Диапазоны регулирования станка
Определяем диапазоны регулирования привода:
Определяем диапазоны регулирования двигателя:
Определяем диапазоны регулирования двигателя при постоянной мощности:
Определяем диапазоны регулирования двигателя при постоянном моменте:
Определяем диапазоны регулирования шпинделя при постоянной мощности:
Для определения бесступенчатого регулирования частоты вращения шпинделя при постоянной мощности знаменатель ряда передаточных отношений передач коробки скоростей φ1 принимаем равным RдР.
Требуемое число ступеней коробки скоростей:
Принимаю Z=2
При постоянной мощности диапазон регулирования шпинделя:
 .
.
Минимальная частота вращения при постоянной мощности:
Разработка и построение структурных сеток и графиков чисел оборотов
По заданному числу z=2 определяем возможные типы схем сложенных структур , т.к. простые множительные структуры не используем.
Общий вид типовой структуры главного привода станка на рис. 4.1

Рисунок 4.1 -Типовая структура главного привода станка.
Структурная сетка коробки скоростей приведена на рис. 4.2

Рисунок 4.2 - Структурная сетка.
График чисел оборотов приведен на рис.4.3
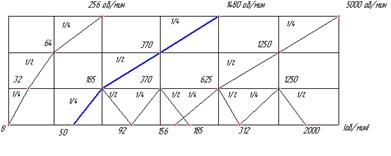
Рисунок 4.3-График чисел оборотов
Выбор чисел зубьев и определение действительных частот вращения
Подбор чисел зубьев
Для подбора чисел зубьев воспользуемся графиком чисел оборотов (рис.4.3) и значениями передаточных отношений I между звеньями коробки главного движения.
Передаточные отношения:
 ;
;
 ;
;
 ;
;
 ;
;
Подбираем числа зубьев [5,стр.121,табл.3]:
z1 = 16; z2 = 64; z3 = 30; z4 = 60; z5 = 40; z6 = 40; z7 = 16; z8 = 64; z9 = 30; z10 = 60;
Расчет погрешностей кинематических цепей станка


 ,
,








В результате проверки всех основных цепей можно сделать вывод, что числа зубьев колес подобраны правильно и погрешности цепей не превышают допустимую погрешность.
Разработка кинематической схемы привода
На основании графика частот вращения и найденных значений чисел зубьев составляем принципиальную кинематическую схему привода главного движения станка (рис.5.1).
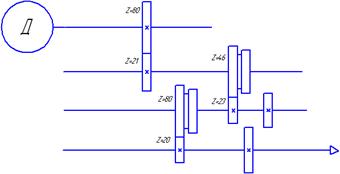
Рисунок 5.1 - Кинематическая схема привода главного движения станка
Силовой расчет привода станка
Расчет коэффициента полезного действия
Определяем эффективную мощность станка затрачиваемую на процесс резания:

Мощность холостого хода
Для станков с главным вращательным движением приблизительно можем найти по такой формуле:


где dср. – среднее арифметическое в мм. диаметров всех опорных (подшипниковых) шеек валов коробки скоростей станка. dср=30…50мм. dшп. - среднее арифметическое в мм. диаметров всех опорных шеек шпинделя. (70…120мм.). С =2 (для подшипников скольжения); n1, n2, n3 – частоты вращения в мин-1 валов коробки скоростей.
Расчетный КПД станка
Определяют в зависимости  :
:
 ;
;

Мощность главного двигателя
Мощность главного двигателя определяют по формуле:

Из выше перечисленных расчетов можновыбрать двигатель безступенчатым изменением скоростей. Выбираем двигатель серии 4П, ближайший по мощности двигатель 4ПФ112S с креплением на фланце, мощностью  кВт, частотой вращения
кВт, частотой вращения  .
.  ;
;  ;
;  ;
; 
Дата: 2019-07-31, просмотров: 479.