Зміст
1. Теплові процеси в РЕЗ
1.1 Теплообмін
1.2 Передача теплової енергії теплопровідністю (кондукцією)
1.3 Теплопровідність крізь стінку
1.4 Теплопровідність вздовж стінок та стержнів
1.5 Способи збільшення теплопровідності
1.6 Передача теплової енергії конвекцією
1.6.1 Конвективна тепловіддача
1.6.2 Вільна конвекція в необмеженому просторі
1.6.3 Вільна конвекція в обмеженому просторі
1.6.4 Конвективний теплообмін при довільному тиску
1.7 Передача теплової енергії випромінюванням
1.8 Складний теплообмін
1.9 Теплові режими РЕЗ
1.9.1 Нагрівання тіла зовнішнім середовищем
1.9.2 Нагрівання тіла внутрішнім джерелом енергії
1.9.3 Розрахунок температури корпуса та нагрітої зони
1.9.4 Максимальна температура РЕЗ
1.9.5 Температура в довільній точці
1.10 Типові теплові моделі РЕЗ
1.11 Вибір загальної системи охолодження РЕЗ
2. ЕОМ як механічна система
2.1 Динамічна модель та її параметри
2.1.1 Приведення мас
2.1.2 Приведення сил
2.1.3 Приведення пружних параметрів
2.1.4 Приведення параметрів дисипації
2.2 Вільні коливання одномасової системи
2.3 Вимушені коливання при гармонічному збудженні
2.4 Коефіцієнт динамічності
2.5 Зменшення вимушених коливань
2.6 Вимушені коливання при періодичному збудженні
2.7 Коливання елементів РЕА типу балок
2.8 Коливання пластин
2.9 Віброзахист обчислювальної техніки
3. Електромагнітна сумісність радіоелектронних засобів
3.1 Проблеми електромагнітної сумісності
3.2 Джерела, приймачі та зв’язки завад
3.3 Застосування еквівалентних електричних схем
3.4 Приклад розрахунку еквівалентної схеми
3.5 Екранування
3.6 Екранування електростатичного поля
3.7 Магнітостатичне екранування
3.8 Електромагнітне екранування
3.9 Електромагнітна сумісність цифрових вузлів
Висновки
Перелік умовних позначень
Список літератури
Вступ
Конструювання є органічною складовою більш широкого процесу, який пов’язаний із розробкою технічного проекту, виробництвом і експлуатацією виробу. Процес конструювання не можна звести до окремих конструкторських рішень, прикладів та рекомендацій. Дуже важливо мати правильне й змістовне уявлення про загальні закономірності конструювання, його проблеми та перспективи. Тому конструювання обчислювальної техніки (ОТ) розглянуто як прикладну наукову дисципліну, що узагальнює методи аналізу та синтезу конструкцій ОТ.
Теорія конструювання обчислювальної техніки формується на основі вивчення та врахування тих фізичних процесів, які реально впливають на її функціональні показники. В першу чергу, це електричні, електромагнітні, теплові та механічні процеси. Ці різні за своєю фізичною природою процеси певним чином взаємопов’язані між собою. Сучасне проектування ОТ вимагає системного підходу, при якому всі фізичні процеси розглядаються у взаємодії. Такий підхід потребує створення складних фізичних та математичних моделей.
Електрична енергія, яку споживає радіоелектронний засіб (РЕЗ), неминуче перетворюється в теплову. При цьому елементи РЕЗ нагріваються і погіршують свої характеристики. Боротьба з перегрівом особливо актуальна в умовах мініатюризації, що потребує детального аналізу трьох видів теплообміну: теплопровідності, конвекції, випромінювання. В багатьох випадках передача тепла відбувається через плоскі й циліндричні стінки, при цьому важливими є способи збільшення теплопровідності. У випадку складних теплових режимів нормальна робота приладів можлива завдяки використанню систем охолодження.
При певних обставинах на базі пружних елементів в ЕОМ можуть виникати та розвиватись механічні коливання. Для визначення рівня коливань складається відповідна динамічна модель. Динамічна модель – ідеалізований в межах поставленої задачі об’єкт з певними характеристиками у вигляді інерційних, пружних, дисипативних та силових параметрів. Важливим питанням є віброзахист обчислювальної техніки, який реалізується завдяки застосуванню різних видів амортизаторів.
Електромагнітна сумісність – здатність виробів нормально функціонувати поруч з іншими виробами в умовах дії між ними та на них додаткових електромагнітних полів при виготовлені та експлуатації. Тому для надійної роботи приладів важливими є способи зменшення завад, екранування електростатичного, магнітного та електромагнітного поля.
Теплові процеси в РЕЗ
Теплообмін
Електрична енергія, яку споживає РЕЗ, неминуче перетворюється в теплову [1, 2]. При цьому елементи РЕЗ нагріваються і погіршують свої характеристики. Боротьба з перегрівом особливо актуальна в умовах мініатюризації. Існують два принципово різні методи боротьби з перегрівом:
- зменшення споживаної енергії, яка перетворюється в теплову;
- інтенсифікація тепловідведення з РЕЗ у навколишнє середовище.
Для успішного розв’язку проблеми треба вивчити процеси теплообміну.
Теплообмін – це процес переносу теплової енергії із однієї частини середовища в іншу. Важливо, що теплообмін – необоротний процес. Він визначається різницею температур і проходить в напрямку зменшення температури. Як правило, цей процес іде з середини апарату в зовнішнє середовище.
Розрізняють три види теплообміну [1-3]:
· теплопровідність – молекулярний чи електронний процес переносу тепла в суцільному середовищі;
· конвекція – перенесення тепла, пов’язане з макропереміщенням об’ємів рідин та газів;
· випромінювання (радіація) – це явище переносу енергії у вигляді електромагнітних хвиль.
