Электрические цепи, предназначенные для выделения колебаний, лежащих в определенном диапазоне частот, называются электрическими фильтрами.
Электрический фильтр представляет собой четырехполюсник, пропускающий без заметного ослабления колебания определенных частот и с большим ослаблением колебания других частот. Полоса частот, в которой затухание фильтра мало, – полоса пропускания (прозрачности). Остальная область частот – полоса задерживания (подавления). Классификация электрических фильтров проводится по различным признакам.
1. Классификация по расположению полосы (полос) пропускания:
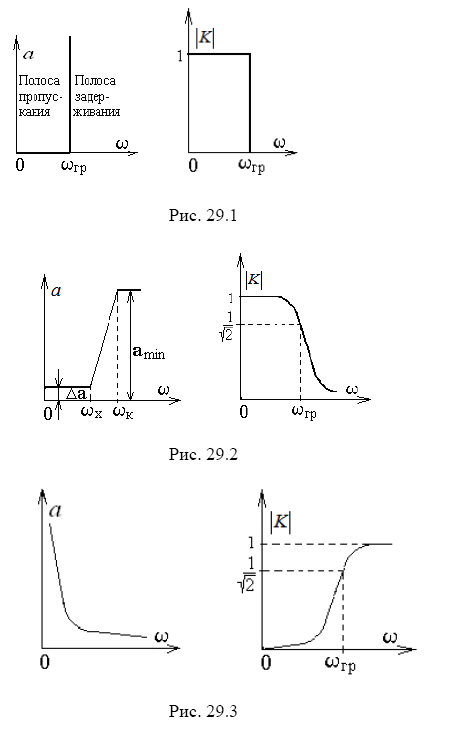
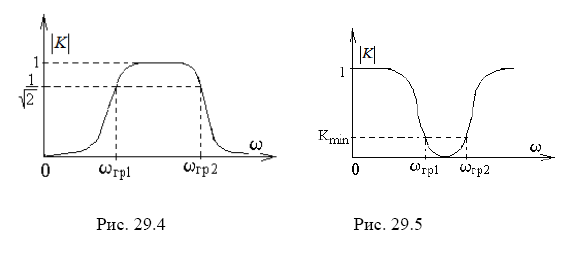
Фильтры нижних частот – полоса пропускания от f=0 до f-граничная. На рис. 29.1 изображены амплитудно-частотные характеристики идеального фильтра нижних частот в координатах a(ω) и K, a(ω) – затухание, K – модуль передаточной функции по напряжению. В реальном фильтре достичь таких характеристик невозможно. Поэтому при проектировании фильтра задается допустимое максимальное затухание в полосе пропускания и необходимое минимальное затухание в полосе задерживания. Между этими полосами находится промежуточная полоса – полоса перехода (рис. 29.2). В эффективной полосе пропускания от ω = 0 до частоты ωX задано допустимое максимальное затухание Δa, в полосе от частоты ωk до бесконечности – необходимое минимальное затухание amin. В полосе перехода от ωX до ωk затухание не задается;
если полоса пропускания находится в пределах от f-граничная до бесконечности, то такие фильтры называются фильтрами верхних частот (рис. 29.3);
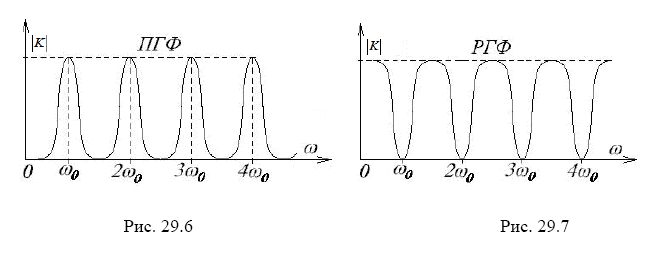
полосовые фильтры (рис. 29.4) имеют две частоты, ограничивающие полосу пропускания: 
заграждающий, или режекторный, фильтр (ЗФ, РФ) имеет вместо полосы пропускания полосу режекции с граничными частотами 0 < ωгр1 < ωгр2 < ∞, которые определяются на заданном минимальном уровне Kmin (рис. 29.5);
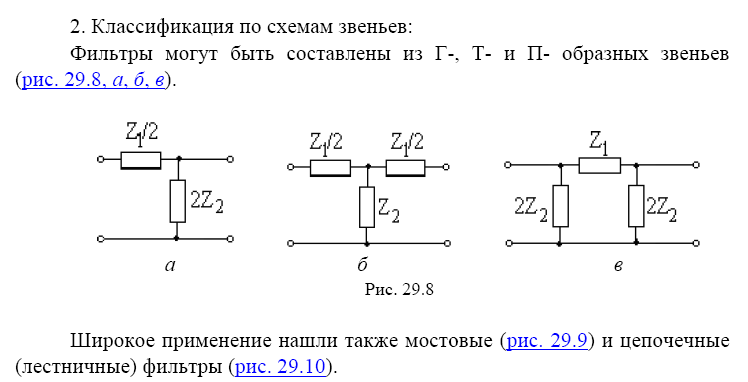
при приёме радиолокационных и других импульсных сигналов используются фильтры, имеющие ряд одинаковых полос пропускания – полосовые гребенчатые фильтры (ПГФ) с кратными средними частотами полос пропускания (рис. 29.6);
гребенчатые фильтры, имеющие дискретный ряд полос режекции, называются заграждающими или режекторными гребенчатыми фильтрами (ЗГФ, РГФ), рис. 29.7.
