Типы шаговых двигателей
Шаговые двигатели на постоянном магните.
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рис. 1). Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток как следствие больший момент, чем у двигателей с переменным магнитным сопротивлением.
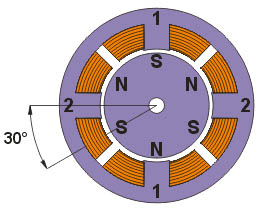
Рис. 1.2 Двигатель с постоянными магнитами.
Показанный на (рис.1) двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Такой двигатель, как и двигатель с переменным магнитным сопротивлением, имеет величину шага 30 град. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48 – 24 шага на оборот (угол шага 7.5 – 15 град).
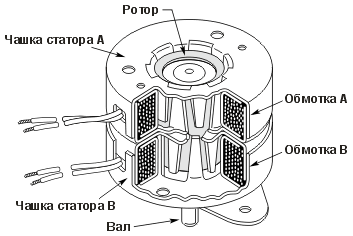
Рис. 1.3 Разрез шагового двигателя с постоянными магнитами.
Для удешевления конструкции двигателя магнитопровод статора выполнен в виде штампованного стакана. Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, которые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, котрая ограничивает максимальную скорость. Для работы на высоких скоростях используются двигатели с переменным магнитным сопротивлением.
Режимы работы шаговых двигателей
Полношаговый – полный шаг реализуется поочередной подачей управляющих напряжений по фазам. Стандартное число – 200 перемещений на 1 оборот.
Режим половинного шага – в режиме половинного шага после активации одной фазы, остается состояние неизменным часть времени включения следующей. На зуб ротора действуют сразу два полюса. Вал замирает, фиксируя промежуточное положение. Затем первая фаза пропадает, ротор делает полшага вперед. Несмотря на меньший развиваемый крутящий момент, режим находит большее применение промышленностью, благодаря сокращению уровня вибраций.
Микрошаговые режимы являются редкими наработками конкретных производителей. Данным режимом управляет специальный чип, генерирующий управляющие напряжения, чтобы точность позиционирования вала находилась в районе сотой шага (20000 перемещений на 1 оборот). Высокая точность нужна микроэлектронике, но не исключено возникновение потребности тонких технических решениях среди промышленных конвейеров.
ДРАЙВЕРЫ ШАГОВЫХ ДВИГАТЕЛЕЙ
Драйверы с ШИМ.
На текущий момент ШИМ–драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ–сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP–переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода.
Однако, ШИМ–драйверы также весьма сильно отличаются друг от друга. Лучше, если частота драйвера будет более 20 кГц, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей, как и сами двигатели делятся на униполярные и биполярные.
2.3. Выбор ШИМ–драйвера биполярного шагового двигателя.
Первый параметр, на который стоит обратить внимание – это сила тока, которую может обеспечить драйвер. Максимальная сила тока драйвера должна была на 15–40% больше.
Это даст запас на случай, если понадобится получить больший момент от мотора, или в будущем поставите более мощный двигатель. Так же – не будет излишним иметь в наличии радиоэлектронные компоненты к тому или иному виду (размеру) двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, вызывать излишние вибрации.
Второй параметр – это напряжение питания. Весьма важный и неоднозначный параметр. Напряжение питания влияет на момент на высоких оборотах, вибрации, нагрев двигателя и драйвера. Как правило, максимальное напряжение питания драйвера примерно равно максимальному току  , умноженному на 8–10.
, умноженному на 8–10.
Третий параметр – наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, опторазвязка стоит обязательно, ведь драйвер – устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ–контроллера.
.
Четвертый параметр – наличие механизмов подавления резонанса. Резонанс шагового двигателя – явление, которое проявляется всегда, разница только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала.
Основной причиной появления колебаний является прерывистое вращение ротора. При осуществлении шага ротору толчком сообщается некоторая энергия. Этот толчок возбуждает колебания. Энергия, которая сообщается ротору в полушаговом режиме, составляет около 30% от энергии полного шага. Поэтому в полушаговом режиме амплитуда колебаний существенно меньше. В микрошаговом режиме с шагом 1/32 основного при каждом микрошаге сообщается всего около 0.1% от энергии полного шага. Поэтому в микрошаговом режиме явление резонанса практически незаметно
Для подавления резонанса используется микрошаг и – встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. Механизм подавления резонанса встроен во все драйверы PURELOGIC RND.
Пятый параметр – протокольная часть. Надо убедиться, что драйвер работает по нужному вам протоколу, а уровни входных сигналов совместимы с требуемыми логическими уровнями. Эта проверка идет пятым пунктом, потому что за редким исключением подавляющее число драйверов работает по протоколу STEP/DIR/ENABLE и совместимо с уровнем сигналов 0..5  , вам надо только лишь убедиться.
, вам надо только лишь убедиться.
Шестой параметр – наличие защитных функций. Среди них защита от превышения питающего напряжения, тока обмоток (в т.ч. от короткого замыкания обмоток), от неверного подключения полюсов питающего напряжения, от неправильного подключения фаз шагового мотора.
Седьмой параметр – наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако, из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости.
Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов – так, для драйвера со входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена
 об/мин, (2.2)
об/мин, (2.2)
что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц.
Восьмой параметр – наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» – внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т.п. Все они не являются необходимыми, но могут сильно облегчить построение станка.
Основные характеристики
Разные модели бормашин могут значительно различаться по мощности. Так, у известного производителя бормашин Proxxon в линейке инструментов разброс мощностей составляет от 6 до 100 Вт. Ещё одна важная характеристика бормашин — частоты вращения вала. Именно это и определяет их многофункциональность. Правильный выбор частоты вращения вала позволяет выполнять разные технологические операции с различными по свойствам материалами. Так, например, полировка и тонкая шлифовка пластика должны осуществляться на малых оборотах, а отрезные и зачистные операции — на больших. Сверление стекла — на больших оборотах, а древесины — на малых. Шлифование стальных деталей выполняют на средних скоростях. Частота вращения измеряется в оборотах в минуту. Как правило, диапазон скорости вращения вала бормашин на холостом ходу — от 5 000 до 35 000 об./мин.
4.2 Виды насадок для бормашиок
Для выполнения различных работ в бормашинах используются насадки разного назначения. Как правило, набор самых необходимых насадок входит в комплект универсальной бормашины. Сменные насадки закрепляются на инструменте при помощи кулачкового быстрозажимного мини-патрона (он позволяет быстро менять насадки с хвостовиком диаметром от 0,5 до 3,2 мм) либо в патроне со сменными цангами под разные хвостовики. При работе с цанговым патроном тратится больше времени на замену насадок, но профессионалы предпочитают именно его, потому что хвостовик насадки центрируется в цанге точнее, чем в кулачках. Поэтому цанговые патроны лучше приспособлены для точных операций. Кроме того, они компактнее и надёжнее. Для работы лучше иметь патроны обоих типов.

Рис.4.1 Виды насадок на бормашинку
Для выполнения различных работ в бормашине используются насадки разного назначения например:
1. Набор сменных цанг и кулачковый патрон.
2. Шлифовальные камни различной формы и размеров из абразивных материалов. Применяются для обработки металла, пластика и керамики.
3. Шлифовальные круги (диаметром 22 мм и толщиной 3 мм) из корунда и карбида кремния.
4. Алмазные боры («линза» диаметром 5 мм и шаровидные диаметром 1,8 и 1 мм) незаменимы при гравировальных работах.
