В постройке механической части используются фанера, мебельные направляющие.

Рис. 6.1. Сборка каркаса, а так же стола оси Y станка.
Материалы выбираются ввиду своей дешевизны, а так же с учетом отсутствия боковых нагрузок при работе, по сравнению с фрезерным ЧПУ станком. Заготовки вырезались по заранее подготовленным чертежам.

Рис. 6.2. Установка направляющих оси X ЧПУ станка.
После установки оси X собирается и устанавливается “каретка” оси X, которая включает в себя бормашинку.
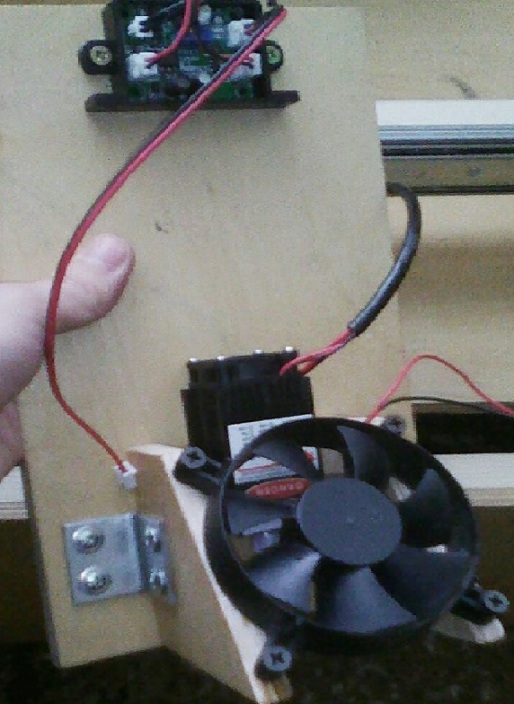
Рис. 6.3.”Каретка” оси X.
На ось X устанавливается “каретка” с учетом того, что фокусное расстояние до обрабатываемой заготовки должно быть 5-9см.
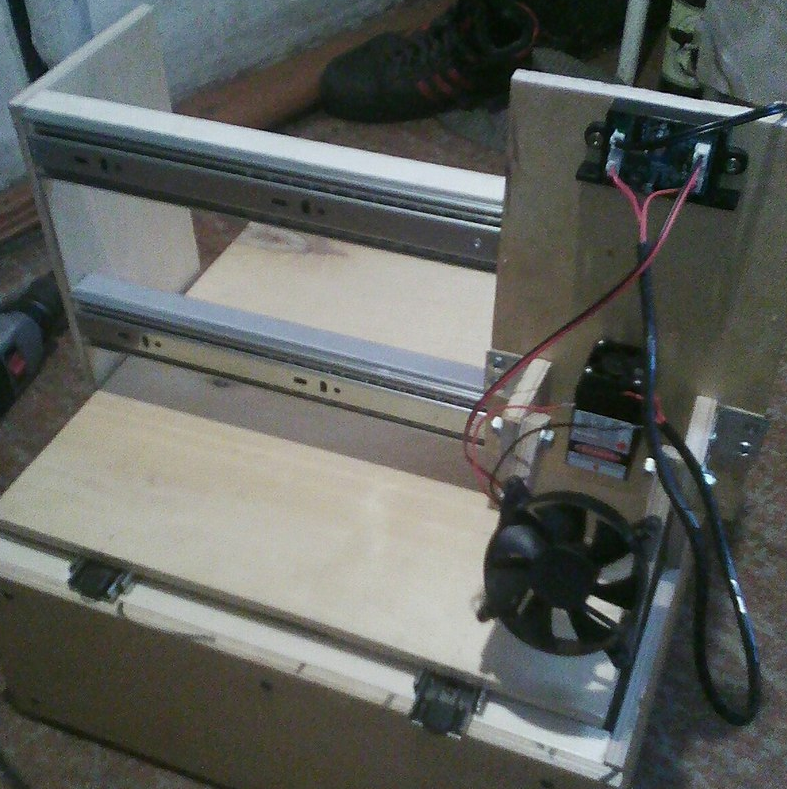
Рис. 6.4. Подготовленная под установку электроники механическая часть.
Для установки двигателей на оси X и Y изготавливаются кронштейны из металлических уголков. А так же резиновые прокладки для уменьшения влияния вибрации.
