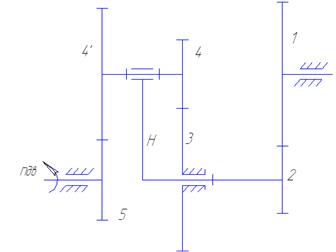
Подвижные звенья механизма.
1 – зубчатое колесо
H – водило
4-4’ – сдвоенный сателлит
5 – центральное колесо
(солнечное)
Кинематические пары.
(1-0),вр.,5 кл.
(2-0),вр.,5 кл.
(4-H),вр.,5 кл.
(5-0),вр.,5 кл.
(1-2),вр.,4 кл.
(3-4),вр.,4 кл.
(4‘-5),вр.,4 кл. Рисунок 1.5
Найдём число степеней свободы.
Запишем формулу Чебышева.
W=3∙n-2∙P5-P4 (1.1)
W=3∙4-2∙4-3=1
Число степеней свободы зубчатого механизма равно 1, следовательно, данный механизм является планетарным.
Структурный анализ кулачкового механизма
 Подвижные звенья механизма.
Подвижные звенья механизма.
1-кулачок
2-ролик
3-толкатель
Кинематические пары.
А (1-0),вр.,5 кл.
В (1-2),4 кл.
С (2-3),вр.,5 кл. Рисунок 1.6
D (3-0),пост.,5 кл.
Найдём число степеней свободы.
W=3∙n-2∙P5-P4
W=3∙3-2∙3-1=2
Число степеней свободы равно 2.
W≠1 т.к. присутствует лишнее звено ролик.
Определим число лишних звеньев по формуле:
q=W-W1 где,
q-число лишних звеньев,
W1-число степеней свободы плоского механизма,
W-имеющееся число степеней свободы.
q=2-1=1
Для получения W=1 отбросим лишнее звено и рассмотрим новую схему.

Звенья механизма.
1-кулачок
3-толкатель
Кинематические пары.
А (1-0),вр.,5 кл.
В (1-3),4 кл.
С (0-3),вр.,5 кл. Рисунок 1.7
Найдём число степеней свободы.
W=3∙n-2∙P5-P4
W=3∙3-2∙2-1=1
Число степеней свободы кулачкового механизма равно 1.
2. ДИНАМИЧЕСКИЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА
Определение скоростей
Для заданной схемы механизма строим 12 положений.
Определяем масштабный коэффициент построения механизма:
 (2.1)
(2.1)
где:  - масштабный коэффициент,
- масштабный коэффициент, 
 - длина звена,
- длина звена, 
 - длина звена на чертеже,
- длина звена на чертеже, 
Приступаем к построению повёрнутых планов скоростей для каждого положения. Рассмотрим пример построения для положения №5:
У кривошипа определяем скорость точки А
 (2.2)
(2.2)
где:  - длина звена,
- длина звена,
 - угловая скорость кривошипа,
- угловая скорость кривошипа, 


Для построения вектора скорости точки А определяем масштабный коэффициент
 (2.3)
(2.3)
где:  - скорость точки А,
- скорость точки А,
 - вектор скорости точки А,
- вектор скорости точки А,
 - полюс, выбираемый произвольно
- полюс, выбираемый произвольно

Для определения скорости точки B запишем систему уравнений:
 (2.4)
(2.4)
Вектор скорости точки А – VA известен по величине и по направлению. Вектор скорости точки С – VC равен нулю, т. к. точка С расположена на неподвижной шарнирной опоре. Вектора скорости VBA и VBC неизвестны ни по величине, ни по направлению, но нам известны их линии действия, на пересечении которых мы получим точку b. Соединив, полученную точку с полюсом π найдём длину вектора скорости точки B.

Для определения скорости центра масс 2-го звена S2 воспользуемся соотношением:
 (2.5)
(2.5)
где:  ,
,  - расстояния между соответствующими точками на механизме, м
- расстояния между соответствующими точками на механизме, м
 ,
,  - длинны векторов скоростей на плане, мм
- длинны векторов скоростей на плане, мм
 мм
мм
Соединив, точку  и π получим скорость центра масс второго звена.
и π получим скорость центра масс второго звена.