5. Мелкозубый отрезной диск диаметром 22 мм из пружинной стали. Удобен при раскрое деталей из пластика и древесины.
6. Алмазные диски диаметром 20 мм используют при резке стекла и керамики.
7. Корундовые отрезные диски диаметром 22 мм и толщиной 1,8 мм хорошо режут металл.
8. Латунными щётками диаметром 22 мм можно удалить налёт с поверхности детали или ржавчину, почистить детали. Применяют их и для матирования и тонкого шлифования.
9. Для полировки поверхностей деталей из пластика, металла и даже стекла выпускаются круги из войлока, фетра, кожи и хлопка. Понадобится для этих работ и полировальная паста.
10. Твердосплавные фрезы цилиндрической и шаровидной формы.
11. Свёрла (по металлу, пластику и древу) диаметром от 1 до 3,2 мм.
12. Алмазные свёрла (для стекла) диаметром 1.0, 1.2 и 1.4 мм.
13. Сменные шлифовальные цилиндры разной зернистости пригодны для широкого спектра операций.
Цена шага в общем случае.
Одним из основных показателей шагового двигателя является величина или цена шага в градусах или радианах, которая в общем случае равна:
 , (5.1)
, (5.1)
где  – шаг двигателя;
– шаг двигателя;
 – число пар полюсов;
– число пар полюсов;
 – число обмоток управления, пространственно смещенных одна относительно другой.
– число обмоток управления, пространственно смещенных одна относительно другой.
Если число полюсов статора и ротора различно, то в формулу (5.1) следует подставлять большее из двух чисел. Обычно обмотки управления размещаются на статоре (чтобы избежать скользящих контактов), а большее число полюсов выполняется на роторе. Конструкции шагового двигателя с обмотками управления на роторе будем называть обращенными.  дальнейших рассуждениях для определенности будем оперировать с числом обмоток управления (или фаз) статора и с числом полюсов ротора.
дальнейших рассуждениях для определенности будем оперировать с числом обмоток управления (или фаз) статора и с числом полюсов ротора.
Из формулы (5.1) видно, что уменьшение цены шага может быть достигнуто увеличением числа полюсов и числа обмоток управления шагового двигателя.
Двигатели с активным ротором (с обмоткой возбуждения или постоянными магнитами па роторе) по технологическим соображениям не могут быть выполнены с большим числом полюсов и, следовательно, при ограниченном числе обмоток управления не позволяют получить малого шага двигателя [4].
Магнитная энергия.
Магнитная энергия (энергия магнитного поля) является периодической функцией электрического угла рассогласования ротора.
 (5.4)
(5.4)
Магнитная энергия может возникать (уменьшаться и увеличиваться, ослабляться или усиливаться) при прохождении через проводник переменного электрического тока, либо при изменении магнитного поля, электрическим токам в виде некоторых потоков заряженных частиц (электронов) или магнитными моментами заряженных частиц.
Угол рассогласования.
Угол рассогласования, выраженный в электрических радианах, связан с геометрическим углом рассогласования известным соотношением. Он определяет точность работы шагового двигателя и равен отклонению передачи углового перемещения.
 (5.5)
(5.5)
В следящей системе отклонение угла рассогласования проводит к изменению управляющего напряжения. Угол рассогласования может быть положительным или отрицательным. При отрицательном угле рассогласования подается прямое управляющее напряжение, а при положительном – обратное. Для избежания превышения управляющего напряжения угол ограничивается. При превышении данного порога система переходит в режим ошибки, что свидетельствует о неисправности обратной связи системы.
Зубцовый эффект.
Увеличение числа полюсов в разумных пределах с учетом особенностей геометрии и степени насыщения магнитной цепи позволяет увеличить в заданных габаритах как удельный, так и максимальный синхронизирующий моменты при соответственном уменьшении средней скорости вращения ротора, т. е. при неизменной полезной мощности шагового двигателя. Это явление в ряде случаев неправильно трактовалось как « зубцовый эффект », позволяющий, якобы, существенно повысить полезную мощность электрической машины.
 (5.7)
(5.7)
Получение расчетных выражений статического момента различных шаговых двигателей в каждом случае имеет свои особенности и является сложной задачей, так как необходимо вычислить интегральную величину для нелинейной системы.
Статическая устойчивость.
Статическая устойчивость шагового двигателя с симметричным активным ротором симметрична относительно точки устойчивого равновесия О и равна отрезку АВ (рис. 5.1),
 (5.13)
(5.13)
Статическая устойчивость шагового двигателя с симметричным реактивным ротором также симметрична относительно точки устойчивого равновесия О и равна отрезку АВ (рис. 5.2), но уже вдвое меньше.
 (5.14)
(5.14)
Статическая устойчивость реактивных шаговых двигателях с несимметричной магнитной системой несимметрична относительно точки устойчивого равновесия; отрезки АО и 0В на рис. 5.2, 5.3 не равны:
 , (5.15)
, (5.15)
где  .
.
Понятие статической устойчивости для шагового двигателя совпадает с определением устойчивости синхронных машин.
Динамическая устойчивость.
Динамическая устойчивость – окрестность точки устойчивого равновесия исходной характеристики крутящего момента, из которой ротор после снятия вынуждающего воздействия попадает в точку устойчивого равновесия О новой характеристики, смещенной на шаг, не проходя точек неустойчивого равновесия смещенной характеристики А и В.
Динамическая устойчивость всегда несимметрична относительно исходной точки устойчивого равновесия. Ее отрицательная часть, отсчитываемая в сторону, обратную смещению характеристики и движению ротора, равна отрицательной части зоны статической устойчивости, уменьшенной на величину шага, а положительная часть, отсчитываемая в сторону движения ротора, равна положительной части зоны статической устойчивости, увеличенной на величину шага. Как видим из рис. 5.1, отрицательная часть зоны динамической устойчивости равна отрезку АО, а положительная часть – отрезку ОВ.
Динамическая устойчивость шагового двигателя с симметричным активным ротором:
 (5.16)
(5.16)
Динамическая устойчивость шагового двигателя с симметричным реактивным ротором:
 (5.17)
(5.17)
Динамическая устойчивость шагового двигателя с несимметричным реактивным ротором:
 (5.18)
(5.18)
Запас устойчивости.
Приведенные выражения показывают, что в направлении вращения ротора шагового двигателя с любым числом обмоток управления имеет запас устойчивости, превышающий величину шага, тогда как в обратном направлении зона динамической устойчивости шагового двигателя с реактивным ротором может быть меньше шага. Действительно, отрицательная часть зоны динамической устойчивости реактивного шагового двигателя с тремя обмотками управления м=3 равна половине шага.
 (5.19)
(5.19)
Это означает, что если управляющий импульс переключает обмотки управления в момент, когда ротор в процессе свободных колебаний около исходной точки устойчивого равновесия 0 (рис. 5.2) отклонился в сторону, обратную направлению вращения, больше, чем на полшага, т. е. за точку А, то ротор оказывается вне зоны динамической устойчивости по отношению к новой характеристике, смещенной на шаг вперед. Ротор переместится в направлении ближайшей точки устойчивого равновесия, т. е. назад. Происходит опрокидывание или сбой шагового двигателя. При поступлении следующих тактовых импульсов может наступить режим хаотических движений ротора [13].
Сбои в работе двигателя.
