важной характеристикой дросселей является их равномерная и устойчивая работа при малых расходах. Однако устойчивая работа дросселя возможно при уменьшении площади до определенного предела, ниже которого расход становится нестабильным. Это объясняется облитерацией - заращиванием проходного отверстия.
Сущность облитерации заключается в том, что в микронеровностях узких каналов задерживаются и оседают твердые частицы, содержащиеся в рабочей жидкости. Если размеры частиц, загрязняющих жидкость, соизмеримы с размером рабочего окна, то может произойти полное его заращивание и прекращение расхода жидкости через дроссель. При увеличении площади рабочего окна расход жидкости восстанавливается.
Причиной облитерации рабочего окна может быть не только недостаточная очистка рабочей жидкости, но и адсорбция поляризованных молекул рабочей жидкости на стенках щели. Адсорбируемые молекулы образуют многорядный слой, толщина которого может достигать 10 мкм. Этот слой способен сопротивляться значительным нормальным и сдвигающим нагрузкам. В конечном итоге происходит постепенное уменьшение площади живого сечения рабочего окна, а при малых значениях и полное его заращивание. Соответственно уменьшается до нуля и расход жидкости через дроссель. При страгивании с места запорного элемента дросселя адсорбционный слой молекул разрушается, а первоначальный расход восстанавливается.
Поэтому, чтобы добиться малого расхода в ответственных гидросистемах, применяют специальные конструкции дросселей. В таких дросселях рабочему органу (игле, пробке, диафрагме и т.д.) сообщаются непрерывные вращательные или осциллирующие движения. Благодаря этим движениям на рабочей поверхности проходного окна дросселя не образуется слоя адсорбированных молекул и не происходит заращивание щели.
Недостатком дросселей является неравномерность расхода, вызванная изменением перепада давлений у дросселя.
Для частичного или полного устранения неравномерности расхода применяют регуляторы расхода, в которых перепад давлений в дросселе ΔP во время его работы поддерживается примерно постоянным. Конструктивно этот аппарат состоит из последовательно включенных редукционного клапана и дросселя.
При работе гидропривода вследствие изменения коэффициента расхода μ, вызванного колебаниями температры рабочей жидкости, расход через регулятор все же изменяется. Для серийных конструкций регуляторов это изменение составляет 10…12%.
Перспективы развития
Перспективы развития гидропривода во многом связаны с развитием электроники. Так, совершенствование электронных систем позволяет упростить управление движением выходных звеньев гидропривода. В частности, в последние 10-15 лет стали появляться бульдозеры, управление которыми устроено по принципу джойстика.
С развитием электроники и вычислительных средств связан прогресс в области диагностирования гидропривода. Процесс диагностирования некоторых современных машин простыми словами может быть описан следующим образом. Специалист подключает переносной компьютер к специальному разъёму на машине. Через этот разъём в компьютер поступает информация о значениях диагностических параметров от множества датчиков, встроенных в гидросистему. Программа или специалист анализирует полученные данные и выдаёт заключение о техническом состоянии машины, наличии или отсутствии неисправностей и их локализации. По такой схеме осуществляется диагностирование, например, некоторых современных ковшовых погрузчиков. Развитие вычислительных средств позволит усовершенствовать процесс диагностирования гидропривода и машин в целом.
Важную роль в развитии гидропривода может сыграть создание и внедрение новых конструкци-онных материалов. В частности, развитие нанотехнологий позволит повысить прочность материалов, что позволит уменьшить массу гидроборудования и его геометрические размеры, повысить его надёжность. С другой стороны, создание прочных и одновременно эластичных материалов позволит, например, уменьшить недостатки многих гидравлических машин, в частности, увеличить развиваемое диафрагменными насосами давление.
В последние годы наблюдается существенный прогресс в производстве уплотнительных устройств. Новые материалы обеспечивают полную герметичность при давлениях до 80 МПа, низкие коэффициенты трения и высокую надёжность [1].
Литература
1. Гидравлика, гидромашины и гидроприводы: Учебник для машиностроительных вузов/ Т. М. Башта, С. С. Руднев, Б. Б. Некрасов и др. — 2-е изд., перераб. — М.: Машиностроение, 1982.
2. Гейер В. Г., Дулин В. С., Заря А. Н. Гидравлика и гидропривод: Учеб для вузов. — 3-е изд., перераб. и доп. — М.: Недра, 1991.
3. Юфин А. П. Гидравлика, гидравлические машины и гидропривод. — М.: Высшая школа, 1965.
4. Алексеева Т. В. Гидропривод и гидроавтоматика землеройно-транспортных машин. М., «Машиностроение», 1966. 140 с.
5. Т. М. Башта Гидравлические приводы летательных аппаратов. Издание 4-е, переработанное и дополненное. Изд-во «Машиностроение», Москва 1967 г.
6. Лепешкин А. В., Михайлин А. А., Шейпак А. А. Гидравлика и гидропневмопривод: Учебник, ч.2. Гидравлические машины и гидропневмопривод. / под ред. А. А. Шейпака. — М.: МГИУ, 2003. — 352 с.
7. Схиртладзе А. Г., Иванов В. И., Кареев В. Н. Гидравлические и пневматические системы. — Издание 2-е, дополненное. М.: ИЦ МГТУ «Станкин», «Янус-К», 2003 г. — 544 с.
8. Подлипенский Виктор Семёнович. Гидро- и пневмоавтоматика.
Пневматический привод
Пневматический привод (пневмопривод) — совокупность устройств, предназначенных для приведения в движение машин и механизмов посредством энергии сжатого воздуха. Обязательными элементами пневмопривода являются компрессор (генератор пневматической энергии) и пневмодвигатель.
Пневмопривод, подобно гидроприводу, представляет собой своего рода «пневматическую вставку» между приводным двигателем и нагрузкой (машиной или механизмом) и выполняет те же функции, что и механическая передача (редуктор, ремённая передача, кривошипно-шатунный механизм и т. д.).
Основное назначение пневмопривода, как и механической передачи, — преобразование механической характеристики приводного двигателя в соответствии с требованиями нагрузки (преобразование вида движения выходного звена двигателя, его параметров, а также регулирование, защита от перегрузок и др.).
В общих чертах, передача энергии в пневмоприводе происходит следующим образом:
приводной двигатель передаёт вращающий момент на вал компрессора, который сообщает энергию рабочему газу.
Рабочий газ после специальной подготовки по пневмолиниям через регулирующую аппаратуру поступает в пневмодвигатель, где пневматическая энергия преобразуется в механическую.
После этого рабочий газ выбрасывается в окружающую среду, в отличие от гидропривода, в котором рабочая жидкость по гидролиниям возвращается либо в гидробак, либо непосредственно к насосу.
В зависимости от характера движения выходного звена пневмодвигателя (вала пневмомотора или штока пневмоцилиндра), и соответственно, характера движения рабочего органа пневмопривод может быть вращательным или поступательным. Пневмоприводы с поступательным движением получили наибольшее распространение в технике.
Типовая схема пневмопривода
Воздух в пневмосистему поступает через воздухозаборник.
Фильтр осуществляет очистку воздуха в целях предупреждения повреждения элементов привода и уменьшения их износа.
Компрессор осуществляет сжатие воздуха.
Поскольку сжатый в компрессоре воздух имеет высокую температуру, то перед подачей воздуха потребителям (как правило, пневмодвигателям) воздух охлаждают в теплообменнике (в холодильнике).
Чтобы предотвратить обледенение пневмодвигателей вследствие расширения в них воздуха, а также для уменьшения коррозии деталей, в пневмосистеме устанавливают влагоотделитель.
Воздухосборник служит для создания запаса сжатого воздуха, а также для сглаживания пульсаций давления в пневмосистеме. Эти пульсации обусловлены принципом работы объёмных компрессоров (например, поршневых), подающих воздух в систему порциями.
В маслораспылителе в сжатый воздух добавляется смазка, благодаря чему уменьшается трение между подвижными деталями пневмопривода и предотвращает их заклинивание.
В пневмоприводе обязательно устанавливается редукционный клапан, обеспечивающий подачу к пневмодвигателям сжатого воздуха при постоянном давлении.
Распределитель управляет движением выходных звеньев пневмодвигателя.
В пневмодвигателе (пневмомоторе или пневмоцилиндре) энергия сжатого воздуха преобразуется в механическую энергию.
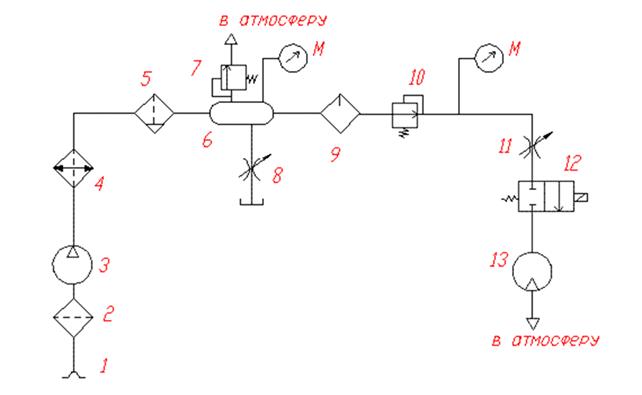
Типовая схема пневмопривода: 1 — воздухозаборник; 2 — фильтр; 3 — компрессор; 4 — теплообменник (холодильник); 5 — влагоотделитель; 6 — воздухосборник (ресивер); 7 — предохранительный клапан; 8- Дроссель; 9 — маслораспылитель; 10 — редукционный клапан; 11 — дроссель; 12 — распределитель; 13 пневмомотор; М — манометр.
Любой объект, в котором используется газообразное вещество, можно отнести к газовым системам. Поскольку наиболее доступным газом является воздух, состоящий из смеси множества газов, то его широкое применение для выполнения различных процессов обусловлено самой природой. В переводе с греческого pneumatikos - воздушный, чем и объясняется этимологическое происхождение названия пневматические системы. В технической литературе часто используется более краткий термин - пневматика.
Пневматические устройства начали применять еще в глубокой древности (ветряные двигатели, музыкальные инструменты, кузнечные меха и пр.), но самое широкое распространение они получили вследствие создания надежных источников пневматической энергии - нагнетателей, способных придавать газам необходимый запас потенциальной и (или) кинетической энергии.
Пневматический привод, состоящий из комплекса устройств для приведения в действие машин и механизмов, является далеко не единственным направлением использования воздуха (в общем случае газа) в технике и жизнедеятельности человека. В подтверждение этого положения кратко рассмотрим основные виды пневматических систем, отличающихся как по назначению, так и по способу использования газообразного вещества.
По наличию и причине движения газа все системы можно разделить на три группы.
К первой группе отнесем системы с естественной конвекцией (циркуляцией) газа (чаще всего воздуха), где движение и его направление обусловлено градиентами температуры и плотности природного характера, например, атмосферная оболочка планеты, вентиляционные системы помещений, горных выработок, газоходов и т.п.
