Введем в систему момент сопротивления. Для этого из неизменяемой части выделим механическую часть двигателя  , Определим значение , которое для дискретной ПФ будет иметь вид :
, Определим значение , которое для дискретной ПФ будет иметь вид :
 .
.
Перед подачей момента сопротивления используем дифференциальное звено с коэффициентом усиления:
 .
.
После подачи момента используем интегрирующее звено. В качестве момента сопротивления подадим номинальный момент двигателя.
В результате получим модель, показанную на рисунке 4.6. График переходного процесса при набросе и снятии нагрузки показан на рисунке 4.7.
Промоделируем ситуацию, когда нагрузка на двигатель будет сразу при его включении (т.е. рабочий инструмент станка изначально нагружен). График такого переходного процесса показан на рисунке 4.8.
Промоделируем ситуацию при ступенчатом увеличении значения момента сопротивления от Мн до 2Мн (рисунок 4.9)
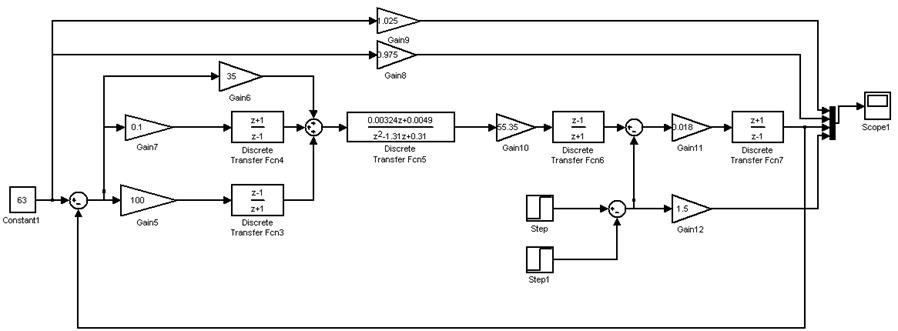
Рисунок 4.6 – Модель системы при моделировании подачи момента сопротивления
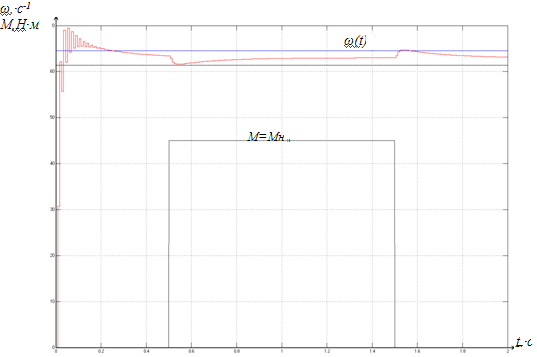
Рисунок 4.7 – График переходного процесса при набросе и снятии нагрузки
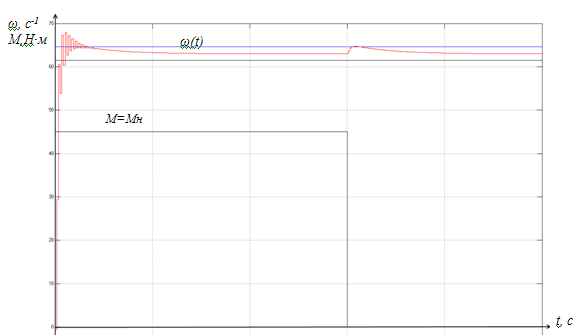
Рисунок 4.8 – График переходного процесса при включении двигателя под нагрузкой
|
|
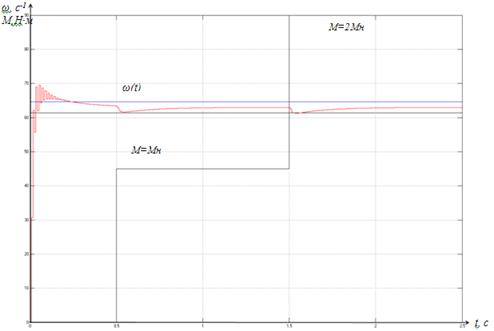
Рисунок 4.9 – График переходного процесса при при ступенчатом увеличении значения момента сопротивления от Мн до 2Мн
5. ПРОЕКТИРОВАНИЕ СРЕДСТВ СОПРЯЖЕНИЯ
Проектирование средств сопряжения с объектом связано с определением конкретных величин, от которых зависят точность и быстродействие системы привода.
Для проектирования средств сопряжения необходимо, прежде всего, определить период дискретности системы управления.
