МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
УЖГОРОДСЬКИЙ НАЦІОНАЛЬНИЙУНІВЕРСИТЕТ
КАФЕДРА ПРИЛАДОБУДУВАННЯ
РОЗРАХУНКОВА РОБОТА №2
З дисципліни: OPKEP
Інженерно-технічний факультет
Група НАЕПС – 3
Студент Фучко О.П
Шифр - 67
Ужгород - 2008
Зміст
Вступ
1. Плоско пасова передача
1.1 Загальні відомості
1.2 Ремені і шківи
1.3. Кінематичні параметри
1.3.2 Геометричні параметри
1.3.2 Геометричні параметри
2 Пружини
2.1. Призначення та конструкції пружин
Розрахунок гвинтових циліндричних пружин
Розрахунок гвинтових циліндричних пружин розтягу та стиску
Розрахунок гвинтових циліндричних пружин кручення
3.1 Загальні положення
3.2 Основні схеми кулачкових механізмів
3.3 Основні параметри кулачкових механізмів
3.4 Побудова графіка переміщень штовхальника при заданому профілі кулачка
3.5 Поняття про кут тиску
3.5.1 Виведення формули для кута тиску в кулачковому механізмі
3.5.2 Поняття про відрізок кінематичних відношень
3.6 Синтез (проектування) кулачкових механізмів по заданому закону руху штовхальника
3.6.1 Побудова закону руху осі штовхальника
3.6.2 Визначення мінімального радіуса кулачкової шайби по відомому закону руху штовхальника
3.6.3 Побудова профілю кулачка
Вступ
На сучасному етапі науково-технічного прогресу приладобудування займає дуже важливу позицію. Повсякденне життя людини неможливо уявити без використання усілякого роду приладів. Вони застосовуються у всіх галузях народного господарства. Отже приладобудування є однією з провідних галузей інженерії.
Вагома роль успіху при створенні нової техніки вирішується тим, як підготовлений інженер. А саме: як він використовує набуті знання при розв’язку поставлених задач.
Створення нових приладів потребує глибоких навичок та практичного досвіду. Найважливіша задача при створенні нового приладу в тому, щоб при заданих вхідних параметрах отримати необхідні вихідні, застосовуючи такі елементи які б забезпечували всі необхідні вимоги по міцності, пластичності, довговічності та надійності, а також по технологічності та економічності.
Розробка елементів, які б забезпечували ці параметри, пов′язана із тривалими розрахунками, що значно ускладнює процес створення нових розробок. Для прискорення розрахунків застосовують різні системи автоматичного проектування, однією з них є комп′ютерна програма APM WinMashine, яка дозволяє проводити розрахунок практично усіх механічних частин приладів. Ця програма була використана при виконанні даної курсової роботи.
ПЛОСКОПАСОВА ПЕРЕДАЧА
Загальні відомості
Пасова передача відноситься до передач тертям з гнучким зв'язком. Вона складається з двох або декількох шківів, що охоплюються гнучким ременем, надітим на шківи з натягом (рис. 1.1).
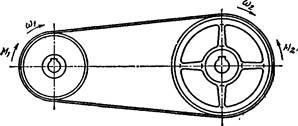 |
Рис. 1.1 Пасова передача
Передаточне відношення даного типу передач знаходяться в межах i = 4... 10, і лише при дуже малому передавальному моменті його збільшують до 15... 16.
До переваг ремінних передач відносяться хороші амортизуючі і демпфуючі властивості, безшумність, здатність служити запобіжною ланкою при випадкових перевантаженнях, простота конструкції, знижені вимоги до точності виготовлення і монтажу, менша початкова вартість, можливість передавати обертання при великих міжосьових відстанях і можливість здійснення безступінчатого регулювання швидкості.
У порівнянні із зубчатими, ремінні передачі мають наступні недоліки: великі габаритні розміри, менший ККД, меншу довговічність, великі експлуатаційні витрати і непостійність передавального відношення із-за наявності ковзання ременя по шківу.
Однією з переваг ремінних передач є універсальність в розташуванні осей валів.
Так, в ремінній передачі компресора є два шківи: обертання і передача корисного навантаження здійснюються від ведучого шківа, пов'язаного з двигуном, на ведений, пов'язаного з робочим органом. Привід вентилятора і генератора у автомобільних двигунів включає трьохшківну передачу.