Ко второй группе отнесем системы с замкнутыми камерами, не сообщающимися с атмосферой, в которых может изменяться состояние газа вследствие изменения температуры, объема камеры, наддува или отсасывания газа. К ним относятся различные аккумулирующие емкости (пневмобаллоны), пневматические тормозные устройства (пневмобуферы), всевозможные эластичные надувные устройства, пневмогидравлические системы топливных баков летательных аппаратов и многие другие. Примером устройств с использованием вакуума в замкнутой камере могут быть пневмозахваты (пневмоприсоски), которые наиболее эффективны для перемещения штучных листовых изделий (бумага, металл, пластмасса и т.п.) в условиях автоматизированного и роботизированного производства.
К третьей группе следует отнести такие системы, где используется энергия предварительно сжатого газа для выполнения различных работ. В таких системах газ перемещается по магистралям с относитель-но большой скоростью и обладает значительным запасом энергии. Они могут быть циркуляционными(замкнутыми) и бесциркуляционными. В циркуляционных системах отработавший газ возвращается по магистралям к нагнетателю для повторного использования (как в гидроприводе). Применение систем весьма специфично, например, когда недопустимы утечки газа в окружающее пространство или невозможно применение воздуха из-за его окислительных свойств. Примеры таких систем можно найти в криогенной технике, где в качестве энергоносителя используются агрессивные, токсичные газы или летучие жидкости (аммиак, пропан, сероводород, гелий, фреоны и др.).
В бесциркуляционных системах газ может быть использован потребителем как химический реагент (например, в сварочном производстве, в химической промыш-ленности) или как источник пневматической энергии. В последнем случае в качестве энергоносителя обычно служит воздух.
Выделяют три основных направления применения сжатого воздуха.
К первому направлению относятся технологические процессы, где воздух выполняет непосредственно операции обдувки, осушки, распыления, охлаждения, вентиляции, очистки и т.п. Очень широкое распространение получили системы пневмотранспортирования по трубопроводам, особенно в легкой, пищевой, горнодобывающей отраслях промышленности. Штучные и кусковые материалы транспортируются в специальных сосудах (капсулах), а пылевидные в смеси с воздухом перемещаются на относительно большие расстояния аналогично текучим веществам.
Второе направление - использование сжатого воздуха в пневматических системах управления (ПСУ) для автоматического управления технологическими процессами (системы пневмоавтоматики). Это направление получило интенсивное развитие с 60-х годов благодаря созданию универсальной системы элементов промышленной пневмо-автоматики (УСЭППА). Широкая номенклатура УСЭППА (пневматические датчики, переключатели, преобразователи, реле, логические элементы, усилители, струйные устройства, командоаппараты и т.д.) позволяет реализовать на ее базе релейные, анало-говые и аналого-релейные схемы, которые по своим параметрам близки к электротехни-ческим системам. Благодаря высокой надежности они широко используются для цикло-вого программного управления различными машинами, роботами в крупносерийном производстве, в системах управления движением мобильных объектов.
Третьим направлением применения пневмоэнергии, наиболее масштабным по мощности, является пневматический привод, который в научном плане является одним из разделов обшей механики машин. У истоков теории пневматических систем стоял И.И. Артоболевский. Он был руководителем Института машиноведения (ИМАШ) в Ленинграде, где под его руководством в 40 - 60-х годах систематизировались и обобщались накопленные сведения по теории и проектированию пневмосистем. Одной из первых работ по теории пневмосистем была статья А.П. Германа "Применение сжатого воздуха в горном деле", опубликованная в 1933 г., где впервые движение рабочего органа пневмоустройства решается совместно с термодинамическим уравнением состояния параметров воздуха.
Значительный вклад в теорию и практику пневмоприводов внесли ученые Б.Н. Бежанов, К.С. Борисенко, И.А. Бухарин, А.И. Вощинин, Е.В. Герц, Г.В. Крейнии, А.И. Кудрявцев, В.А. Марутов, В.И. Мостков, Ю.А. Цейтлин и другие.
11.4. Подготовка сжатого воздуха
В промышленности используются различные конструкции машин для подачи воздуха под общим названием воздуходувки. При создании избыточного давления до 0,015 МПа они называются вентиляторами, а при давлении свыше 0,115 МПа - компрессорами.
Вентиляторы относятся к лопастным машинам динамического действия и кроме своего основного назначения - проветривания - применяются в пневмотранспортных системах и низконапорных системах пневмоавтоматики.
В пневмоприводах источником энергии служат компрессоры с рабочим давлением в диапазоне 0,4…1,0 МПа. Они могут быть объемного (чаще поршневые) или динамического (лопастные) действия. Теория работы компрессоров изучается в специальных дисциплинах.
По виду источника и способу доставки пневмоэнергии различают магистральный, компрессорный и аккумуляторный пневмопривод.
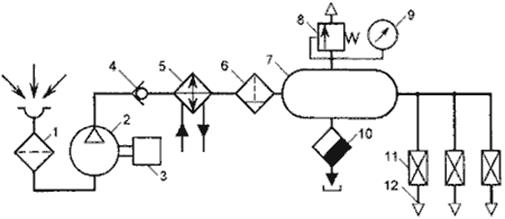
Рис.11.3. Принципиальная схема компрессорной станции
Магистральный пневмопривод характеризуется разветвленной сетью стационарных пневмолиний, соединяющих компрессорную станцию с цеховыми, участковыми потребителями в пределах одного или нескольких предприятий. Компрессорная станция оборудуется несколькими компрессорными линиями, обеспечивающими гарантированное снабжение потребителей сжатого воздуха с учетом возможной неравномерной работы последних. Это достигается установкой промежуточных накопителей пневмоэнергии (ресиверов) как на самой станции, так и на участках. Пневмолинии обычно резервируются, чем обеспечивается удобство их обслуживания и ремонта. Типовой комплект устройств, входящих в систему подготовки воздуха, показан на принципиальной схеме компрессорной станции (рис.11.3).
Компрессор 2 с приводным двигателем 3 всасывает воздух из атмосферы через заборный фильтр 1 и нагнетает в ресивер 7 через обратный клапан 4, охладитель 5 и фильтр-влагоотделитель 6. В результате охлаждения воздуха водяным охладителем 5 происходит конденсация 70-80 % содержащейся в воздухе влаги, улавливаемой фильтром- влагоотделителем и со 100-процентной относительной влажностью воздух поступает в ресивер 7, который аккумулирует пневмоэнергию и сглаживает пульсацию давления. В нем происходит дальнейшее охлаждение воздуха и конденсация некоторого количества влаги, которая по мере накопления удаляется вместе с механическими примесями через вентиль 10. Ресивер обязательно оборудуется одним или несколькими предохранительными клапанами 8 и манометром 9. Из ресивера воздух отводится к пневмолиниям 12 через краны 11. Обратный клапан 4 исключает возможность резкого падения давления в пневмосети при отключении компрессора.
Компрессорный пневмопривод отличается от вышеописанного магистрального своей мобильностью и ограниченностью числа одновременно работающих потребителей. Передвижные компрессоры наиболее широко используются при выполнении различных видов строительных и ремонтных работ. По комплекту устройств, входящих в систему подготовки воздуха, он практически не отличается от вышеописанной компрессорной станции (водяной охладитель заменяется на воздушный). Подача воздуха к потребителям осуществляется через резинотканевые рукава.
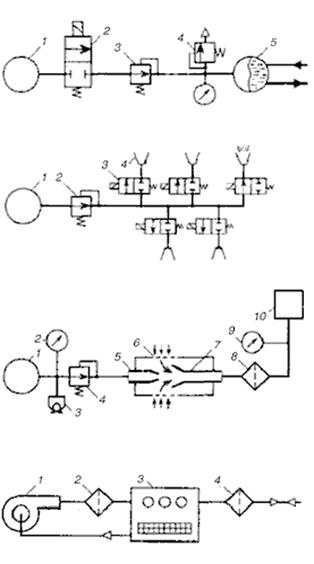
Рис.11.4. Принципиальные схемы аккумуляторного питания пневмосистем (а, б, в) и замкнутой пневмосистемы (г)
Аккумуляторный пневмопривод ввиду ограниченного запаса сжатого воздуха в промышленности применяется редко, но широко используется в автономных системах управления механизмов с заданным временем действия. На рис.11.4 показаны несколько примеров аккумуляторного питания пневмосистем.
Для бесперебойной подачи жидкости в гидросистему или топлива в двигатели внутреннего сгорания аппаратов с переменной ориентацией в пространстве применяется наддув бака с жидкостью (рис.11.4, а) от пневмобаллона 1.
Вытеснение жидкости из бака 5, разделенного мембраной на две части, обеспечивается постоянным давлением воздуха, зависящим от настройки редукционного клапана 3 при включении электровентиля 2. Предельное давление ограничивается клапаном 4.
Система ориентации летательного аппарата (рис.11.4, б) состоит из управляющих реактивных пневмодвигателей 4, питающихся от шарового пневмобаллона 1 через редукционный клапан 2 и электровентили 3.
Для питания систем промышленной пневмоавтоматики часто используется не только средний (нормальный) диапазон давления воздуха (0,118…0,175 МПа), а и низкий диапазон (0,0012…0,005 МПа). Это позволяет уменьшить расход сжатого воздуха, увеличить проходное сечение элементов и, следовательно, снизить вероятность засорения дросселирующих устройств, а в некоторых случаях получить ламинарный режим течения воздуха с линейной зависимостью Q = f(Δp), что весьма важно в устройствах пневмоавтоматики.
При наличии источника высокого давления можно обеспечить питание пневмосистемы низкого давления с большим расходом воздуха при помощи эжектора (рис.11.4, в). От пневмобаллона высокого давления 1, оборудованного редукционным клапаном 4, манометром 2 и зарядным клапаном 3 воздух поступает на питающее сопло 5 эжектора. При этом внутри корпуса эжектора создается пониженное давление, и из окружающей среды через фильтр 6 подсасывается воздух, который поступает в приемное сопло 7 большего диаметра. После эжектора воздух вторично очищается от пыли фильтром 8 и поступает к устройствам 10 пневмоавтоматики. Манометром 9 контролируется рабочее давление, величина которого может корректироваться редуктором 4.
Все вышеописанные пневмосистемы относятся к разомкнутым (бесциркуляционным). На рис.11.4, г показана замкнутая схема питания системы пневмоавтоматики, используемая в условиях пыльной атмосферы. Подача воздуха к блоку пневмоавтоматики 3 осуществляется вентилятором 1 через фильтр 2, причем всасывающий канал вентилятора соединен с внутренней полостью герметичного кожуха блока 3, которая одновременно через фильтр тонкой очистки 4 сообщается с атмосферой. Часто в качестве вентилятора используются бытовые электропылесосы, способные создавать давление до 0,002 МПа.