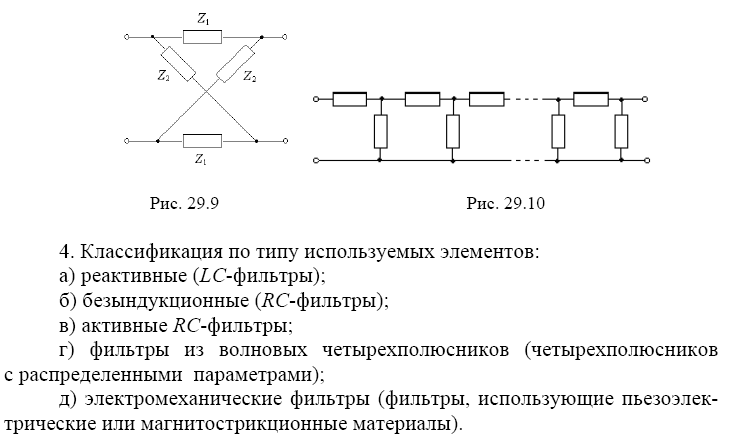
3. Классификация по типу используемых элементов:
реактивные (LC-фильтры)
безындуктивные (RC-фильтры)
активные RC-фильтры
фильтры из волновых четырехполюсников (четырехполюсников с распределенными параметрами)
электромеханические фильтры (фильтры, использующие пьезоэлектрические или магнитострикициооные материалы)
4. Классификация фильтров по типам характеристик:
1. фильтры типа k (простейшие Г-, Т-, П-образные фильтры)
2. фильтры типа m (производные фильтры более высокого порядка)
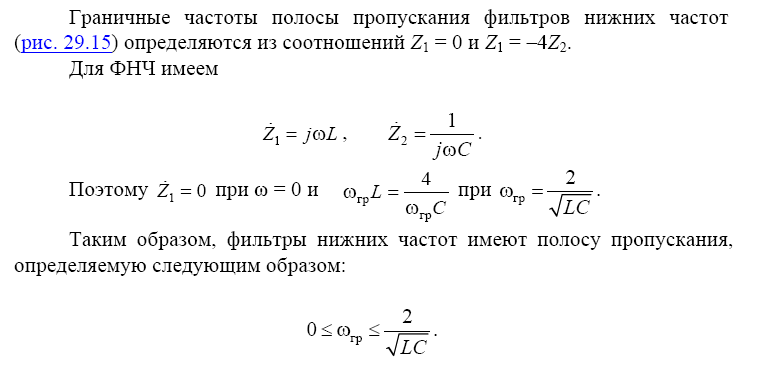
Физическое действие фильтров объясняется тем, что на низких частотах сопротивления индуктивностей малы, а сопротивления емкостей велики; на высоких же частотах наоборот: сопротивления индуктивностей велики, а емкостей – малы.