Для электроприводов постоянного тока с тиристорным преобразователем период дискретности зависит от частоты сети  и количества тиристоров
и количества тиристоров  :
:
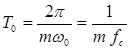 (5.1)
(5.1)
где  Гц – частота питающей сети.
Гц – частота питающей сети.
Для электроприводов постоянного тока с транзисторными ШИП период дискретности зависит от требуемой точности обработки  при движении по круговой траектории радиусом
при движении по круговой траектории радиусом  с угловой скоростью
с угловой скоростью  :
:
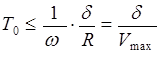 . (5.2)
. (5.2)
В любом случае период дискретности должен удовлетворять условию:
T0 <2/λ3. (5.3)
В приводах переменного тока с частотными преобразователями для обеспечения требуемого диапазона скорости вращения и, соответственно, частоты питающей сети управление преобразователями осуществляется с дискретностью от 2 до 100 мкс.
Квантование по уровню определяет разрядность цифрового представления переменных.
Контроль положения рабочего органа осуществляется ротационными или линейными датчиками, характеристики которых приведены в [1].
Для ввода сигналов датчиков в систему управления предусматриваются специальные средства сопряжения, обеспечивающие передачу кодов в требуемом формате.
При определении разрядности кода положения  рабочего органа необходимо знать цену дискреты
рабочего органа необходимо знать цену дискреты  . Цена дискреты – это точность позиционирования инструмента относительно детали. Обычно она выбирается в диапазоне
. Цена дискреты – это точность позиционирования инструмента относительно детали. Обычно она выбирается в диапазоне  мм.
мм.
Разрешающая способность датчика положения или угла поворота – это количество импульсов на выходе датчика на один шаг измерительной системы. Для поворотных датчиков шагом измерительной системы является один оборот, что соответствует линейному перемещению на шаг винта  . Из этого следует, что для измерения линейного перемещения требуется ротационный датчик с разрешающей способностью:
. Из этого следует, что для измерения линейного перемещения требуется ротационный датчик с разрешающей способностью:
 (имп/об). (5.4)
(имп/об). (5.4)
Так, при шаге винта  = 5 мм и цене дискреты 0,01 мм должен быть установлен датчик
= 5 мм и цене дискреты 0,01 мм должен быть установлен датчик  (имп/об).
(имп/об).
Для станков нормальной (Н) и повышенной (П) точности применяют круговые фотоэлектрические датчики или вращающиеся трансформаторы, для станков высокой точности класса В – линейные оптические системы, например, типа RОD-260.
Необходимая емкость счетчика пути по координате зависит от длины винта  и рассчитывается по соотношению:
и рассчитывается по соотношению:
 ( дискрет). (5.5)
( дискрет). (5.5)
Для представления кода положения  его разрядность
его разрядность  определяется с помощью выражения:
определяется с помощью выражения:
 (разряда). (5.6)
(разряда). (5.6)
Код управления  и код фактической скорости
и код фактической скорости  , вводимые по каналу обратной связи, имеют обычно одинаковую разрядность, которая зависит от диапазона регулирования скорости
, вводимые по каналу обратной связи, имеют обычно одинаковую разрядность, которая зависит от диапазона регулирования скорости  :
:
 . (5.7)
. (5.7)
Регулирование скорости осуществляется в диапазоне Dс = 1000. Тогда для управления скоростью потребуется 10 двоичных разрядов (210=1024).
Для измерения фактической угловой скорости применяют цифровое дифференцирование перемещения или угла поворота. Если датчик угла поворота установлен на двигателе, то код фактической скорости двигателя определяется выражением:
 , (5.8)
, (5.8)
где  – коэффициент передачи канала измерения скорости;
– коэффициент передачи канала измерения скорости;  – разность показаний датчика угла поворота за период дискретности;
– разность показаний датчика угла поворота за период дискретности;  – скорость двигателя в текущем периоде дискретности.
– скорость двигателя в текущем периоде дискретности.
Зная диапазон регулирования скорости  , можно определить число импульсов/оборот, которое должен иметь датчик, чтобы на минимальной скорости за период дискретности
, можно определить число импульсов/оборот, которое должен иметь датчик, чтобы на минимальной скорости за период дискретности  на его выходе был минимум 1 импульс:
на его выходе был минимум 1 импульс:
 (5.9)
(5.9)
При  , необходимо применить датчик с разрешающей способностью:
, необходимо применить датчик с разрешающей способностью:
 имп/об. (5.10)
имп/об. (5.10)
Значит, из справочника для датчика скорости выбираем фотоэлектрические датчики угла поворота фирмы НЕIDЕNНАІ
RОD-260 – для повышенных частот вращения с частотой считывания 1МГц,
Uпит = 5В, габаритные размеры DхL – 92х50 мм;
присоединительный вал Ø10 h6.