Воздух, поступающий к потребителям, должен быть очищен от механических загрязнений и содержать минимум влаги. Для этого служат фильтры-влагоотделители, у которых в качестве фильтрующего элемента обычно используется ткань, картон, войлок, металлокерамика и другие пористые материалы с тонкостью фильтрации от 5 до 60 мкм. Для более глубокой осушки воздуха его пропускают через адсорбенты, поглощающие влагу. Чаще всего для этого используется силикагель. В обычных пневмоприводах достаточную осушку обеспечивают ресиверы и фильтры- влагоотделители, но вместе с тем воздуху необходимо придавать смазочные свойства, для чего служат маслораспылители фитильного или эжекторного типа.
На рис.11.5 показан типовой узел подготовки воздуха, состоящий из фильтра-влагоотделителя 1, редукционного клапана 2 и маслораспылителя 3.
Поступающий на вход фильтра воздух получает вращательное движение за счет неподвижной крыльчатки Kр. Центробежной силой частицы влаги и механических примесей отбрасываются к стенке прозрачного корпуса и оседают в его нижнюю часть, откуда по мере необходимости удаляются через сливной кран. Вторичная очистка воздуха происходит в пористом фильтре Ф, после которого он поступает на вход редуктора, где происходит дросселирование через зазор клапана Кл, величина которого зависит от выходного давления над мембраной М. Увеличение усилия сжатия пружины П обеспечивает увеличение зазора клапана Кл и, следовательно, выходного давления. Корпус маслораспылителя 3 делается прозрачным и заполняется через пробку смазочным маслом. Создаваемое на поверхности масла давление вытесняет его через трубку T вверх к соплу С, где масло эжектируется и распыляется потоком воздуха. В маслораспылителях фитильного типа вместо трубки Т установлен фитиль, по которому масло поступает в распылительное сопло за счет капиллярного эффекта.
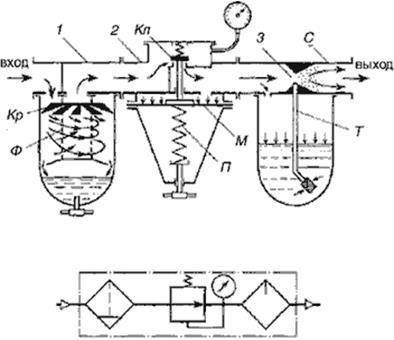
Рис.11.5. Типовой узел подготовки воздуха: а - принципиальная схема; б - условное обозначение
11.5. Исполнительные пневматические устройства
Исполнительными устройствами пневмоприводов называются различные механизмы, обеспечивающие преобразование избыточного давления воздуха или вакуума в рабочее усилие. Если при этом рабочий орган совершает движение относительно пневмоустройства, то он называется пневмодвигателем, а если движения нет или оно происходит совместно с пневмоустройством, то оно называется пневмоприжимом или пневмозахватом.
Пневмодвигатели могут быть, как и гидродвигатели, вращательного или поступательного действия и называются, соответственно, пневмомоторами и пневмоцилиндрами. Конструктивное исполнение этих устройств во многом похоже на их гидравлические аналоги. Наибольшее применение получили шестеренные, пластинчатые и радиально-поршневые пневмомоторы объемного действия. На рис.11.6, а показана схема радиально- поршневого мотора с передачей крутящего момента на вал через кривошипно-шатунный механизм.
В корпусе 1 симметрично расположены цилиндры 2 с поршнями 3. Усилие от поршней передается на коленчатый вал 5 через шатуны 4, прикрепленные шарнирно к поршням и кривошипу коленчатого вала. Сжатый воздух подводится к рабочим камерам по каналам 8, которые поочередно сообщаются с впускным Вп и выхлопным Вх каналами распределительного золотника 6, вращающегося синхронно с валом мотора. Золотник вращается в корпусе распределительного устройства 7, к которому подведены магистрали впуска и выхлопа воздуха.
Радиально-поршневые пневмомоторы являются относительно тихоходными машинами с частотой вращения вала до 1000…1500 об/мин. Более быстроходны шестеренные и пластинчатые моторы (2000…4000 об/мин), но самыми быстроходными (до 20000 об/мин и более) могут быть турбинные пневмомоторы, в которых используется кинетическая энергия потока сжатого воздуха. В частности, такие моторы используются для вращения рабочих колес вентиляторов на горных предприятиях.
На рис.11.6, б показана схема пневмопривода колеса вентилятора, состоящего из ступицы 9 и лопаток 10, к которым жестко прикреплен вращающийся обод с лопатками пневмомотора 11. Поток сжатого воздуха, вытекающий из сопла 12 по касательной к изогнутым лопаткам 11, отдает свою энергию и заставляет вращаться колесо вентилятора с большой скоростью. Описанное устройство можно назвать пневмопреобразователем, преобразующим поток воздуха высокого давления в поток низкого давления с гораздо большим расходом.
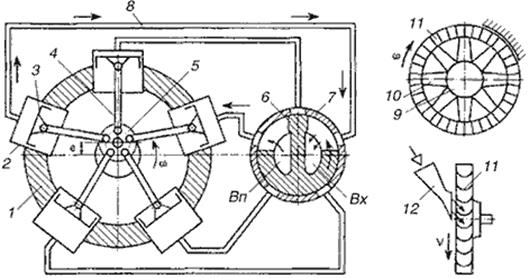
Рис.11.6. Схемы пневмомоторов объемного (а) и динамического (б) действия
Пневмопривод отличается большим разнообразием оригинальных исполнительных устройств с эластичными элементами в форме мембран, оболочек, гибких нитей, рукавов и т.н. Они широко используются в зажимных, фиксирующих, переключающих и тормозных механизмах современных автоматизированных производств. К ним относятся мембранные и сильфонные пневмоцилиндры с относительно малой величиной рабочего хода штока. Плоская резиновая мембрана позволяет получить перемещение штока на 0,1...0,5 от ее эффективного диаметра. При выполнении мембраны в форме гофрированного чулка рабочий ход увеличивается до нескольких диаметров мембраны. Такие пневмоцилиндры называются сильфонными. Они могут быть с внешним и внутренним подводом воздуха. В первом случае длина гофрированной трубки под действием давления уменьшается, во втором увеличивается за счет деформации гофров. В качестве эластичного элемента применяется резина, резинотканевые и синтетические материалы, а также тонколистовая сталь, бронза, латунь.
Увеличение скорости выполнения операций во многих случаях достигается применением пневмозахватов, схемы которых показаны на рис.11.7.
Для перемещения листовых изделий используются пневмоприсоски, относящиеся к вакуумным захватам безнасосного и насосного типа. В захватах безнасосного типа (рис.11.7, а) вакуум в рабочей камере К создается при деформации самих элементов захвата, выполненных в виде гибкой тарелки, прилегающей своей кромкой к детали и подвижным поршнем, к которому прикладывается внешнее усилие. Величина вакуума при подъеме детали пропорциональна ее весу и обычно бывает не более 55 кПа. Для обеспечения лучшего притяжения, особенно для недостаточно гладкой поверхности детали, применяют захваты насосного типа, у которых воздух из рабочей камеры отсасывается насосом до глубины вакуума 70…95 кПа.
Часто применяют простые устройства эжекторного типа (рис.11.7, б), в которых кинетическая энергия струи жидкости, пара или воздуха используется для отсасывания воздуха из рабочей камеры К, находящейся между присоской П и деталью. Сжатый воздух, поступающий на вход А, проходит с большой скоростью через сопло Б эжектора и создает пониженное давление в камере В и канале Г, сообщающимся с рабочей камерой К. Для зажима деталей цилиндрической формы применяют пневмозахваты, выполненные по схемам в и г (рис.11.7). При подводе воздуха в рабочую камеру К упругий цилиндрический колпачок охватывает шейку вала и создает усилие, достаточное для его зажима. На схеме г показан двухсторонний пневмозахват, рабочими элементами которого служат сильфоны с односторонним гофром.
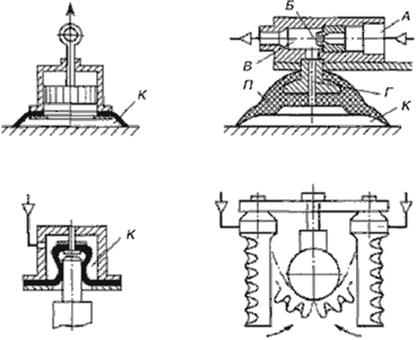
Рис.11.7. Схемы пневмозахватов
При создании избыточного давления внутри сильфона гофрированная сторона растягивается на большую длину, чем гладкая, что вызывает перемещение незакрепленной (консольной) стороны трубки в направлении охватываемой детали. Такими устройствами можно фиксировать детали не только круглой формы, но и с любыми фасонными поверхностями.
В ряде случаев возникает потребность в перемещении рабочих органов на большие расстояния до 10…20 м и более по прямолинейной или искривленной траектории. Применение обычных штоковых пневмоцилиндров ограничено рабочим ходом до 2 м. Конструкции бесштоковых пневмоцилиндров, удовлетворяющих этим требованиям, показаны на рис.11.8.
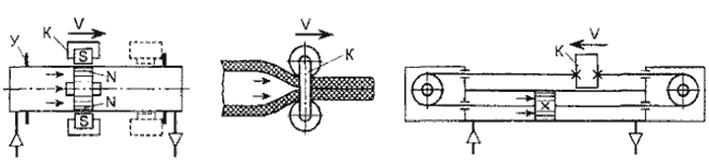
Рис.11.8. Схемы бесштоковых пневмодвигателей поступательного движения
Отсутствие жесткого штока позволяет практически в два раза уменьшить длину цилиндра в выдвинутом положении. На схеме а показан длинноходовой пневмоцилиндр с передачей усилия через сильный постоянный магнит. Абсолютно герметичная гильза цилиндра выполнена из немагнитного материала, а ее внутренняя полость разделяется поршнем на две камеры, к которым подводится сжатый воздух. В поршне и каретке К, соединенной с рабочим органом, встроены противоположные полюса магнита S и N, взаимодействие которых обеспечивает передачу движущего усилия на каретку, скользящую по направляющим на внешней поверхности гильзы. Ход каретки ограничивается конечными упорами У.
Практически неограниченную длину хода имеют пневмоцилиндры с эластичной гильзой (рис.11.8, б), охватываемой двумя роликами, соединенными кареткой К. Такие пневмоцилиндры очень эффективны для перемещения штучных грузов по сложной траектории и в приводах с небольшими рабочими усилиями.
Пневмоцилиндр с гибким штоком показан на схеме рис.11.8, в. В такой конструкции тяговое усилие передается на каретку К от поршня через гибкий элемент (обычно стальной трос, облицованный эластичной пластмассой), охватывающий обводной и натяжной ролики, расположенные на крышках цилиндра.
