Лекция 1: «Введение в курс».
Переход из одного исходного режима электрической системы ЭС в другой сопровождается переходным процессом. В силу физических свойств ЭС этот переходный процесс является единым по своей природе и должен рассчитываться, строго говоря, на основе общего математического описания. Однако в большинстве практических задач принимают, что переходный процесс состоит из ряда процессов, сменяющих друг друга и характеризующих изменение определенной группы параметров режима.
Переходный процесс в ЭС характеризуется совокупностью электромагнитных и механических изменений в системе. Благодаря довольно большой механической инерции вращающихся электрических машин начальная стадия переходного процесса характеризуется преимущественно электромагнитными изменениями. Эта стадия переходного процесса носит название электромагнитного. В последствии электромагнитный переходный процесс дополняется механическим переходным процессом. Эта стадия переходного процесса носит название электромеханического.
В настоящем курсе мы будем изучать электромагнитные переходные процессы в ЭС, т.е. такие процессы, при расчете которых допустимо не учитывать изменение частоты вращения роторов электрических машин. Электромеханические переходные процессы будут изучаться в следующем курсе.
Причины возникновения и последствия КЗ.
Причиной возникновения КЗ является нарушение изоляции электрического оборудования, вызываемое:
1. старением изоляции;
2. перенапряжениями (коммутационными или атмосферными);
3. неудовлетворительным уходом за оборудованием;
4. ошибками в действиях персонала;
5. механическими повреждениями оборудования ( в сетях до 10кВ).
Наряду с короткими замыканиями случайного характера в системе имеют место также преднамеренные КЗ, вызываемые действием специальных аппаратов – короткозамыкателей.
Последствия КЗ зависят от места их возникновения и продолжительности. Они могут иметь местный характер или отражаться на работе всей системы. КЗ, близкие к источникам питания, могут привести к нарушению параллельной работы генераторов с системой – к выходу их из синхронизма.
При КЗ ток в месте повреждения в несколько раз больше номинального. Поэтому даже при кратковременном протекании токов КЗ он может вызвать дополнительный нагрев токоведущих элементов выше допустимого (термическое действие тока КЗ). Кроме того, токи КЗ вызывают между проводниками большие механические усилия, которые особенно велики в начальной стадии процесса КЗ, когда ток достигает максимального значения (динамическое действие тока КЗ). При недостаточной прочности проводников и их креплений они могут быть разрушены при КЗ. При глубоком понижении напряжения двигатели могут остановиться, что вызовет большой материальный ущерб. При задержке отключения КЗ сверх допустимой продолжительности может произойти нарушение устойчивости ЭС, что является одним из наиболее опасных последствий КЗ.
Назначение расчётов токов КЗ.
1. сравнение, оценка и выбор электрических схем станций и подстанций;
2. выбор аппаратов и проводников;
3. проектирование и настройка устройств релейной защиты и автоматики;
4. анализ работы потребителей в аварийном режиме;
5. оценка и выбор систем возбуждения генераторов;
6. выбор характеристик разрядников;
7. проектирование защитного заземления;
8. расчёт статической и динамической устойчивости ЭС;
9. анализ происшедших аварий;
10. определение влияния ЛЭП на провода связей и сигнализации.
Ние
Ние
Звезду
Ник
Гольник
Лекция 5: «Переходный процесс в простейшей трёхфазной цепи, питаемой от источника бесконечной мощности».
Под источником бесконечной мощности понимается источник, напряжение и частота которого не зависят от изменения условий в сети и остаются постоянными: Sс=¥; Uс=const; f =const (или w=const).
Сопротивление такого источника равно нулю: x1=U12/Sс=-Uс2/¥=0
Рассмотрим простейшую цепь, подключённую к источнику бесконечной мощности. Под простейшей цепью понимают цепь с активными, индуктивными сопротивлениями без трансформаторных связей.
 |
К(3)
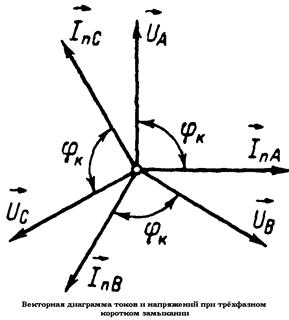
Пусть UA, UB, UC, IA, IB, IC характеризуют предшествующий режим в данной цепи. Векторная диаграмма токов и напряжений в нормальном и переходном режимах выглядит
 Векторная диаграмма для начального момента трехфазного КЗ.
