Склад является наиболее общим элементом логистических цепей. Рационализация материальных потоков на нем – резерв повышения эффективности функционирования любого предприятия.
Применение метода Парето позволяет минимизировать количество передвижений на складе посредством разделения всего ассортимента на группы, требующие большого количества перемещений, и группы, к которым обращаются достаточно редко.
Как правило, часто отпускаемые товары составляют лишь небольшую часть ассортимента, и располагать их необходимо в удобных, максимально приближенных к зонам отпуска местах, вдоль так называемых «горячих» линий. Товары, требующиеся реже, отодвигают на «второй план» и размещают вдоль «холодных» линий.
Вдоль «горячих» линий могут располагаться также крупногабаритные товары и товары, хранящиеся без тары, так как их перемещение связано со значительными трудностями [6].
Графическая иллюстрация метода Парето представлена на листе 6 графической части проекта.
Конструкторская разработка (проектирование комплекса передвижных стеллажей КСП – 2,0–5,4)
Устройство и принцип работы комплекса передвижных стеллажей КСП – 2,0 – 5,4
Предназначен для хранения, уложенных в тару или на плоские поддоны массой брутто 1 т, на складах предприятия снабжения. Обслуживается из 13 передвижных стеллажей с одним проходом, который может быть образован между любыми смежными стеллажами в результате их раздвижения. Представляет собой сборно-разборную конструкцию, состоящую из перфорированных стоек, полок для груза, ограничителей, и смонтированную на раме с колесами. Каждый стеллаж имеет механизм передвижения.
Основные технические данные комплекса приведены в таблице 5.1.
Таблица 5.1 – Технические данные стенда
| Допускаемая нагрузка, т: | |
| на ячейку | 2 |
| на комплекс | 624 |
| Скорость передвижения стеллажей, м/мин | 4 |
| Число: | |
| ячеек встеллаже | 24 |
| грузовых мест в ячейке | 2 |
| ячеек в комплексе | 312 |
| Ширина прохода между стеллажами, мм | 2000 |
| Установленная мощность, кВт | 19,5 |
| Габаритные размеры, мм: | |
| ячейки | 265x900x1250 |
| стеллажа | 8740x2090x5400 |
| комплекса | 28500x8740x5400 |
| Масса комплекса, т | 47,5 |
Технические расчеты
Выбор схемы передвижения контейнеров
Проведя анализ существующих схем механизмов подъема, выбираем схему, состоящую из следующих составных частей:
– привод (мотор-редуктор);
– тормоз дисковый:
– барабан:
Перемещение груза осуществляется с помощью тележки.
Исходя из конструкции проектируемого механизма подъема, наиболее рациональной является следующая схема механизма подъема (рисунок 5.1).
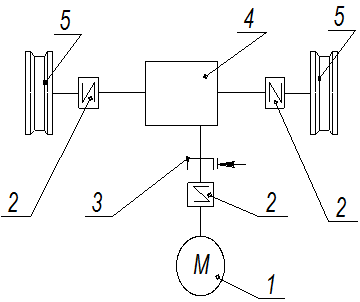
Рисунок 5.1 – Кинематическая схема механизма подъема
1 – электродвигатель;
2 – муфта;
З – тормоз дисковый;
4 – редуктор;
5 – ходовое колесо.
Эта схема позволяет получить привод с минимальными габаритами.
Выбор и расчет ходовых колес
При проектировании механизма передвижения необходимо нагрузку на колеса распределять равномернее. Число ходовых колес в зависимости от грузоподъемности можно принять 4.
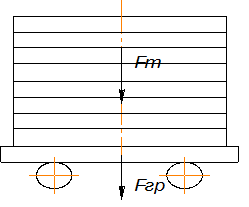
Рисунок 5.2 – Схема для определения распределения нагрузки на колеса механизма передвижения
При симметрично расположенном грузе (рисунок 5.2) нагрузка на колесо будет равна
Fмах=F1= F2=(Fгр+Fт)/z (5.1)
где Fгр и Fт – соответственно вес груза и тележки;
z – число колес.