Наиболее опасные сбои в работе двигателя имеют место при холостом ходе, когда амплитуда свободных колебаний ротора максимальна и равна начальному отклонению ротора от положения устойчивого равновесия. В этом нетрудно убедиться, рассмотрев идеальный холостой ход шагового двигателя, считая систему консервативной, с чисто инерционной нагрузкой, и ограничиться учетом только первой пространственной гармоники синхронизирующего момента 
 . Движение ротора, в предположении, что ток в обмотках управления мгновенно достигает установившегося значения, будет описываться уравнением:
. Движение ротора, в предположении, что ток в обмотках управления мгновенно достигает установившегося значения, будет описываться уравнением:
 (5.20)
(5.20)
После приведения к электрическим углам получим уравнение незатухающих колебаний математического маятника:
 , (5.21)
, (5.21)
где  – число пар полюсов ШД;
– число пар полюсов ШД;
 – максимальный синхронизирующий момент;
– максимальный синхронизирующий момент;
 – момент инерции ротора.
– момент инерции ротора.
Сбои в работе двигателя при отработке первого шага из состояния покоя уравнение следует решать при начальных условиях:
 (5.22)
(5.22)
Так как при подаче первого управляющего импульса ротор оказывается смещенным на шаг «назад» по отношению к новой точке устойчивого равновесия. Подобно маятнику ротор будет совершать колебания около новой точки устойчивого равновесия с амплитудой, равной шагу. При подаче следующего управляющего импульса ротор может оказаться отклоненным на шаг «назад».
Диапазон рабочих частот.
С устойчивостью тесно связано понятие о частоте приемистости и о диапазоне рабочих частот шагового двигателя, под которой понимается максимальная частота следования управляющих импульсов, при которой ротор шагового двигателя втягивается в синхронизм с места без потери шага.
Частота приемистости тем больше, чем выше динамическая добротность шагового двигателя и чем меньше цена шага. Диапазон рабочих частот при одной и той же динамической добротности и цене шага частота приемистости растет с увеличением зоны динамической устойчивости, т. е. с увеличением числа обмоток управления. Это обстоятельство связано с тем, что при пуске, как показали теоретические и экспериментальные исследования, ротор за первые тактовые импульсы может отрабатывать не полные шаги, а идти с некоторым запаздыванием по отношению к оси результирующей н. с., оставаясь в пределах диапазона рабочих частот при каждом очередном переключении обмоток управления шагового двигателя. Очевидно, что запаздывание ротора может быть тем большим, чем шире диапазон рабочих частот.
Следует, однако, иметь в виду, что увеличение частоты приемистости за счет выбора большего числа обмоток управления неизбежно связано с увеличением динамической и статической ошибок шагового двигателя [13].
Уравнение движения ротора.
Поведение шагового двигателя в динамике описывается уравнением движения ротора:
 , (5.25)
, (5.25)
где  – момент инерции системы, приведенный к валу ШД;
– момент инерции системы, приведенный к валу ШД;
 – момент сопротивления нагрузки;
– момент сопротивления нагрузки;
 – мгновенный синхронизирующий момент ШД.
– мгновенный синхронизирующий момент ШД.
Мгновенное значение синхронизирующего момента зависит от положения ротора не мгновенного значения тока во включенной обмотке управления. Его можно определить, подставив в выражения (5.8)–(5.10) вместо установившегося тока его мгновенное значение, которое в свою очередь может быть найдено из уравнения равновесия э. д. с. в цепи обмотки управления.
Динамический момент.
Динамический момент может быть представлен в виде суммы синхронизирующего статического момента и отрицательной составляющей, пропорциональной угловой скорости ротора:
 , (5.31)
, (5.31)
где  .
.
Движение ротора.
Подставляя (5.29) в (5.25), найдем, что уравнение движения ротора описывается нелинейным дифференциальным уравнением второго порядка без правой части:
 (5.32)
(5.32)
Коэффициент демпфирования.
Половина коэффициента при первой производной угла по времени определяет показатель затухания при решении этого уравнения линейным приближением, т. е. коэффициент демпфирования, зависящий от положения ротора и равный:
 (5.33)
(5.33)
В шаговых двигателях с реактивным ротором э. д. с. самоиндукции велика, а э. д. с. вращения, особенно в насыщенных машинах, мала. Эти двигатели практически не имеют внутреннего коэффициента демпфирования.
Наоборот, в шаговых двигателях с активным ротором э. д. с. вращения значительна, а э. д. с. самоиндукции, особенно в машинах с постоянными магнитами или печатными обмотками на роторе, исчезающе мала. Эти двигатели обладают внутренним коэффициентом демпфирования.
Шаговый двигатель с постоянными магнитами на роторе могут быть спроектированы с достаточно большим внутренним коэффициентом демпфирования. Даже при холостом ходе в этом случае процесс отработки шага близок к апериодическому.
Реактивным шаговым двигателям с одинаковым числом полюсов статора и ротора, у которых угловые скорости ротора и оси результирующей н. с. разны, при одностаторном исполнении двигателя, т. е. при воздействии всех обмоток управления на общий ротор, внутренний электромагнитный коэффициент демпфирования может быть обеспечен с помощью короткозамкнутой демпферной клетки, охватывающей полюсы ротора. В редукторных шаговых двигателях, где ротор вращается в целое число раз медленнее поля, использование коэффициента демпфирования и демпферной клетки на роторе приводит только к увеличению электромагнитных постоянных времени обмоток управления и к ухудшению работы двигателя [13].
СПЕЦЧАСТЬ
Сборка и наладка ЧПУ станка
Согласно заданию на бакалаврскую работу был собран прототип ЧПУ станка.
Электроника ЧПУ станка.
Для управления станком используется плата Arduino UNO, которая в свою очередь подключается к ПК.
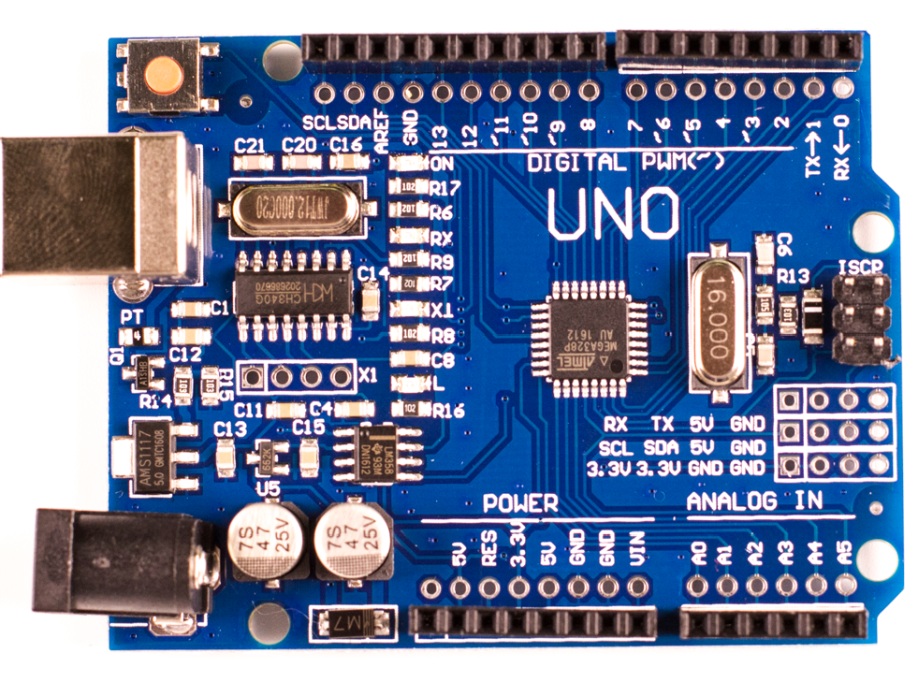
Рис. 6.6. Плата Arduino UNO.