Векторная диаграмма для начального момента трехфазного КЗ.
j-угол сдвига между токами и напряжениями в нормальном режиме, определяется соотношением активных и индуктивных сопротивлений всей цепи.
Короткое замыкание делит цепь на две части, процессы в которых протекают независимо друг от друга. В правой части, зашунтированной коротким замыканием, ток будет поддерживаться до тех пор, пока запасённая в индуктивности L энергия магнитного поля не перейдёт в тепло, выделяемое в активном сопротивлении r. Этот ток при активно-индуктивном характере цепи не превышает тока нормального режима и не представляет опасности для оборудования. В левой же части схемы вследствие уменьшения суммарного сопротивления цепи произойдёт увеличение тока. Этот ток КЗ будет представлять опасность для оборудования, поэтому рассмотрим процессы, протекающие в левой части цепи.
Дифференциальное уравнение, описывающее переходный процесс, имеет вид: U=ikrk + Lk dik/dt, где U и Ik –соответственно мгновенные значения напряжения и тока рассматриваемой фазы.
Решение этого уравнения даёт выражение для мгновенного значения тока в любой момент времени t от начала КЗ:
 (1).
(1).
Как видно из этой формулы, полный ток КЗ слагается из двух составляющих: вынужденной, обусловленной действием напряжения источника (первый член в правой части уравнения), и свободной, обусловленной изменением запаса энергии магнитного поля в индуктивности LK (второй член уравнения).
Вынужденная составляющая тока КЗ имеет периодический характер с частотой, равной частоте напряжения источника. Называют эту составляющую обычно периодической составляющей тока КЗ

где Iп,m - амплитудное значение периодической составляющей тока.
Угол сдвига jк между векторами тока и напряжения определяется соотношением активных и индуктивных сопротивлений цепи КЗ. Для реальных цепей обычно хк >> rк и jк = 45 ¸ 90°. Векторная диаграмма для периодической составляющей КЗ при jk = 90° показана на нижеприведённом рисунке.
 Свободная составляющая тока
Свободная составляющая тока
имеет апериодический характер изменения, на основании чего эту составляющую тока называют также апериодической составляющей тока КЗ.
Начальное значение апериодической составляющей тока КЗ в каждой фазе определится по выражению (1) для момента времени t = 0:
ia ,0 = ik ,0 – i п,0 ; (2)
здесь ik ,0 — начальное значение тока КЗ, которое с учетом невозможности изменения тока скачком в цепи с индуктивностью равно i(0) — току предшествующего режима в данной фазе к моменту t = 0. Значение периодической составляющей тока при t = 0 определится как i п,0 = I п, m ×sin(a - jk). (3)
Представляют определенный интерес условия возникновения максимально возможного значения полного тока КЗ и его апериодической составляющей. Из (2) и (3) при хк >> rк и jк » 90° следует, что максимальное значение тока i a ,0 будет в случае, если напряжение в момент возникновения КЗ проходит через нулевое значение (a = 0) и тока в цепи до КЗ нет, т. е. i(0) = 0. При этом ia,0 = Iп,m . Кривая изменения тока при условии максимального значения апериодической составляющей тока показана на рис.1. Здесь ia,0 = Iп,m .
Максимальное мгновенное значение полного тока наступает обычно через 0,01 с после начала процесса КЗ (рис.1). Оно носит название ударного тока и обозначается iy. Ударный ток определится из (1) для момента времени t = 0,01 с:  ,
,
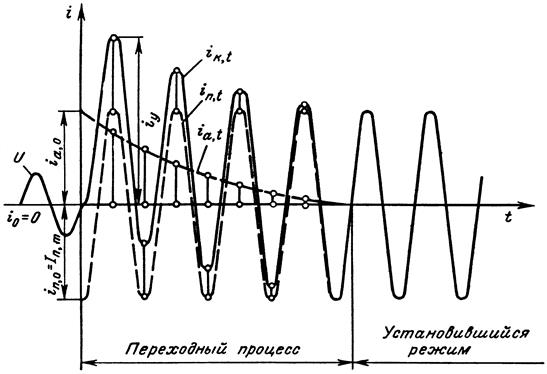
Рис.1 Изменение тока КЗ в цепи, питаемой от шин неизменного напряжения при максимальном значении апериодической составляющей.
или i у = k y × I П, m ,
где k y – ударный коэффициент, зависящий от постоянной времени цепи КЗ:
 .
.
Переходный процесс в случае питания от шин неизменного напряжения завершается после затухания апериодической составляющей тока, и далее полный ток КЗ равен его периодической составляющей, неизменной по амплитуде.
