Исходные данные и цель расчета. Передача винт - гайка качения выходит из строя в результате усталости поверхностных слоев шариков, гайки и винта, потери устойчивости винта, износа элементов передачи и снижения точности. Возможными причинами выхода ее из строя являются: слишком большая нагрузка на винт, низкая расчетная долговечность, значительный относительный перекос винта и гайки, неудовлетворительная защита от загрязнений. Цель расчета передачи состоит в определении номинального диаметра винта d0 и в подборе по каталогу такой передачи, которая удовлетворяла бы всем требованиям к работоспособности.
Исходные данные для расчета передачи - длина винта, его наибольшая расчетная длина, способ установки винта на опорах, ряд значений осевой нагрузки на передачу, ряд частот вращения винта (гайки). Крутящий момент на ходовом винте, Н*м:
 ,
,
где М - крутящий момент на валу двигателя;
 - КПД цепи от двигателя к винту;
- КПД цепи от двигателя к винту;
i - передаточное отношение этой цепи.
Окружная сила на радиусе резьбы, Н:
 ,
, 
Осевая сила, действующая на винт, Н:

где  - угол подъема резьбы;
- угол подъема резьбы;
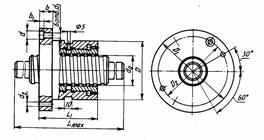
Рис. 2.5. Основные размеры передачи ВГК с двумя гайками в круглом корпусе.
Таблица 5 - Основные размеры (мм) передачи ВГК
| d0 | p | D | D1 | D2 | d | d1 | d2 | L1 | b | b1 |
| 32 | 5 | 60 | 95 | 75 | 14 | 9 | 5,8 | 80 | 16 | 8 |
р=arctgf - угол трения (f-коэффициент трения качения, f=(57. . . 85) ×10-5).
 ,
,  Н
Н
Предельно допустимая нормальная статическая нагрузка на один шарик. Эту нагрузку (Н) определяют по зависимости:

где  - коэффициент, зависящий от допустимого контактного напряжения на поверхности шарика
- коэффициент, зависящий от допустимого контактного напряжения на поверхности шарика  (при = 2500; 3000; 3500 и 3800 МПа соответственно
(при = 2500; 3000; 3500 и 3800 МПа соответственно  = 20; 35; 55 и 70; для обычно применяемой передачи = 70); d1=0,6×t=0,6×5=3мм – диаметр шарика.
= 20; 35; 55 и 70; для обычно применяемой передачи = 70); d1=0,6×t=0,6×5=3мм – диаметр шарика.  Н
Н
Статическая грузоподъемность передачи.
Статическая грузоподъемность С0-это предельно допустимая осевая нагрузка на винт, в результате действия которой возникает общая остаточная деформация тел качения, гайки и винта в наиболее нагруженной зоне контакта, равная 0,0001 диаметра тела качения:
 ,
,
где и=8 - число витков в гайке;
 - угол контакта шарика с винтом и гайкой;
- угол контакта шарика с винтом и гайкой;
 =0,7. . . 0,8 - коэффициент, учитывающий погрешности изготовления резьбы винтового механизма
=0,7. . . 0,8 - коэффициент, учитывающий погрешности изготовления резьбы винтового механизма

Расчет силы предварительного натяга.
Предварительный натяг, повышая осевую жесткость передачи, увеличивает момент холостого хода и снижает ее долговечность, поэтому сила предварительного натяга должна быть выбрана обоснованно.
За минимально допустимую силу натяга PНmin (Н), отнесенную к одному шарику, принимают такую силу, которая обеспечивает сохранение предвари - тельного натяга в винтовой передаче при действии продольной силы Q:
 , где
, где  -
-
рабочее число шариков в одном витке

Наибольшая допустимая сила натяга, отнесенная к одному шарику, при которой сохраняется статическая прочность механизма, Н:

В зависимости от требуемой жесткости передачи, ее долговечности, допускаемого нагрева винта и особенностей измерительного преобразователя перемещений силу натяга выбирают чаще всего
 .
.
Расчет передачи на динамическую грузоподъемность.
Динамической грузоподъемностью передачи С называют такую постоянную осевую нагрузку, которую должен выдержать шарико-винтовой механизм в течение 106 оборотов.
Поскольку в процессе работы станка на винтовую передачу действуют разные по значению, направлению и времени воздействия нагрузки, а частота вращения винта не остается постоянной, методика выбора передачи по динамической грузоподъемности требует определения эквивалентной нагрузки и эквивалентной частоты вращения.
Если в шарико-винтовой механизм входят две гайки, эквивалентную нагрузку находят для каждой из них.
Пусть на передачу со стороны первой гайки действуют осевые нагрузки Q1(1), Q2(1),…,Qk(1) при соответствующих частотах вращения винта (гайки) n1(1), n2(1),…, nk(1), в течение интервалов времени t1(1), t2(1),…, tk(1) (табл. 4. 2).
Тогда силы, действующие на первую гайку передачи,
 ,
,
где РН - сила предварительного натяга в шарико-винтовом механизме.
В этом случае вторая гайка нагружена силами
Если со стороны второй гайки действуют осевые нагрузки Q1(2), Q2(2),…,Qs(2) при соответствующих частотах вращения винта (гайки) n1(2), n2(2),…, ns(2), в течение интервалов времени t1(2), t2(2),…, ts(2), то она нагружена силами:
 ,
,
а первая:
Средняя частота вращения винта при постоянной нагрузке
Таблица 6 - Режимы нагрузки винта в течении его эксплуатации
| Относительное время работы в долях от общего, t | Частота вращения винта n, об/мин | Осевая нагрузка Q, Н |
| 0,45 | 0,05 | 4908 |
| 0,3 | 10 | 3857 |
| 0,2 | 62 | 3155 |
| 0,05 | 380 | 490 |
Силы, действующие на первую гайку передачи:
 Н
Н
 Н
Н
 Н,
Н,  Н
Н
Силы, действующие на вторую гайку передачи:
 Н,
Н,  Н
Н
 Н,
Н,  Н
Н
Средняя частота вращения винта при постоянной нагрузке