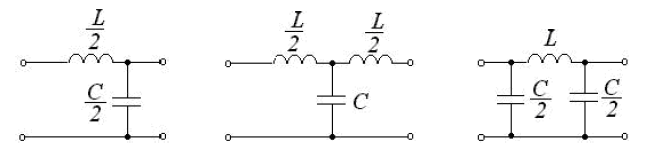
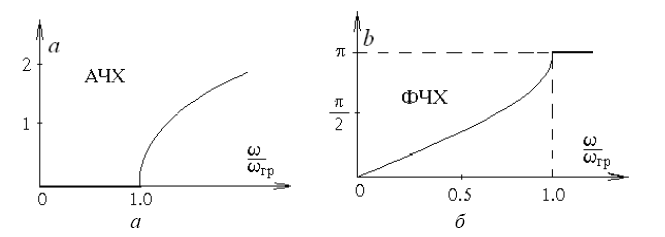
Варианты реализации ФНЧ и их АЧХ и ФЧХ представлены на рисунках ниже:
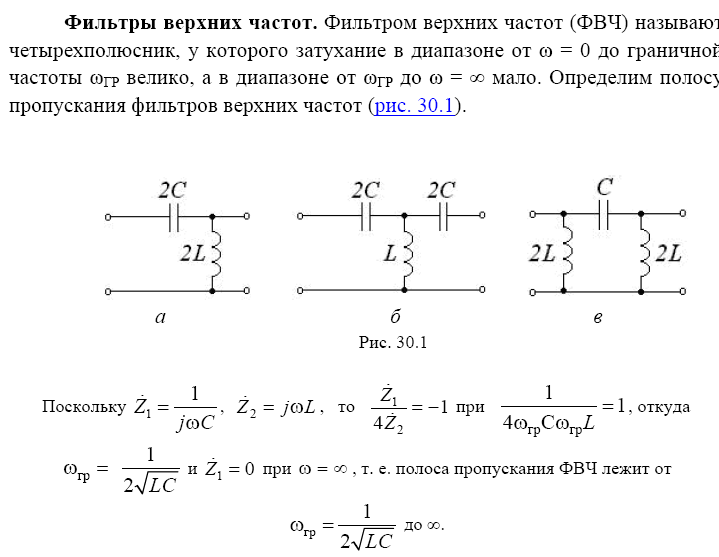
Фильтры верхних частот. Фильтром верхних частот называют четырехполюсник, у которого затухание в диапазоне от ω=0 до граничной частоты ωгр велико, а в диапазоне от ωгр до ω=∞ мало. Определим полосу пропускания фильтров верхних частот.
Графики АЧХ и ФЧХ для ФВЧ представлены ниже:

Полосовые фильтры. Для повышения избирательности вместо колебательных контуров используются полосовые фильтры, представляющие собой два связанных контура, сопротивление связи между которыми резко изменяется с частотой, что приводит к значительному улучшению частотных характеристик. Полосовые фильтры (рис. 30.8) имеют в продольной ветви резонанс напряжений на частоте ω0, а в поперечной – резонанс токов; причем резонансные частоты последовательного и параллельного контуров одинаковы.
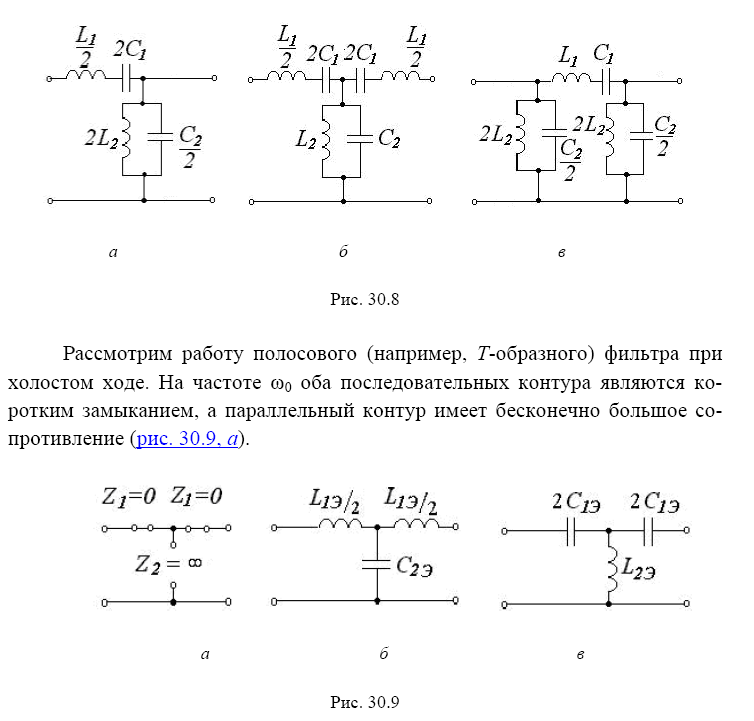
Рассмотрим работу полосового (например, Т-образного) фильтра при холостом ходе. На частоте ω0 оба последовательных контура являются коротким замыканием, а параллельный контур имеет бесконечно большое сопротивление (рис. 30.9, а).
