В машиностроении применяют асинхронные электродвигатели трехфазного тока с короткозамкнутым ротором, которые непосредственно включаются в сеть. Их преимущества: простота конструкции, сравнительно низкая стоимость, простота обслуживания и надежность. Недостатки: меньшие КПД и cos  относительно синхронных электродвигателей; ограниченная возможность регулирования по сравнению с электродвигателями постоянного тока и асинхронными электродвигателями с фазовым ротором, имеющих контакты для включения реостата в цепь ротора.
относительно синхронных электродвигателей; ограниченная возможность регулирования по сравнению с электродвигателями постоянного тока и асинхронными электродвигателями с фазовым ротором, имеющих контакты для включения реостата в цепь ротора.
Синхронная частота вращения соответствует холостому ходу. Под нагрузкой частота вращения электродвигателя уменьшается.
Номинальному (паспортному) режиму эксплуатации электродвигателя соответствует номинальная частота n НОМ и номинальная мощность РНОМ. В этом режиме электродвигатель работает длительное время без перегрева и КПД близок к максимальному. Момент, соответствующий PНОМ, является номинальным – ТНОМ.
В каталоге указывается также отношение ТМАХ /ТНОМ, Т ПУСК/TНОМ. При пуске (n = 0) двигатель развивает момент T ПУСК. В процессе разгона электродвигателя вращающий момент первоначально возрастает до TMAX (при nKP), а затем снижается до момента T НОМ (при n НОМ). Участок характеристики от Т = 0 (холостой ход) до T МАХ близок к прямолинейному, т.е. момент в указанных пределах пропорционален скольжению, однако благодаря «жесткости» механической характеристики значительное изменение нагрузки вызывает несущественное изменение частоты вращения.
В каталоге указывается номинальная частота вращения n НОМ, мин-1, принимаемая за расчетную, например, при определении общего передаточного отношения механизма. Если электродвигатель работает при установившемся режиме (n НОМ и T НОМ), а затем подвергается перегрузке, его частота вращения падает. При этом должно быть обеспечено даже для кратковременного момента перегрузки T ПУСК  T МАХ. Поэтому частота вращения, соответствующая T МАХ , является критической пКР. Следовательно, при выборе электродвигателя необходимо согласовать его характеристику с режимом нагрузки механизма. Например, для конвейеров указывается характер нагрузки и отношение (ТПУСК / ТНОМ)
T МАХ. Поэтому частота вращения, соответствующая T МАХ , является критической пКР. Следовательно, при выборе электродвигателя необходимо согласовать его характеристику с режимом нагрузки механизма. Например, для конвейеров указывается характер нагрузки и отношение (ТПУСК / ТНОМ)  (ТМАХ/TНОМ).
(ТМАХ/TНОМ).
Если это условие не соблюдается для данного типа электродвигателя, необходимо выбрать другой тип или предусмотреть в системе привода устройство, позволяющее разгонять электродвигатель вхолостую, а затем плавно включать нагрузку, например, с помощью фрикционной управляемой муфты.
Длительный режим работы характеризуется его продолжительностью, достаточной для того, чтобы температура нагрева двигателя достигала установившегося значения.
Большинство технологических машин, следовательно, и их приводы работают в условиях переменных режимов нагружения, которые определяются циклограммой, т.е. графиком изменения вращающего момента во времени.
Исследованием установлено, что при всем многообразии циклограмм моментов их можно приближенно свести к шести стандартным типовым режимам нагружения.
0 — постоянный режим нагружения, характерен для машин, которые работают с отклонениями от номинального режима до 20%. Он является наиболее тяжелым.
1-й — тяжёлый режим нагружения, характерен для машин, которые работают большую часть времени с нагрузками, близкими к номинальным, например, для горных машин.
11 — средний равновероятный режим нагружения, характерен для машин, которые работают одинаковое время со всеми значениями нагрузки, например, для транспортных машин.
111 — средний нормальный режим нагружения, характерен для машин, которые работают большую часть времени со средними нагрузками, например, для достаточно интенсивно эксплуатируемых машин.