Особенности пневматического привода, достоинства и недостатки
Область и масштабы применения пневматического привода обусловлены его достоинствами и недостатками, вытекающими из особенностей свойств воздуха. В отличие от жидкостей, применяемых в гидроприводах, воздух, как и все газы, обладает высокой сжимаемостью и малой плотностью в исходном атмосферном состоянии (около 1,25 кг/м 3), значительно меньшей вязкостью и большей текучестью, причем его вязкость существенно возрастает при повышении температуры и давления. Отсутствие смазочных свойств воздуха и наличие некоторого количества водяного пара, который при интенсивных термодинамических процессах в изменяющихся объемах рабочих камер пневмомашин может конденсироваться на их рабочих поверхностях, препятствует использованию воздуха без придания ему дополнительных смазочных свойств и влагопонижения. В связи с этим в пневмоприводах имеется потребность кондиционирования воздуха, т.е. придания ему свойств, обеспечивающих работоспособность и продляющих срок службы элементов привода.
С учетом вышеописанных отличительных особенностей воздуха рассмотрим достоинства пневмопривода в сравнении с его конкурентами - гидро- и электроприводом.
1. Простота конструкции и технического обслуживания. Изготовление деталей пневмомашин и пневмоаппаратов не требует такой высокой точности изготовления и герметизации соединений, как в гидроприводе, т.к. возможные утечки воздуха не столь существенно снижают эффективность работы и КПД системы. Внешние утечки воздуха экологически безвредны и относительно легко устраняются. Затраты на монтаж и обслуживание пневмопривода несколько меньше из-за отсутствия возвратных пневмолиний и применения в ряде случаев более гибких и дешевых пластмассовых или резиновых (резинотканевых) труб. В этом отношении пневмопривод не уступает электроприводу. Кроме того, пневмопривод не требует специальных материалов для изготовления деталей, таких как медь, алюминий и т.п., хотя в ряде случаев они используются исключительно для снижения веса или трения в подвижных элементах.
2. Пожаро- и взрывобезопасность. Благодаря этому достоинству пневмопривод не имеет конкурентов для механизации работ в условиях, опасных по воспламенению и взрыву газа и пыли, например в шахтах с обильным выделением метана, в некоторых химических производствах, на мукомольных предприятиях, т.е. там, где недопустимо искрообразование. Применение гидропривода в этих условиях возможно только при наличии централизованного источника питания с передачей гидроэнергии на относительно большое расстояние, что в большинстве случаев экономически нецелесообразно.
3. Надежность работы в широком диапазоне температур, в условиях пыльной и влажной окружающей среды. В таких условиях гидро- и электропривод требуют значительно больших затрат на эксплуатацию, т.к. при температурных перепадах нарушается герметичность гидросистем из-за изменения зазоров и изолирующих свойств электротенических материалов, что в совокупности с пыльной, влажной и нередко агрессивной окружающей средой приводит к частым отказам. По этой причине пневмопривод является единственным надежным источником энергии для механизации работ в литейном и сварочном производстве, в кузнечно-прессовых цехах, в некоторых производствах по добыче и переработке сырья и др. Благодаря высокой надежности пневмопривод часто используется в тормозных системах мобильных и стационарных машин.
4. Значительно больший срок службы, чем гидро- и электропривода. Срок службы оценивают двумя показателями надежности: гамма-процентной наработкой на отказ и гамма-процентным ресурсом. Для пневматических устройств циклического действия ресурс составляет от 5 до 20 млн. циклов в зависимости от назначения и конструкции, а для устройств нециклического действия около 10-20 тыс. часов. Это в 2 - 4 раза больше, чем у гидропривода, и в 10-20 раз больше, чем у электропривода.
5. Высокое быстродействие. Здесь имеется в виду не скорость передачи сигнала (управляющего воздействия), а реализуемые скорости рабочих движений, обеспечиваемых высоки-ми скоростями движения воздуха. Поступательное движение штока пневмоцилиндра возможно до 15 м/с и более, а частота вращения выходного вала некоторых пневмо-моторов (пневмотурбин) до 100 000 об/мин. Это достоинство в полной мере реализуется в приводах циклического действия, особенно для высокопроизводительного оборудования, например в манипуляторах, прессах, машинах точечной сварки, в тормозных и фиксирующих устройствах, причем увеличение количества одновременно срабатывающих пневмоцилиндров (например в многоместных приспособлениях для зажима деталей) практически не снижает время срабатывания. Большая скорость вращательного движения используется в приводах сепараторов, центрифуг, шлифовальных машин, бормашин и др. Реализация больших скоростей в гидроприводе и электроприводе ограничивается их большей инерционностью (масса жидкости и инерция роторов) и отсутствием демпфирующего эффекта, которым обладает воздух.
6. Возможность передачи пневмоэнергии на относительно большие расстояния по магистральным трубопроводам и снабжение сжатым воздухом многих потребителей. В этом отношении пневмопривод уступает электроприводу, но значительно превосходит гидропривод, благодаря меньшим потерям напора в протяженных магистральных линиях. Электрическая энергия может передаваться по линиям электропередач на многие сотни и тысячи километров без ощутимых потерь, а расстояние передачи пневмоэнергии экономически целесообразно до нескольких десятков километров, что реализуется в пневмосистемах крупных горных и промышленных предприятий с централизованным питанием от компрессорной- станции.
Известен опыт создания городской компрессорной станции в 1888 г. одним из промышленников в Париже. Она снабжала заводы и фабрики по магистралям протяженностью 48 км при давлении 0,6 МПа и имела мощность до 18500 кВт. С появлением надежных электропередач ее эксплуатация стала невыгодной.
Максимальная протяженность гидросистем составляет около 250-300 м в механизированных комплексах шахт для добычи угля, причем в них используется обычно менее вязкая водно-масляная эмульсия.
7. Отсутствие необходимости в защитных устройствах от перегрузки давлением у потребителей. Требуемый предел давления воздуха устанавливается общим предохранительным клапаном, находящимся на источниках пневмоэнергии. Пневмодвигатели могут быть полностью заторможены без опасности повреждения и находиться в этом состоянии длительное время.
8. Безопасность для обслуживающего персонала при соблюдении общих правил, исключающих механический травматизм. В гидро - и электроприводах возможно поражение электрическим током или жидкостью при нарушении изоляции или разгерметизации трубопроводов.
9. Улучшение проветривания рабочего пространства за счет отработанного воздуха. Это свойство особенно полезно в горных выработках и помещениях химических и металлообрабатывающих производств.
10. Нечувствительность к радиационному и электромагнитному излучению. В таких условиях электрогидравлические системы практически непригодны. Это достоинство широко используется в системах управления космической, военной техникой, в атомных реакторах и т.п.
11. В отличие от гидропривода — отсутствие необходимости возвращать рабочее тело (воздух) назад к компрессору;
12. Меньший вес рабочего тела по сравнению с гидроприводом (актуально для ракетостроения);
13. Меньший вес исполнительных устройств по сравнению с электрическими;
14. Возможность упростить систему за счет использования в качестве источника энергии баллона со сжатым газом, такие системы иногда используют вместо пиропатронов, есть системы, где давление в баллоне достигает 500 МПа;
15. Простота и экономичность, обусловленные дешевизной рабочего газа;
16. Быстрота срабатывания и большие частоты вращения пневмомоторов (до нескольких десятков тысяч оборотов в минуту);
Несмотря на вышеописанные достоинства, применяемость пневмопривода ограничивается в основном экономическими соображениями из-за больших потерь энергии в компрессорах и пневмодвигателях, а также других недостатков, описанных ниже.
1. Высокая стоимость пневмоэнергии. Если гидро- и электропривод имеют КПД, соответственно, около 70 % и 90 %, то КПД пневмопривода обычно 5-15 % и очень редко до 30 %. Во многих случаях КПД может быть 1 % и менее. По этой причине пневмо-привод не применяется в машинах с длительным режимом работы и большой мощности, кроме условий, исключающих применение электроэнергии (например, горнодобывающие машины в шахтах, опасных по газу).
2. Относительно большой вес и габариты пневмомашин из-за низкого рабочего давления. Если удельный вес гидромашин, приходящийся на единицу мощности, в 5-10 раз меньше веса электромашин, то пневмомашины имеют примерно такой же вес и габариты, как последние.
3. Трудность обеспечения стабильной скорости движения выходного звена при переменной внешней нагрузке и его фиксации в промежуточном положении. Вместе с тем мягкие механические характеристики пневмопривода в некоторых случаях являются и его достоинством.
4. Высокий уровень шума, достигающий 95-130 дБ при отсутствии средств для его снижения. Наиболее шумными являются поршневые компрессоры и пневмодвигатели, особенно пневмомолоты и другие механизмы ударно- циклического действия. Наиболее шумные гидроприводы (к ним относятся приводы с шестеренными машинами) создают шум на уровне 85-104 дБ, а обычно уровень шума значительно ниже, примерно как у электромашин, что позволяет работать без специальных средств шумопонижения.
5. Малая скорость передачи сигнала (управляющего импульса), что приводит к запаздыванию выполнения операций. Скорость прохождения сигнала равна скорости звука и, в зависимости от давления воздуха, составляет примерно от 150 до 360 м/с. В гидроприводе и электроприводе, соответственно, около 1000 и 300 000 м/с.
6. Нагревание и охлаждение рабочего газа в процессе сжатия в компрессорах и расширения в пневмомоторах; этот недостаток обусловлен законами термодинамики, и приводит к следующим проблемам:
-возможность обмерзания пневмосистем;
-конденсация водяных паров из рабочего газа, и в связи с этим необходимость его осушения;
7. Высокая стоимость пневматической энергии по сравнению с электрической (примерно в 3-4 раза), что важно, например, при использовании пневмопривода в шахтах;
8. Ещё более низкий КПД, чем у гидропривода;
9. Низкие точность срабатывания и плавность хода;
10. Возможность взрывного разрыва трубопроводов или производственного травматизма, из-за чего в промышленном пневмоприводе применяются небольшие давления рабочего газа (обычно давление в пневмосистемах не превышает 1 МПа, хотя известны пневмо-системы с рабочим давлением до 7 МПа — например, на атомных электростанциях), и, как следствие, усилия на рабочих органах значительно ме́ньшие в сравнении с гидроприводом). Там, где такой проблемы нет (на ракетах и самолетах) или размеры систем небольшие, давления могут достигать 20 МПа и даже выше.
11. Для регулирования величины поворота штока привода необходимо использование дорогостоящих устройств — позиционеров.
Перечисленные недостатки могут быть устранены применением комбинированных пневмоэлектрических или пневмогидравлических приводов.
Литература
1. Башта Т.М. Гидропривод и гидропневмоавтоматика. — Москва: Машиностроение, 1972. — С. 320.
2. Схиртладзе А.Г., Иванов В.И., Кареев В.Н. Гидравлические и пневматические системы. — Москва: ИЦ МГТУ «Станкин», «Янус-К», 2003. — С. 544.
3. В. Левин Мускулы из воздуха // Наука и жизнь : журнал. — М.: Правда, 1989. — № 5. — С. 41—45. — ISSN 0028-1263.