Действующее значение тока для произвольного момента времени КЗ t равно:
периодической составляющей  ;
;
апериодической составляющей I а, t = ia , t ;
полного тока КЗ  .
.
Лекция 6: «Установившийся режим короткого замыкания».
При трёхфазном коротком замыкании переходный процесс характеризуется затуханием свободных апериодических токов; периодический же ток КЗ представляет из себя принуждённый или установившийся ток в цепи. Данное предположение справедливо, если КЗ происходит на относительно большой электрической удалённости от генератора. По мере приближения точки КЗ к генератору увеличивается реакция статора, вызывающая размагничивание генератора, что приводит к уменьшению его напряжения. При наличии автоматического регулирования возбуждения (АРВ) возможно частичное или даже полная компенсация этого снижения напряжения путём увеличения тока возбуждения.
Под установившимся режимом понимают ту стадию процесса короткого замыкания, когда все возникшие в начальный момент КЗ свободные токи практически затухли и полностью закончен подъём тока возбуждения от действия АРВ.
Практически он наступает через несколько секунд после возникновения короткого замыкания.
Приведённое определение установившегося режима соответствует процессу КЗ в схеме с одним генератором. В реальных условиях этот процесс имеет более сложный характер, так как возможны возникновения качаний генератора, при которых обороты СГ отличны от номинальных, что может привести к выпадению его из синхронизма.
Установившегося режима.
Вследствие несимметрии ротора гидрогенератора по осям d,q сопротивления Хd¹Хq. Ротор турбогенератора симметричен, у него Хd»Хq. Выясним, насколько неравенство Хd¹Хq ГГ влияет на точность расчёта токов КЗ.
 |
Векторная диаграмма генератора с явнополюсным ротором, работающим с отстающим током.
К(3)
 r вн = Z вн × cos j и хвн= Z вн × sin j . Из векторной диаграммы Iq = Id × ctg y = = Id × r вн /( xq +хвн). ( 2).
r вн = Z вн × cos j и хвн= Z вн × sin j . Из векторной диаграммы Iq = Id × ctg y = = Id × r вн /( xq +хвн). ( 2).
Подставим (2) в (1) и получим:  . Из выражения (2):
. Из выражения (2):  .
.
Подставим (4) в (1). После преобразования получим:
Полный ток явнополюсного генератора:  .
.
Подставим в это выражение формулы (3) и (5), получим:
для турбогенератора Хd=Xq. Подставим в (6):
 отсюда:
отсюда:
 .
.
Исследуем отношение для гидрогенератора:
IГГ при Хd¹Хq ; IТГ при Хd=Хq.
Наибольшее проявление явнополюсности будет при Zвн=0 (Хвн=0, rвн отбрасывается). При КЗ на выводах генератора:
Из (7): 
Обычно отношение для гидрогенератора Хq/Xd=0.6, то есть Хq=0.6×Хd . (9)
Подставим (9) в (6), тогда получим:
 .
.
Отношение (7) к (10) будет выглядеть как I ТГ / I ГГ =1.03 .
Вывод: погрешность расчёта при отсутствии учёта явнополюсности генераторов составляет 3%, что позволяет принимать в расчётах установившегося режима для всех видов машин Х d = Xq .
Расчёт при наличии АРВ.
Критерием возможного режима работы генератора является сравнение внешнего сопротивления с критическим. Это легко сделать, если в расчётной схеме имеется один генератор. При наличии в схеме нескольких генераторов точно установить режим работы каждого генератора не представляется возможным, поэтому решение ведётся путём последовательного приближения, задаваясь для каждого генератора режимом РПВ или РНН в зависимости от электрической удалённости генераторов до точки КЗ. В режиме РПВ генератор входит в схему замещения своими Еqпр и Хd, в режиме РНН своими Eq=Uн=1 и Хг=0. После этого необходимо выполнить проверку правильности выбранного режима. Она заключается в сопоставлении Iг с Iкр. Если в результате проверки оказалось, что для некоторых генераторов режим работы был выбран неверно, то после замены режимов расчёт выполняют заново с последующей проверкой.
Порядок расчёта: по заданной расчётной схеме составляют схему замещения, в которую генераторы входят своими параметрами согласно предварительно выбранному режиму. Находят параметры схемы замещения, которая сворачивается до получения ЕqS и ХS. Находится ток КЗ I к= Е q S / Х S. Затем схема разворачивается в обратном направлении до получения тока от каждого генератора. Эти токи сравниваются с критическим током. В случае неверно выбранного режима его меняют на другой с последующим повторным расчётом.