Незалежно від виду теплообміну, тобто незалежно від механізму теплового процесу, його описують за допомогою аналітичного виразу, який має однакову лінійну форму.
Позначимо:
Q – кількість тепла, Дж;
Ф – тепловий потік, Вт.
В такому випадку має місце диференціальна залежність:
 , (1.1)
, (1.1)
де τ – час.
Між різницею температур (перегрівом θ) і тепловим потоком має місце залежність
 , (1.2)
, (1.2)
де R12 – коефіцієнт пропорціональності, який залежить від природи та стану середовища, а також від механізму теплового процесу. В загальному випадку це складна функція, але досить часто R12 - константа. По аналогії з електричними колами R12 називають тепловим опором.
Конвективна тепловіддача
Мова йде про передачу тепла з поверхні твердого тіла в газ або рідину, які переміщуються відносно поверхні. Цей процес суттєво залежить від стану нагрітого середовища. Конвекція завжди супроводжується теплопровідністю
 ,
,
де q- поверхнева густина теплового потоку;
 - теплопровідна складова;
- теплопровідна складова;
 - конвективна складова.
- конвективна складова.
Якщо швидкість переміщення V газу чи рідини відносно поверхні тіла падає до нуля, то  . Якщо ж ця швидкість досягає високих значень, то
. Якщо ж ця швидкість досягає високих значень, то  . У більшості практичних задач .
. У більшості практичних задач .
Процес конвекції формально (математично) зводиться до процесу теплообміну (тіло - рідина). Цей процес називається конвективною тепловіддачею та виражається формулою Ньютона:
 , (1.13)
, (1.13)
де А - площа поверхні тепловіддачі;
 - конвективна теплопровідність,
- конвективна теплопровідність,  ;
;
 - коефіцієнт конвективної тепловіддачі,
- коефіцієнт конвективної тепловіддачі,  .
.
Формула Ньютона виглядає як лінійна функція, але справа в тому, що коефіцієнт конвективної тепловіддачі складним чином суттєво залежить від багатьох теплофізичних та гідродинамічних факторів. Коефіцієнт конвективної тепловіддачі розглянемо як функцію
 , (1.14)
, (1.14)
де  - температура тіла;
- температура тіла;
 - температура середовища;
- температура середовища;
 - коефіцієнт термічного розширення середовища;
- коефіцієнт термічного розширення середовища;
 - теплопровідність середовища;
- теплопровідність середовища;
 - теплоємність середовища;
- теплоємність середовища;
 - коефіцієнт динамічної в’язкості середовища;
- коефіцієнт динамічної в’язкості середовища;
 - густина середовища;
- густина середовища;
 - визначальний розмір тіла;
- визначальний розмір тіла;
 - прискорення земного тяжіння.
- прискорення земного тяжіння.
В залежності від конкретних умов (1.14) може набути досить простого вигляду. Теорія подібності дає ряд критеріїв, які дозволяють класифікувати задачу визначення αK по значеннях цих критеріїв. Формула (1.14) в залежності від конкретних умов набуває декількох характерних форм, кожна з яких значно простіша базової формули.
Складний теплообмін
Незалежно від виду теплообміну використовується одна розрахункова формула:
 . (1.30)
. (1.30)
Індекс m вказує на механізм переносу тепла: при індукції m≡т, при конвективному теплообміні m≡к та m≡в при випромінюванні. Тому в загальному випадку при наявності всіх трьох теплових процесів
 . (1.31)
. (1.31)
Вважаємо, що всі три види теплових процесів протікають паралельно і незалежно.
Теплові режими РЕЗ
Максимальна температура РЕЗ
Дуже важливо знайти саме максимальну температуру нагрітої зони. Припускаємо, що джерела теплової енергії розподілені в нагрітій зоні рівномірно по всьому об’єму. Це припущення дозволяє вважати, що максимальною є температура в центрі нагрітої зони, тобто в центрі паралелепіпеда.
Максимальна температура визначається формулою
 , (1.35)
, (1.35)
де V - об’єм нагрітої зони, V = Lx Ly Lz (рис.1.13);
С - безрозмірний коефіцієнт.
Формулу (1.35) розглянемо спочатку для РЕЗ касетного типу. Нагріта зона апаратів цього типу вважається анізотропним тілом з різними теплопровідностями вздовж координатних осей: λx, λy, λz.
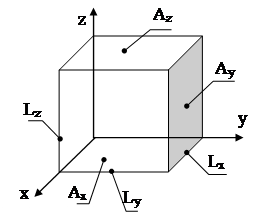 |
Рис.1.13. Нагріта зона
Значення Lmin та λmin визначаються особливим чином. Дамо алгоритм пошуку Lmin, який є одним з розмірів L1, L2 чи h.
1. Нехай Lmin=Lx. Тоді  ,
,  . Якщо при цьому виконується умова Lx<L1 та Lx<L2, то дійсно Lmin=Lx, а λmin= λx. Якщо ця умова не виконується, то пошук продовжується.
. Якщо при цьому виконується умова Lx<L1 та Lx<L2, то дійсно Lmin=Lx, а λmin= λx. Якщо ця умова не виконується, то пошук продовжується.
2. Нехай тепер Lmin=Ly. Тоді  ,
,  . Якщо при цьому виконується умова Ly<L1 та Ly<L2, то дійсно Lmin=Ly, а λmin= λy. Якщо ж умова знову не виконується, то Lmin=Lz і λmin= λz.
. Якщо при цьому виконується умова Ly<L1 та Ly<L2, то дійсно Lmin=Ly, а λmin= λy. Якщо ж умова знову не виконується, то Lmin=Lz і λmin= λz.