Fгр=60*9,81=588,6 кН,
Fт=0,1*Fгр=0,1*588,6=58,9 кН. (5.2)
Fмах=588,6+58,9)/4=162кН.
Определяем сопротивление перемещению тележки.
При движении колесного хода тележки преодолеваются сопротивления: перекатыванию колес, уклона рельс, сил инерции при трогании с места. Сумма сопротивлений может быть выражена в виде толкающей силы на ходовых колесах:
Fпер=F+Fα+Fв+Fин (5.3)
Сила F и момент сопротивления М перекатыванию колес по рельсу состоят из сопротивлений: качения колеса, трения в подшипниках, в ребордах колес и торцах втулок.
F=Fмахβ (2*μ +fd)/D (5.4)
где Fмах – общая (суммарная) нагрузка на колеса, Н;
μ – коэффициент трения качения колеса, мм;
f – коэффициент трения в цапфе (подшипниках колес);
β – коэффициент, учитывающий сопротивление от трения реборд и торцов втулок;
d=0,2*D=0,2*200=40 мм – диаметр цапфы (средний диаметр подшипника) колеса, мм.
F=162000*2,5 (2*0,0004+0,015*40)/200=1217 Н,
Сила сопротивления от уклона подкрановых путей определяются по формуле Fα =α*Fмах
Расчетный уклон подкрановых путей с железобетонным фундаментом на металлических балках принимаем 0,001.
Fα =0,001*162000=162Н,
Сила сопротивления движению от ветровой нагрузки при работе кранов в закрытых помещениях равны 0.
Сила сопротивления от инерции поступательно движущихся масс на колесе
Fин= Fо*V/(g*tp) (5.6)
где g – ускорение силы тяжести, (м/с2);
tp – время разгона. Принимаем tp=2 с.
Fин= 162000*0,07/(9,81*2)=578 Н.
Fпер=1216+162+0+578=1956 Н;
Выбор электродвигателя
Определяем потребную мощность механизма передвижения тележки при установившемся движении.
Р= Fпер*V/(1000*ŋ) (5.7)
где ŋ – КПД механизма.
Р= 1956*0,07/(1000*0,8)=0,17 кВт.
Из каталогов подбираем электродвигатель 4А71В8УЗ. Мощность – 250 Вт, число оборотов – 750 мин-1 [12].
Определим частоту вращения ходового колеса
nк=60*V/(π*D)=60*0,07/(π*0,2)=6,7 мин-1. (5.8)
Определим передаточное число механизма передвижения
u=n/ nк=750/6,7=112. (5.9)
Выбор редуктора
Выбираем редуктор КЦ2–500 с передаточным числом Uр=118, номинальный крутящий момент – 8900 Н*м, масса – 420 кг [11].
Проверка: (118–112)*100%/118=5%. Следовательно, дополнительной передачи в приводной станции не используем.
Проверка электродвигателя и тележки
Проверим выбранный двигатель по пусковому моменту.
Находим номинальный момент, передаваемый двумя муфтами двигателя, равный моменту статических сопротивлений
Тмном=Тс=Fпер*D/(2*up*ŋ)= 1956 *0,2/(2*118*0,8)=2 Н*м. (5.10)
Расчетный момент для выбора соединительных муфт
Тм= Тмном*к1*к2 (5.11)
где к1, к2 – коэффициенты.
Тм= 2*1,2*1,1=2,64Н*м.
Из таблиц подбираем муфту упругую со звездочкой с крутящим моментом 63 Н*м, учитывая, что диаметр трансмиссионного вала равен 25 мм. Диаметр муфты D=58 мм.
Всего на валу предусматривается 4 муфты.
Фактическая скорость передвижения тележки
Vфпер=Vпер*u/up=0,07*112/118=0,066 м/с (5.12)
Полагаем, что общее число ходовых колес тележки z=4, из них приводных zпр=2.
Находим максимально допустимое ускорение крана при пуске
амах= {[zпр*(φ/кφ+f*dк/D)/z – (2*μ+f*dк)*kp/D] – Fp/(m*g)}*g (5.13)
где zпр – число приводных ходовых колес;
z – общее число ходовых колес;
φ – коэффициент, учитывающий сцепления ходовых колес с рельсами;
кφ – коэффициент запаса сцепления;
kp – коэффициент, учитывающий дополнительные сопротивления от трения реборд ходовых колес и торцов ступиц колеса;
Fp – ветровая нагрузка;
m – масса тележки, кг.
