Программное управление станком является типичной задачей управления в реальном масштабе времени. Это требует правильного сочетания аппаратных и программных ресурсов системы с внешними устройствами. В общем случае управление оборудованием сводится к обмену информацией между управляющей ЭВМ и внешними устройствами, входящими в его состав.
Блок-схема головного модуля программы управления станком представлена на рисунке 6.1.
Он представляет собой диспетчер, направляющий работу системы по одному из двух путей, соответствующих двум возможным режимам работы станка: автоматическая обработка (АUТО), ручное управление (НAND). Перед селекцией режима производится инициализация системы управления подпрограммой SYSINIT. При инициализации выполняются следующие действия: подготовка силовой части приводов и электроавтоматики, установка рабочих органов в нулевое положение, сброс системы управления приводами и информационной системы. После инициализации следует подтверждение начала работы, в противном случае программа завершается с выдачей соответствующего сообщения.
Режим автоматической обработки начинается с подпрограммы RDPRG, которая позволяет вводить программу обработки с клавиатуры или считать готовую с диска. Программа вводится покадрово, каждый кадр соответствует какой-либо технологической операции (например, включение шпинделя или обработка круглого контура с заданными координатами). Для проверки и преобразования входной программы во внутренний формат данных системы используется подпрограмма-транслятор CHECK. После преобразования данных следует запрос на начало обработки. В случае утвердительного ответа на данный запрос, начинается циклическое выполнение программы обработки.
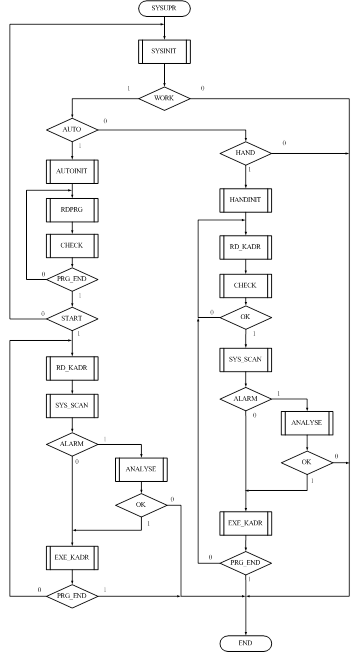
Рисунок 6.1 – Блок-схема головного модуля программы управления станком
Выполняется считывание кадра управляющей программы подпрограммой RD_КАDR и его анализ (определение типа интерполяции, рабочего квадранта, определение величины перемещения, в направлении каких осей оно должно производиться и т.д.), т.е. подготавливается информация для подпрограмм нижнего уровня (интерполятора, регулятора и т.п.). Перед отработкой кадра выполняется анализ станка на аварийные ситуации подпрограммой SYSSCAN. В случае возникновения аварийной ситуации (ALARM=1) происходит анализ неисправности и анализируется возможность ее устранения, что выполняет подпрограмма ANALYSE, в случае успешного завершения которой управление передается подпрограмме выполнения кадра управляющей программы EXE_КАDR. Данная подпрограмма включает в себя программы интерполяции (линейной и круговой), программы чтения и вычисления положения и скорости исполнительных органов, программы регуляторов и другие программы нижнего уровня.
Ручной режим работы начинается подпрограммой INITHAND, производящей требуемую настройку параметров системы. Далее следует собственно рабочий цикл, начинающийся чтением состояния пульта оператора (RD_КАDR). Проверка корректности введенной команды производится подпрограммой CHECK. В случае, если проверка пройдена успешно, в действие вступает программа SYS_SCAN, затем действия аналогичны действиям, описанным в автоматическом режиме работы
Процедуры основной программы и выполняемые ими действия приведены в таблице 6.1.
Таблица 6.1 – Процедуры головного модуля
| Процедура | Выполняемые действия |
| SYSINIT | Подготовка системы к работе, установка рабочих органов в нулевое положение, сброс блока управления приводами и информационной системы, включение силовых цепей и цепей защиты. |
| RDPRG | Ввод управляющей программы. |
| CHECK | Проверка корректности команд. Трансляция входной программы в формат, используемый при обмене информацией в системе. Формирование массива кадров. |
| RD_KADR | Чтение и анализ кадра: определение вида интерполяции, рабочего квадранта, величин перемещения и скоростей по координатам. Определение технологических функций |
| EXE_KADR | Отработка кадра управляющей программы. Формирование кодов управления, отработка заданных перемещений. |
| HANDINIT | Подготовка системы к работе в ручном режиме |
| AUTOINIT | Подготовка системы к работе в автоматическом режиме |
| SYS_SCAN | Чтение состояния электроавтоматики станка: состояния конечных выключателей, контактов реле защит и силовых контакторов. |
| ANALYSE | Анализ аварийной ситуации, определение возможности продолжения работы станка. |
Дата: 2019-05-29, просмотров: 313.