В данном ЧПУ станке используется ременная передача, поскольку она обеспечивает большую скорость, по сравнению с винтовой передачей, а так же меньшую нагрузку на двигатели. Используется зубчатый ремень стандарта GT2 с шагом зубцов 2мм и шириной 6мм.
На вал двигателей крепятся специальные шестерни для ремней стандарта GT2.
На противоположной от двигателя стороне станка устанавливается шкив для натяжения ремня, который представляет собой подшипник с юбкой, для предотвращения соскока ремня.
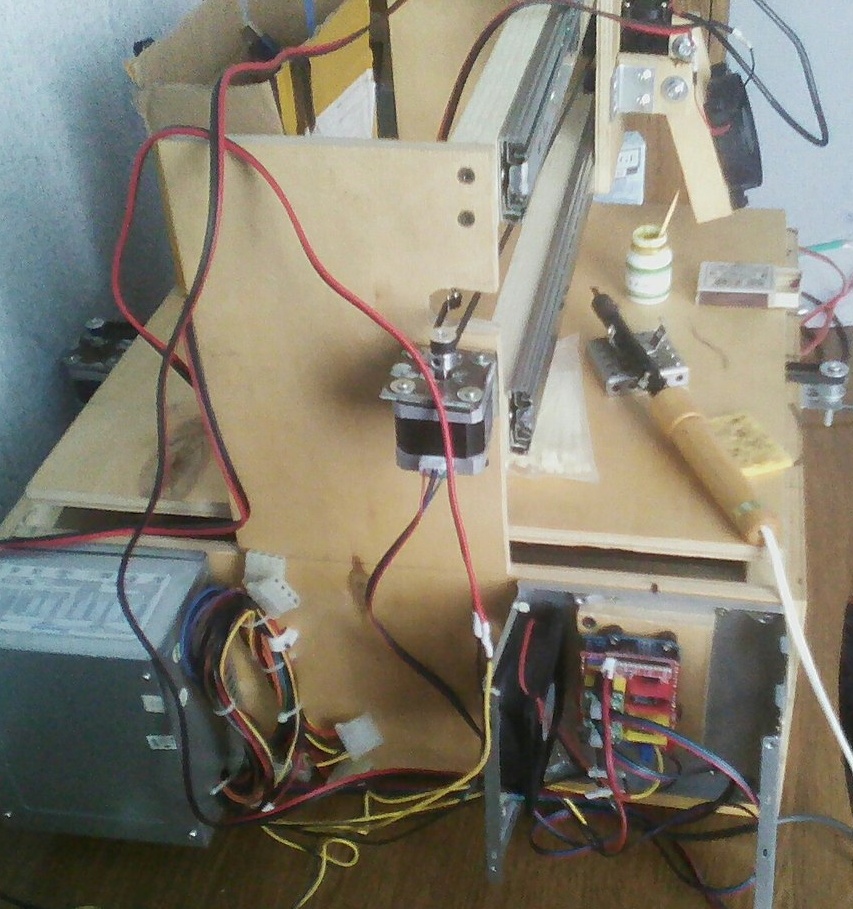
Рис. 6.5. Установка блока питания и блока управления.
Блок питания и блок управления закрепляются на корпусе станка, что обеспечивает удобство транспортировки. В блок управления устанавливается кулер для охлаждения драйверов шаговых двигателей.
Так же убираются и изолируются все лишние провода блока питания.