Обмотки.
Цель темы: найти параметры генератора (Еq’,Xd’), характеризующие его в начальный момент времени.
Рассмотрим баланс магнитных потоков в оси d генератора при установившемся симметричном режиме с отстающим по фазе током. Баланс магнитных потоков рассматривается при отсутствии насыщения, что позволяет каждый поток и его составляющие рассматривать независимо друг от друга.
 Фf0 - полный магнитный поток от тока If0 (IВ0);
Фf0 - полный магнитный поток от тока If0 (IВ0);
Фsf0 – магнитный поток рассеяния обмотки возбуждения;
Фd0- полезный магнитный поток;
Фdd0- магнитный поток в воздушном зазоре генератора; Фаd0- магнитный поток размагничивающей реакции статора; Фfå0- результирующий магнитный поток.
 При внезапном нарушении режима ток статора Id0 увеличивается на DId(0). Это приращение тока статора приводит к увеличению размагничивающей реакции статора на DФаd(0). При t=0 генератор рассматривается как трансформатор, поэтому по закону Ленца приращение DId(0) (DФаd(0)) вызовет ответную реакцию ротора на DIf(0) (DФf(0)) , причем эти приращения должны компенсировать друг друга. DФаd(0) + DФf(0) = 0.
При внезапном нарушении режима ток статора Id0 увеличивается на DId(0). Это приращение тока статора приводит к увеличению размагничивающей реакции статора на DФаd(0). При t=0 генератор рассматривается как трансформатор, поэтому по закону Ленца приращение DId(0) (DФаd(0)) вызовет ответную реакцию ротора на DIf(0) (DФf(0)) , причем эти приращения должны компенсировать друг друга. DФаd(0) + DФf(0) = 0.
Считая, что потокосцепления выражены в относительных единицах и параметры ротора приведены к Магнитные потоки в продольной статору, равенство можно переписать:
оси ротора без демпферных обмоток. D I d(0) × Х а d + D I f(0) ×Х f =0 или
D Id(0) × Ха d + D If(0) × ( Х s f + Ха d ) =0.
Из этого выражения видно, что DId(0) было бы равно DIf(0) при отсутствии рассеяния обмотки ротора. Из этого следует вывод – чем меньше рассеяние, тем полнее будет компенсация размагничивающей реакции статора.
В ненасыщенной машине поток рассеяния ротора составляет постоянную долю от Фf0, которая характеризуется коэффициентом рассеяния обмотки возбуждения sf :
sf =  . Определим ту часть от Фfå , которая связана с обмоткой статора yd’= (1- sf) × Фfå. Получим выражение:
. Определим ту часть от Фfå , которая связана с обмоткой статора yd’= (1- sf) × Фfå. Получим выражение:
Потокосцепление yd’ наводит в обмотке статора ЭДС Еq’:

Е q ’= Uq + j Id × Xd’ , где
 |
 Еq’- поперечная составляющая переходной ЭДС Е’;
Еq’- поперечная составляющая переходной ЭДС Е’;
Xd’ – продольная реактивная проводимость синхронного генератора.
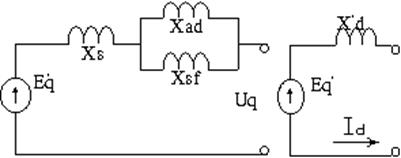
Схема замещения синхронного генератора в переходном режиме для t=0.
 |
Векторная диаграмма
явнополюсной машины.
Еq(0)’=Eq0’
Нужно отметить, что ЭДС Еq’ остаётся равной значению ЭДС в конце предшествующего режима лишь в начальный момент переходного процесса. По мере того, как свободный поток DФf(0).будет затухать (апериодически), реакция якоря Фad будет нарастать. Вследствие размагничивающего характера реакции якоря результирующий поток ФfS будет уменьшаться, что приведёт к уменьшению ЭДС генератора.
Лекция 9: «Сверхпереходные ЭДС и реактивность синхронного генератора с успокоительной обмоткой».
Цель темы: определить параметры генератора (Еq’’ , Xd’’), характеризующие
его для t=0.
