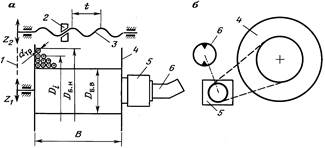
Емкость барабана определяется его габаритами и диаметром гибкой трубы, наматываемой на него (рис. 16, а). Габариты барабана – внутренний Dб.в и наружный Dб.н диаметры, длина рабочей части Lб.
При проектировании внутренний диаметр барабана устанавливают, исходя из опыта эксплуатации аналогичных установок, обычно Dб.в = 1600 мм для труб диаметром 25 мм, наружный диаметр принят из конструктивных соображений – возможности установки барабана на конкретное автомобильное шасси – Dб.н = 1900 ¸ 2400 мм, длина рабочей части барабана Lб = 1200 мм.
Число рядов труб, наматываемых на барабан, определяют по формуле
Z = (Dб.н – Dб.в)/2dтр,
откуда
Z = (1900 – 1600)/2×25 = 6.
Число витков трубы, намотанной на барабан в одном ряду,
i = [Lб/(dтр + as)] – 1,
где as – сумма допуска на овальность трубы и зазора между трубами (as = 1 мм),
отсюда
i = [1200/(25 + 1)] – 1 = 45.
Емкость барабана рассчитывают по формуле
L = piZ(Dб.в + dтрZ) = 3,14×45×6×(1600 + 25×6) = 1483 м.
Масса трубы, намотанной на барабан,
Mтр = Lqтр,
где qтр – масса 1 м трубы.
Для 1 м трубы при ее диаметре 25 мм и толщине стенки 2 мм qтр = 1,435 кг, а соответственно при 33 мм и 3 мм qтр = = 2,808 кг.
Для труб диаметрами 25 и 33 мм их массы соответственно будут
Mтр = 1483×1,435 = 2128 кг;
Mтр=1483×2,808 = 4164 кг.
| ||
| Рис. 16. Кинематическая схема барабана для наматывания колонны гибких труб и их укладчика при использовании планетарного редуктора (а) и цепной передачи (б): 1 – цепная передача привода механизма укладки КГТ (Z1, Z2 – число зубьев звездочек); 2 – каретка; 3 – ходовой винт; 4 – катушка; 5 – планетарный редуктор; 6 – гидравлический мотор.
| ||
Трубоукладчик
Механизм укладчика трубы на барабан обеспечивает ее плотную регулярную намотку без образования пережимов и петель. При работе в штатном режиме перемещение каретки укладчика должно быть синхронизировано с вращением барабана. Подобная система принята во всех агрегатах, производимых в США и Канаде (см. рис. 16).
На ряде установок работой укладчика трубы на барабан оператор управляет вручную. В таких условиях он должен концентрировать свое внимание на приборах пульта управления, поэтому подобную конструкцию следует считать не соответствующей современному уровню развития оборудования данного типа.
В то же время механизм укладчика должен обеспечивать возможность ручной корректировки укладки трубы, что обусловлено, например, неизбежным смещением наружных витков при транспортировании агрегата со скважины на скважину, отклонением наружного диаметра от номинального из-за смятия трубы, погрешности ее изготовления и т.д.
Кинематическая схема укладчика включает (см. рис. 16) каретку, установленную на ходовом винте с шагом t, цепную передачу (или передачи) с передаточным отношением i, обеспечивающую синхронизацию движения каретки и барабана. Ведомая звездочка цепной передачи соединена с ходовым винтом посредством кулачковой муфты. Ходовой винт также имеет привод от гидромотора, вал которого соединен с ходовым винтом через редуктор.
Условие согласования перемещения каретки и вращения барабана следующее: один оборот барабана должен соответствовать перемещению каретки на величину, равную диаметру гибкой трубы.
Частота вращения ходового винта
nх.в = nб(Z1/Z2),
где nб – частота вращения барабана; Z1, Z2 – число зубьев соответственно ведущей и ведомой звездочек (Z1/Z2 = i).
Перемещение каретки по ходовому винту
s = tnх.в = tnбZ1/Z2.
За один оборот барабана каретка должна переместиться на величину диаметра укладываемой трубы, т.е. s = dтр.
Тогда
dтр = t(Z1/Z2) = ti.