Стандартные числа штрихов (импульсный выход): 12500.
Для датчика положения мы выбираем тот же датчик, но для получения 500 имп/об применяем программный делитель с коэффициентом деления 25.
Основой ШИП есть транзисторные преобразователи. Упрощенная схема ШИП представлена на рисунке 5.2. Схема содержит четыре транзисторных ключа ТК 1-ТК4. Питание ШИП осуществляется от источника постоянного тока, шунтированного конденсатором. Существует три способа управления ШИП: симметричный, не симметричный и поочередной. Наиболее простым способом управления ШИП есть симметричный.
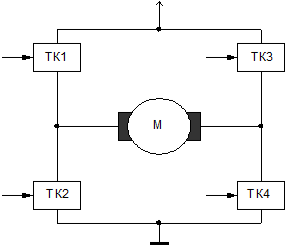
Рисунок 5.2 - Схема транзисторного ШИП
При симметричном способе управления в состоянии переключения находятся все четыре транзисторных ключа моста, а напряжение на выходе ШИП представляет собой знакопеременные импульсы, продолжительность которых регулируется входным сигналом.
В ШИП с симметричным управлением среднее напряжение на выходе ШИП равняется нулю, когда относительное дополнение включения равняется 0,5. Относительное дополнение включения (скважность) - это отношение длины управляющих импульсов к периоду коммутации ШИП. Симметричный способ управления обычно используется в маломощных приводах постоянного тока. Его преимуществом является простота реализации и отсутствие зоны нечувствительности в регулировочной характеристике.
Недостатком ШИП с симметричным управлением - знакопеременное напряжение на нагрузке и повышения пульсации тока в якоре исполнительного двигателя. Стремление исключить этот недостаток и привело к разработке средств, которые обеспечивают однополярное напряжение на выходе ШИП. Этим способом является несимметричное управление ШИП.
В этом случае переключаются транзисторные ключи фазной группы ТК3 и ТК4 (ключе ТК1 и ТК2 при противоположной полярности входного сигнала), транзисторный ключ ТК1 постоянно открыт и насыщен, а ключ ТК2 постоянно закрыт.
Транзисторные ключи ТК3 и ТК4 переключаются в противофазе, обеспечивая протекание тока якоря от противо-ЭДС двигателя. При этом на выходе ШИП формируются знакопостоянные импульсы, и среднее напряжение на выходе равняется нулю, когда относительное дополнение включения одного из нижних транзисторов равняется 0,5.
Недостатком этого способа является то, что верхние транзисторные ключи (ТК1 и ТК2) за током загруженные больше чем нижние. Это можно устранить при поочередном управлении, но поочередный способ управления в реализации значительно более сложный предыдущих двух. Поэтому рациональнее всего остановиться на несимметричном способе управления транзисторными ключами.
При разработке мощных источников электропитания и приводов электродвигателей всегда приходится решать вопросы выбора схемотехники управления затворами силовых транзисторов мостовых и полумостовых инверторов. В этой связи можно выделить три основных положения:
Необходимость обеспечения требуемого пикового тока драйвера для перезаряда входной емкости силового транзистора.
Необходимость обеспечения надежной развязки между верхним и нижним плечами полумоста.
Необходимость обеспечения хорошей гальванической развязки по сигналам управления.
В настоящее время фирмы-производители электронных компонентов предлагают ряд решений, позволяющих в конкретных случаях повысить надежность и упростить схемотехнику управления силовыми ключами.
На рисунке 5.3 приведена схема силового транзисторного ключа.
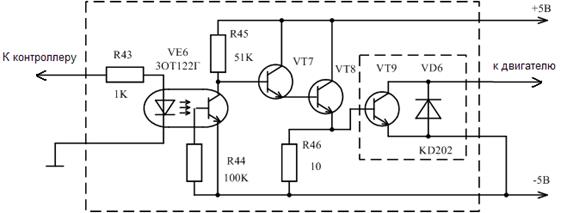
Рисунок 5.3 - Функциональная схема транзисторного ключа
Дата: 2019-05-29, просмотров: 352.