Напряжение на выходе фильтра равно входному напряжению, т. е. a = 0 (|КХХ| = 1). На частотах ω > ω0 последовательные контуры имеют индуктивное сопротивление, а параллельный – емкостное сопротивление (рис. 30.9, б). Следовательно, эквивалентная схема полосового фильтра представляет собой фильтр нижних частот, имеющий полосу пропускания от ω = 0 до некоторой граничной частоты ω = ωB. На частотах ниже резонансной частоты ω < ω0 последовательные контуры имеют емкостное сопротивление, а параллельный – индуктивное сопротивление. Из эквивалентной схемы (рис. 30.9, в) видно, что она является фильтром верхних частот, в полосе пропускания которого от ωH до ω = ∞, а = 0.
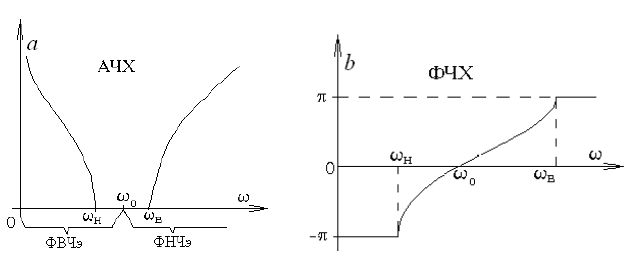
Графики АЧХ и ФЧХ для полосовых фильтров:
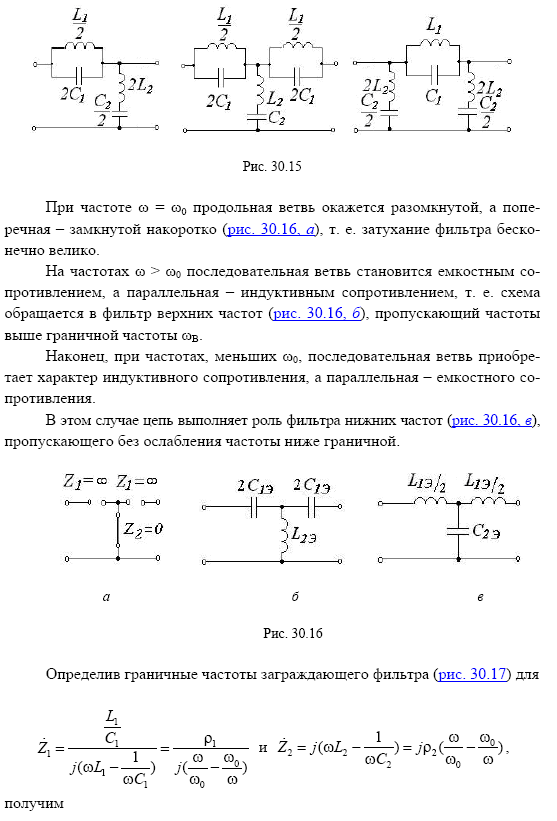
Заграждающие фильтры. Заграждающие фильтры (рис. 30.15) можно получить, поменяв в полосовых фильтрах местами последовательный и параллельный контуры.
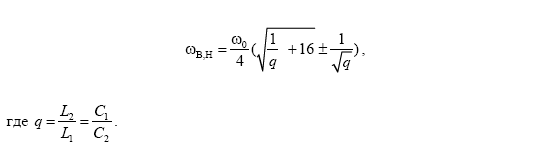
При частоте ω = ω0 продольная ветвь окажется разомкнутой, а поперечная – замкнутой накоротко (рис. 30.16, а), т. е. затухание фильтра бесконечно велико.
На частотах ω > ω0 последовательная ветвь становится емкостным сопротивлением, а параллельная – индуктивным сопротивлением, т. е. схема обращается в фильтр верхних частот (рис. 30.16, б), пропускающий частоты выше граничной частоты ωB.
Наконец, при частотах, меньших ω0, последовательная ветвь приобретает характер индуктивного сопротивления, а параллельная – емкостного сопротивления.
В этом случае цепь выполняет роль фильтра нижних частот (рис. 30.16, в), пропускающего без ослабления частоты ниже граничной.
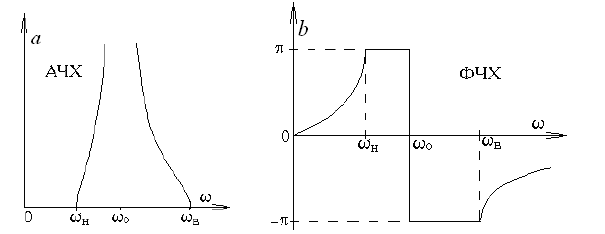
Графики АЧХ и ФЧХ для заграждающего фильтра:
Электроника
Дата: 2019-07-23, просмотров: 827.