Для забезпечення необхідної сили тертя між ременем і шківами, ремінь повинен бути натягнутий. Натягнення ременя - основна умова роботи пасових передач. Його може бути створено:
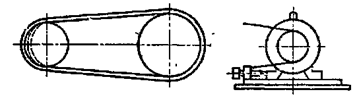
— за рахунок пружності ременя укороченням його при зшиванні (рис. 1.2, а);
— пересуванням одного валу (рис. 1.2, б);
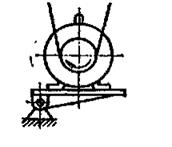
—автоматично, масою системи, що коливається (рис.1.2,в);
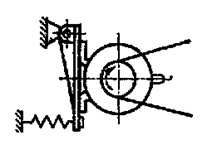
—силою пружини, що діє на систему (рис. 1.2, г);
а) б)
в) г)
Рис. 1.2 Види пасових передач
Величину натягу при першому способі важко контролювати. Як правило, натяг виявляється більшим за необхідний. При другому способі натягнення встановлюється по найбільшому навантаженню, і воно постійне. Оскільки на практиці більшість передач працюють із змінним режимом навантаження, то ремені з постійним попереднім натягом у період недовантажень виявляються натягнутими більше, ніж необхідно для передачі корисного навантаження, що негативно позначається на довговічності паса. Залежно від виду ременя розрізняють передачі плоскоремінні, клиноремінні, поліклинові і круглоремінні (рис. 1.3, а...г).

а) б) в) г)
Рис. 1.3 Типи пасів
Плоскоремінна передача. У цій передачі корисне навантаження передається за рахунок сил тертя між внутрішньою поверхнею ременя і поверхнею шківа (рис. 1.3, а). Сила тертя розосереджена по всій ширині ременя, що забезпечує рівномірне навантаження всіх його елементів. Ремінь - найбільш тонкий і гнучкий елемент прямокутного перетину. Передача допускає застосування шківів найменших діаметрів. У порівнянні з іншими механічними передачами, плоскоремінна передача забезпечує найбільш спокійний хід без вібрації. Ця перевага робить її у ряді випадків незамінною, особливо в точних верстатах.
Клиноремінная і поліклинова передачі. У цих передачах корисне навантаження передається за рахунок сил тертя між бічними поверхнями паса трапецієдального перетину і канавок шківа (рис. 1.3, б). Через заклинюючу дію клиноремінна передача в порівнянні з плоскоремінною володіє більшою тяговою здатністю. Внаслідок цього при однаковій передаваній потужності вона вимагає меншого натягнення, створює менший тиск на вали і опори, допускає малі кути охопленя на шківах і тому застосовується при великих передавальних числах і менших міжосьових відстанях. Клиноремінна передача краще пристосована для безступінчатого регулювання швидкості, для чого шківи виконують у вигляді розсувних дисків.
До недоліків клиноремінної передачі відноситься менший ККД передачі внаслідок великих втрат на вигин ременя і можливу непостійність розмірів перетину ременя по його довжині. При необхідності застосування в передачі декількох ременів і неминучого розкиду їх розмірів і пружних властивостей з'являються відмінності в передавальних відносинах окремих струмків і в натягові ременів. Це викликає нерівномірне навантаження ременів і знижує їх довговічність.
Ці недоліки усунені в поліклінової передачі, в якій, так само як в клиноремінній передачі, корисне навантаження передається за рахунок сил тертя між бічними поверхнями ребер клиновидної форми і канавок шківа (рис. 1.3, в).
Ремені поліклинової передачі поєднують переваги клинових ременів (підвищене зчеплення з шківами) і гнучкість, характерну для плоских ременів, що дозволяє використовувати поліклинові паси на шківах малого діаметру. Поліклинова передача рекомендується для приводів, що не допускають вібрації. Працює при швидкості до 50 м/с, передавальне число до 12.
Круглоремінна передача. Передача корисного навантаження здійснюється за рахунок сил тертя між внутрішньою поверхнею круглої форми паса і канавки шківа (рис. 1.3, г). Широко використовується в поліграфічних і побутових машинах, у верстатах, годинниковій промисловості і приладах. Застосовують шкіряні, бавовняні, капронові і прогумовані ремені. Ремені випускають діаметром від 2 до 20 мм..
Ремені і шківи
Ремінь є найважливішим елементом передачі, що визначає її працездатність. До ременя пред'являються наступні основні вимоги: висока тягова здатність, тобто надійність зчеплення з шківом, достатня міцність, довговічність і зносостійкість, невисока вартість.