амах={[2*(0,15/1,2+0,015*0,04/0,2)/4 – (2*0,0004+0,015*0,04)*2/0,2] – -0}*9,81=0,49 м/с2.
Наименьшее допускаемое время пуска по условию сцепления
Tдоп=V/aмах=0,07/0,49=0,14 с. (5.14)
Средний пусковой момент двигателя
Тср.п=(φмах+ φмin)*Тном/2 (5.15)
где φмах – максимальная кратность пускового момента двигателя,
φмin – 1,1…1,4;
Тном=9550*Р/n=9550*0,25/750=1,18 Н*м (5.16)
Тср.п=(15+1,1)*1,18/2=9,5 Н*м.
Момент статических сопротивлений при работе тележки без груза
Тс=FIпер*D/(2*up*ŋ) (5.17)
FIпер=кр*m*g*(f*dк+2μ)/D=2*5890*9,81 (0,015*0,04+2*0,0004)/0,2=809 Н (5.18)
Тс=809*0,2/(2*204,8*0,8)=0,5 Н*м.
Момент инерции ротора двигателя Ip=0,002 кг*м2 и муфт вала IIм=4*Iм=4*0,00028=0,00112 кг*м2
I=Ip+IIм=0,002+0,00112=0,00312 кг*м2 (5.20)
Фактическое время пуска механизма передвижения без груза
tп=δIn/(9,55 (Тср.п – Тс))+9,55 (m+Q) V2/(n((Тср.п-Тс) ŋ (5.21)
tп =1,1*0,00312*750/(9,55 (9,5–8,6))+9,55*(588,6+58,9)*0,072/(750 (9,5–
-8,6)*0,8)=0,4 с.
Фактическое ускорение тележки без груза при пуске
аф= Vфпер/ tп=0,07/3,25=0,02 м/с2< амах =0,49 м/с2 (5.22)
Проверим тележку на отсутствие буксования ходового колеса по рельсу. Проверяем фактический запас сцепления. Суммарная нагрузка на приводные колеса без груза
Fпр=m*zпр*g/z=5890*2*9,81/4=28890 Н (5.23)
Фактический запас сцепления будет равен
kφ=Fпр φ/ (FIпер+mg (a/g-zпрfdk/(zD)) (5.24)
kφ =288900*0,15/(8090+58900*9,81 (0,02/9,81–2*0,015*0,04/(4*0,2))=5,15>1,2
Расчет тормоза
Максимально допустимое замедление крана при торможении
амах=0,49 м/с2.
Принимаем по таблицам амах=0,15 м/с2 [12].
Время при торможении крана без груза
tт= Vфпер/ амах=0,07/0,15=0,47 с (5.25)
Сопротивление при торможении крана без груза
Fттр=mg(fdk+2μ)/D=58900*9,81 (0,015*0,04+2*0,0004)/0,2=4050 Н (5.26)
Момент статических сопротивлений на тормозном валу при торможении тележки
Ттс= FттрDŋ/(2*uр)= 4050*0,2*0,8/(2*118)=2,75Н*м (5.27)
Момент сил инерции при торможении тележки без груза
Ттин=δIn/(9,55*tт)+9,55mV2 ŋ /(n*tт) (5.28)
Ттин = 1,1*0,00312*750/(9,55*0,47)+9,55*58900*0,072*0,8/(750*0,47)=2 Н*м
Расчетный тормозной момент на валу тормоза
Ттр= Ттин-Ттс=2–0,16=1,84≈2 Н*м. (5.29)
Из таблиц выбираем тормоз типа ТКТ-100 с диаметром тормозного шкива Dт=100 мм и наибольшим тормозным моментом Тт=20 Н*м, который следует отрегулировать до Тт=2 Н*м [11].