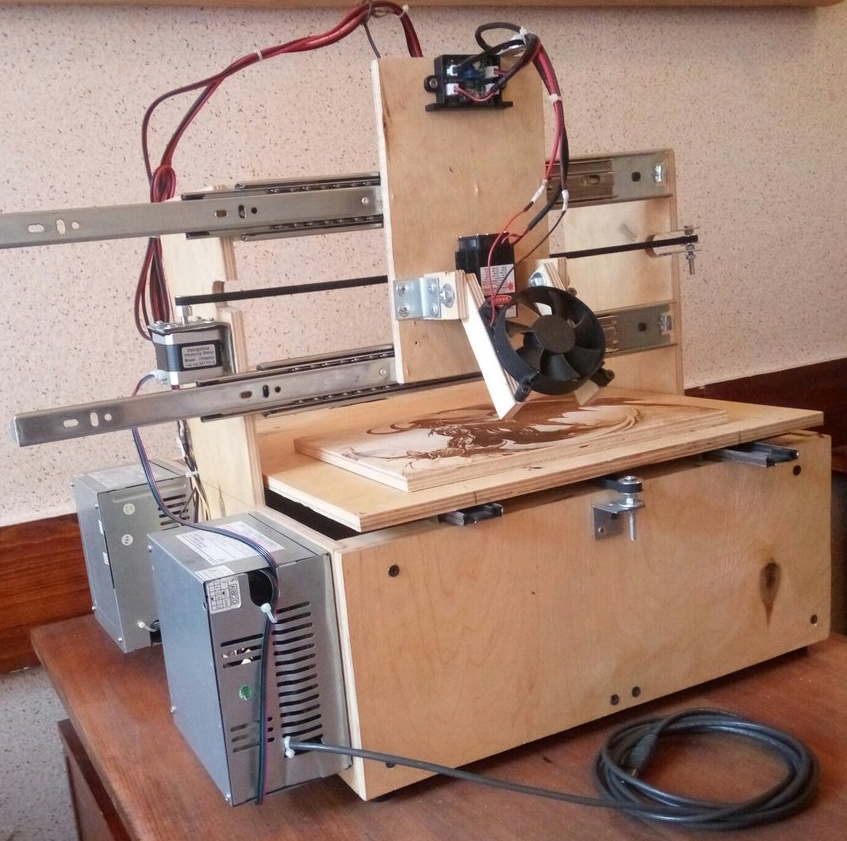
Рис. 6.6. ЧПУ станок в сборе.
Электроника ЧПУ станка.
Для управления станком используется плата Arduino UNO, которая в свою очередь подключается к ПК.
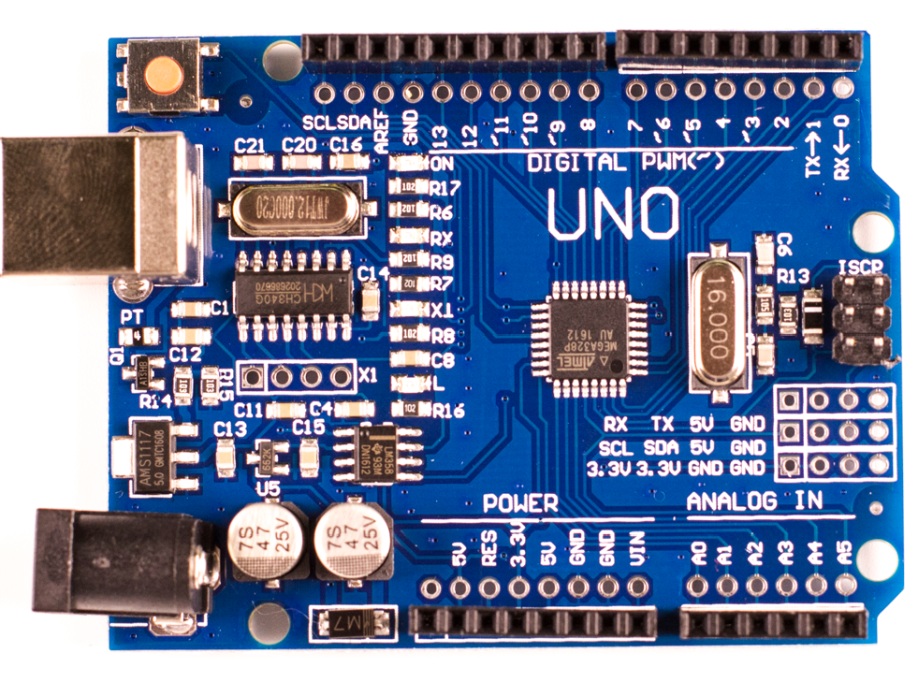
Рис. 6.6. Плата Arduino UNO.
Существует множество разновидностей Arduino, которые отличаются размером и количеством выводов. Arduino представляет собой инструмент, с помощью которого можно создавать различные электронные устройства. По сути, это аппаратная вычислительная платформа универсального предназначения. Она может использоваться как для построения простых схем, так и для реализации сложных проектов.
Для данной платформы существует огромное множество различных плат расширения, которые упрощают сборку электронных устройств, а так же расширяют возможности Arduino.
При сборке ЧПУ станка рекомендуется использовать плату расширения
CNC shield v3. Она предназначена для подключения драйверов и шаговых двигателей к Arduino.