Существует множество разновидностей Arduino, которые отличаются размером и количеством выводов. Arduino представляет собой инструмент, с помощью которого можно создавать различные электронные устройства. По сути, это аппаратная вычислительная платформа универсального предназначения. Она может использоваться как для построения простых схем, так и для реализации сложных проектов.
Для данной платформы существует огромное множество различных плат расширения, которые упрощают сборку электронных устройств, а так же расширяют возможности Arduino.
При сборке ЧПУ станка рекомендуется использовать плату расширения
CNC shield v3. Она предназначена для подключения драйверов и шаговых двигателей к Arduino.
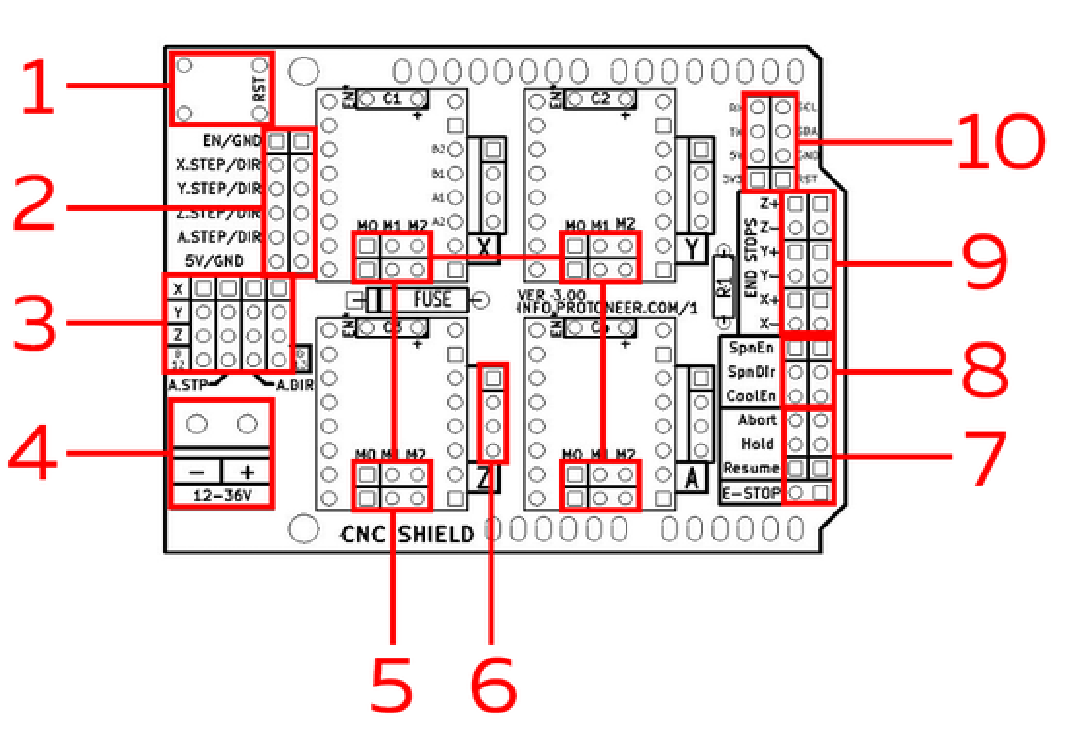
Рис. 6.7. CNC shield v3.
1 – Кнопка сброса.
2 – Колодки контактов для подключения внешних драйверов двигателей.
3 – Ось A может дублировать одну из осей X, Y, Z с помощью дополнительного двигателя и драйвера или работать автономно (например ось A может быть использована для двигателя экструдера, в случае 3D-принтера). Эти колодки контактов служат для настройки оси A. Для дублирования осей нужно установить перемычки на эти колодки.
4 – Разъем питания. На плату необходимо подавать питание 12 – 36 В.
5 – Возле каждого слота для подключения драйвера двигателей имеется колодка управления микрошагом двигателя. В зависимости от выставленных перемычек вы можете добиться вплоть до 1/32 шага на драйверах DRV8825 и 1/16 шага на драйверах A4988.
6 – Колодки для подключения биполярного шагового двигателя (на 4 провода).
7 – Колодка для подключения внешних кнопок управления:
· Отмена;
· Пауза;
· Продолжить;
· Стоп.
8 – Колодка для подключения контактов:
· Включения шпинделя (SpnEn);
· Направления шпинделя (SpnDir);
· Включения подачи охлаждения (CoolEn);
9 – Колодка контактов для подключения 3 концевых выключателей.
10 – Колодка контактов для интерфейсов UART и I2C:
· Контакты UART: RX, TX, 5V, 3V3;
· Контакты I2C: SCL, SDA, GND, RST.
Характеристики драйверов А4988:
· напряжения питания: от 8 до 35  ;
;
· возможность установки шага: от 1 до 1/16 от максимального шага;
· напряжение логики: 3-5.5  ;
;
· защита от перегрева;
· максимальный ток на фазу: 1  без радиатора, 2
без радиатора, 2  с радиатором;
с радиатором;
· расстояние между рядами ножек: 12 мм;
· размер платы: 20 х 15 мм;
· габариты драйвера: 20 х 15 х 10 мм;
· габариты радиатора: 9 х 5 х 9 мм;
· вес с радиатором: 3 г;
· вес без радиатора: 2 г.
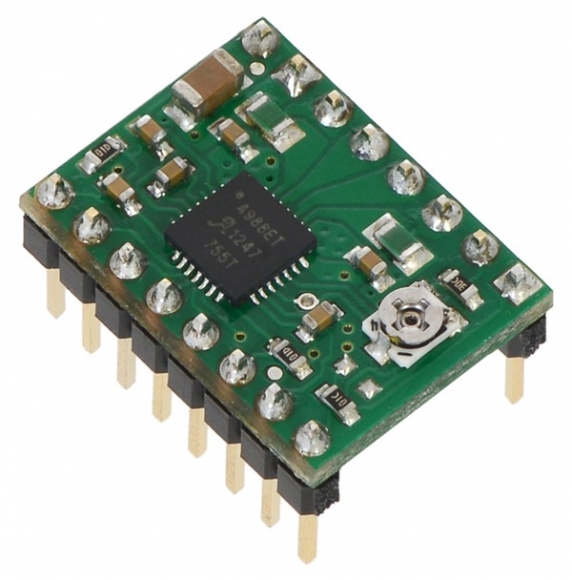
Рис. 6.8. Драйвер шагового двигателя A4988.
Особенностями A4988 являются регулируемый ток, защита от перегрузки и перегрева, драйвер также имеет пять вариантов микрошага (вплоть до 1/16-шага). Он работает от напряжения 8 - 35 В и может обеспечить ток до 1 А на фазу без радиатора и дополнительного охлаждения (дополнительное охлаждение необходимо при подаче тока в 2 A на каждую обмотку).
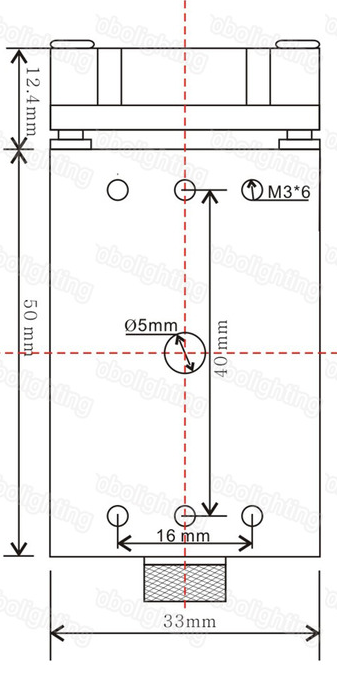
Рис. 6.9. Лазерный модуль.