Демпферные (успокоительные) обмотки представляют собой короткозамкнутые стержни, уложенные в полюса ротора генератора. Их назначение в быстрой стабилизации процесса после пуска генератора, после различных коммутаций. Различают продольную и поперечную демпферные обмотки. В нормальном режиме при номинальных параметрах генератора ток в успокоительной обмотке равен нулю. При n>nНОМ возникает ток, создающий тормозной момент. Обороты ротора уменьшаются. При n<nНОМ ток успокоительной обмотки создаёт момент, ускоряющий вращение ротора. При наличии успокоительной обмотки должен быть учтён поток DФаq и составляющая ЭДС по продольной оси. Наличие успокоительной обмотки не обеспечивает магнитной симметрии ротора, что вынуждает определять параметры генератора в осях d и q. Внезапное увеличение тока статора Id0 на величину DId(0) по закону Ленца вызовет ответную реакцию ротора на DФf(0) и реакцию успокоительной обмотки на DФD(0) . При увеличении реакции якоря при КЗ в ОВГ и демпферной обмотке появятся свободные токи, вызывающие свободные токи в роторе по продольной оси:
Ifa(0)=ifa(0)×e-t/T’d + ifa(0)×e-t/T’’d - апериодическая составляющая тока возбуждения.
iDa=iDa(0)×e-t/T’d+ iDa(0)×e-t/T’’d – апериодическая составляющая тока продольной демпферной обмотки.
iQa=iQa (0)× e-t/T’’q – апериодическая составляющая тока поперечной оси демпферной обмотки.
ia=ia (0)×e-t/Ta – свободная апериодическая составляющая тока статора.
Где Td’=  , а Ta=
, а Ta=  .
.
Нужно отметить, что начальное значение апериодической составляющей тока возбуждения в рассматриваемом случае будет меньше, чем в случае рассмотрения генератора без демпферных обмоток. Это объясняется тем, что увеличение реакции якоря на DФad должно компенсироваться суммарным действием ОВГ и продольной демпферной обмоткой: DФаd=DФf+DФD, то есть величина тока if(0) может быть меньше, чем в генераторе без демпферной обмотки. Так же, как в рассмотренном выше случае, свободные апериодические токи вызовут в соответствующих обмотках свободные периодические составляющие токов, а в обмотке статора под их действием появятся составляющие двойной частоты.
Ток в статоре: ik=iа + ip¥ + ip’ + ip” +ip(2w), где iа – апериодическая составляющая тока; ip¥ - вынужденный установившийся периодический ток; ip’ – периодический затухающий ток; ip” – сверхпереходная составляющая тока статора; ip(2w) – затухающая периодическая слагающая двойной частоты.
Токи в роторе:
if=ifo + ifa + ifp
iD=iDa + iDp
iQ=iQa + iQp
В нормальном режиме обмотка возбуждения и успокоительная обмотках характеризуются коэффициентами рассеивания sf и sd. Совмещённый коэффициент рассеивания:  .
.
Потокосцепление, связанное с обмоткой статора y d ” = (1- s Fd ) y f S ×
По аналогии с предыдущей лекцией Е q ”= Uq + j Id × Xd”, а сверхпереходная реактивность 
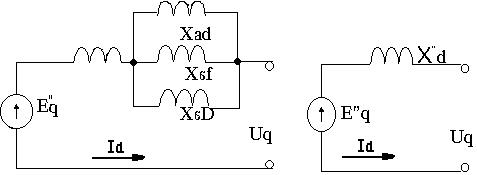 |
Схема замещения синхронной машины в оси d:
Сверхпереходную ЭДС Еq” находят по выражению:
Еq"=Ö(U(0)cosj(0))2 +( U(0) sinj(0) + I(0)×xd”)2.
В силу того, что Еd” гораздо меньше Еq” в практических расчётах Еd” можно не учитывать. При точных же расчётах:
I"d= E"q/ (X"d + XВН) , I"q= E"d / (X"q + XВН), I"= Ö(I"d2 + I"q2).
Рассмотрим теперь как будет происходить процесс КЗ при включённом АРВ. В этом случае снижение напряжения при КЗ компенсируется увеличением тока возбуждения, причём при снижении напряжения ниже 0.85Uн срабатывает форсировка возбуждения, обеспечивающая нарастание возбуждения генератора до предельного значения: Uf=Uf0+DUfпр(1- e-t/Te), где DUfпр = Ufпр - Uf0 , - предельное приращение напряжения на кольцах обмотки возбуждения Te = 0.3¸0.6 сек – постоянная времени нарастания напряжения.