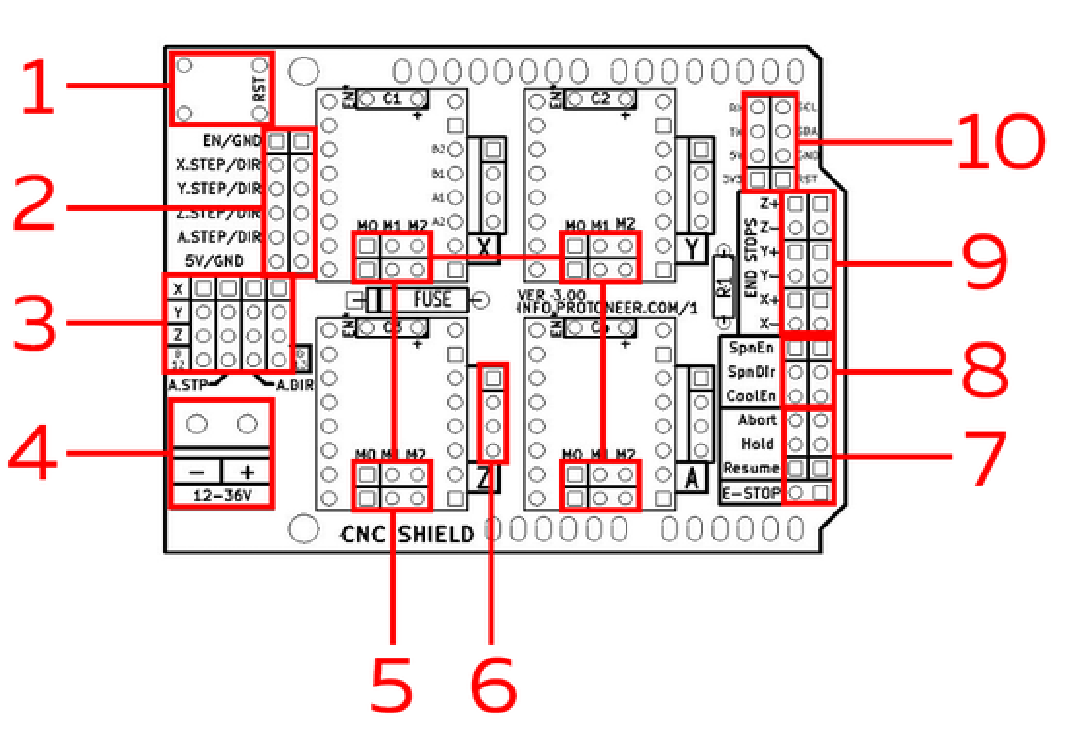
Рис. 6.7. CNC shield v3.
1 – Кнопка сброса.
2 – Колодки контактов для подключения внешних драйверов двигателей.
3 – Ось A может дублировать одну из осей X, Y, Z с помощью дополнительного двигателя и драйвера или работать автономно (например ось A может быть использована для двигателя экструдера, в случае 3D-принтера). Эти колодки контактов служат для настройки оси A. Для дублирования осей нужно установить перемычки на эти колодки.
4 – Разъем питания. На плату необходимо подавать питание 12 – 36 В.
5 – Возле каждого слота для подключения драйвера двигателей имеется колодка управления микрошагом двигателя. В зависимости от выставленных перемычек вы можете добиться вплоть до 1/32 шага на драйверах DRV8825 и 1/16 шага на драйверах A4988.
6 – Колодки для подключения биполярного шагового двигателя (на 4 провода).
7 – Колодка для подключения внешних кнопок управления:
· Отмена;
· Пауза;
· Продолжить;
· Стоп.
8 – Колодка для подключения контактов:
· Включения шпинделя (SpnEn);
· Направления шпинделя (SpnDir);
· Включения подачи охлаждения (CoolEn);
9 – Колодка контактов для подключения 3 концевых выключателей.
10 – Колодка контактов для интерфейсов UART и I2C:
· Контакты UART: RX, TX, 5V, 3V3;
· Контакты I2C: SCL, SDA, GND, RST.
Характеристики драйверов А4988:
· напряжения питания: от 8 до 35  ;
;
· возможность установки шага: от 1 до 1/16 от максимального шага;
· напряжение логики: 3-5.5  ;
;
· защита от перегрева;
· максимальный ток на фазу: 1  без радиатора, 2
без радиатора, 2  с радиатором;
с радиатором;
· расстояние между рядами ножек: 12 мм;
· размер платы: 20 х 15 мм;
· габариты драйвера: 20 х 15 х 10 мм;
· габариты радиатора: 9 х 5 х 9 мм;
· вес с радиатором: 3 г;
· вес без радиатора: 2 г.