Гидромуфты
Гидромуфта представляет собой тип гидродинамической передачи, посредством которой реализуется передача крутящего момента с одного вала на другой. От гидротранс-формато-ра это устройство отличается отсутствием реактора, а от обычных механических муфт – отсутствием жесткой связи между валом двигателя и ведомым валом. Основными элементами традиционной гидромуфты являются заключенные в корпус насосное 1 (соединено с ведущим валом) и турбинное колеса 2 с лопастями (-с выходным (ведо-мым)) Расположенные соосно рабочие органы гидравлической турбины и лопастного насоса, находясь в едином герметичном корпусе, предельно сближены друг с другом (но без соприкосновения). Во время вращения насосного колеса рабочая жидкость попадает прямо на лопатки турбинного колеса, сообщая ему вращающий момент.
В работе гидравлической муфты выделяют 3 состояния:
- состояние покоя;
- трогание с места;
- работа в номинальном режиме.
Изначально вся жидкость в корпусе муфты находится в полностью неподвижном состоянии. Второй этап – трогание с места. С повышением частоты вращения вала двигателя насосное колесо увеличивает скорость рабочей жидкости, что приводит к созданию циркулирующего потока. В это время круговой поток начинает омывать турбинное лопастное колесо, заставляя его вращаться. Для изменения крутящего момента муфта может быть оборудована специальными камерами (кольцевая камера или камера замедления). За счет небольшой разницы между частотой вращения турбинного и насосного колес в гидромуфте устанавливается постоянный циркулирующий поток.
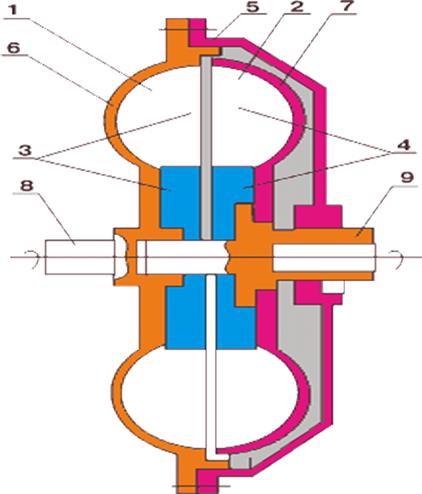
На рис.1 схематично в меридиональном сечении показана гидромуфта, имеющая ведущее лопастное насосное колесо центробежного типа 1(насос) и ведомое лопастное колесо, выполняющее функцию реактивной турбины 2(турбина). Оба колеса имеют, как правило, плоские радиальные лопатки 3 и 4. К насосу 1 присоединен вращающийся при работе корпус 5. Диски 6 и 7 насоса и турбины выполнены в виде чаш с криволинейными образующими. В совокупности с межлопастными каналами торообразная часть полости гидромуфты, заключенная между чашами насоса и турбины, является рабочей полостью. Между торцами колес имеется небольшой осевой зазор, благодаря чему возможно вращение одного колеса относительно другого. Замкнутая полость гидромуфты заполняется рабочей жидкостью (РЖ), в качестве которой используются чаще всего минеральные маловязкие масла. В пожароопасных условиях применяются вода и водные эмульсии, а также трудновоспламеняемые синтетические масла. В приводном блоке насос соединяется валом 8 с двигателем, а турбина валом 9 с механической передачей. При включении двигателя насос своей лопастной системой увлекает во вращение РЖ и, отбрасывая к периферии рабочей полости, направляет ее на лопатки турбины.
Крутящий момент гидромуфты передается всегда при некотором отставании скорости турбины от скорости насоса. Это значит, что гидромуфта работает со скольжением. Скольжение отображает долю потерь мощности, идущих на нагрев РЖ и деталей гидромуфты.
Гурбомуфта типа Т представляет собой базовую конструкцию муфты с постоянным наполнением. Эта муфта состоит из корпуса, насосного и турбинного колес. За счет установки дополнительных элементов в базовую конструкцию становится возможным создание других разновидностей гидромуфт. С целью компенсации небольших неточностей, допускаемых при установке, для соединения турбомуфты с валом приводного двигателя используется эластичная соединительная муфта. Устройства данного типа, как правило, применяются при необходимости гашения колебаний, защиты машины и двигателя от возможных перегрузок, а также в обычных приводах, для которых характерен низкий диапазон мощности.
Гидравлическая муфта типа DT включает в себя пару рабочих контуров, которые действуют параллельно. Такие гидродинамические передачи находят применение в конструкциях роторных экскаваторов, разминально-месильных машин и черпаковых подъемников. На наружном колесе турбомуфты типа TV располагается камера замедления, которая при остановке заполняется (не целиком) жидкостью. Благодаря временному уменьшению объема жидкости в рабочем контуре во время процесса пуска осуществляется передача крутящего момента меньшей величины. Таким образом, запуск машины происходит без нагрузки. Через некоторое время, с разгоном двигателя, жидкость, находящаяся в камере замедления, перемещается в рабочее пространство, так что способность передачи максимальной мощности никуда не исчезает.
Гидравлические муфты имеют целый ряд преимуществ:
- плавный, разгруженный запуск;
- снижение энергопотребления во время пуска, достигаемое за счет запуска двигателя с минимальной нагрузкой;
- защита двигателя, а также вращающихся деталей оборудования от перегрузок в случае блокировок;
- возможность применения недорогих электродвигателей с короткозамкнутым ротором (без использования какой-то специальной пусковой аппаратуры);
- ограничение величины крутящего момента во время пуска;
- долговечность и надежная защита от перегрузок, достигаемая благодаря отлаженной работе жидкостной кинематической цепи;
- простота и относительная дешевизна технического обслуживания;
- эффективное демпфирование (обеспечивается жидкостной связью насосного колеса и турбины) крутильных колебаний и вибраций, неизменно сопутствующих функционированию машины;
- возможность реализации многочисленных запусков;
- выравнивание в автоматическом режиме нагрузок, возникающих при эксплуатации двух- или многомоторных приводов.
Благодаря плавному разгону машины с большой величиной момента инерции вращающихся элементов становится целесообразным применение гидромуфт в центрифугах, дисковых и молотковых дробилках, сепараторах, шаровых мельницах, транспортерах, отличающихся большой длиной, вентиляторах и т.п. Итогом установки гидравлической муфты в названных машинах становится замена имеющих сложную конструкцию электродвигателей с фазным ротором на более простые короткозамкнутые агрегаты. Равномерность распределения нагрузки (приводящая к повышению компактности привода, уменьшению пускового тока, достижению плавности пуска и повышению срока эксплуатации двигателей) при использовании привода, включающего в себя несколько двигателей, применяется в ленточных и цепных скребковых конвейерах, барабанных сушилках, 2-хроторных дробилках.
Такое достоинство гидродинамических передач, как гашение колебаний, поспособствовало их применению в конструкциях роторных экскаваторов, конусных и щековых дробилок, поршневых насосов, грохотов и др. За счет демпфирования колебаний достигается существенное сокращение поломок различных узлов. Это обусловлено снижением усталостных напряжений в деталях. Защита от перегрузок при запуске и в процессе торможения не только обеспечивает устойчивую работу оборудования, но и уменьшает количество простоев на ремонт (соответственно, и расход запасных частей), увеличивает срок службы как отдельных узлов привода, так и машины в целом. Данное положительное свойство гидромуфт нашло применение в машинах, обладающих большими маховыми массами, и оборудовании, запуск которого производится под нагрузкой. К первой категории относятся мельницы, вентиляторы и центрифуги, а ко второй – скреперные лебедки, горные машины, скребковые конвейеры и т.п. Таким образом, включение гидромуфты в состав силового привода обеспечивает значительную оптимизацию его характеристик (как статических, так и динамических), а это оказывает неоценимую помощь в увеличении эксплуатационной надежности оборудования.
Гидромуфта была создана в Германии в 1909-1910 годах профессором Фиттингером и впервые была применена в качестве эластичной связи двух валов на судне.
В настоящее время гидромуфты используются для передачи мощности от 0,5 до 35000 кВт в одном агрегате и более.
На оптимальных режимах работы коэффициент полезного действия гидравлических передач достигает (85 - 98)%.
Гидромуфты подразделяются на регулируемые и замкнутые.
Регулируемые гидромуфты предназначены, как правило, для относительно неглубокого (до 30-40%) регулирования частоты вращения ведомого вала привода. К таким машинам относятся мощные (до15тыс.квт) центробежные насосы, турбогенераторы, вентиляторы. Для многих лопастных машин регулирование гидромуфтой имеет ряд преимуществ по сравнению с другими способами регулирования скорости. Наибольшее распространение в мировой практике получили более простые по конструкции и обслуживанию нерегулируемые замкнутые гидромуфты.
Основные типы и характеристики замкнутых гидромуфт.
Замкнутые гидромуфты постоянного наполнения условно могут быть подразделены на предохранительные и пускопредохранительные. Предохранительные гидромуфты ограничивают крутящий момент значением, меньшим на 15-20% максимального (опрокидного) момента приводного электродвигателя (двигатель). Значение пускового (стопового) момента в отдельных моделях таких гидромуфт может иметь значение 1,3-1,4 от величины номинального момента. В этом случае предохранительная гидромуфта выполняет функцию муфты предельного момента. Пускопредохранительная гидромуфта предназначена для поддержания вращающего момента привода в течение всего периода разгона машины в пределах 1,3-1,5 от номинального момента. Характерным примером применения предохранительной гидромуфты как муфты предельного момента является роторный экскаватор, а пускопредохранительной гидромуфты - ленточный конвейер большой длины.
Выравнивание нагрузок на двигатели
В некоторых машинах по условиям компоновки и в соответствии с требованиями эксплуатации необходимо использовать два или более двигателя для приведения в действие через суммирующий редуктор или отдельные приводные блоки единого исполнительного органа. К таким машинам относятся ленточные и цепные скребковые конвейеры, роторные экскаваторы, дробилки отдельных типов, горнопроходческие щиты, комбайны и др. Обладая свойствами демпфирования и гашения крутильных колебаний, пульсирующих и пиковых нагрузок, гидромуфта позволяет увеличить срок службы машин. Гидромуфты ведущих фирм Запада широко используются во всех отраслях промышленности большинства стран мира. В то же время в России так же, как и в странах СНГ, наблюдается значительное отставание в сфере серийного производства и применения гидромуфт, что снижает технический уровень и эксплутационную надежность многих отечественных машин.
ГИДРОДИНАМИЧЕСКАЯ ПЕРЕДАЧА
Гидродинамические передачи – это гидравлические устройства вращательного движения, в которых крутящий момент передаётся от ведущего к ведомому валу вследствие изменения момента количества масла, проходящего через лопастные колёса.