Расчет валов и опор ходовых колес
Мощность на валу
Р=10-3*F0*V=10-3*1956 *0,07=0,14кВт. (5.30)
Крутящий момент
Т=30*Р/(π*n)= 30*140/(3,14*6,7)=200 Н*м. (5.31)
Составляем расчетную схему приводного вала:
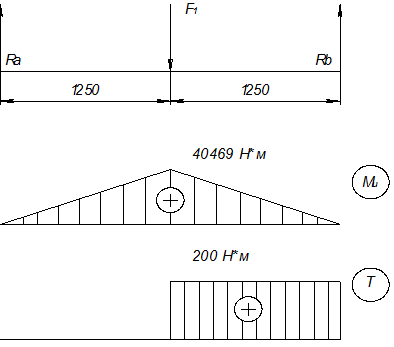
Рисунок 5.3 – Расчетная схема приводного вала
Определим реакции в опорах вала:
 – F1*1,25+Rв*2,5=0;
– F1*1,25+Rв*2,5=0;
Rв=323750*1,25/2,5=161875 Н.
F1*1,25 – RА*2,5=0;
RА=323750*1,25/2,5=161875 Н.
Проверка: Σ Fiy= RА+ Rв-F1=0 32375+32375–64750=0
Изгибающие моменты в сечениях:
Сечение 1: Ми1=1,25*RА =1,25*161875 =202344 Н*м.
Сечение 2: Ми2=1,25*RА =1,25*161875 =202344Н*м.
Вычислим эквивалентный изгибающий момент:
Мэкв=√ М2экв+Т2=√2023442 +2002=202344 Н*м (5.32)
В качестве материала для изготовления вала выбираем сталь 45 с термообработкой (улучшение). Твердость заготовки – 240…270 НВ, 
Рассчитаем диаметр вала в опасном сечении:
dв= 3√ Мэкв/(0,1*[σ])= 3√ 202344 /(0,1*80)≈29 мм (5.33)
Конструктивно принимаем 30 мм
Принимаем диаметр вала под подшипник dп=30 мм, под муфту для соединения валов dм=25 мм.
Для закрепления на валу ходового колеса и соединительной муфты применяем призматические шпонки, выполненные по ГОСТ 23360/СТ СЭВ 189–75. Материал шпонок – сталь 45 с пределом прочности  [13]
[13]
Расчет шпонки под муфту.
Определим рабочую длину шпонки:
lр ≥2*Т*103/(d (h-t1) [σ])=2*60*103/(25 (7–4) 60)=27 мм (5.34)
где Т – наибольший крутящий момент на валу, Нм;
d – диаметр вала, мм;
h – высота шпонки, мм;
 – допускаемые напряжения смятия;
– допускаемые напряжения смятия;
 – заглубление шпонки в валу, мм.
– заглубление шпонки в валу, мм.
Выбрана шпонка для диаметра 40 мм с размерами b=8 мм; h=7 мм; t1=4 мм [13].
Определим полную длину шпонок: l=lp+b=27+8=35 мм.
Длину шпонки выбираем из ряда стандартных (с. 58, /6/): l =36 мм.
Обозначение выбранных шпонок:
Шпонка 8х7х36 ГОСТ 23360–78.
Выбор и расчет подшипников вала
Принимаем под диаметр вала d=30 мм предварительно подшипники шариковые радиальные сферические двухрядные легкой узкой серии по ГОСТ 5720 – 75, 8545 – 75 [14].
Условное обозначение подшипника: 206;
Статическая грузоподъемность: С0=10000 Н;
Динамическая грузоподъемность: С=19500 Н.
Эквивалентная нагрузка на подшипник определяется по формуле:
 (5.35)
(5.35)
где X – коэффициент радиальной нагрузки, X=1;
V – коэффициент вращения, т. к. вращается внутреннее кольцо подшипника, то V=1;
 – коэффициент безопасности;
– коэффициент безопасности;
 – температурный коэффициент;
– температурный коэффициент;
Расчет подшипника проводим по номинальной долговечности:
 (5.36)
(5.36)
где n=6,7 об/мин – частота вращения вала;
Lh=(19500/5499)3*106/(60*6,7)=110924>27500
Значит, назначенный подшипник пригоден для эксплуатации в данных условиях.
Дата: 2019-04-22, просмотров: 596.