Корпус лазерного модуля представляет собой радиатор. На него установлен кулер для охлаждения лазерного диода, а так же фокусировочная линза.
Наладка ЧПУ станка.
После сборки следует приступить к наладке станка. Для этого необходимо прошить плату Arduino. Для этого существует среда для программирования Arduino IDE. В данном случае была установлена прошивка GRBL 1.1.f.
После установки необходимо внести параметры станка в память микропроцессора. Параметры можно просмотреть командой $$ в любой программе, работающей с прошивкой GRBL 1.1f.
При первоначальной настройке важными параметрами являются:
$32 - Режим лазера, логический. При значении 1 параметр включен. Это позволяет управлять лазером с помощью ШИМ.
$100, $101, $102 – [X,Y,Z] шагов/мм. Для настройки этого значения необходимо знать размер шестерней ременной передачи, колличество полных шагов на оборот двигателей, колличество микрошагов на один шаг.
Значение расчитывается по формуле:
 , (6.1)
, (6.1)
где,  – количество шагов на 1 оборот умножается на микрошаг (дробление шага);
– количество шагов на 1 оборот умножается на микрошаг (дробление шага);  – шаг зубца ремня умножается на количество зубцов шестерни.
– шаг зубца ремня умножается на количество зубцов шестерни.
$110, $111 и $112 – [X,Y,Z] Максимальная скорость, мм/мин. Оптимальная максимальная скорость для каждого станка своя, находится экспериментальным путем.
$120, $121, $122 – [X,Y,Z] Ускорение, мм/сек2. Ускорение, как и скорость подбирается экспериментальным путем.
После настройки перечисленных параметров можно начать работу со станком, но прошивка GRBL 1.1.f имеет множество дополнительных настроек, таких как: установка концевых выключателей, настройка функции поиска нулевой точки, программное ограничение рабочего поля станка и т.д.
ЭКОНОМИЧЕСКАЯ ЧАСТЬ
В данном разделе найдена экономическая эффективность производства лазерно-гравировального ЧПУ станка, сравнение себестоимости собранного прототипа с рыночным готовым аналогом.
Табл. 7.1
| Наименование материала | Кол-во | Стоимость, руб. |
| Лист фанеры,10мм | 1 шт. | 650 |
| Двигатель NEMA17 HS4401 | 2 шт. | 1066 |
| Arduino UNO | 1 шт. | 215 |
| CNC shield v3 | 1 шт. | 105 |
| Драйвер А4988 | 2 шт. | 200 |
| Саморез | 100 шт. | 30 |
| Уголок металлический | 9 шт. | 135 |
| Кабель акустический KAB0392 медь (2*1,20мм2) | 4 м. | 88 |
| Блок питания компьютерный 300Вт | 1 шт. | 400 |
| Лазерный модуль 1000 мВт | 1 шт. | 2600 |
| Болт М5 | 4 шт. | 8 |
| Гайка М5 | 8 шт. | 8 |
| Шариковая направляющая | 4 шт. | 300 |
| Кулер 8мм | 2 шт. | 200 |
| Шкив GT2 20Т 5х6 | 2 шт. | 100 |
| Шестерня подачи ремня GT2 | 2 шт. | 140 |
| Ремень GT2, 6мм | 3 м | 180 |
| Итого | 6425 |
Исходя из таблицы, себестоимость прототипа составляет 6425 рублей. Стоимость заводского ЧПУ станка с рабочим полем такого же размера составляет 15000 рублей и больше. Итого экономическая эффективность велика, не смотря на недостатки сборки, которые не отображаются на качестве работы.
Предназначением данного ЧПУ станка является изготовление сувенирной продукции из дерева, пластика, акрила. Окупаемость напрямую зависит от рекламы готовой продукции, а так же возможности изготавливать товар на заказ. Станок окупает себя за несколько месяцев работы.
Таблица 7.2
| Наименование контроллера | Преимущества | Недостатки | Стоимость, руб. |
| Arduino UNO+CNC shield | Простой язык программирования, низкая стоимость, удобство в эксплуатации. | Высокая чувствительность к высокочастотным помехам, необходимость знания языка программирования при настройке. | 320 |
| Mach3 | Высокая точность, не требует программирования, имеет дополнительные защитные функции. | Высокая стоимость. | 3000 |
В таблице 7.2 произведено сравнение специализированого контроллера для ЧПУ станка Mach3 и Arduino UNO с платой расширения CNC shield. Несмотря на свои недостатки Arduino UNO является отличным контроллером для ЧПУ станка, а учитывая разницу в стоимости, выбор очевиден.
Таблица 7.3
| Наименование драйвера ШД | Характеристики | Стоимость, руб. |
| A4988 | Максимальный ток 2А, напряжение питания 8-35В,максимальное деление шага:1/16. | 100 |
| DRV8825 | Максимальный ток 2,2А, напряжение питания 8-45В,максимальное деление шага:1/32. | 115 |
| L298N | Максимальный ток 2А, напряжение питания 8-35В,максимальное деление шага: нет. | 215 |
В таблице 7.3 произведено сравнение стоимости и характеристик драйверов шаговых двигателей. L298N не подходит для ЧПУ станка, поскольку не имеет деления шага. DRV8825 и A4988 имеют не существенную разницу в стоимости, по этому выбор зависит от характеристик. Деление шага важная характеристика для ЧПУ станка, поскольку от нее напрямую зависит точность позиционирования осей. При делении шага 1/32 велика вероятность пропуска шага из-за большого количества управляющих импульсов. При делении шага 1/16 обеспечивается высокая точность позиционирования, а так же нет пропусков шагов двигателем. Были выбраны драйверы шаговых двигателей A4988.
ОХРАНА ТРУДА
Охрана труда это система сохранения жизни и здоровья работников в процессе трудовой деятельности, включающая в себя правовые, социально-экономические, организационно-технические, санитарно-гигиенические, лечебно-профилактические, реабилитационные и иные мероприятия.
Цель раздела – дать общие научные основы постановки безопасных методов работы по обеспечению нормативных условий для высокопродуктивного труда сотрудников, предотвращению производственного травматизма, профзаболеваний, аварий, пожаров и т.д. в производственных помещениях и на рабочих местах при проведении расчета шагового синхронного двигателя для лазерно–гравировального станка с ЧПУ.
8.1. ПРАВОВЫЕ ОСНОВЫ ОХРАНЫ ТРУДА
Служба охраны труда и комитеты (комиссии) по охране труда в организации.
В целях обеспечения соблюдения требований охраны труда, осуществления контроля за их выполнением у каждого работодателя, осуществляющего производственную деятельность, численность работников которого превышает 50 человек, создается служба охраны труда или вводится должность специалиста по охране труда, имеющего соответствующую подготовку или опыт работы в этой области.
Работодатель, численность работников которого не превышает 50 человек, принимает решение о создании службы охраны труда или введении должности специалиста по охране труда с учетом специфики своей производственной деятельности.