У плоскоремінній передачі застосовують два види ременів: звичайні - з кутовою швидкістю v = 25...30 м/с і швидкохідні - v > 30 м/с.
До звичайних відносяться ремені прогумовані, шкіряні, бавовняні і шерстяні. Випускають їх рулонами. Кінці ременів потрібної довжини зшивають різними методами. Місце зшивання важче і володіє меншою гнучкістю, ніж сам пас. Це викликає удари при проходженні по шківах, вібрацію і різко скорочує термін служби.
Найбільш поширені, прогумовані ремені, нормуються по ГОСТ 23831-79. Вони складаються з декількох шарів тканини на синтетичній основі з гумовими прошарками і обкладинками, завулканізованими в одне ціле. Ширина ременів b = 20...500 мм, товщина б = З...13,5 мм. Ремені випускають трьох типів: А - нарізні, з гумовими прошарками між всіма прокладками і з кромками, захищеними водотривким складом ;
Б - пошарово загорнені як з гумовими прошарками, так і без них;
В - спірально загорнені без гумових прошарків.
Шкіряні ремені (ГССТ 18697-73) відрізняються високою тяговою здатністю і допускають найбільші перевантаження. Унаслідок високої вартості їх застосування обмежене.
Швидкохідні ремені виготовляють з капрону або нейлону з фрикційним покриттям з синтетичних смол або шкіри. Завдяки високій міцності цих матеріалів, ремені являючись набагато тоншими і легшими, допускають значно великі натягнення. Виконують їх нескінченними або кінцевими із зварюванням кінців так, що місце з'єднання не відрізняється від цілого ременя, чим забезпечується найбільш спокійна робота передачі. Швидкохідні ремені допускають швидкість до 100 м/с. Якнайкращі експлуатаційні показники мають нейлонові ремені. Для клиноремінної передачі застосовують прогумовані нескінченні ремені двох конструкцій: з несучим елементом з декількох шарів тканини 1 (рис. 1.4, а) або з шаром шнура 2, навитого по спіралі, завулканізованих у резину 3 (рис. 1.4, б). Ремені можуть мати тканинну обгортку поверхні 4, а також можуть бути 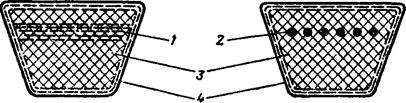 виконані без неї.
виконані без неї.
а) б)
Рис. 1.4 Структура пасів
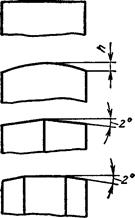
Рис. 1.5 Шківи для плоских ременів
Для плоских ременів форма поверхні шківа гладка циліндрична. Для попередження спаду плоского ременя з шківів один з них (бажано більший) виконують з опуклим ободом, описаним по дузі, або циліндровим з двосторонньою конусністю (рис. 1.5).
Шорсткість робочої поверхні обода повинна бути не більше Ra = 2,5 мкм; у шківів для швидкохідних передач ця поверхня полірується. При швидкості v > 40 м/с із-за повітряного клину, що утворюється між шківом і набігаючою гілкою ременя, знижується зчеплення між взаємодіючими поверхнями і падає несуча здатність передачі. Для попередження цього явища на шківах передбачають кільцеві канавки. При швидкості v≥ 5 м/с шківи необхідно статично балансувати. Шківи швидкохідних передач необхідно піддавати динамічному балансуванню. Основні розміри шківів - діаметр d, ширина В і стріла опуклості h регламентовані ГОСТ 17383-73*.
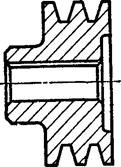
Для клинових ременів (рис. 1.6) робочою поверхнею є бічні сторони клинової канавки в ободі шківа. Робоча поверхня канавок шківа має шорсткість Ra = 2,5 мкм; її бажано полірувати. Шківи повинні бути добре збалансовані. Розміри і число канавок визначаються профілем ременя і числом ременів. Ремінь при вигині на шківі деформується, і кут його перетину зменшується тим більше, чим менше діаметр шківа. Для кращого прилягання бічних поверхонь ременя до канавок шківа кут канавки φ слід вибирати залежно від розрахункового діаметру шківа.
Для поліклинових ременів робочою поверхнею є бічні сторони клинових канавок в ободі шківа. Кут клину канавок шківа φ = 40˚ незалежно від діаметру шківа.
 Для круглих ременів профіль канавок вибирають напівкруглим з радіусом, рівним радіусу ременя.
Для круглих ременів профіль канавок вибирають напівкруглим з радіусом, рівним радіусу ременя.