Тепер можна визначити й коефіцієнт С, який є функцією
 .
.
Цю функцію реалізовано у вигляді системи графіків (рис.1.14). Визначивши значення Lmin/L1 та Lmin/L2, знайдемо на відповідній кривій точку Lmin/L2 з абсцисою Lmin/L1. Ордината цієї точки є значенням коефіцієнта С.
Задача визначення коефіцієнта С для РЕЗ з горизонтальним шассі набагато простіша. Нагріта зона в цьому випадку ізотропне тіло, у якого λx=λy=λz=λ=λmin. Розмір Lmin визначається як мінімальний з трьох розмірів {Lx, Ly, Lz}. Значення С знаходимо за допомогою графіків (рис.1.14).
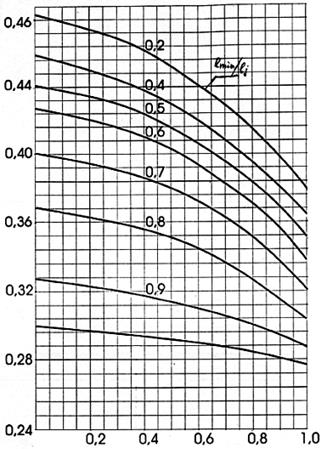
Рис.1.14. Графік для визначення коефіцієнта С
Типові теплові моделі РЕЗ
Теплові процеси в РЕЗ досить складні і тому піддаються лише наближеному математичному опису. Теплова модель повинна бути якомога простішою, але при цьому вона повинна відображати найбільш суттєві теплові властивості конструкції РЕЗ. Велику різноманітність теплових моделей можна звести до двох типів:
1) моделі, що мають виділену нагріту зону, поверхня якої є ізотерма. Такі моделі відповідають або апаратам з відносно великими деталями на шасі (рис. 1.16, а), або апаратам з великим проміжком (рис. 1.16, б).
2) моделі, весь об’єм яких є умовна теплова зона. Відповідають апаратам з щільним компонуванням. Сукупність касет ідеалізується як однорідне тіло з теплопровідностями  (рис. 1.16, в).
(рис. 1.16, в).
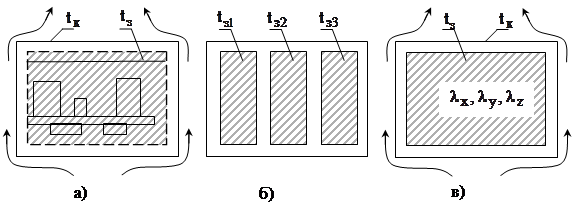
Рис. 1.16. Типи теплових моделей
На базі цих двох основних типів моделей описуються певні теплові процеси в залежності від того, яка система забезпечення теплового режиму використовується.
Нормальний тепловий режим РЕЗ забезпечується спеціальними пристроями – системами забезпечення теплового режиму (СЗТР). СЗТР підрозділяються на дві великі групи – системи охолодження (СО) та системи термостабілізації (СТ). Системи охолодження можуть мати загальне або локальне призначення. Розглянемо способи охолодження РЕЗ, що визначають основні типи СО [1-8].
Вільне повітряне охолодження. Цей спосіб не потребує спеціальних пристроїв, найбільш простий, економний і надійний, бо не потребує додаткової енергії. Розрізняють дві основні схеми вільного повітряного охолодження РЕЗ: герметичні РЕЗ ( рис. 1.16) та перфоровані РЕЗ (рис. 1.17).
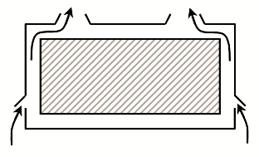

а) б)
Рис. 1.17 Схема повітряного охолодження
Примусове повітряне охолодження. Цей спосіб одержав найбільше розповсюдження. Це пояснюється багатьма причинами, найважливіші з яких – доступний і дешевий теплоносій, відносна простота конструкції вентилятора і повітропроводів. Недоліками систем примусового повітряного охолодження є наявність акустичних шумів і вібрацій, зниження надійності виробу, збільшення його об’єму, маси, додаткової енергії на охолодження.
На практиці застосовують три схеми примусового повітряного охолодження: приточна (рис. 1.18, а), витяжна (рис. 1.18, б) та приточно-витяжна (рис. 1.18, в).

Рис. 1.18 Система примусового повітряного охолодження
Існує багато конструктивних рішень примусового повітряного охолодження. Широко застосовуються схеми локального повітряного охолодження. На рис. 1.19 зображена схема локального охолодження потужних інтегральних схем (ІС), що встановлені на платі.
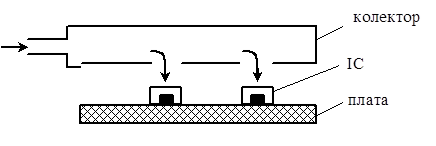
Рис. 1.19. Локальне примусове повітряне охолодження
На рис. 1.20 зображена конструкція касетного примусового повітряного охолодження. Система має повітровід, з обох сторін якого приклеєні друковані вузли з інтегральними схемами. Тепловий потік від корпуса ІС і стінки повітроводу переноситься повітрям. Один із способів інтенсифікації конвективної тепловіддачі в умовах примусового повітряного охолодження – турбулізації повітряного потоку з допомогою спеціальних пристроїв.
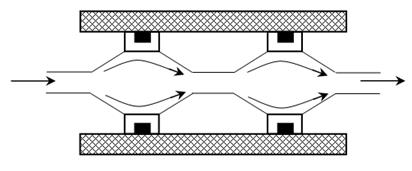
Рис.1.20. Касетне примусове повітряне охолодження
Кондуктивні системи охолодження. Кондукція як механізм переносу теплової енергії відіграє важливу роль в усіх схемах охолодження. В кондуктивних СО теплопровідність є основним механізмом передачі теплової енергії від джерела до теплообмінних пристроїв. Приклад використання кондуктивних теплопотоків показаний на рис. 1.21.

