Содержание
1. Введение
2. Выбор электродвигателя
3. Выбор структуры системы управления электроприводом
4. Выбор комплектного тиристорного электропривода
5. Выбор элементов силового электорооборудования в комплектном электроприводе
6. Функциональная и структурная схемы электропривода. Переход к относительным единицам.
7. Определение параметров силового электрооборудования
8. Выбор типа регуляторов и расчет их параметров
9. Построение статических характеристик замкнутой системы электропривода
10. Защиты в электроприводе и расчет их уставок
11. Исследование качества процессов в проектируемой системе электропривода
12. Вывод
Литература
Введение
В данном курсовом проекте необходимо спроектировать комплектный тиристорный электропривод постоянного тока на основании технических требований представленных в таблице №1. Для этого, выбран двигатель из указанного диапазона мощностей, определена структура системы управления, выбран тиристорный преобразователь и силовое оборудование к нему, произведен синтез регуляторов. На основании знаний полученных в курсе ТАУ произведена настройка системы управления на оптимальное быстродействие и устойчивость. Исследованы качества процессов в спроектированной системе.
Таблица 1.1
Исходные данные к курсовому проекту.
| Наименование | Обозначение | Величина |
| Диапазон мощностей, в пределах которого следует выбирать двигатель. КВт | От 50до99 | |
| Момент инерции механизма в долях от момента инерции двигателя. | Jм /Jд | 2.0 |
| Изменение момента статической нагрузки Мс в долях от номинального Мн | Мс/Мн | 0.8 |
| Колебания напряжения сети. | êUс=êUс/Uс | 0.25 |
| Диапазон регулирования скорости вниз от номинальной | D1=nн/nmin | 5 |
| Диапазон регулирования скорости вверх от номинальной. | D2=nmax/nн | 1 |
| Допустимая статическая ошибка поддержания скорости при минимальной уставке. | ênдин=ênс/nmin | 0.12 |
| Величина токоограничения при упоре | m=Imax/Iн | 2.0 |
| Ускорение электропривода при пуске | l=Iдин/Iн | 1.4 |
Выбор электродвигателя
Из указанного диапазона мощностей выбираю двигатель постоянного тока продолжительного режима работы типа П92, 220 В, защищенный, независимого возбуждения.
Таблица 2.1
Параметры двигателя типа П92.
| Наименование | Размерность | Значение |
| Мощность, Рн | КВт | 75 |
| Угловая скорость вала – номинальная, Nн | Об/мин | 1500 |
| Угловая скорость вала – максимальная, Nмакс | Об/мин | 2250 |
| Ток якоря – номинальный, Iн | А | 381 |
| Ток возбуждения – номинальный, Iвн | А | 4,94 |
| Сопротивление обмоток (Rя+Rдп) | Ом | 0,016836 |
| Сопротивление обмотки возбуждения, Rов | Ом | 38,796 |
| Число полюсов | 2р | 4 |
| Число параллельных ветвей | 2а | 2 |
| Момент инерции якоря, Jя | Кг*м2 | 7 |
| Масса | Кг | 705 |
| Напряжение на якоре, Uя | В | 220 |
| Поток одного полюса, Ф | МВб | 20.1 |
Выбор комплектного тиристорного электропривода
На основании выбранного электродвигателя произведем выбор промышленного комплектного тиристорного электропривода постоянного тока серии КТЭУ.
Выбираем тиристорный электропривод КТЭУ 500/220-532-1ВМТД-УХЛ4.
800- Номинальный выходной ток
220- Номинальное выходное напряжение.
5- Однодвигательный электропривод с линейным контактором.
3- По режиму работы электропривод реверсивный с реверсом тока в якорной цепи.
2- Исполнение по способу связи с питающей сетью - реакторный.
1- С устройством аварийного динамического торможения.
1- Исполнение системы автоматического регулирования (САР) – САР скорости однозонная.