При отсутствии у работодателя службы охраны труда, штатного специалиста по охране труда их функции осуществляют работодатель – физическое лицо – предприниматель (лично), руководитель организации, другой уполномоченный работодателем работник либо организация или специалист, оказывающие услуги в области охраны труда, привлекаемые работодателем по гражданско-правовому договору. Организации, оказывающие услуги в области охраны труда, подлежат обязательной аккредитации, за исключением организаций, проводящих специальную оценку условий труда, порядок аккредитации которых устанавливается законодательством о специальной оценке условий труда. Перечень услуг, для оказания которых необходима аккредитация, правила аккредитации, включающие в себя требования аккредитации, которым должны соответствовать организации, оказывающие услуги в области охраны труда, порядок проведения контроля за деятельностью аккредитованных организаций, порядок приостановления или отзыва аккредитации устанавливаются Советом Министров Луганской Народной Республики.
Структура службы охраны труда в организации и численность работников службы охраны труда определяются работодателем с учетом рекомендаций Совета Министров Луганской Народной Республики [1, ст 240].
По инициативе работодателя и (или) по инициативе работников либо их представительного органа создаются комитеты (комиссии) по охране труда. В их состав на паритетной основе входят представители работодателя и представители выборного органа первичной профсоюзной организации или иного представительного органа работников. Типовое положение о комитете (комиссии) по охране труда утверждается Советом Министров Луганской Народной Республики.
Комитет (комиссия) по охране труда организует совместные действия работодателя и работников по обеспечению требований охраны труда, предупреждению производственного травматизма и профессиональных заболеваний, а также организует проведение проверок условий и охраны труда на рабочих местах и информирование работников о результатах указанных проверок, сбор предложений к разделу коллективного договора (соглашения) об охране труда [1, ст 241].
8.2. ОСНОВЫ ФИЗИОЛОГИИ, ГИГИЕНЫ ТРУДА И ПРОИЗВОДСТВЕННОЙ САНИТАРИИ
Ионизирующие излучения и защита от их влияния.
Ионизирующим излучением называют потоки корпускул (элементарных частиц) и потоки фотонов (квантов электромагнитного поля), которые при движении через вещество ионизируют его атомы и молекулы.
Наиболее известны альфа-частицы (представляющие собой ядра гелия и состоящие из двух протонов и двух нейтронов), бета-частицы (представляющие собой электрон) и гамма-излучение (представляющее собой кванты электромагнитного поля определенного диапазона частот).
Дуализм "частица - волна" квантового мира позволяет говорить об альфа-излучении и бета-излучении. Ионизирующими являются также рентгеновское, тормозное и космическое излучения, потоки протонов, нейтронов и позитронов.
Биологическое действие ионизирующего излучения заключается в том, что поглощенная веществом энергия проходящего через него излучения расходуется на разрыв химических связей атомов и молекул, что нарушает нормальное функционирование клеток живой ткани.
Различают следующие эффекты воздействия ионизирующего излучения на организм человека: соматические - острая лучевая болезнь, хроническая лучевая болезнь, местные лучевые поражения; сомато-стохастические (злокачественные опухоли, нарушения развития плода, сокращение продолжительности жизни) и генетические (генные мутации, хромосомные аберрации).
Основные принципы обеспечения радиационной безопасности: уменьшение мощности источников до минимальных величин (защита количеством); сокращение времени работы с источниками (защита временем); увеличение расстояния от источника до работающих (защита расстоянием) и экранирование источников излучения материалами, поглощающими ионизирующие излучения (защита экранами).
Защита количеством подразумевает проведение работы с минимальными количествами радиоактивных веществ, в итоге пропорционально сокращается мощность излучения.
Защита временем основана на сокращении времени работы с источником, что позволяет уменьшить дозы облучения персонала.
Защита расстоянием - достаточно простой и надежный способ защиты от излучений. Это связано со способностью излучения терять свою энергию во взаимодействиях с веществом: чем больше расстояние от источника, тем больше процессов взаимодействия излучения с атомами и молекулами, что в конечном итоге приводит к снижению дозы облучения персонала.
Защита экранами - наиболее эффективный способ защиты изготовления экранов применяют различные материалы, а их толщина определяется мощностью излучения.
По своему назначению защитные экраны условно разделяются на пять групп:
1) защитные экраны-контейнеры, в которые помещаются радиоактивные препараты; они широко используются при транспортировке радиоактивных веществ и источников излучений;
2) защитные экраны для оборудования; в этом случае экранами полностью окружают все рабочее оборудование при нахождении радиоактивного препарата в рабочем положении или при включении высокого (или ускоряющего) напряжения на источнике ионизирующей радиации;
3) передвижные защитные экраны; этот тип защитных экранов применяется для защиты рабочего места на различных участках рабочей зоны;
4) защитные экраны, монтируемые как части строительных конструкций (стены, перекрытия полов и потолков, специальные двери и т.д.); такой вид защитных экранов предназначается для защиты помещений, в которых постоянно находится персонал, и прилегающей территории;
5) экраны индивидуальных средств защиты (щиток из оргстекла, смотровые стекла пневмокостюмов, просвинцованные перчатки и др.).
Защита от открытых источников ионизирующих излучений предусматривает как защиту от внешнего облучения, так и защиту персонала от внутреннего облучения, связанного с возможным проникновением радиоактивных веществ в организм через органы дыхания, пищеварения или через кожу.
Все виды работ с открытыми источниками ионизирующих излучений разделены на три класса. Чем выше класс выполняемых работ, тем жестче гигиенические требования по защите персонала от внутреннего переоблучения [ ГОСТ 12.4.120-83 ].
8.3. ОСНОВЫ ТЕХНИКИ БЕЗОПАСНОСТИ НА ПРОИЗВОДСТВЕ
Безопасность при эксплуатации электрооборудования.
Основные причины и условия поражения электрическим током:
· прикосновение к токоведущим частям, находящимся под напряжением;
· прикосновение к нетоковедущим, но токопроводящим частям
электрооборудования, оказавшиеся под напряжением из-за неисправности изоляции или защитных устройств;
· попадание под шаговое напряжение;
· нарушение правил технической эксплуатации электроустановок,
потребителей и правил техники безопасности.
На степень поражения электрическим током оказывает влияние следующие факторы:
· род тока (постоянный, переменный)– при переменном токе для поражения электрическим током человека требуется гораздо меньшая величина тока, по сравнению с постоянным.
· величина тока– ощутимый ток появляется при переменном токе 0,6-1,5 мА с частотой 50 Гц и постоянном - 5-7 мА. Пороговыми неотпускающими токами являются 10-15 мА для переменного (50 Гц) и 50-60 мА - для постоянного тока. Эти токи вызывают едва переносимые боли во всей руке. Во многих случаях руку невозможно оторвать от электрода;
· частота переменного тока– наиболее опасным является переменный ток частотой 20— 100Гц. При частоте менее 20 или более 100 Гц опасность поражения током заметно снижается.
· величина приложенного напряжения– от него зависят сопротивление кожных покровов и сила тока, проходящего через организм человека;
· путь протекания тока– играет самую существенную роль в исходе поражения, так как он может пройти через жизненно важные органы: сердце, лёгкие, головной мозг и др;
· длительность воздействия;
· окружающая среда– влага, пыль, агрессивные пары и газы, высокая температура разрушающе действуют на изоляцию электроустановок, резко снижая ее сопротивление и создавая опасность перехода напряжения на нетоковедущие металлические части оборудования, к которым может прикасаться человек;
· сопротивление тела человека;
· схема включения человека в цепь (двухфазное, однофазное);
· площадь прикосновения тела с электродом;
· индивидуальные свойства организма;
· фактор внимания.