Рис. 1.21. Кондуктивне охолодження ІС
Рідинні системи охолодження. Рідина може бути більш ефективним теплоносієм, ніж повітря. Рідинні СО, як і повітряні, конструктивно різноманітні і багато в чому подібні.
Випарні системи охолодження. Рідини, що випаровуються в спеціальних системах, забезпечують найбільш інтенсивне охолодження РЕЗ. Але цей спосіб конструктивно найбільш складний і дорогий.
Теплообмінні пристрої. Це пристрої, в яких теплова енергія передається від одного теплоносія до другого через стінку, яка їх розділяє. Найбільш розповсюдженим є кожухотрубні (рис. 1.22, а) та компактні теплообмінники (рис. 1.22, б). В якості теплоносія в них можуть застосовуватись різні комбінації газів, парів та рідин.
 |  |
а) б)
Рис. 1.22. Теплообмінники
Радіатори. Радіатор є засобом підвищення тепловіддачі з елемента, що виділяє тепло. Кількість тепла, що віддається в цьому випадку в середовище зростає найчастіше за рахунок збільшення поверхні теплообміну. Застосовуються різноманітні конструкції радіаторів: в вигляді пластини, ребер, штирів тощо. Різноманітність конструкцій радіаторів зумовлена як різними вимогами до них, так і різноманітністю умов їх застосування.
Ребристий радіатор (рис. 1.23) має найбільш розширену поверхню тепловіддачі. Ребра мають певну форму і крок розташування на основі. Розрахунок таких радіаторів пов’язаний в першу чергу з вибором кількості, висоти та кроку розташування ребер і наводиться в довідниках.

Рис. 1.23. Ребристий радіатор
ЕОМ як механічна система
Приведення мас
Кінетична енергія матеріальної точки масою mi, що рухається зі швидкістю vi, дорівнює  . Кінетична енергія є скалярною величиною і кінетична енергія системи дорівнює сумі кінетичних енергій складових елементів. З точки зору незмінності закону руху складної системи її масу можна перерозподіляти при умові незмінності кінетичної енергії системи в будь-який момент часу:
. Кінетична енергія є скалярною величиною і кінетична енергія системи дорівнює сумі кінетичних енергій складових елементів. З точки зору незмінності закону руху складної системи її масу можна перерозподіляти при умові незмінності кінетичної енергії системи в будь-який момент часу:
 .
.
Звідки приведена маса
 , (2.1)
, (2.1)
де mi – маса і-тої точки;
vi – швидкість і-тої точки;
 – узагальнена швидкість (швидкість точки приведення).
– узагальнена швидкість (швидкість точки приведення).
Голономними називають системи, в яких зв’язки обмежують лише положення елементів системи і не обмежують величини їх швидкості. В механіці встановлено, що в голономних системах відношення vi / не залежить від часу, а залежить від положення системи, тобто від значення q. Отже m = m(q).
Приведення сил
З точки зору незмінності закону руху механічної системи дію однієї системи сил можна замінити дією іншої системи сил, якщо потужнoсті цих систем сил будуть однакові у будь-який момент часу. При дії сили  на тіло в точці і вектори та
на тіло в точці і вектори та  утворюють деякий кут
утворюють деякий кут  (рис 2.2). Потужність сили
(рис 2.2). Потужність сили

Ni = 
 =
=  cos αi.
cos αi.
Ni > 0, якщо 0  αi < π/2,
αi < π/2,
Ni = 0, якщо αi = π/2,
Ni < 0, якщо π/2 αi < π.
Рис. 2.2. Потужність сили
При дії моменту сил Mj на тіло j (рис. 2.3) потужність моментів сил визначається формулою:
 ,
,
де  - кутова швидкість тіла j;
- кутова швидкість тіла j;
Ni < 0, якщо Mj і  направлені протилежно;
направлені протилежно;
Ni > 0, якщо Mj і  співпадають за напрямом;
співпадають за напрямом;

Рис.2.3. Потужність моменту сил
Потужність є алгебраїчною величиною, тобто скалярною величиною, і потужність системи сил дорівнюють сумі потужностей кожної складової сили. Умова незмінності потужності в будь-який момент часу при заміні діючої системи сил приведеною силою має вигляд:
 .
.
Звідси знаходимо приведену силу:
 .
.
Коефіцієнт динамічності
Рівняння (2.17) на практиці застосовують в іншому вигляді.
Введемо поняття коефіцієнта динамічності:
 , (2.18)
, (2.18)
де Ао – деформація пружного елементу від дії сталої сили Fo. Коефіцієнт динамічності – безрозмірна величина.
Із сказаного раніше випливає, що
 . (2.19)
. (2.19)
Введемо також такі безрозмірні коефіцієнти:
 , (2.20)
, (2.20)
 . (2.21)
. (2.21)
Тоді підставляючи (2.17) та (2.19) в рівняння (2.18) та враховуючи (2.20) і (2.21), одержимо
 . (2.22)
. (2.22)
В останній формулі всі величини безрозмірні.
Типовий графік функції (2.22) зображено на рис.2.10.


Рис. 2.10. Графік функції 
Допустиме значення  коефіцієнта динамічності визначає резонансну зону
коефіцієнта динамічності визначає резонансну зону  , дорезонансну зону
, дорезонансну зону  та зарезонансну зону
та зарезонансну зону  .
.