При увеличении if возрастает магнитный поток Фf, что приводит к увеличению ЭДС генератора и тока КЗ. Все АРВ действуют с небольшим запаздыванием. Кроме того, значительная индуктивность ОВГ приводит к задержке увеличения тока ротора. В результате этого действие АРВ начинает проявляться только спустя некоторое время после возникновения КЗ. Из сказанного следует, что АРВ не влияет на ток КЗ в первый момент КЗ. Начальные значения периодической и апериодической составляющих токов КЗ, процесс затухания апериодической составляющей, а следовательно, и ударный ток остаются такими же, что и рассмотренном выше случае работы генератора без АРВ.
Времени».
Синхронные двигатели СД и компенсаторы СК в начальный момент КЗ ведут себя точно также как синхронные генераторы СГ. Различия в их поведении определяется, в сущности, величинами их сверхпереходных ЭДС. Если СД работал в перевозбуждённом режиме, то у него Е” будет выше подведённого напряжения. Такой двигатель будет подобно генератору отдавать реактивный ток в сеть и при КЗ величина этого тока возрастает.
Если СД работал в недовозбуждённом режиме, то у него E” меньше подведённого напряжения. Здесь в зависимости от степени снижения напряжения при КЗ в сети возможно как потребление реактивного тока из сети (при Е”(0)<U(0)), так и генерация реактивного тока (при Е”(0)>U(0)). Очевидно, при Е”(0)=U(0) ток в начальный момент КЗ будет отсутствовать.
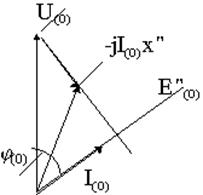 Теперь обратимся к асинхронному двигателю АД, составляющим основную часть промышленной нагрузки. В начальный момент КЗ пренебрегают небольшим скольжением (до 5%), с которым АД работал в нормальном режиме, и рассматриваем его как недовозбуждённый генератор. Схема замещения АД аналогична схеме замещения СГ, только из-за симметрии этой машины отпадает необходимость разложения по осям d и q. Ниже представлена векторная диаграмма асинхронного двигателя АД.
Теперь обратимся к асинхронному двигателю АД, составляющим основную часть промышленной нагрузки. В начальный момент КЗ пренебрегают небольшим скольжением (до 5%), с которым АД работал в нормальном режиме, и рассматриваем его как недовозбуждённый генератор. Схема замещения АД аналогична схеме замещения СГ, только из-за симметрии этой машины отпадает необходимость разложения по осям d и q. Ниже представлена векторная диаграмма асинхронного двигателя АД.

Из этой диаграммы следует:
где  - предшествующие напряжение,
- предшествующие напряжение,
ток и угол сдвига между их векторами.
Сопротивления АД определится как: X ”= U *Н / I *ПУСК =1/3 ¸ 5=0.2 ¸ 0.35.
Таким способом определяют Е” и X” только крупных АД (это касается и СД), которые могут оказать влияние на ток КЗ. На практике все остальные двигатели вместе с другими нагрузками учитывают усреднёнными параметрами:
Е”НАГ = 0.85 и Х”НАГ = 0.35 ,
считая их выраженными в относительных единицах, приведёнными к номинальной мощности нагрузки и среднему напряжению ступени, где она присоединена.
Синхронные машины.
Магнитный поток, созданный токами ОП синхронной частоты вращается относительно ротора с двойной частотой 2f. Магнитное сопротивление на пути этого потока отличается от магнитного сопротивления потоку, созданному токами ПП. Поэтому, в общем случае, для вращающихся машин Х2¹Х1:
для синхронных машин без демпферных обмоток  , то же, с демпферными обмотками
, то же, с демпферными обмотками  .
.
В практических расчётах для турбогенераторов и машин с продольно – поперечными демпферными обмотками можно принять Х2»Хd”.
Обобщённая нагрузка.
Сопротивления ОП обобщённой нагрузки зависит от характера приёмников электрической энергии. Анализ потребителей показал, что для сети 6-10кВ Z2=0.18+j0.24=|0.35|; для сети 35кВ и выше Z2=0.19+j0.36=|0.45|.
В приближённых расчетах для всех видов нагрузок независимо от места их присоединения принимают Х2=0.35.
Асинхронные двигатели.
Ротор АД симметричен, поэтому в статоре высшие гармоники не возникают. Таким образом, для АД Х2=Х1=1 / I*ПУСК.
Воздушные ЛЭП.
Ток НП воздушной ЛЭП возвращается через землю и по заземлённым цепям, расположенных параллельно данной ЛЭП. Система токов НП не уравновешена (SI0¹0), поэтому создаваемый ею магнитный поток наводит в контурах, расположенных вблизи ЛЭП ЭДС, которые вызывают в них компенсирующие токи. В этих условиях сопротивления НП существенно отличаются от сопротвления ПП.