1 V — лёгкий режим нагружения, характерен для машин, которые работают большую часть времени с нагрузками ниже средних, например, для широко универсальных станков.
V — особо лёгкий режим нагружения, характерен для машин, которые большую часть времени работают с малыми нагрузками, например, для металлорежущих станков.
Сведения о режимах наружения используют при проектировании зубчатых передач на выносливость (глава 4) согласно табл. 1.4.
Таблица 1.4
Коэффициенты для вычисления эквивалентного числа циклов
| Номер режима | KHE | KFE  
|
| 0 1 2 3 4 5 | 1 0,500 0,250 0,180 0,125 0,063 | 1 0,300/0,200 0,143/0,100 0,065/0,036 0,038/0,016 0,013/0,004 |
 Числитель для зубчатых колес с однородной структурой, включая ТВЧ со сквозной закалкой, и для шлифованной переходной поверхности независимо от твёрдости. Знаменатель для зубчатых колёс азотированных, цементированных и нитроцементированных с нешлифованной переходной поверхностью.
Числитель для зубчатых колес с однородной структурой, включая ТВЧ со сквозной закалкой, и для шлифованной переходной поверхности независимо от твёрдости. Знаменатель для зубчатых колёс азотированных, цементированных и нитроцементированных с нешлифованной переходной поверхностью.
При выборе электродвигателя учитывают ряд требований, обусловленных условиями и режимом работы привода: частотой вращения выходного вала, состоянием окружающей среды; типом передаточного механизма и т.д. Критериями оценки оптимальности выбора электродвигателей служат надежность и экономичность электромеханической системы, КПД, габариты и масса двигателя, его динамические характеристики.
В рамках учебного курсового проектирования эта задача решается ограниченно и заключается в подборе типоразмера по каталогу с учетом его механической характеристики.
Для определения мощности электродвигателя РЭД и частоты вращения его ротора n ЭД в техническом задании должны быть указаны мощность на выходе РВЫХ и частота вращения выходного (тихоходного) вала привода n ВЫХ. В зависимости от сложности учебной задачи указывают синхронную частоту вращения вала электродвигателя n ЭДС или проектировщик (студент), исходя из кинематических возможностей привода, сам выбирает требуемую реальную частоту вращения ротора электродвигателя n ЭДР .
При проектировании привода требуемая мощность электродвигателя определяется по мощности на тихоходном (выходном) валу. Если значение момента и частоты вращения (T = const и п = const), то требуемая мощность P ЭД определяется зависимостью:
P ЭД = Р BM /  об, (1.19)
об, (1.19)
где об — общий КПД привода;
РВМ — мощность на выходном валу.
Основные параметры асинхронных короткозамкнутых электродвигателей трехфазной серии А4 приведены в приложении (табл. П.1).
При выборе электродвигателя следует учитывать следующие положения.
Чем ниже частота вращения вала электродвигателя, тем больше его размеры, масса и стоимость. Высокооборотные двигатели, напротив, имеют меньшие размеры, массу, стоимость, чем тихоходные той же мощности. Поэтому применение тихоходного двигателя с пс = 750 мин-1 возможно при достаточном обосновании.
Следует также учитывать, что допустимая перегрузка не должна превышать 8% при постоянной и 12% при переменной нагрузке; допустимая недогрузка - 20%.
Пример. Выбрать электродвигатель к кормоприготовительной машине (рис. 1.3), выполнить кинематический расчет и определить моменты вращения на валах.
Исходные данные мощность на рабочем валу машины Р = 1,5 кВт, частота вращения рабочего вала пр = 30 мин-1, синхронная частота вращения вала электродвигателя nсэд = 3000 мин-1, режим нагружения — 5 (легкий).