Наличие устройств:
В- Питания обмотки возбуждения двигателя.
М- Питания электромагнитного тормоза.
Т- Питания обмотки возбуждения тахогенератора.
Д- Динамического торможения электропривода.
УХЛ4- Климатическое исполнение.
Таблица 4.1
Параметры электропривода КТЭУ 500/220-532-1ВМТД-УХЛ4
| Номинальное напряжение , В | Номинальный ток, А | |
| Электропривода | Выпрямителя | |
| 220 | 230 | 381 |
Данный электропривод был выбран на напряжение больше номинального напряжения двигателя.
Вывод
В данном курсовом проекте был спроектирован комплектный тиристорный электропривод постоянного тока на основании технических требований представленных в таблице №1. Для этого, выбран двигатель П 102, определена структура системы управления, выбран тиристорный преобразователь КТЭУ 800/220-532-1ВМДТ-УХЛ4 и трансформатор ТСЭП – 250/0,7У3 к нему, произведен синтез регуляторов.
Литература
1.Усынин Ю. С. Управление замкнутыми электроприводами: Конспект лекций . Ч.1. –
2. Усынин Ю. С., Осипов О. И., Мацин В. П.. Системы управления электроприводов: Учебное пособие к курсовому проектированию.-
3. Лебедев Е. Д.. Управление вентильными электроприводами постоянного тока. М.: Энергия 1970
4. Справочные данные по электрооборудованию. В 2 – х т. Т. 1. Электрические машины общего применения. – Л.: Энергия, 1964.
Спецификация
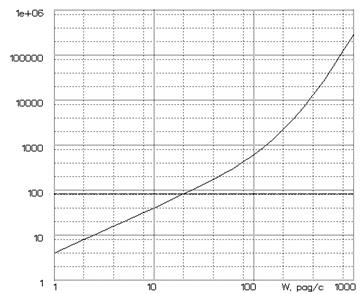 |
Рисунок 8.1 ЛАЧХ для уточнения параметров КРТ
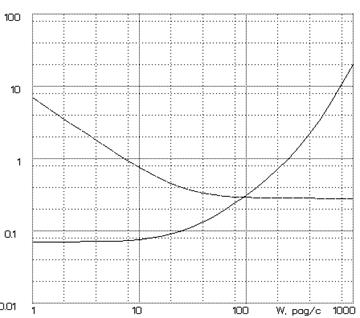 |
Рисунок 8.2 ЛАЧХ для уточнения параметров КРС.
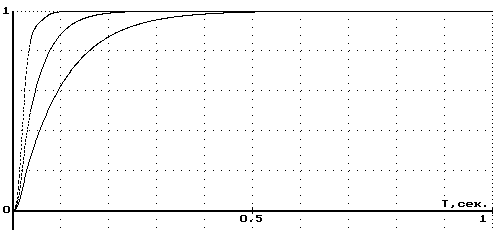 |
Рисунок 11.1. Влияние параметра Крс на показатели качества переходных процессов
Содержание
1. Введение
2. Выбор электродвигателя
3. Выбор структуры системы управления электроприводом
4. Выбор комплектного тиристорного электропривода
5. Выбор элементов силового электорооборудования в комплектном электроприводе
6. Функциональная и структурная схемы электропривода. Переход к относительным единицам.
7. Определение параметров силового электрооборудования
8. Выбор типа регуляторов и расчет их параметров
9. Построение статических характеристик замкнутой системы электропривода
10. Защиты в электроприводе и расчет их уставок
11. Исследование качества процессов в проектируемой системе электропривода
12. Вывод
Литература
Введение
В данном курсовом проекте необходимо спроектировать комплектный тиристорный электропривод постоянного тока на основании технических требований представленных в таблице №1. Для этого, выбран двигатель из указанного диапазона мощностей, определена структура системы управления, выбран тиристорный преобразователь и силовое оборудование к нему, произведен синтез регуляторов. На основании знаний полученных в курсе ТАУ произведена настройка системы управления на оптимальное быстродействие и устойчивость. Исследованы качества процессов в спроектированной системе.