Сопротивление НП ЛЭП определяется индуктивным сопротивлением самоиндукции ХL контура провод-земля и индуктивным сопротивлением взаимоиндукции ХМ провода данной фазы с проводами двух других фаз: Х0= ХL+2 ХМ.
Если вспомнить, что сопротивление линии ПП Х1= ХL - ХМ, то видно, что сопротивление НП по величине больше, чем Х1. Если линия защищена заземлённым грозозащитным тросом, то обратный ток частично протекает в земле, а частично в тросе. Расстояние между проводами и тросом значительно меньше расстояния от проводов до тока в земле, глубина протекания которого в земле составляет 500-700 метров. Поэтому индуктивность контура провод-трос меньше индуктивности контура провод-земля. В результате этого заземлённый трос уменьшает индуктивное сопротивление НП линии.
Если линия двухцепная, то сопротивление НП возрастает благодаря взаимоиндукции между параллельными цепями.
В практических расчётах можно пользоваться следующими отношениями между Х0 и Х1 для воздушных линий:
| Тип линии | Х0 / Х1 |
| Одноцепная линия без тросов | 3.5 |
| То же, с тросами | 2.0 |
| Двухцепная линия без тросов | 5.5 |
| То же, с тросами | 3.0 |
Для кабельных ЛЭП усреднённое значение r0»10×r1 , x0»(3.5¸4.7)×x1.
Силовые трансформаторы.
Сопротивление НП трансформатора в значительной мере определяется его конструкцией и схемой соединения обмоток.
 Если обмотка трансформатора со стороны точки КЗ соединена в «D» или «U» без заземления нейтрали, то сопротивление НП Х0=¥, так как в этих случаях исключается возможность циркуляции токов НП независимо от того, как соединены другие обмотки. следовательно, определённая величина Х0Т может быть у трансформатора со стороны обмотки, соединённой в звезду с заземлённой нейтралью.
Если обмотка трансформатора со стороны точки КЗ соединена в «D» или «U» без заземления нейтрали, то сопротивление НП Х0=¥, так как в этих случаях исключается возможность циркуляции токов НП независимо от того, как соединены другие обмотки. следовательно, определённая величина Х0Т может быть у трансформатора со стороны обмотки, соединённой в звезду с заземлённой нейтралью.
Х0=Х1
Х0=Х1Т + Хm0 2Т
Х0=ХI + Хm0
Х0=ХI + ХII
Х0=ХI+(ХII×ХIII) / (ХII+ХIII)+×××
Х0= ХI+(ХII×ХIII) / (ХII+ХIII)
Выше представлены схемы замещения трансформаторов для токов НП.
Автотрансформаторы.
Обмотки АТ связаны между собой не только магнитно, но и электрически, поэтому протекание в них токов НП имеет некоторые особенности, которые отражаются в схеме замещения НП АТ.
При глухом заземлении нейтрали АТ его схема замещения НП аналогична схеме соответствующего трансформатора.

Схемы замещения АТ для токов нулевой последовательности.
Лекция 13: «Схемы замещения отдельных последовательностей».
Двухфазное КЗ.

Векторные диаграммы напряжений и токов
двухфазного КЗ.
Граничные условия в месте КЗ:
1 IKA(2)=0 ;
2 IKВ(2)= - IKС(2);
3 UKВ(2)= UKС(2);
Перепишем (2): IKВ(2) + IKС(2) = 0 (4).
Сложив (1) и (4), получим: IKA(2) + IKВ(2) + IKС(2) = 0, то есть система токов уравновешенная и IK0=1/3 ×(IKA +IKB +IKC) = 0.
Перепишем (1) через симметричные составляющие:
IKA(2) = IKA1(2) + IKA2(2) + IKA0(2) = 0.
Так как IKA0(2) = 0, то IKA1(2) = - IKA2(2) (5).
Выразим UKВ(2) и UKС(2) через симметричные составляющие:
UKВ(2) = а2× UKА1 +а× UKА2 + UKА0.
UKС(2) = а× UKА1 +а2× UKА2 + UKА0.
Из выражения (3) следует:
(а2 – а)× UKА1 +(а-а2)× UKА2 = 0
(а2 – а)×( UKА1 - UKА2) = 0
так как (а2 – а) ¹0, то UKА1 = UKА2 (6).