Таким образом, кинематические характеристики укладчика трубы не зависят от емкости барабана и числа рядов труб на нем, а определяются только шагом винта укладчика и передаточным отношением синхронизирующей цепной передачи.
Привод
Привод включает в себя двигатель, обеспечивающий энергией все системы агрегата, и трансмиссию.
В зависимости от параметров агрегата принято использовать следующие схемы приводов:
а) для легких установок – двигатель транспортной базы, т.е. ходовой двигатель серийного автомобильного шасси;
б) для средних и тяжелых установок используют один из двух вариантов:
– палубный двигатель при выполнении агрегата на прицепе, транспортируемом обычным автомобилем-тягачом. При этом число блоков, когда каждый смонтирован на отдельном прицепе, а в целом составляющих единый комплекс, может быть равно двум или трем;
– двигатель, мощность которого определяется согласно условию обеспечения энергией агрегата при монтаже его на специально спроектированном автомобильном шасси. При этом для передвижения используют двигатель агрегата. По существу данный двигатель является палубным, который применяют в качестве ходового. Как и в предыдущем случае, агрегат представляет комплекс, состоящий из двух-трех автономно передвигающихся устройств.
Наиболее простой и рациональной является кинематическая схема легкого агрегата при условии его полной гидрофикации. Последнее позволяет компоновать оборудование агрегата исходя из оптимальных условий взаимного расположения его компонентов как для обеспечения функционирования агрегата на скважине, так и для выполнения требований, предъявляемых к нему как к транспортному средству.
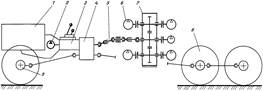
При использовании стандартного автомобильного шасси кинематическая схема установки включает (рис. 17) ходовой двигатель 1, коробку перемены передач 3, коробку отбора мощности 4 (все перечисленные узлы являются неотъемлемой частью шасси), вал отбора 5 мощности, раздаточный редуктор 4, на котором закреплены насосы гидросистемы 6 (число последних определяется особенностями гидравлической схемы агрегата), передний мост 9 и заднюю тележку 8.
В зависимости от типа шасси и конструкции агрегата кинематическая схема раздаточного редуктора может быть последовательной, параллельной или комбинированной.
Последовательная схема предполагает передачу энергии от ведомого вала последовательно через все ступени зубчатой передачи. В этом случае первая ступень передает полную мощность, а каждая последующая – часть ее, за исключением отобранной на предыдущем валу. Параллельная схема предполагает поступление энергии от одного ведущего вала к нескольким ведомым. При этом каждая пара шестерен передает только ту энергию, которая необходима для вращения ведомым валом соединенных с ним насосов. Комбинированная схема основана на совместном использовании двух предыдущих вариантов.
Применение той или иной схемы устанавливается прежде всего по наличию свободного места на шасси транспортной базы и возможной конфигурации раздаточного редуктора. С точки зрения достижения необходимых весовых параметров и показателей надежности наилучшей является схема с параллельными потоками энергии, поскольку она позволяет обеспечивать наиболее благоприятный режим нагружения основных деталей редуктора.
Мощность, передаваемая к гидроприводу установки, зависит от осуществляемых им функций при выполнении конкретных операций.
|
Рис. 17. Кинематическая схема агрегата ПРС легкого типа:1 – ходовой двигатель автомобильного шасси; 2 – насос масляный, входящий в состав силового агрегата шасси; 3 – коробка перемены передач шасси; 4 – коробка отбора мощности; 5 – карданный вал отбора мощности; 6 – насос гидросистемы агрегата; 7 – раздаточный редуктор; 8 – задняя тележка шасси; 9 – передний мост шасси.
Вспомогательные операции заключаются в приведении в действие гидравлических домкратов агрегата и привода грузоподъемных устройств, работающих при развертывании и свертывании установки.
К основным операциям относятся следующие.