Методы и способы безопасной эксплуатации электроустановок.
Изоляция токоведущих частей. Электрическая изоляция – это слой диэлектрика или конструкция, выполненная из диэлектрика, которым токоведущие элементы отделяются от других частей.
Защитное разделение электросетей. Разветвлённая электрическая сеть большой протяженности имеет значительную ёмкость относительно земли и сравнительно небольшое активное сопротивление изоляции. В таких сетях при однофазном прикосновении человек оказывается под напряжением, близким к фазному.
Применение малого напряжения. Под малым понимают напряжение не выше 42В, применяемое для уменьшения опасности поражения электрическим током.
Защита от случайного прикосновения. Чтобы исключить возможность случайного прикосновения к токоведущим частям, их располагают на недоступной высоте или применяют ограждения, блокировки, сигнализацию.
Защитное заземление. Наиболее распространенной и надежной мерой защиты от поражения электрическим током является защитное заземление – преднамеренное электрическое соединение с землей металлических нетоковедущих частей, которые могут оказаться под напряжением. С помощью заземлителя уменьшается напряжение на корпусе ( в случае случайного замыкания на него тока), а также напряжение прикосновения и шаговое напряжение в зоне растекания этого тока.
Защитное зануление. Зануление в электроустановках до 1000В – это преднамеренное соединение частей электроустановок, нормально не находящихся под напряжением, с глухо заземленной нейтралью источника питания. Зануление является эффективной мерой защиты при питании электрооборудования от четырехпроводных сетей с заземленной нейтралью питающего трансформатора напряжением 380/220В. В соответствии с ПУЭ зануление корпусов выполняют в тех же случаях, что и защитное заземление.
Причины возникновения статического электричества.
Возникает это физическое явление вследствие трения диэлектриков друг о друга или о металлы. На поверхностях начинают накапливаться заряды, которые способны удерживаться на большие промежутки времени. Интенсивность возникновения зарядов увеличивается пропорционально скорости трения, площади соприкосновения, приложенной силе и удельному сопротивлению материалов. Второй причиной считают электроиндукцию, вследствие которой изолированные от земли поверхности накапливают заряженные частицы. Например, на металлических предметах, находящихся вблизи высоковольтных ЛЭП, может накапливаться статическое электричество в сухую погоду. В химической отрасли явление наблюдается по время плавления пластичных материалов. В радиоэлектронике разряды возникают во время производства техники, где применяются диэлектрики.
Основные способы защиты от статического электричества следующие: заземление оборудования, сосудов и коммуникаций, в которых накапливается статическое электричество; увеличение поверхностной проводимости диэлектрика; увлажнение окружающего воздуха; ионизация воздуха или среды нейтрализатором статического электричества; подбор контактных пар; изменение режимов технологического процесса, использование операторами спецобуви с электропроводящей подошвой и др.[11].
На основании анализа условий труда при эксплуатации электрооборудования проведем оценочный расчет состояния электробезопасности на рабочих местах, если:
Напряжение электросети  , время аварийного отключения
, время аварийного отключения  , коэфициэнт напряжения прикосновения
, коэфициэнт напряжения прикосновения  , относительная влажность воздуха
, относительная влажность воздуха  ,температура в помещении
,температура в помещении  , режим работы электроустановки – аварийный.
, режим работы электроустановки – аварийный.
Расчет величины напряжения прикосновения в «аварийном» режиме (обрыв в цепи Rз), В:
 (8.1)
(8.1)
где Rч – сопротивление тела человека, Ом, в инженерных расчетах принимают Rч=1000 Ом;
Ir—ток, проходящий через тело человека, А:
 (8.2)
(8.2)
где Uф – напряжение в электросети, по своему варианту, В;
Rч=1000 Ом;
Rф – минимальное измеренное фазное сопротивление, Ом.
Оценка фактического напряжения прикосновения на рабочем месте по коэффициенту соответствия условий труда нормативным требованиям:
 (8.3)
(8.3)
При выборе предельно-допустимых значений напряжения прикосновения следует учитывать негативное влияние на состояние электробезопасности высоких значений температуры окружающей среды Т, [°С] и относительной влажности в помещении, φ, %. Поэтому, если по варианту Т>25°С и φ>75% необходимо принять поправочный коэффициент К = 0,33
 , (8.4)
, (8.4)
где Uпт – табличное значение предельно-допустимой величины.
 (8.5)
(8.5)
 (8.6)
(8.6)
 (8.7)
(8.7)
 (8.6)
(8.6)
Если Кс≤1,то можно сделать вывод о соответствии состояния электробезопасности ГОСТ 12.1.038-82.
8.4. ОСНОВЫ ПОЖАРНОЙ БЕЗОПАСНОСТИ
Пожарная безопасность на производстве
На основании статистических данных можно сделать вывод, что основными причинами пожаров на производстве являются:
· неосторожное обращение с огнем;
· неудовлетворительное состояние электротехнических устройств и нарушение правил их монтажа и эксплуатации;
· нарушение режимов технологических процессов;
· неисправность отопительных приборов и нарушение правил их эксплуатации;
· невыполнение требований нормативных документов по вопросам пожарной безопасности.
Пожароопасность веществ и материалов.
Пожарная и взрывная опасность веществ и материалов определяется:
группой горючести, температурой вспышки, температурой самовоспламенения, минимальной энергией зажигания, нижним и верхним пределом воспламенения, давлением взрыва, дисперсностью, летучестью и т.д.
Горючесть - способность веществ и материалов к горению под воздействием источника зажигания. По горючести вещества и материалы во всех агрегатных состояниях подразделяются на три группы: негорючие (несгораемые), трудногорючие (трудносгораемые), горючие (сгораемые).
Температура вспышки - наименьшая температура горючего вещества, при которой образовавшиеся над его поверхностью пары и газы способны вспыхивать в воздухе от источника зажигания, однако скорость образования паров или газов еще не достаточная для поддержания устойчивого горения.
Температура воспламенения - наименьшая температура горючего вещества, при которой образовавшиеся над его поверхностью пары и газы вспыхивают в воздухе от источника зажигания и продолжают гореть, т.к. скорость образования паров или газов достаточная для поддержания устойчивого пламенного горения.
Температура самовоспламенения - самая низкая температура вещества, при которой происходит резкое увеличение скорости экзотермической реакции, приводящее к пламенному горению. Температура самовоспламенения газов и паров горючих жидкостей находится в пределах 250 - 700°С, для твердых веществ, например цинка, магния, алюминия - 450 - 800°С, а для дерева, каменного угля, торфа-250-450°С.
Пожары в зависимости от классификации разделяються на 5 классов:
А,B,C,D,E.
Пожароопасные зоны – пространства в помещении или вне его, в котором находятся горючие вещества, как при нормальном осуществлении технологического процесса, так и в результате его нарушения.
В соответствии с ПУЭ пожароопасные помещения классифицируются на: П-I, П-II, П-IIа, П-III.
Взрывоопасные зоны – помещения или часть его или вне помещения, где образуются взрывоопасные смеси как при нормальном протекании технологического процесса, так и в аварийных ситуациях.
В соответствии с ПУЭ взрывоопасные помещения разделяются на 2 группы – для паров и для газов.
Для газов: В-I, В-Iа, В-Iб, В-Iв, В-Iг.
Для паров: В-II, В-IIа.
Все установки и средства, применяемые для тушения пожаров подразделяются на стационарные, передвижные и первичные.