Рис. 1.6 Шків для клинових ременів
Шківи виконують з чавуну СЧ 15 - при v ≤ 30 м/с, модифікованого чавуну і сталі 25Л - при v ≤ 45 м/с, алюмінієвих сплавів - при v ≤ 80 м/с, з легованої сталі - при v ≤ 100 м/с, зварними з прокату і штампованих елементів - при v ≤ 60 м/с, а також із пластмас і дерева.
ПРУЖИНИ
КУЛАЧКОВІ МЕХАНІЗМИ
Загальні положення
Кулачковим називається механізм, що містить дві основних ланки: кулачок і штовхальник, що утворюють вищу кінематичну пару.
Кулачкові механізми знайшли широке застосування в системах газорозподілу ДВЗ, у системах керування електричних ланцюгів, у вагонах метрополітену (контролери).
Достоїнства кулачкових механізмів:
1.можливість відтворення практично будь-якого закону руху вихідної ланки;
2.мала кількість деталей (кулачок і штовхальник), що дозволяє просто виготовляти й обслуговувати.
Недолік:
Наявність вищої кінематичної пари, у якій можуть виникати підвищені питомі тиски, що може привести до руйнування поверхні кулачка.
1 – кулачок
2 – штовхач
3 – ролик
4 – пружина
5 – контакти
Поверхня кулачка, з яким взаємодіє штовхальник - робочий (дійсний) профіль кулачка.
Поверхня, що проходить через точку В віддалена від дійсного профілю на відстані радіуса ролика - теоретичний профіль (рис. 3.1).
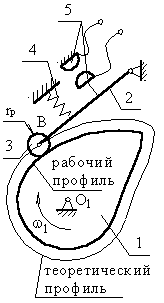
Рис. 3.1 Профіль кулачка
Поняття про кут тиску
Кут тиску - кут між вектором лінійної швидкості вихідної ланки (штовхальника) і реакцією, що діє з ведучої ланки (кулачка) на вихідну ланку. Ця реакція без обліку сил тертя спрямована по загальній нормалі до взаємодіючих поверхонь. Кут тиску визначається експериментально. Для кулачкового механізму з поступально рухаючимся штовхальником припустимий кут тиску дорівнює: [θ] = 25º÷35º.
Для кулачкового механізму з хитним штовхальником припустимий кут тиску дорівнює: [θ] = 35º÷40º.
Реакцію можна розкласти на дві складові:
 і
і  .
.
Якщо, при дії яких-небуть причин, кут тиску буде збільшуватися, то  буде зменшуватися, а
буде зменшуватися, а  – збільшуватися.
– збільшуватися.
При досягненні кутів більше припустимого, можливий перекіс осі штовхальника в направляючій (рис. 3.7).

Рис.3.7 Кут тиску
3.5.1 Виведення формули для кута тиску в кулачковому механізмі.
З трикутника ΔКВР (рис.3.8):
 (1)
(1)
КР = О1Р – О1К = О1 – е
КВ = so + sB
 (2)
(2)
Трикутник ΔО1ВР подібний трикутнику ΔАВС. Тоді
 à
à 
vB1= ω1·O1B
Підставимо це рівняння в (2):
Знак “ – ” – для правої позавісності;
знак “ + ” – для лівої позавісності.
Кут тиску в кулачковому механізмі залежить від розмірів кулачкової шайби: чим вона більше, тим кут тиску менше.
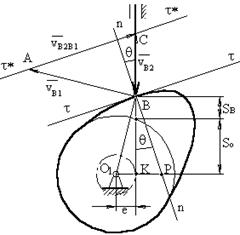
Рис. 3.8 Кут тиску в кулачковому механізмі
3.5.2 Поняття про відрізок кінематичних відношень
Якщо з точки В для якогось поточного положення штовхальника проведемо лінію, рівнобіжну О1Р, а із центра – || nn, то при їхньому перетині одержимо точку D:
BD = O1P = vB2 / vB1 =vqB2
З (рис. 3.9) випливає, що переміщення точки В штовхальника і, знайшовши максимальний відрізок кінематичного відношення, можна визначити положення центра обертання кулачка, відклавши зовнішнім чином від точки D припустимий кут тиску.
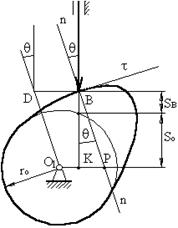
Рис. 3.9 Кінематичні відношення
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
Дата: 2019-07-24, просмотров: 340.