Таблица 1.1
Исходные данные к курсовому проекту.
| Наименование | Обозначение | Величина |
| Диапазон мощностей, в пределах которого следует выбирать двигатель. КВт | От 50до99 | |
| Момент инерции механизма в долях от момента инерции двигателя. | Jм /Jд | 2.0 |
| Изменение момента статической нагрузки Мс в долях от номинального Мн | Мс/Мн | 0.8 |
| Колебания напряжения сети. | êUс=êUс/Uс | 0.25 |
| Диапазон регулирования скорости вниз от номинальной | D1=nн/nmin | 5 |
| Диапазон регулирования скорости вверх от номинальной. | D2=nmax/nн | 1 |
| Допустимая статическая ошибка поддержания скорости при минимальной уставке. | ênдин=ênс/nmin | 0.12 |
| Величина токоограничения при упоре | m=Imax/Iн | 2.0 |
| Ускорение электропривода при пуске | l=Iдин/Iн | 1.4 |
Выбор электродвигателя
Из указанного диапазона мощностей выбираю двигатель постоянного тока продолжительного режима работы типа П92, 220 В, защищенный, независимого возбуждения.
Таблица 2.1
Параметры двигателя типа П92.
| Наименование | Размерность | Значение |
| Мощность, Рн | КВт | 75 |
| Угловая скорость вала – номинальная, Nн | Об/мин | 1500 |
| Угловая скорость вала – максимальная, Nмакс | Об/мин | 2250 |
| Ток якоря – номинальный, Iн | А | 381 |
| Ток возбуждения – номинальный, Iвн | А | 4,94 |
| Сопротивление обмоток (Rя+Rдп) | Ом | 0,016836 |
| Сопротивление обмотки возбуждения, Rов | Ом | 38,796 |
| Число полюсов | 2р | 4 |
| Число параллельных ветвей | 2а | 2 |
| Момент инерции якоря, Jя | Кг*м2 | 7 |
| Масса | Кг | 705 |
| Напряжение на якоре, Uя | В | 220 |
| Поток одного полюса, Ф | МВб | 20.1 |
Выбор структуры системы управления электроприводом
Выбор структуры системы управления электропривода произведем с учетом требований технического задания на электропривод. В качестве внутреннего контура регулирования применяем контур регулирования тока якоря. Это обеспечит ограничение тока якоря допустимым значением при возможных перегрузках электропривода. Проверяем возможность применения в качестве внешнего контура регулирования, контур регулирования напряжения. Для проверки посмотрим, удовлетворяет ли данный выбор величине статической погрешности поддержания скорости.
Δnc=Δnc1+Δnc2 (3.1)
Δnc= 2,5%
Где Δnc1 и Δnc2- составляющие статической погрешности, вызванные приложением статической нагрузки и нестабильного потока возбуждения двигателя.
Δnc1- составляющая, вызванная приложением статической нагрузки в схеме с интегральным регулятором напряжения, когда можно принять Uя=const.
 (3.2)
(3.2)
где кяд - кратность тока короткого замыкания якорной цепи двигателя.
 (3.3)
(3.3)
Составляющую Δnc2 на стадии предварительных расчетов предсказать не удается из-за незнания величин разброса магнитного сопротивления машины и нестабильности тока возбуждения из-за нагрева обмотки, поэтому Δnс2 не учитываю.
Проверим, удовлетворяет ли полученная величина статической погрешности заданной.
Заданная величина

Рассчитанная величина


Таким образом, применение в качестве внешнего контура регулирования контур регулирования напряжения невозможно. Поэтому буду применять в качестве внешнего контура регулирования контур регулирования скорости двигателя.
Дата: 2019-05-28, просмотров: 341.