Стационарные пожаротушащие установки представляют собой неподвижно смонтированные аппараты, трубопроводы и оборудование, которые предназначаются для подачи огнетушащих веществ к местам загорания. Такие установки могут быть автоматическими или дистанционными. Автоматические установки при возникновении пожара приводятся в действие соответствующим датчиком, а дистанционные — людьми. В качестве огнетушащего вещества в стационарных установках пожаротушения применяются: вода, пена, порошок, инертные газы. Наибольшее распространение в настоящее время преобрели спринклерные и дренчерные установки тушения пожара водой.
Передвижными пожарными средствами являются различные пожарные машины, автонасосы, мотопомпы, пожарные поезда, теплоходы, танки, самолеты и др.
Первичные средства пожаротушения предназначены для ликвидации небольших загораний до прибытия пожарной команды. К ним относятся передвижные и ручные огнетушители, внутренние пожарные краны, ящики с песком, кошмы, асбестовые покрывала, бочки с водой и ведра к ним, противопожарные щиты с набором инвентаря и др. Наибольшее распространение в качестве первичных средств тушения пожаров получили различные огнетушители.
Пожарная связь и сигнализация могут осуществляться телефоном специального или общего назначения, радиосвязью, электрической пожарной сигнализацией (ЭПС), сиренами. ЭПС является наиболее быстрым и надежным способом извещения о возникшем пожаре[12].
ВЫВОДЫ
В данном разделе бакалаврской работы рассмотрены общие вопросы охраны труда и техники безопасности в помещениях и на рабочих местах при проведении расчета шагового синхронного двигателя для лазерно–гравировального станка с ЧПУ, по созданию безопасных и комфортных условий труда, направленных на сохранение жизни, здоровья и работоспособности человека в процессе трудовой деятельности, проведен оценочный расчет состояния электробезопасности на рабочем месте.
ЗАКЛЮЧЕНИЕ
В соответствии с заданием в настоящей бакалаврской работе разработан лазерно-гравировальный ЧПУ станок.
В результате проектирования было принято решение использовать в качестве исполнительных двигателей синхронные шаговые двигатели NEMA 17HS4401. Номинальный ток данных двигателей 1,7  , напряжение питания 12
, напряжение питания 12  .В качестве контроллера используется плата Arduino UNO на основе микроконтроллера Atmel MEGA 328P. Были выбраны драйверы шаговых двигателей А4988, благодаря своей низкой стоимости и высокой точности. В качестве источника питания использован компьютерный блок питания мощностью 300
.В качестве контроллера используется плата Arduino UNO на основе микроконтроллера Atmel MEGA 328P. Были выбраны драйверы шаговых двигателей А4988, благодаря своей низкой стоимости и высокой точности. В качестве источника питания использован компьютерный блок питания мощностью 300  .
.
В качестве шпинделя для двухосевого ЧПУ станка был выбран лазерный модуль мощностью 1000  .Модуль имеет собственный драйвер и плату управления, позволяющую регулировать мощность лазера через ШИМ, что не мало важный показатель для ЧПУ станка.
.Модуль имеет собственный драйвер и плату управления, позволяющую регулировать мощность лазера через ШИМ, что не мало важный показатель для ЧПУ станка.
В специальной части описана сборка и наладка ЧПУ станка.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Трудовой кодекс ЛНР.
2. Приказ об утверждении Правил пожарной безопасности в Луганской Народной Республике
3. 3усман В. Г., Ратмиров В.А., Система цифрового управления с шаговым двигателем, «Станки и инструмент», 1958, № 12.
4. Электрические машины: Учеб. для вузов. Вольдек А.И. 3-е изд., перераб. и доп. –Л.: Энергия, 1998. 832с.
5. Зайцев Н.Л. Экономика промышленного предприятия: Учебник; 2-е изд., перераб. и доп. – М.: ИНФРА-М, 1998. 336 с.
6. Безопасность производственных процессов: справочник/ Под ред. С.В. Белова – М.: Машиностроение, 1995.- 448с.
7. Ф.Л.Литвин. Проектирование механизмов и деталей приборов. Ленинград. «Машиностроение». 1973.
8. Сосонкин В.Л., Мартинов Г.М. Методика программирования станков с ЧПУ на наиболее полном полигоне вспомогательных G–функций.
9. И.Я.Левин. Справочник конструктора точных приборов. Москва. ОБОРОНГИЗ. 1962.
10. П.И.Орлов. Основы конструирования. В 3-х томах. Москва. «Машиностроение». 1977.
11. Справочник по охране труда на промышленном предприятии. Под ред. К.А. Ткачука, К.: Техника, 1991. – 285 с.
12. В.Ц. Жидецкий, В.С. Джигирей, А.В. Мельников. Основы охраны труда. Львов. 2000.
13. Ермолин Н.П. "Электрические машины малой мощности" издание второе.: Высшая школа, 1967. - 504 с.
14. Исмаилов Ш.Ю. Автоматические системы и приборы с шаговыми двигателями.: Энергия, 1968.
15. Ратмиров В.А. Ивоботенко Б.А. Шаговые двигатели для систем автоматического управления.: Госэнергоиздат, 1962.
16. Кенио Т. Шаговые двигатели и их микропроцессорные системы управления.: Энергоатомиздат, 1987.
17. Ловыгин А.А., Васильев А.В., Кривцов С.Ю. Современный станок с ЧПУ и CAD_CAM, 2006, 286 с.
18. Сосонкин В.Л., Мартинов Г.М. Системы числового программного управления, 2005, 200 с.
19. Гурьянихин В.Ф., М.Н.Булыгина Автоматизированная подготовка управляющих программ для станков с ЧПУ, 2001, 90 с.
ОБЗОР КОНСТРУКЦИЙ И ВИДОВ ШАГОВЫХ ДВИГАТЕЛЕЙ
1.1. Шаговый двигатель - это электромеханическое устройство, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением.
Шаговый двигатель в комплекте с драйвером занимается преобразованием числа входящих импульсов в заданное угловое перемещение вала. Устройство сопрягается с цифровой техникой, управляющий сигнал зачастую аналоговый. Драйвер, получающий на контакты цифровой сигнал, декодирует волну, формирует нужные сигналы управления двигателем.
Особенностью шагового двигателя является форма стального ротора. Ротор снабжен полюсами, подчеркнутыми путем вынесения на кончик острого (тупого зубца). Металл, притягиваемый катушками статора, обладает некоторой намагниченностью, вызванной действием поля. Точное позиционирование полюсов статора обеспечивает шаговому двигателю уникальное свойство: точное позиционирование по углу поворота вала.
Ключевыми преимуществами двигателя считают:
· угол поворота ротора определяется числом импульсов, которые поданы на двигатель
· двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
· прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу
· возможность быстрого старта/остановки/реверсирования
· высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
· однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
· возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.
Существуют четыре основные группы двигателей:
· Двигатели с переменным магнитным сопротивлением.
· Двигатели с постоянными магнитами.
· Гибридные двигатели.
· Биполярные и униполярные шаговые двигатели.
Биполярный двигатель имеет одну обмотку в каждой фазе, для изменения направления магнитного поля меняет направление тока драйвером. Для такого типа двигателя требуется мостовой драйвер. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис 1.1,А).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа.
Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 1.1,Б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4–х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 1.1,В).

Рис. 1.1. Типы обмоток шаговых двигателей.
При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности
.
Типы шаговых двигателей
Дата: 2019-04-22, просмотров: 1125.