При  коефіцієнт динамічності
коефіцієнт динамічності  . Тобто при зростанні Z в зарезонансній зоні система взагалі не реагує на збудження.
. Тобто при зростанні Z в зарезонансній зоні система взагалі не реагує на збудження.
Вплив параметра δ проявляється лише в резонансній зоні. Максимальне значення функція приймає при деякому значення Z*.
 . (2.23)
. (2.23)
Коливання пластин
Це особливо важливий випадок, бо стосується монтажних плат, шассі та інших плоских тіл.
Розглянемо прямокутну пластину постійної товщини з пружного однорідного ізотропного матеріалу.
Теорія дає загальну розрахункову формулу
 , Гц, (2.30)
, Гц, (2.30)
деа – довжина пластини в см,
h – товщина пластини в см,
ρ – густина матеріалу, з якого зроблені пластини,
D =  - циліндрична жорсткість пластини,
- циліндрична жорсткість пластини,
 - коефіцієнт Пуассона,
- коефіцієнт Пуассона,
 - коефіцієнт, що залежить від способу закріплення країв пластини.
- коефіцієнт, що залежить від способу закріплення країв пластини.
Формулу (2.30) перетворюють до вигляду зручного в користуванні. Для цього вводять параметр
С =  , (2.31)
, (2.31)
Тоді (2.30) прийме вигляд
f =  (2.32)
(2.32)
де а і h задаються в см.
Базовим приймають випадок, коли пластина виготовлена зі сталі (Ес = 2,1*1011  ).
).
Для врахування параметрів матеріалу пластини (Е,  ) вводять коефіцієнт
) вводять коефіцієнт
КМ =  . (2.33)
. (2.33)
Для врахування впливу підвісних елементів на платі вводять коефіцієнт
КВ =  , (2.34)
, (2.34)
де М – маса елементів;
mпл – маса пластини;
Тоді (2.32) набуває вигляду:
 . (2.35)
. (2.35)
Порівняно з (2.32) змінився зміст коефіцієнта С, який вже вибирається із спеціальної таблиці в залежності від схеми закріплення країв пластини та співвідношення  (рис. 2.13).
(рис. 2.13).
 | |||
 | |||
а) б)
 Рис. 2.13. Схеми закріплення краю пластини
Рис. 2.13. Схеми закріплення краю пластини
Кожний край пластини має три варіанти закріплення: край може бути защемлений (рис. 2.13, а), вільно підпертий знизу (рис. 2.13, б), або взагалі вільним. Три варіанти закріплення кожної сторони породжують 20 схем закріплення плат. Шляхом теоретичних розрахунків та експериментальних досліджень побудовані спеціальні таблиці значень коефіцієнта С в залежності від варіанта закріплення пластини та в залежності від відношення  .
.
Частота власних коливань плати може відповідати резонансній зоні. Вихід з резонансної зони здійснюється за рахунок зміни товщини пластини h або значення коефіцієнта С. Оскільки змінювати відношення можна лише в деяких випадках, то практичне значення має зміна С за рахунок зміни закріплення країв пластини. Зміну товщини чи схеми кріплення плати можна здійснити практично завжди.
Екранування
Екранування здійснює захист приймача від дії електричних, магнітних та електромагнітних полів джерела з допомогою металевих екранів. Розрізняють зовнішнє та внутрішнє екранування. При зовнішньому екрануванні електричні кола з відносно низькими енергетичними рівнями захищають від впливу зовнішніх відносно них полів завад. З допомогою екрану навколо приймача створюється частина простору, в якому ослаблена дія полів завад. При внутрішньому екрануванні обмежується простір навколо джерела завад і тим самим обмежується поширення енергії від власного внутрішнього поля об’єкту, наприклад поля вихідного каскаду підсилювача проміжної частоти.
Ефективне екранування потребує врахування багатьох і різноманітних обставин, моделі яких повинні бути представлені фізично переконливо та математично просто.
Не зважаючи на те, що практично дуже важко виділити суто електричне, магнітне чи електромагнітне поле, з методичної точки зору зробити це дуже важливо. Бо саме характер поля завад визначає якісно той чи інший спосіб екранування. Відповідно розрізняють електростатичне, магнітостатичне та електромагнітне екранування.
Дія екрана залежно від його взаємодії з полем завади може грунтуватися на одному з трьох принципів: відбиття від екрана, шунтування та поглинання екраном електромагнітних хвиль. Відповідні екрани називають відбивними (електромагнітними), шунтувальними (магнітостатичними) і поглинальними (електростатичними та електромагнітними).
Ефективність екранування S визначається відношенням напруг, струмів, напруженостей електричного та магнітного полів в області екранування при відсутності та наявності екрана:



 .(3.8)
.(3.8)
В техніці провідникового зв’язку ефективність екранування прийнято оцінювати в неперах:
 (3.9)
(3.9)
В радіотехніці екранне затухання оцінюють в децибелах:
 (3.10)
(3.10)
При цьому В=0,115А або А=8,7В.
Магнітостатичне екранування
Магнітостатичне екранування застосовують для захисту від постійних та слабозмінних магнітних полів з частотою від 0 до 3000 Гц. Екран виготовляють із феромагнітних матеріалів (пермалой, сталь, ферит) з великою відносною магнітною проникністю  . Товщина екрана з металу складає 0,5...1,5 мм. При наявності такого екрана силові лінії магнітного поля Н проходять в основному по його стінках (рис. 3.11), які мають малий магнітний опір в порівняно з опором простору навколо екрана (ефект поглинання). Ефективність екранування таких полів залежить від магнітної проникності екрана і його товщини, а також від наявності стиків і швів, розміщених перпендикулярно до силових ліній магнітного поля. Цей вид екранування називається магнітним шунтуванням.