Эквивалентная нагрузка:
Допустимая продолжительность работы механизма, выраженная в оборотах,

Допустимая продолжительность работы механизма, выраженная в часах:

Так как требуемую продолжительность работы механизма до наступления усталости любого его элемента принимают равной около 10000 часов, то можно оставить параметры текущего механизма.
Расчет винта на устойчивость по критической осевой силе. Если достаточно длинный винт работает на сжатие, его проверяют на устойчивость при наибольшем тяговом усилии Q, принимаемом за критическую силу. С учетом того что момент инерции сечения винта определяют не для минимального его диаметра, а условного d0, получают приближенную зависимость
 ,
,
где Е =20×105 - модуль упругости материала винта;
 3216
3216
- момент инерции сечения винта;
 - коэффициент, зависящий от характера заделки концов винта (если оба конца винта защемлены, принимают равным 0,5; при одном защемленном конце и размещении второго на шарнирной опоре, имеющей возможность смещаться в осевом направлении, = 0,707; при обеих шарнирных опорах = 1; при одном защемленном конце и втором свободном = 2);
- коэффициент, зависящий от характера заделки концов винта (если оба конца винта защемлены, принимают равным 0,5; при одном защемленном конце и размещении второго на шарнирной опоре, имеющей возможность смещаться в осевом направлении, = 0,707; при обеих шарнирных опорах = 1; при одном защемленном конце и втором свободном = 2);
l=350 - наибольшее расстояние между гайкой и опорой винта.
 H
H
Расчет винта на устойчивость по критической частоте вращения. В моменты быстрых перемещений рабочего органа станка, когда винт вращается с высокой частотой, центробежные силы могут вызвать потерю его устойчивости, что проявляется в наступлении вибраций, Критическая частота вращения винта (об/мин)  , где d - внутренний диаметр резьбы винта, мм; v - коэффициент, зависящий от способа заделки винта (если один конец винта заделан жестко, второй свободный, v принимают равным 0,7; в случае обоих опорных концов
, где d - внутренний диаметр резьбы винта, мм; v - коэффициент, зависящий от способа заделки винта (если один конец винта заделан жестко, второй свободный, v принимают равным 0,7; в случае обоих опорных концов  =2,2; если один конец заделан жестко, другой опорный, v=3,4; когда оба конца заделаны жестко
=2,2; если один конец заделан жестко, другой опорный, v=3,4; когда оба конца заделаны жестко  =4,9); k=0,5. . 0,8 – коэффициент запаса; l – расстояние между опорами винта, мм
=4,9); k=0,5. . 0,8 – коэффициент запаса; l – расстояние между опорами винта, мм
 об/мин
об/мин
Расчет на жесткость.
Необходимый диаметр ходового винта d0 можно определить из условия обеспечения жесткости привода, которая связана с жесткостью шарико-винтового механизма jM, винта jв и его опор j0:

Осевая жесткость привода оказывает влияние на возможность возникновения и его резонансных колебаний.
Чтобы не допустить резонансного режима, собственную частоту колебаний механической части привода j принимают в 3-3,5 раза больше, чем частота f1 импульсов, вырабатываемых системой измерения перемещений.
Для крупных станков f1= 10. . . 15 Гц, для средних и малых f1= 15. . . 25 Гц. Исходя из допустимой частоты колебаний механически части привода f, определяют его требуемую жесткость (Н/мкм):

m - масса узлов механической части привода (ходового винта, исполнительного узла и установленных на нем приспособления, заготовки), кг.
Жесткость шарико-винтового механизма с предварительным натягом и возвратом шариков через вкладыши при


где ks= 0,3. . . 0,5 - коэффициент, учитывающий погрешности изготовления гайки, а также деформации в винтовом механизме и во всех его стыках.
Наименьшая жесткость ходового винта зависит от способа установки его на опорах. При защемлении обоих концов (Н/м):

Приближенное значение жесткости опор винта (Н/мкм):

e=5; 10; 30 соответственно для радиально-упорных, шариковых и ролипорных подшипников; d0-в мм.
Дата: 2019-07-24, просмотров: 374.