Гидродинамические передачи, используемые в транспортных машинах, разделяются на гидромуфты, гидротрансформаторы и комплексные передачи. Комплексные передачи обладают на одних режимах работы свойствами гидротрансформатора, а на других – гидромуфты.
Основное различие между гидромуфтой и гидротрансформатором состоит в том, что первая позволяет плавно изменять угловую скорость ведомого вала и передавать крутящий момент без его трансформации, а второй при изменении частоты вращения ведомого вала автоматически изменяет крутящий момент в зависимости от приложен-
ного к ведомому валу сопротивления.
Гидротрансформаторы автоматически и непрерывно изменяют в значительных пределах крутящий момент на ведомом валу.
В гидротрансформаторах между насосным и турбинным колёсами, в отличие от гидро-муфты, устанавливают дополнительно реакторное колёсо, которое жёстко соединяется с картером. Реакторное колёсо устанавливается между выходом из турбинного колёса и входом в насосное колёсо и предназначено для изменения направления движения потока масла таким образом, чтобы оно совпало с направлением вращения насосного колёса. При этом неизрасходованная энергия масла не тормозит насосное колёсо, как это происходит в гидромуфте, а, наоборот, помогает его вращению, что позволяет сообщать насосному колёсу дополнительную энергию.
Комплексная гидропередача объединяет в одном агрегате гидромуфту и гидротрансфор-матор. Она состоит из насосного, турбинного и реакторного колёс. Однако реакторное колесо, в отличие от гидротрансформатора, соединяется с картером не жёстко, а через обгонную муфту. Такое решение обеспечивает автоматический переход гидродина-мической передачи с режима гидротрансформатора на режим гидромуфты и обратно.
Отсутствие жёсткой кинематической связи между валом двигателя и ведущими колёсами машины обеспечивает пуск двигателя и остановку машины без выключения передачи в коробке передач. Наличие такой связи устраняет вероятность того, что заглохнет двигатель как по неопытности водителя, так и вследствие внезапного возрастания
внешнего сопротивления, при котором может произойти полная остановка автомобиля.
Плавность передачи тягового усилия в случае использования гидропередачи повышает проходимость автомобиля при движении по грунтам с плохими сцепными свойствами.
Поскольку гидродинамические передачи не пропускают крутильные колебания от двигателя в трансмиссию, то повышается надёжность и долговечность агрегатов моторно-трансмиссионной установки автомобиля. Лопастные колёса гидропередачи (насосное, турбинное, реакторное) практически не изнашиваются.
Гидромеханические трансмиссии по сравнению с обычной механической трансмис-сией имеют несколько меньший КПД. Значительные внутренние потери энергии в гидродинамических передачах вызывают необходимость установки радиаторов для охлаждения масла.
Несмотря на то, что гидротрансформатор и комплексная гидропередача изменяют передаваемый от двигателя крутящий момент в соответствии с изменением внешней нагрузки, трансмиссия автомобиля должна включать в себя коробку передач. К сожа-лению, применяемые гидродинамические передачи могут изменять величину пере-даваемого крутящего момента лишь в 2–3 раза, что недостаточно для движения
автомобилей в различных дорожных условиях.
Источники информации
1. Гидропневмоавтоматика и гидропривод мобильных машин. Объемные гидро- и пневмомашины и передачи. Под ред. Гуськова В.В. - Мн.: Выш. шк., 1987. - С.212-221.
2. Галеева Р.А., Сунарчин Р.А. Объемные гидромашины. - Уфа.: изд. Уфимского ордена Ленина авиационного института им. Серго Орджоникидзе, 1984. - С.62-71.
Гидравлические системы автотранспортных средств.
Гидравлические системы шасси и технологического оборудования автомобилей, их принципиальные и структурные схемы
1. Гидравлические усилители рулевого привода автомобилей.
Все многообразие современных конструкций гидроусилителей рулевого управления автомобилей можно представить схемами, изображенными на рис.3.
Краткий анализ представленных схем позволяет сделать следующие обобщения. Конструкции, реализованные по схеме на рис.3.а имеют достоинства: минимальное количество трубок и соединительной арматуры в гидроприводе; минимальное время срабатывания гидроусилителя руля – такую схему в литературе иногда называют «гидроруль». Основным недостатком данного варианта является повышенная механическая нагруженность элементов крепления «гидроруля» на раме автомобиля.
Технические решения, соответствующие схеме на рис.3.б в положительном отношении характеризуются высокой чувствительностью гидропривода управляемых колес, а в отрицательном – относительно большим количеством шарниров рулевого привода, что ускоряет динамику нарастания зазоров в нем. Конструкции гидроусилителей выполненные по схеме на рис.3.в положительно отличаются хорошей чувствительностью привода управляемых колес, но имеют относительно большую протяженность соединительных трубопроводов. Это в свою очередь снижает быстродействие гидравлической системы и ее надежность.
Гидроусилители рулевого управления по схеме на рис.3.г весьма технологичны с точки зрения компоновки конструкции – все агрегаты автономны, однако, значительная длина трубопроводов и большое количество шарниров механической части привода являются причиной пульсаций в процессе действия гидропривода в целом и повышенному нагреву рабочей жидкости.
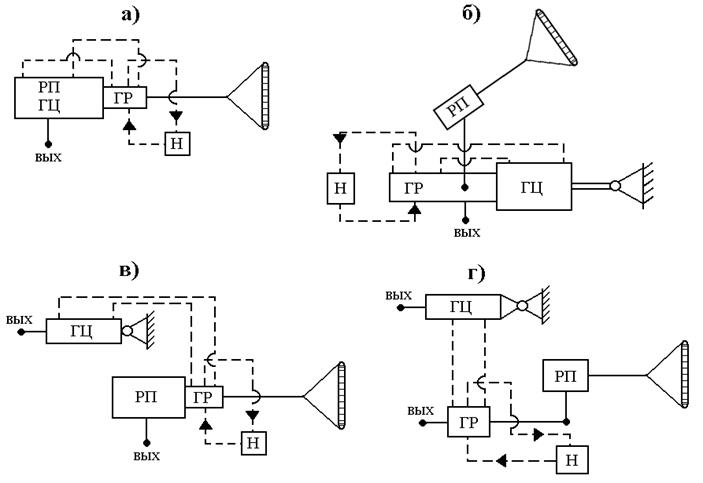
Рис.3. Принципиальные схемы гидравлических систем усилителей рулевого управления автомобилей: а) встроенный усилитель (автомобили ЗИЛ, КАМАЗ, МАN 40, МАN 365, FAUN FZ 40, 45, ГАЗ - 3110 и др.); б) полувстроенный (МАЗ – 5335, 5434, 509А и др.); в) полуразнесенный (УРАЛ – 375, 43204, КАЗ – 4540, КРАЗ – 6437, 260 и др.); г) разнесенный усилитель (ГАЗ – 66)
На рис.3 использованы следующие обозначения компонентов принципиальных схем: Н – насос; РП – рулевая передача; ГР – гидрораспределитель; ГЦ – исполнительный гидроцилиндр; вых. – механическая силовая связь гидроусилителя с элементами рулевого привода (продольная тяга, элементы рулевой трапеции).
Основными показателями для оценки качества функционирования гидроусилителя рулевого управления являются:
- коэффициент эффективности
Э = РРК/( РРК – РЦ), (1)
где РРК – усилие на ободе рулевого колеса, РЦ – усилие от гидроусилителя, приведенное к рулевому колесу (в реальных конструкциях ЭMAX = 10…15);
- чувствительность, под которой понимаются угол поворота рулевого колеса α и усилие на его ободе РЧУВ, при которых происходит включение гидроусилителя (в существующих конструкциях α = 10…15о, РЧУВ = 20…50 Н).
Гидроусилитель рулевого управления обеспечивает кинематическое и силовое следящее действие, имеет систему клапанов, которые автоматически оптимизируют быстродействие гидросистемы рулевого привода и ограничивают максимальное давление жидкости (обычно до 6,5…7 МПа), с целью защиты механических компонентов привода от деформаций и разрушения).
Несколько реже на автомобилях применяются гидроприводы рулевого управления в соответствии со схемой на рис. 4.
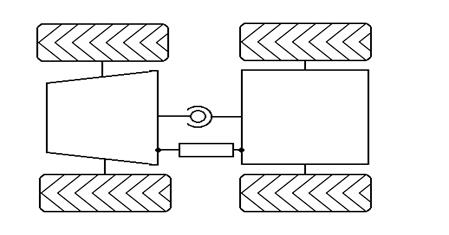
Рис.4. Принципиальная схема гидромеханизма поворота шарнирно-сочлененного автомобиля (МАЗ – 529 (Белоруссия), М520, D 550 (США))
Данные конструкции характерны для транспортных средств имеющих шарнирно-сочлененную раму ходовой системы. Основным достоинством в этом случае является то, что в кузове отсутствуют колесные ниши для поворота управляемых колес, поэтому их шины можно выполнить широкопрофильными большого диаметра. Поэтому рассматриваемая схема актуальна для автомобилей, работающих в тяжелых дорожных условиях или по бездорожью.
!!!!!! 2. Гидравлические системы привода тормозов автомобилей.
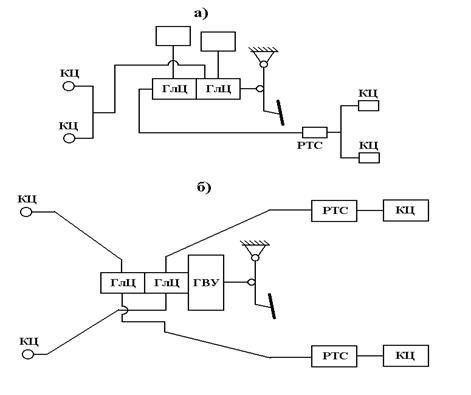
Рис.5. Структурные схемы гидравлического привода тормозов автомобилей:
а – двухконтурная типа «Тандем» (модельный ряд классики ВАЗ и др.); б – двухконтурная диагонального типа (ВАЗ 2108, 2112, ЗАЗ – 1102, AUDI – 100 и др.)
На рис.5 использованы следующие обозначения компонентов структурных схем: ГлЦ – главный тормозной цилиндр; КЦ – колесный цилиндр; РТС – регулятор тормозных сил; ГВУ – гидровакуумный усилитель.
На современных легковых автомобилях и грузовых с полной массой до 7,5 тонн нашли применение многоконтурные гидравлические тормозные приводы. Принципиальные схемы наиболее распространенных из них представлены на рис.5. Общими достоинствами данных систем являются: быстродействие; малые габариты агрегатов, а значит и минимальное компоновочное пространство; максимальная приспособленность для введения компонентов с компьютерным управлением (например, антиблокировочные системы (АБС)). Следует отметить, что диагональная схема (рис.5.б) по сравнению со схемой «тандем» (рис.5.а) при отказе одного из контуров обеспечивает эффективность торможения максимально возможные 50%. Но при этом, в качестве конструктивной особенности подвески передних управляемых колес требуется отрицательное плечо обкатки.