. Товщина екрана з металу складає 0,5...1,5 мм. При наявності такого екрана силові лінії магнітного поля Н проходять в основному по його стінках (рис. 3.11), які мають малий магнітний опір в порівняно з опором простору навколо екрана (ефект поглинання). Ефективність екранування таких полів залежить від магнітної проникності екрана і його товщини, а також від наявності стиків і швів, розміщених перпендикулярно до силових ліній магнітного поля. Цей вид екранування називається магнітним шунтуванням.
У випадку  ефективність екранування для циліндричного екрана (рис. 3.11, а):
ефективність екранування для циліндричного екрана (рис. 3.11, а):
 , (3.15)
, (3.15)
а для екрана у формі паралелепіпеда (рис. 3.11, б):
 .(3.16)
.(3.16)
 |  |
а) б)
Рис.3.11. Схема дії низькочастотного екрану:
а – циліндрична форма; б – форма паралелепіпеда
У цілому ефективність магнітостатичних екранів невелика і практично однакова у всьому діапазоні частот. Так екран, виготовлений зі спеціального сплаву “Армко”, у якого  , при радіусі 0,4 м і товщині екрана 0,01 м забезпечує ефективність 31,5 дБ. Щоб забезпечити дуже високу ефективність екранування, використовують кратне екранування, розташовуючи один екран в середині іншого.
, при радіусі 0,4 м і товщині екрана 0,01 м забезпечує ефективність 31,5 дБ. Щоб забезпечити дуже високу ефективність екранування, використовують кратне екранування, розташовуючи один екран в середині іншого.
Електромагнітне екранування
Електромагнітне екранування застосовують на частотах більших 3000 Гц. Екрани виготовляють із немагнітних і феромагнітних матеріалів. Спрощено суть екранування зводиться до того, що під дією джерела електромагнітного поля на стороні екрана, що обернена до джерела, виникають заряди, а в його стінках-струми, які утворюють в зовнішньому просторі поля, що по напруженості близькі полю джерела, а по напрямку – протилежні йому (рис. 3.12). У результаті в середині екрана відбувається взаємна компенсація полів, а зовні його – витіснення зовнішнього поля полями вихрових струмів (ефект відбиття). Відбувається поглинання полів за рахунок втрат на виділення тепла при протіканні вихрових струмів по стінках екрану та на перемагнічування, якщо екран виконаний з феромагнітного матеріалу. Хоча сталь на високих частотах дає більший екрануючий ефект, ніж немагнітні матеріали, треба враховувати, що стальний екран може викликати значні втрати через свій питомий опір та гістерезис, що призводить до підвищення температури.

а) б) в)
Рис.3.12. Схема дії високочастотного екрана:
а – зовнішнє поле; б – поле вихрових струмів; в – сумарне поле
Щільність вихрових струмів у металевому екрані зменшується від поверхні в його глибину. Це зменшення тим більше, чим вища частота поля і чим більший питомий опір матеріалу екрана. На низьких частотах, коли товщина екрана менша глибини проникнення, поверхневий ефект можна не враховувати.
При виборі матеріалу і товщини екрана треба враховувати не тільки електричні властивості матеріалу, а й його механічну міцність, корозійну стійкість, зручність виготовлення, забезпечення надійного контакту з шиною нульового потенціалу, тепловідвід тощо.
У конструкціях екранів небажані щілини і отвори, інакше енергія, яка проникає в середину, викличе збудження струмів витоку на внутрішній стороні екрана.
Висновки
Конструювання обчислювальної техніки описано як складова більш широкого процесу, пов’язаного із розробкою технічного проекту, виробництвом і експлуатацією виробу. Оскільки процес конструювання не можна звести до окремих конструкторських рішень, прикладів та рекомендацій, тому велику увагу приділено створенню у студентів правильного й змістовного уявлення про загальні закономірності конструювання, його проблеми та перспективи.
Сучасне проектування ОТ вимагає системного підходу, при якому всі фізичні процеси розглядаються у взаємодії. Найбільше впливають на функціональні показники обчислювальної техніки електричні, електромагнітні, теплові та механічні процеси. Врахування взаємозв’язку між процесами можливе завдяки побудові фізичних і математичних моделей пристроїв, що потребує широкого використання комп’ютерної техніки.
При розгляді теплових процесів описано три види теплообміну: теплопровідність, конвекцію, випромінювання. Розглянуто передачу теплової енергії через плоскі й циліндричні стінки, способи збільшення теплопровідності. Описано теплові режими РЕЗ при нагріванні тіла внутрішнім і зовнішнім середовищем, методику розрахунку температур в різних зонах приладу. Розглянуто системи охолодження РЕЗ, зокрема вільне і примусове повітряне охолодження, вільне і примусове рідинне охолодження.
Механічні процеси суттєво впливають на надійність роботи РЕЗ, особливо небезпечними є механічні коливання на базі пружних елементів. Рівень коливань визначається за допомогою відповідної динамічної моделі, яка враховує інерційні, пружні, дисипативні та силові параметрів. Динамічну модель досить часто вдається спростити за рахунок приведення мас, сил, пружних параметрів і параметрів дисипації. Розглянуто вільні та вимушені коливання одномасової системи, віброзахист обчислювальної техніки, явище резонансу, види амортизаторів та схеми їх розташування.
Врахування електромагнітної сумісності є необхідним для забезпечення нормального функціонування виробів поруч з іншими виробами в умовах дії між ними та на них додаткових електромагнітних полів при виготовлені та експлуатації. Розглянуто джерела і приймачі завад, способи екранування електростатичного, магнітного та електромагнітного полів.