Для определения скорости точки D воспользуемся следующим соотношением
 (2.6)
(2.6)
где:  ,
,  - расстояния между соответствующими точками на механизме, м
- расстояния между соответствующими точками на механизме, м  ,
,  - длинны векторов скоростей на плане, мм
- длинны векторов скоростей на плане, мм
 мм
мм

Для определения скорости центра масс 3-го звена S3 воспользуемся соотношением:
 (2.7)
(2.7)
где:  ,
,  - расстояния между соответствующими точками на механизме, м
- расстояния между соответствующими точками на механизме, м
 ,
,  - длинны векторов скоростей на плане, мм
- длинны векторов скоростей на плане, мм
 мм
мм
т.к.  , то
, то

Так как центр массы 4-го звена совпадает точкой D то,
Для определения скорости точки D’ запишем систему уравнений:
 (2.8)
(2.8)
Вектор скорости точки D – VD известен по величине и по направлению. Вектор скорости точки E – VE равен нулю, т. к. точка E расположена на неподвижной опоре.
Вектора скорости VD’D и VD’E неизвестны ни по величине, ни по направлению, но нам известны их линии действия, на пересечении которых мы получим точку d’. Соединив, полученную точку с полюсом π найдём длину вектора скорости точки D’.

Так как 5-е звено совершает только поступательное движение то, скорости всех точек данного звена одинаковы.
Определим значения угловых скоростей звеньев.



Направление  определяем, перенеся вектор ab в точку S2 – второе звено вращается против часовой стрелки. Аналогично получим, что
определяем, перенеся вектор ab в точку S2 – второе звено вращается против часовой стрелки. Аналогично получим, что  направлена по часовой стрелке. Скорости остальных точек определяются аналогичным образом. Все значения сводим в таблицу(2.1).
направлена по часовой стрелке. Скорости остальных точек определяются аналогичным образом. Все значения сводим в таблицу(2.1).
Таблица 2.1 – Значения линейных и угловых скоростей.
| N положения | VB,

| VS2,
| VD=VS4,
| VS3,
| VD’=VS5,
| VAB,
| ,

|  , ,
|
| 1 | 0 | 2,994 | 0 | 0 | 0 | 4,71 | 15,596 | 0 |
| 2 | 2,734 | 2,933 | 4,614 | 1,452 | 3,367 | 5,959 | 19,731 | 17,089 |
| 3 | 5,335 | 4,351 | 9,002 | 2,834 | 7,958 | 4,891 | 16,194 | 33,341 |
| 4 | 4,94 | 4,781 | 8,337 | 2,624 | 8,241 | 0,767 | 2,54 | 30,877 |
| 5 | 3,572 | 4,113 | 6,029 | 1,898 | 5,989 | 2,816 | 9,326 | 22,328 |
| 6 | 2,166 | 3,265 | 3,655 | 1,151 | 3,498 | 4,716 | 17,177 | 13,537 |
| 7 | 0 | 2,994 | 0 | 0 | 0 | 4,71 | 15,596 | 0 |
| 8 | 1,543 | 3,445 | 2,604 | 0,82 | 2,443 | 3,659 | 12,116 | 9,645 |
| 9 | 3,547 | 4,237 | 5,986 | 1,884 | 5,877 | 1,785 | 5,911 | 22,17 |
| 10 | 4,596 | 4,666 | 7,756 | 2,441 | 7,737 | 0,343 | 1,135 | 28,724 |
| 11 | 4,675 | 7,851 | 2,472 | 7,338 | 0,751 | 2,487 | 29,078 | |
| 12 | 3,701 | 4,262 | 6,246 | 1,966 | 5,044 | 1,999 | 6,62 | 23,133 |
Дата: 2019-05-28, просмотров: 369.