Гидравлические системы исполнительных устройств технологического оборудования автомобилей (на примере автомобиля-самосвала).
Исполнительные устройства автомобилей с гидравлическим объемным приводом очень разнообразны. Это, например, гидравлические манипуляторы и краны, специальные коммунальные и строительные машины и т.д. В качестве примера рассмотрим гидравлический механизм подъема кузова автомобиля-самосвала. В специальной литературе их часто называют «гидродомкратами». В зависимости от выбранного признака выделяют следующие их типы.
1. По компоновке конструкции: одноступенчатые с усилием от 15 до 150 тонн; многоступенчатые (обычно до 4Х ступеней) от 5 до 240 тонн.
2. По восприятию внешней нагрузки: одностороннего действия; двустороннего действия.
На рис.6 изображена структурная схема гидравлической системы подъемного устройства кузова автомобиля-самосвала на основе трехступенчатого гидроцилиндра одностороннего действия. Аналогичную схему имеют многие современные автомобили-самосвалы, например отечественный ЗИЛ-ММЗ-555. Гидросистема управляется из кабины посредством рычага. Насос шестеренного типа имеет привод через коробку отбора мощности от коробки передач базового шасси. Максимальное давление в данной гидросистеме может достигать 8 МПа.
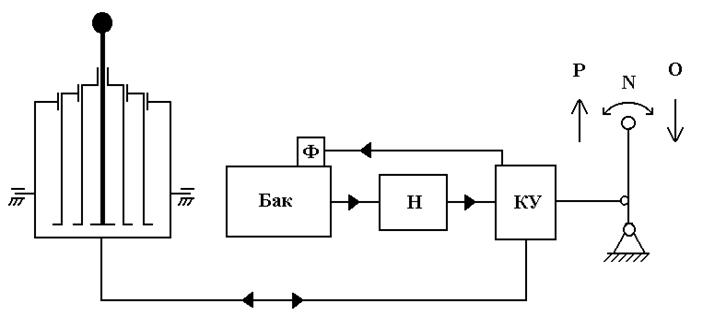
Рис.6. Структурная схема гидросистемы подъемного механизма кузова автомобиля-самосвала: Н – насос; КУ – кран управления; Ф – фильтр гидросистемы; P,N,O – положение рукоятки управления на «подъем», «нейтральное», «опускание», соответственно
Краткие сведения о рабочих жидкостях рассмотренных гидросистем.
Подробное изучение автомобильных масел предусматривают специальные дисциплины учебного плана. Следует отметить большое разнообразие данных эксплуатационных материалов на практике. Здесь следует указать на то, что в технической эксплуатации необходимо придерживаться соответствующих инструкций заводов и фирм производителей. Для примера представим некоторые, наиболее применяемые в России рабочие жидкости для автомобильных гидравлических систем. Это отечественные масла МГ- 15 - В, МГ - 46 - В, И5А, И12А, МГ3, Р. Зарубежные аналоги AF42 (Shell), Univis S13 (Exxon), Tellus 46 (Shell), Hyspin AWS 46 (Exxon), Vitrea 9, Vitrea 22 (Shell). Отечественные тормозные жидкости БСК, ГТЖ – 22М, «Нева», «Томь», «Роса».
4. Функциональные подгруппы гидравлического автосервисного оборудования
4.1. Обзор гидросистем оборудования для мойки автомобилей.
В основу данного обзора целесообразно положить классификацию гидравлических способов мойки автомобилей и их агрегатов.
Гидродинамический (струйный) способ мойки. В качестве принципа использует скоростной напор моющей жидкости, при этом скорость струи достигает 50…100 м/с и моющий раствор, как правило, содержит в себе эффективные химические моющие средства. Основной недостаток – большой расход воды.
Способ влажного протирания, при котором смоченные поверхности объекта мойки протираются тем или иным рабочим органом установки. В данном случае имеет место малый расход моющей жидкости, но процесс требует достаточно сложной конструкции моечных щеточных устройств.
По величине рабочего давления процесса шланговой и струйной мойки гидросистемы оборудования бывают: низкого давления – 0,2…0,4 МПа; среднего давления – 0,4…1 МПа; высокого давления – 1…14 МПа.
В зависимости от способа движения коллекторов с сопловыми насадками моечные гидросистемы могут быть: c круговым движением насадок; с перекрещивающимися траекториями коллекторов; c эллипсоидными движениями сопел.
Основными перспективными тенденциями в развитии гидравлических систем моечного оборудования автосервисов считаются:
- увеличение напора моющей жидкости в среднем до 3…4 МПа;
- подогрев воды;
- регенерация воды;
- специализация гидросистем моечного оборудования в зависимости от обрабатываемых объектов;
- применение специальных насадок выходных сопел (переменные диаметр и угол атаки струи и т.п.).
4.2. Гидравлические системы подъемно-осмотрового и подъемно-транспортного оборудования.
Здесь возможен следующий классификационный подход.
Прежде всего, данные системы подразделяются по количеству исполнительных устройств (гидроцилиндров, плунжеров): одно, двух и многоплунжерные.
По способу механического привода насосной станции гидросистемы подъемников могут быть с ручным (ножным) и электрическим приводом.
Усилие, создаваемое исполнительными цилиндрами гидроподъемников может варьироваться в пределах от 2 до 48 тонн, а удельное быстродействие гидропривода при выдвижении штоков от 1 до 3,7 т/мин.
Рабочий ход исполнительных цилиндров зависит от назначения подъемника и может иметь диапазоны: для напольного оборудования 1,1…2,3 м; для канавных подъемников 350…800 мм.
Особо следует выделить опрокидыватели и домкраты для автомобилей.
Так по усилию создаваемому гидромеханизмами опрокидывателей они находятся в диапазоне 1…3 тонны при угле наклона к горизонту до 60о.
Гидросистемы автомобильных телескопических домкратов способны реализовывать усилия 1,6…12,5 тонн, а ход штока в пределах 120…260 мм.
В качестве современного направления развития исполнительных гидравлических устройств автомобильных подъемников следует выделить создание ступенчатых многостоечных подъемников для производства работ на разных уровнях.
4.3. Обзор гидравлических систем оборудования для смазки элементов конструкции автомобилей.
Маслораздаточное оборудование гаражей специфику своих гидросистем отражает в следующих классификационных особенностях.
По способу привода рабочего насоса данные гидросистемы могут быть: c ручным (ножным) приводом; с электроприводом; с пневматическим приводом.
В зависимости от подготовки рабочей жидкости к заправке системы могут быть с подогревом и без него.
По способу измерения расхода масел в процессе заправки в гидросистеме могут использоваться объемные или скоростные методы замеров.
Наиболее характерными параметрами гидросистем маслораздаточных колонок гаражей являются: производительность 10…12 л/мин; рабочее давление 0,8…1,5 МПа.
Гидравлическое оборудование гаражных нагнетателей пластических смазок классифицируется по следующим признакам. По давлению нагнетания: 1АЯ ступень давления – 25 МПа; 2АЯ ступень давления – 40 МПа. В зависимости от числа исполнительных устройств – от 1ГО до 4Х. По подаче насоса высокого давления (при противодавлении в системе 10 МПа) – 150; 200; 300 г/мин.
4.4. Особенности гидрооборудования для разборочно-сборочных и ремонтных работ.
Прежде всего, здесь следует выделить гидравлические устройства для замены агрегатов автомобилей на постах с подъемниками напольного или канавного типа. В их гидросистемах применяются, как правило, плунжерные насосы с ножным приводом и двухступенчатые телескопические исполнительные гидроцилиндры с усилием на штоке до 1,5 тонн. Примерно аналогичное функциональное назначение имеют мини-краны передвижного типа для демонтажно-монтажных работ. Они обеспечивают своими гидроцилиндрами грузоподъемность стрелы 250…1000 кг. Эффективно применение при ремонте автомобилей передвижных трансмиссионных телескопических домкратов (обычно на трех опорах качения). Последние имеют гидросистему с ножным приводом и вертикальный исполнительный гидроцилиндр с усилием 800…1500 кг.
Особое место занимают в рассматриваемой подгруппе гидросистемы оборудования для кузовного ремонта. Они применяются на установках для создания гидроцилиндрами нескольких разнонаправленных усилий правки кузова. В данном случае усилия исполнительного органа могут достигать 4…20 тонн и иметь направление противоположное силе, вызвавшей деформацию. В гидросистему такого оборудования может входить до 4Х насосов (как правили с ножным приводом), несколько силовых гидроцилиндров и до 80ТИ специальных изделий-приспособлений для правки элементов кузова автомобиля.
Неотъемлемой частью данной подгруппы являются гаражные гидравлические прессы различного назначения. Они могут иметь усилие на исполнительном устройстве до 40 тонн, и приводится в действие от электродвигателя или вручную.
Автомобильные пневмоприводы. Перспективы развития.
Общие сведения.
Автомобильный пневматический тормозной привод используется на автомобилях средней и большой грузоподъемности и на автобусах.
2. Функции пневматического тормозного привода.
Здесь следует отметить следующие процессы и действия:
подготовка сжатого воздуха, состоящая в его отборе, сжатии, очистки от загрязнений, образование запасов сжатого воздуха в ресиверах и регулирования в них давления;
распределение сжатого воздуха по контурам привода и их защита;
передача энергии от ее источника к тормозным механизмам;
управление энергией в процессе передачи, то есть обеспечение с заданной точностью связи между усилием на педали и усилием на штоке тормозной камеры – данная связь является аналоговой (следящее действие);
контроль работоспособности тормозного привода и сигнализация о его состоянии.
3. Перечень групп требований к автомобильному тормозному пневмоприводу.
Требования к запасу сжатого воздуха. Например, для одиночных автомобилей и тягачей давление в ресиверах должно быть 0,65 – 0,8 МПа. Для прицепных автотранспортных средств давление в ресивере должно быть не ниже 0,8 МПа – если прицеп связан с тягачом по однопроводной схеме и не ниже 0,63 МПа, если схема двухпроводная. При этом в промежуточной точке, то есть на уровне питающей соединительной головки, оно должно быть не ниже 0,5 и 0,63 МПа, соответственно.
Требования к распределению сжатого воздуха по контурам. Например, при отказе какой либо части пневмопривода остальные должны быть способны осуществлять торможение, запасная тормозная система, дублирующая рабочую, должна обеспечить эффективность не менее 30% от предписанной контурам.
Требования к передаче энергии и управлению ею при передаче. В этом плане, например, должно обеспечиваться следящее действие пневмопривода тормозов, нормативное соотношение между удельными тормозными силами передней и задней осей автомобиля, а также между относительными замедлениями тягача и прицепа и давлением в управляющей магистрали, что служит критерием совместимости тягача и прицепа в автопоезде.
Требования к пневматическому приводу запасной тормозной системы. Так, давление в энергоаккумуляторах, при котором начинается торможение тягача не должно превышать 80% нижнего предела регулирования, что предупреждает самопроизвольное включение тормозов при колебаниях давления в тормозном приводе.