Перелік умовних позначень
ВЧ – високі частоти
ДЗ - джерела завад
ДП - друкована плата
ЗЗ - зв’язки завад
ІС – інтегральна схема
НЧ – низькі частоти
ОТ – обчислювальна техніка
ПЗ - приймачі завад
ПЧ – проміжні частоти
РЕЗ - радіоелектронний засіб
СЗТР - системами забезпечення теплового режиму
СО - системи охолодження
СТ - системи термостабілізації
ЦЖ - центр жорстокості
ЦМ - центр мас
Список літератури
1. Домнич В.И., Зинковский Ю.Ф. Конструирование РЭС. Оценка и обеспечение тепловых режимов. – К.: УМК ВО, 1990. – 240 с.
2. Дульнев Г.Н. Тепло- и массообмен в радиоэлектронной аппаратуре. – М.: Высшая школа, 1984. – 247 с.
3. Ненашев А.П. Конструирование радиоэлектронных средств. – М.: Высшая школа, 1990. – 432 с.
4. Справочник конструктора РЭА. Общие принципы конструирования / Под ред. Р.Г.Варламова. – М.: Сов. радио, 1980. – 480 с.
5. Фролов А.Д. Теоретические основы конструирования и надежности РЭА. – М.: Высшая школа, 1970. – 485 с.
6. Зелик А.Є. Програма, методичні вказівки і контрольне завдання з курсу „Основи конструювання і технології РЕЗ”. – Чернівці: Рута, 1994. – 47 с.
7. Зелик А.Є. Основи конструювання і технології радіоелектронних засобів. Навч. посібник до лаб. практикуму. – Чернівці: Рута, 1994. – 82 с.
8. Мюллер Скотт. Модернизация и ремонт ПК. - 12-е изд. - М.: Вильямс, 2001. – 1162 с.
9. Суровцев Ю.А. Амортизация радиоэлектронной аппаратуры. – М.: Сов. радио, 1974. – 160 с.
10. Барнс Д. Электронное конструирование: Методы борьбы с помехами. – М.: Мир, 1990. – 237 с.
11. Таненбаум Э. Архитектура компьютера. - 4-е изд. – СПб.: Питер, 2003. – 698 с.
12. Бабич М.П., Жуков І.А. Комп’ютерна схемотехніка: Навчальний посібник. – К.: МК-Прес, 2004. – 412 с.
13. Бройдо В. Л., Ильина О. П. Архитектура ЭВМ и систем: Учебник для вузов. – М.: Питер, 2005. – 720 с.
14. Цилькер Б.Я., Орлов С.А. Организация ЭВМ и систем: Учебник для вузов. - М.: Питер, 2005. – 672 с.
Зміст
1. Теплові процеси в РЕЗ
1.1 Теплообмін
1.2 Передача теплової енергії теплопровідністю (кондукцією)
1.3 Теплопровідність крізь стінку
1.4 Теплопровідність вздовж стінок та стержнів
1.5 Способи збільшення теплопровідності
1.6 Передача теплової енергії конвекцією
1.6.1 Конвективна тепловіддача
1.6.2 Вільна конвекція в необмеженому просторі
1.6.3 Вільна конвекція в обмеженому просторі
1.6.4 Конвективний теплообмін при довільному тиску
1.7 Передача теплової енергії випромінюванням
1.8 Складний теплообмін
1.9 Теплові режими РЕЗ
1.9.1 Нагрівання тіла зовнішнім середовищем
1.9.2 Нагрівання тіла внутрішнім джерелом енергії
1.9.3 Розрахунок температури корпуса та нагрітої зони
1.9.4 Максимальна температура РЕЗ
1.9.5 Температура в довільній точці
1.10 Типові теплові моделі РЕЗ
1.11 Вибір загальної системи охолодження РЕЗ
2. ЕОМ як механічна система
2.1 Динамічна модель та її параметри
2.1.1 Приведення мас
2.1.2 Приведення сил
2.1.3 Приведення пружних параметрів
2.1.4 Приведення параметрів дисипації
2.2 Вільні коливання одномасової системи
2.3 Вимушені коливання при гармонічному збудженні
2.4 Коефіцієнт динамічності
2.5 Зменшення вимушених коливань
2.6 Вимушені коливання при періодичному збудженні
2.7 Коливання елементів РЕА типу балок
2.8 Коливання пластин
2.9 Віброзахист обчислювальної техніки
3. Електромагнітна сумісність радіоелектронних засобів
3.1 Проблеми електромагнітної сумісності
3.2 Джерела, приймачі та зв’язки завад
3.3 Застосування еквівалентних електричних схем
3.4 Приклад розрахунку еквівалентної схеми
3.5 Екранування
3.6 Екранування електростатичного поля
3.7 Магнітостатичне екранування
3.8 Електромагнітне екранування
3.9 Електромагнітна сумісність цифрових вузлів
Висновки
Перелік умовних позначень
Список літератури
Вступ
Конструювання є органічною складовою більш широкого процесу, який пов’язаний із розробкою технічного проекту, виробництвом і експлуатацією виробу. Процес конструювання не можна звести до окремих конструкторських рішень, прикладів та рекомендацій. Дуже важливо мати правильне й змістовне уявлення про загальні закономірності конструювання, його проблеми та перспективи. Тому конструювання обчислювальної техніки (ОТ) розглянуто як прикладну наукову дисципліну, що узагальнює методи аналізу та синтезу конструкцій ОТ.
Теорія конструювання обчислювальної техніки формується на основі вивчення та врахування тих фізичних процесів, які реально впливають на її функціональні показники. В першу чергу, це електричні, електромагнітні, теплові та механічні процеси. Ці різні за своєю фізичною природою процеси певним чином взаємопов’язані між собою. Сучасне проектування ОТ вимагає системного підходу, при якому всі фізичні процеси розглядаються у взаємодії. Такий підхід потребує створення складних фізичних та математичних моделей.