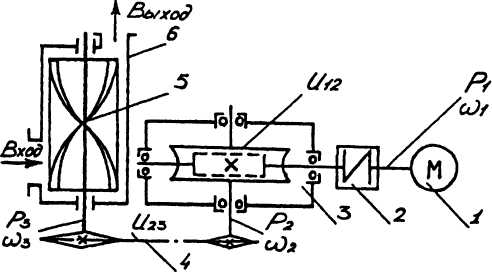 |
Рисунок 1.3 — Кинематическая схема привода:
1 — электродвигатель, 2 — муфта упругая; 3 — червячный редуктор; 4 — цепная передача; 5 — рабочий вал со спиральными лопастями; 6 — чан
Решение. 1 Определяем предварительное значение КПД привода.
 об =
об =  12 23 м n3 = 0,78×0,94×0,98×0,993 = 0,71.
12 23 м n3 = 0,78×0,94×0,98×0,993 = 0,71.
Значения отдельных звеньев приняты по табл. 1.1; КПД червячной передачи (при двухзаходном червяке)  12 = 0,78; КПД цепной передачи
12 = 0,78; КПД цепной передачи  23 = 0,94; КПД муфты м = 0,98; КПД одной пары подшипников п = 0,99 (в нашем случае — три пары).
23 = 0,94; КПД муфты м = 0,98; КПД одной пары подшипников п = 0,99 (в нашем случае — три пары).
2 Определяем требуемую мощность на ведущем валу привода Р':
P ’ = P / об = 1,5 / 0,71 = 2,1 кВт.
При заданном режиме нагрузки механизма принимаем по табл. П.1, исходя из заданной синхронной частоты вращения (nсэд = 3000 мин-1), электродвигатель серии A4 типа М80В2У3 с номинальной мощностью Pэд = 2,2 кВт, асинхронной частотой вращения вала nНОМ = 2850 мин-1; диаметр выступающего конца вала d 1 = 22 мм (потребуется при подборе муфты).
3 Определяем общее передаточное число привода и разбиваем его по ступеням:
u об = n ном / np =2850/30 = 95
Так как uоб = и12 u23, редуктор должен иметь стандартное передаточное значение (ГОСТ 2144–76), а привод в целом — компактные размеры, принимаем (табл. 5.4) u 12 = 28, тогда передаточное число цепной передачи:
u 23 = u об/u12 = 94/28 = 3,36.
4 Определяем частоты вращения (угловые скорости) валов привода:
n1 =n ном = 2850 мин-1;  1 =
1 =  n1 / 30 =3,14×2850/30 = 298,3 c-1;
n1 / 30 =3,14×2850/30 = 298,3 c-1;
n2 =n1 / и 12 = 2850/20 =142,5 мин-1;  =
=  n2/30=3,14×100,7/30=10,54 c-1;
n2/30=3,14×100,7/30=10,54 c-1;
n3 =n2/и23=100,7/3,36 = 29,97 мин-1;  =
=  n3/30=3,14×29,97/30=3,14 c-1.
n3/30=3,14×29,97/30=3,14 c-1.
5 Определяем моменты вращения на валах
T1 =P1/  1= 2,1×103/ 298,3 = 7,04 Н∙м;
1= 2,1×103/ 298,3 = 7,04 Н∙м;
P2 = P1×  м× 12×
м× 12×  =2,1×0,98× 0,78×0,992 = 1,57 кВт;
=2,1×0,98× 0,78×0,992 = 1,57 кВт;
T 2 = Р2 /  2 =1,57×103/10,5 = 149,52 Н∙м;
2 =1,57×103/10,5 = 149,52 Н∙м;
Т3 = Р3 /  3 =2,1×103/3,13 = 668,79 Н∙м.
3 =2,1×103/3,13 = 668,79 Н∙м.
Вопросы для самоконтроля
1 Раскройте содержание рис. 1.3.
2 Дайте определение понятию «привод».
3 Для каких функций существуют в машинах передачи?
4 Напишите формулы основных параметров простейшей механической передачи.
5 Какие электродвигатели наиболее распространены в приводах технологических машин, раскройте их основные характеристики.
6 Изложите порядок выбора электродвигателя при проектировании привода.
Дата: 2019-05-29, просмотров: 374.