Вспомним, что UKА1(2)=ЕS - jХ1S×IKA1 и UKА2 = 0 – jХ2S×IKA2.
С учётом (5) и (6), имеем
 (7)
(7)
токи в фазах:
IKA(2) = IKA1(2) + IKA2(2) + IKA0(2) = 0
IKB(2) = а2IKA1(2) + аIKA2(2) + IKA0(2) = (а2 – а)× IKА1 = - jÖ3× IKA1(2)
IKC(2) = аIKA1(2) + а2IKA2(2) + IKA0(2) = (а – а2)× IKА1 = + jÖ3× IKA1(2)
Напряжения в точке КЗ:
Так как UK0(2) = jX0S× IKA0(2) = 0, то
UKА(2) = UKА1 + UKА2 = 2 UKА1 = - j2×X2S× IKA2(2) = + j2×X2S× IKA1(2)
UKВ(2) = а2× UKА1 +а× UKА2 = - UKА1 = j2×X2S× IKA2(2) = - j2×X2S× IKA1(2)
UKС(2) = а× UKА1 +а2× UKА2 = - UKА1 = UKВ(2)
Однофазное КЗ.

Векторные диаграммы напряжения и токов однофазного КЗ на землю.
Граничные условия для однофазного КЗ:
1. UKA(1) = 0 ;
2. IKВ(1) = 0 ;
3. IKC(1) = 0 ;
Симметричные составляющие токов с учётом (2) и (3):
IKA1(1) = 1/3 (IKA(1) + аIKВ(1) + а2IKС(1) ) = 1/3 IKA(1)
IKА2(1) = 1/3 (IKA(1) + а2IKВ(1) + аIKС(1) ) = 1/3 IKA(1)
IKА0(1) = IKA(1) + IKВ(1) + IKС(1) = 1/3 IKA(1)
Отсюда видно, что IKA1(1) = IKА2(1) = IKА0(1) = 1/3 IKA(1)
Для повреждённой фазы:
UKА(1) = UKА1 + UKА2 + UKА0 = 0 (4)
Вспомним три уравнения с шестью неизвестными, составленными для схем замещения ПП, ОП и НП:
 Е1S = UKA1 + jХ1S×IKA1
Е1S = UKA1 + jХ1S×IKA1
0 = UKA2 + jХ2S×IKA2 (5)
0 = UKA0 + jХ0S×IKA0
Просуммируем систему уравнений (5):
ЕS - jХ1S×IKA1 - jХ2S×IKA2 - jХS0×IKA0 = UKА1 + UKА2 + UKА0 = 0
Откуда:
 ;
;
Ток в повреждённой фазе IKA(1) = 3 IKA1(1).
Симметричные составляющие напряжения в месте КЗ:
UKА2(1) = 0 - j×X2S× IKA2(1) = - j×X2S× IKA1(1)
UKА0(1) = 0 - j×X0S× IKA0(1) = - j×X0S× IKA1(1)
Из уравнения (4) UKА(1) = - (UKА2 + UKА0 )= j×(X2S + X0S )×IKA1(1)
Фазные напряжения в точке КЗ:
UKВ(1) = а2× UKА1 +а× UKА2 + UKА0
UKС(1) = а× UKА1 +а2× UKА2 +UKА0
Векторные диаграммы токов и напряжений показаны в начале темы.
Лекция 1: «Введение в курс».
Переход из одного исходного режима электрической системы ЭС в другой сопровождается переходным процессом. В силу физических свойств ЭС этот переходный процесс является единым по своей природе и должен рассчитываться, строго говоря, на основе общего математического описания. Однако в большинстве практических задач принимают, что переходный процесс состоит из ряда процессов, сменяющих друг друга и характеризующих изменение определенной группы параметров режима.
Переходный процесс в ЭС характеризуется совокупностью электромагнитных и механических изменений в системе. Благодаря довольно большой механической инерции вращающихся электрических машин начальная стадия переходного процесса характеризуется преимущественно электромагнитными изменениями. Эта стадия переходного процесса носит название электромагнитного. В последствии электромагнитный переходный процесс дополняется механическим переходным процессом. Эта стадия переходного процесса носит название электромеханического.
В настоящем курсе мы будем изучать электромагнитные переходные процессы в ЭС, т.е. такие процессы, при расчете которых допустимо не учитывать изменение частоты вращения роторов электрических машин. Электромеханические переходные процессы будут изучаться в следующем курсе.
Дата: 2019-07-30, просмотров: 432.