Перемещение колонны гибких труб. Можно выделить несколько основных режимов при перемещении труб, например, их движение с максимальной и минимальной скоростью, которые отличаются в 10 – 15 раз и соответственно определяют величины необходимых мощностей. По затрачиваемой мощности следует выделить движение колонны вниз и вверх. В первом случае необходимое давление рабочей жидкости, определяемое настройкой тормозного клапана, минимально. Кроме того, в процессе спуска труб транспортер должен обеспечить усилие, требуемое для разматывания трубы с барабана и перемещения ее через укладчик и канал транспортирования. При этом необходимая мощность минимальна и ее в общем балансе можно принимать равной нулю. Максимальное усилие при перемещении труб будет иметь место при ходе вверх и определяться весом колонны труб и силами трения.
Отметим, что термин "максимальное усилие" не означает максимального усилия, на которое рассчитан транспортер и которое он должен обеспечивать при возникновении аварийной ситуации. К последней следует отнести случай прихвата колонн гибких труб. При возникновении подобной ситуации перемещение последней осуществляется на минимальной скорости.
Наматывание (разматывание) трубы на барабан. При наматывании трубы на барабан привод должен обеспечивать его вращение с крутящим моментом, необходимым для деформирования трубы в процессе ее проводки по всей длине канала. Величина этого момента зависит от диаметра, толщины стенки и прочностных свойств гибкой трубы, но на нее не влияет скорость подъема КГТ.
Частота вращения барабана определяется скоростью перемещения трубы транспортером. При проведении расчетов следует учитывать ее максимальную величину.
При спуске трубы в скважину и сматывании ее с барабана привод не затрачивает энергию на эти процессы. Барабан раскручивается за счет натяжения трубы, создаваемого транспортером.
Нагнетание технологической жидкости в колонну гибких труб. При спуске и подъеме колонны, а также выполнении технологических операций по удалению пробок или бурении в колонну подается технологическая жидкость. Независимо от длины колонны, спущенной в скважину, гидродинамические потери в колонне постоянны и определяются ее длиной. Влиянием кривизны труб, намотанных на барабан, при проведении большинства расчетов можно пренебречь. При проведении технологических операций насос, подающий жидкость, должен преодолевать еще и перепад давления на забойном двигателе либо на гидромониторной насадке.
Подъем и спуск колонны можно выполнять не при максимальной подаче технологической жидкости, а при некотором минимально возможном ее значении, обеспечивающем безопасное выполнение работ. Поэтому при расчетах принимают и минимальную, и максимальную величины подачи.
Для определения необходимой мощности приводного двигателя дан сравнительный анализ мощностей, потребляемых основными узлами агрегата, при выполнении различных технологических операций, качественные оценки которых приведены ниже:
| Комплектующие узлы агрегата .............................. |
Транспортер |
Барабан |
Насосы технологической жидкости | |||
| Параметры узлов ........... | P | v | Mб | vб | pн | Qн |
| Режим работы агрегата: | ||||||
| В том числе: | ||||||
| спуск колонны до рабочей зоны ............. | min | max | min | max | min | min |
| технологические операции: | ||||||
| удаление пробок песчаной ........... | min | min | min | min | max | max |
| гидратной ......... | min | min | min | min | max | max |
| разбуривание пробки .................... | min | min | min | min | max | max |
| бурение скважин | max | min | min | min | max | max |
| расхаживание колонны при прихвате ........................ | max | max | max | min | max | max |
| извлечение колонны труб на поверхность | max | max | max | max | max | max |
Мощность приводного двигателя необходимо определять в зависимости от конкретных значений параметров агрегата и номенклатуры технологических операций, выполняемых им. Как показано выше, параметрический ряд агрегатов подземного ремонта скважин, работающих с колонной гибких труб, должен состоять из трех-четырех типоразмеров. Сделанные расчеты позволили определить мощности, необходимые для выполнения операций при различных параметрах агрегатов. Их результаты представлены на специальной гистограмме, из которой следует, что в случае использования стандартной транспортной базы – автомобильного шасси грузоподъемностью 12 – 16 т, серийно выпускаемого промышленностью, с мощностью двигателя 130 – 180 кВт максимальный диаметр колонны труб составляет 33 мм, а длина – 2000 м.
С помощью транспортной базы такого агрегата можно обеспечить выполнение всех необходимых технологических операций.
Для создания мощных агрегатов необходимы технические решения, базирующиеся на применении либо специальных транспортных средств, либо прицепов, оборудованных палубными двигателями.
Колонна гибких труб
Дата: 2019-07-31, просмотров: 463.