4. В общую структуру пневматического привода тормозов автомобилей входят элементы, отображенные на рис. 40.
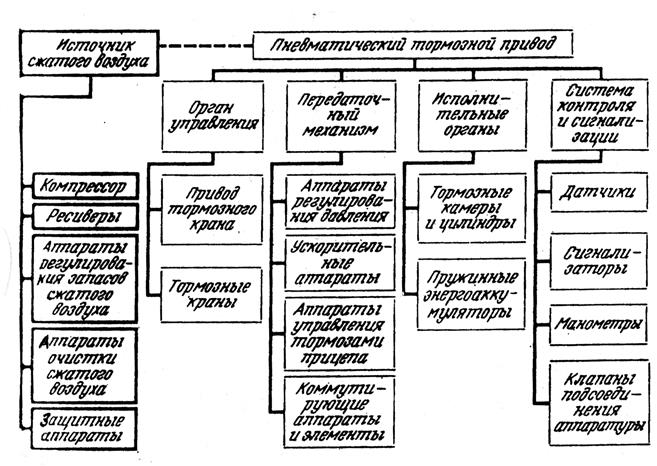
Рис. 40. Структурная схема пневматического тормозного привода
Примеры пневматического тормозного привода автопоездов.
Существует достаточно много конкретных схем конструктивной реализации пневматического привода рабочих тормозов грузовых автопоездов. Однако их можно свести практически к двум основным принципиальным схемам – применяющуюся на автопоездах более раннего производства (рис.41) и современную (рис.42).
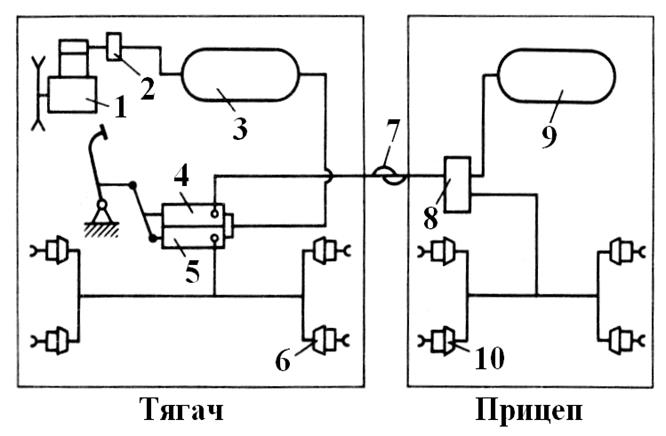
Рис. 41. Принципиальная схема однопроводного тормозного пневмопривода автопоезда с одноконтурным тормозным пневмоприводом тягача: 1 – компрессор; 2 – регулятор давления; 3 – ресивер тягача; 4 – секция тормозного крана управления тормозами прицепа (обратнодействующая); 5 – секция тормозов тягача; 6 – тормозные камеры тягача; 7 – соединительная головка типа «А»; 8 – воздухораспределитель прицепа; 9 – ресивер прицепа; 10 – тормозные камеры прицепа
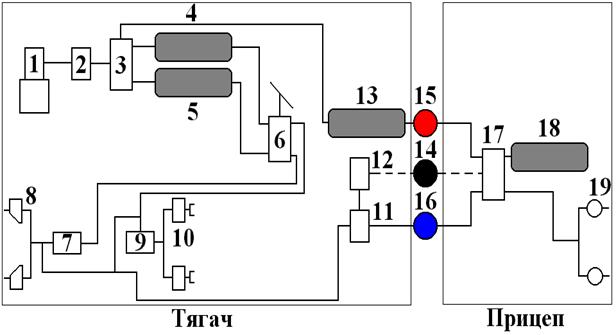
Рис. 42. Схема двухпроводного тормозного пневмопривода автопоезда с двухконтурным тормозным пневмоприводом тягача: 1 и 2 аналогично рис.39; 3 – защитный клапан; 4 – ресивер контура задней оси тягача; 5 – ресивер контура передней оси; 6 – тормозной кран тягача; 7 – клапан ограничения давления; 8 – тормозные камеры передней оси тягача; 9 – регулятор тормозных сил; 10 – задней оси; 11 – кран управления тормозами прицепа с двухпроводным приводом; 12 – кран управления тормозами прицепа с однопроводным приводом; 13 – ресивер питания привода прицепа; 14 – головка типа «А» однопроводного привода прицепа; 15 – питающая головка типа «Пальм» двухпроводного привода прицепа; 16 – головка типа «Палм» управляющей магистрали прицепа; 17 – воздухораспределитель прицепа; 18 – ресивер прицепа; 19 – тормозные камеры прицепа
7. Современные тенденции развития пневматического тормозного привода автомобилей:
введение компьютерного управления такими компонентами как регуляторы тормозных сил и антиблокировочные системы;
использование качественных материалов в конструкции отдельных элементов – цинковые сплавы корпусов и деталей металлоконструкции, фторопласт в узлах трения, различные полимерные композиции для диафрагм и клапанов;
все большее подключение различных потребителей автомобильных систем к запасам сжатого воздуха из ресиверов тормозного пневмопривода.
Гидравлические системы
Гидроприводом называется совокупность устройств, предназначенных для приведения в движение механизмов и машин посредством рабочей жидкости, находящейся под давлением, с одновременным выполнением функций регулирования и реверсирования скорости движения выходного звена гидродвигателя.
Гидропривод представляет собой своего рода «гидравлическую вставку» между приводным двигателем и нагрузкой (машиной или механизмом) и выполняет те же функции, что и механическая передача редуктор, ремённая передача, кривошипно-шатунный механизм и т. д.).
Функции гидропривода
Основная функция гидропривода, как и механической передачи, — преобразование механической характеристики приводного двигателя в соответствии с требованиями нагрузки (преобразование вида движения выходного звена двигателя, его параметров, а также регулирование, защита от перегрузок и др.).
Другая функция гидропривода — это передача мощности от приводного двигателя к рабочим органам машины (например, в одноковшовом экскаваторе — передача мощности от двигателя внутреннего сгорания к ковшу или к гидродви-гателям привода стрелы, к гидродвигателям поворота башни и т.д.).
В общих чертах, передача мощности в гидроприводе происходит следующим образом:
приводной двигатель передаёт вращающий момент на вал насоса, который сообщает энергию рабочей жидкости.
Рабочая жидкость по гидролиниям через регулирующую аппаратуру поступает в гидродвигатель, где гидравлическая энергия преобразуется в механическую.
После этого рабочая жидкость по гидролиниям возвращается либо в бак, либо непосредственно к насосу.
Виды гидроприводов
Гидроприводы могут быть двух типов: гидродинамические и объёмные.
В гидродинамических приводах используется в основном кинетическая энергия потока жидкости (и соответственно скорости движения жидкостей в гидродинамических приводах велики в сравнении со скоростями движения в объёмном гидроприводе).
В объёмных гидроприводах используется потенциальная энергия давления рабочей жидкости (в объёмных гидроприводах скорости движения жидкостей не велики — порядка 0,5-6 м/с).
Объёмный гидропривод — это гидропривод, в котором используются объёмные гидромашины (насосы и гидродвигатели). Объёмной называется гидромашина, рабочий процесс которой основан на попеременном заполнении рабочей камеры жидкостью и вытеснении её из рабочей камеры. К объёмным машинам относят, например, поршневые насосы, аксиально-поршневые, радиально-поршневые, шестерённые гидромашины и др.
Гидравлический двигатель (гидродвигатель) — гидравлическая машина, предназначенная для преобразования гидравлической энергии в механическую. К гидродвигателям относят гидромоторы, гидроцилиндры, гидротурбины и поворотные гидродвигатели.)
Одна из особенностей, отличающая объёмный гидропривод от гидродинами-ческого, — большие давления в гидросистемах. Так, номинальные давления в гидросистемах экскаваторов могут достигать 32 МПа, а в некоторых случаях рабочее давление может быть более 300 МПа, в то время как гидродинамические машины работают обычно при давлениях, не превышающих 1,5—2 МПа.
Объёмный гидропривод намного более компактен и меньше по массе, чем гидродинамический, и поэтому он получил наибольшее распространение.
В зависимости от конструкции и типа входящих в состав гидропередачи элементов объёмные гидроприводы можно классифицировать по следующим признакам.
1. По характеру движения выходного звена гидродвигателя:
1.1. Гидропривод вращательного движения, когда в качестве гидродвигателя применяется гидромотор, у которого ведомое звено (вал или корпус) совершает неограниченное вращательное движение;
1.2. Гидропривод поступательного движения у которого в качестве гидродвига-теля применяется гидроцилиндр — двигатель с возвратно-поступательным движением ведомого звена (штока поршня, плунжера или корпуса);
1.3. Гидропривод поворотного движения, когда в качестве гидродвигателя применён поворотный гидродвигатель, у которого ведомое звено (вал или корпус) совершает возвратно-поворотное движение на угол, меньший 360°.
2. По возможности регулирования:
Регулируемый и нерегулируемым.
Если скорость выходного звена (гидроцилиндра, гидромотора) регулируется изменением частоты вращения двигателя, приводящего в работу насос, то гидро-привод считается нерегулируемым.
В Регулируемом гидроприводе в процессе его эксплуатации скорость выходного звена гидродвигателя можно изменять по требуемому закону. В свою очередь регулирование может быть:
-дроссельным
-объёмным
-объёмно-дроссельным.
- ручным или автоматическим.
В зависимости от задач регулирования гидропривод может быть:
-стабилизированным
-программным
-следящим (гидроусилители).
Саморегулируемый гидропривод автоматически изменяет подачу жидкости по фактической потребности гидросистемы в режиме реального времени (без фазового сдвига).
По схеме циркуляции рабочей жидкости
3.1. Гидропривод с замкнутой схемой циркуляции в котором рабочая жидкость от гидродвигателя возвращается во всасывающую гидролинию насоса.
Гидропривод с замкнутой циркуляцией рабочей жидкости компактен, имеет небольшую массу и допускает большую частоту вращения ротора насоса без опасности возникновения кавитации, поскольку в такой системе во всасывающей линии давление всегда превышает атмосферное. К недостаткам следует отнести плохие условия для охлаждения рабочей жидкости, а также необходимость спускать из гидросистемы рабочую жидкость при замене или ремонте гидроаппаратуры;
Гидропривод с разомкнутой системой циркуляции в котором рабочая жидкость постоянно сообщается с гидробаком или атмосферой.
Достоинства такой схемы — хорошие условия для охлаждения и очистки рабочей жидкости. Однако такие гидроприводы громоздки и имеют большую массу, а частота вращения ротора насоса ограничивается допускаемыми (из условий бескавитационной работы насоса) скоростями движения рабочей жидкости во всасывающем трубопроводе.
Дата: 2019-11-01, просмотров: 531.