Електрична енергія, яку споживає радіоелектронний засіб (РЕЗ), неминуче перетворюється в теплову. При цьому елементи РЕЗ нагріваються і погіршують свої характеристики. Боротьба з перегрівом особливо актуальна в умовах мініатюризації, що потребує детального аналізу трьох видів теплообміну: теплопровідності, конвекції, випромінювання. В багатьох випадках передача тепла відбувається через плоскі й циліндричні стінки, при цьому важливими є способи збільшення теплопровідності. У випадку складних теплових режимів нормальна робота приладів можлива завдяки використанню систем охолодження.
При певних обставинах на базі пружних елементів в ЕОМ можуть виникати та розвиватись механічні коливання. Для визначення рівня коливань складається відповідна динамічна модель. Динамічна модель – ідеалізований в межах поставленої задачі об’єкт з певними характеристиками у вигляді інерційних, пружних, дисипативних та силових параметрів. Важливим питанням є віброзахист обчислювальної техніки, який реалізується завдяки застосуванню різних видів амортизаторів.
Електромагнітна сумісність – здатність виробів нормально функціонувати поруч з іншими виробами в умовах дії між ними та на них додаткових електромагнітних полів при виготовлені та експлуатації. Тому для надійної роботи приладів важливими є способи зменшення завад, екранування електростатичного, магнітного та електромагнітного поля.
Теплові процеси в РЕЗ
Теплообмін
Електрична енергія, яку споживає РЕЗ, неминуче перетворюється в теплову [1, 2]. При цьому елементи РЕЗ нагріваються і погіршують свої характеристики. Боротьба з перегрівом особливо актуальна в умовах мініатюризації. Існують два принципово різні методи боротьби з перегрівом:
- зменшення споживаної енергії, яка перетворюється в теплову;
- інтенсифікація тепловідведення з РЕЗ у навколишнє середовище.
Для успішного розв’язку проблеми треба вивчити процеси теплообміну.
Теплообмін – це процес переносу теплової енергії із однієї частини середовища в іншу. Важливо, що теплообмін – необоротний процес. Він визначається різницею температур і проходить в напрямку зменшення температури. Як правило, цей процес іде з середини апарату в зовнішнє середовище.
Розрізняють три види теплообміну [1-3]:
· теплопровідність – молекулярний чи електронний процес переносу тепла в суцільному середовищі;
· конвекція – перенесення тепла, пов’язане з макропереміщенням об’ємів рідин та газів;
· випромінювання (радіація) – це явище переносу енергії у вигляді електромагнітних хвиль.
Незалежно від виду теплообміну, тобто незалежно від механізму теплового процесу, його описують за допомогою аналітичного виразу, який має однакову лінійну форму.
Позначимо:
Q – кількість тепла, Дж;
Ф – тепловий потік, Вт.
В такому випадку має місце диференціальна залежність:
, (1.1)
де τ – час.
Між різницею температур (перегрівом θ) і тепловим потоком має місце залежність
, (1.2)
де R12 – коефіцієнт пропорціональності, який залежить від природи та стану середовища, а також від механізму теплового процесу. В загальному випадку це складна функція, але досить часто R12 - константа. По аналогії з електричними колами R12 називають тепловим опором.
Передача теплової енергії теплопровідністю (кондукцією)
Мова йде про передачу тепла в твердих тілах, нерухомих рідинах і газах, коли температура їх окремих ділянок різна. На рис.1.1. зображені ізотермічні поверхні та лінії теплового потоку.
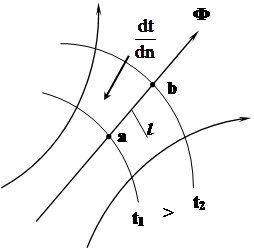 |
Рис.1.1. Ізотермічні поверхні та лінії теплового потоку
Основним законом теплопровідності є закон Фур’є:
 , (1.3)
, (1.3)
де q – поверхнева густина теплового потоку,  ;
;
 - температурний градієнт,
- температурний градієнт,  ;
;  - теплопровідність,
- теплопровідність,  .
.
У диференціальній формі зв’язок між тепловим потоком і поверхневою густиною теплового потоку має вигляд
 , (1.4)
, (1.4)
де dА – елементарна площа ізотермічної поверхні, через яку проходить тепловий потік.
Якщо тепловий потік однорідний (q=const), то
 . (1.5)
. (1.5)
Виведемо формулу для визначення теплового опору, якщо тепловий потік однорідний. З (1.3) та (1.5) слідує, що
 .
.
Враховуючи останнє рівняння, з формули (1.2) одержимо:
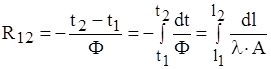 .
.
Дуже часто  . Тоді це рівняння прийме вигляд:
. Тоді це рівняння прийме вигляд:
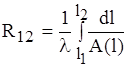 . (1.6)
. (1.6)
З допомогою формули (1.6), виходячи з геометричних особливостей тіла та знаючи коефіцієнт теплопровідності матеріалу λ, можемо визначити тепловий опір ділянки. Знаючи тепловий опір R12 та перегрів θ12, із формули (1.2) одержуємо робочу формулу для визначення теплового потоку на заданій ділянці:
 , (1.7)
, (1.7)
де  - тепловий опір ділянки,
- тепловий опір ділянки,  ;
;
 - теплова провідність ділянки,
- теплова провідність ділянки,  ;
;  ;
;
 - перепад температур (перегрів).
- перепад температур (перегрів).
Дата: 2019-05-29, просмотров: 404.