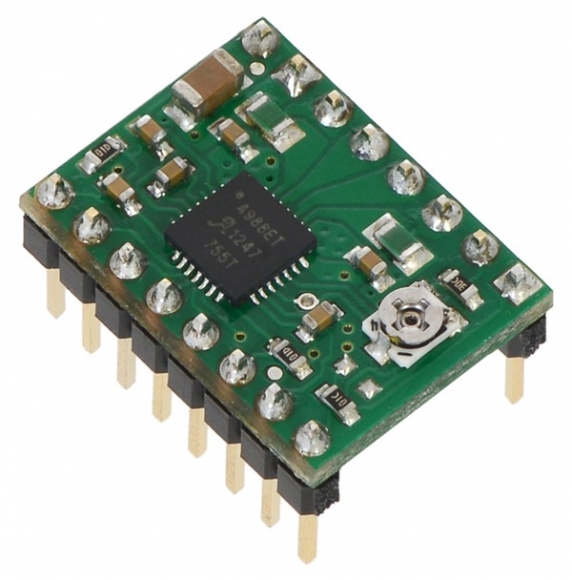
Рис. 6.8. Драйвер шагового двигателя A4988.
Особенностями A4988 являются регулируемый ток, защита от перегрузки и перегрева, драйвер также имеет пять вариантов микрошага (вплоть до 1/16-шага). Он работает от напряжения 8 - 35 В и может обеспечить ток до 1 А на фазу без радиатора и дополнительного охлаждения (дополнительное охлаждение необходимо при подаче тока в 2 A на каждую обмотку).
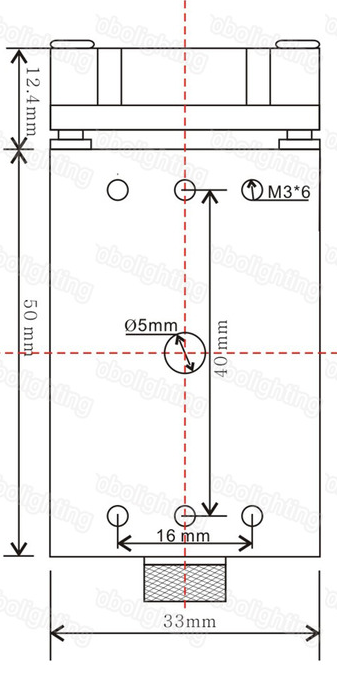
Рис. 6.9. Лазерный модуль.
Корпус лазерного модуля представляет собой радиатор. На него установлен кулер для охлаждения лазерного диода, а так же фокусировочная линза.
Наладка ЧПУ станка.
После сборки следует приступить к наладке станка. Для этого необходимо прошить плату Arduino. Для этого существует среда для программирования Arduino IDE. В данном случае была установлена прошивка GRBL 1.1.f.
После установки необходимо внести параметры станка в память микропроцессора. Параметры можно просмотреть командой $$ в любой программе, работающей с прошивкой GRBL 1.1f.
При первоначальной настройке важными параметрами являются:
$32 - Режим лазера, логический. При значении 1 параметр включен. Это позволяет управлять лазером с помощью ШИМ.
$100, $101, $102 – [X,Y,Z] шагов/мм. Для настройки этого значения необходимо знать размер шестерней ременной передачи, колличество полных шагов на оборот двигателей, колличество микрошагов на один шаг.
Значение расчитывается по формуле:
 , (6.1)
, (6.1)
где,  – количество шагов на 1 оборот умножается на микрошаг (дробление шага);
– количество шагов на 1 оборот умножается на микрошаг (дробление шага);  – шаг зубца ремня умножается на количество зубцов шестерни.
– шаг зубца ремня умножается на количество зубцов шестерни.
$110, $111 и $112 – [X,Y,Z] Максимальная скорость, мм/мин. Оптимальная максимальная скорость для каждого станка своя, находится экспериментальным путем.
$120, $121, $122 – [X,Y,Z] Ускорение, мм/сек2. Ускорение, как и скорость подбирается экспериментальным путем.
После настройки перечисленных параметров можно начать работу со станком, но прошивка GRBL 1.1.f имеет множество дополнительных настроек, таких как: установка концевых выключателей, настройка функции поиска нулевой точки, программное ограничение рабочего поля станка и т.д.
Дата: 2019-04-22, просмотров: 894.