Содержание
Введение
Глава 1. Механические системы и анимационное моделирование.
§ 1.1 Некоторые аспекты создания модели механической системы.
§ 1.1.1 Механические системы. Центр масс.
§ 1.1.2 Количество движения системы тел, закон сохранения количества движения
§ 1.1.3 Движение центра масс механической системы.
§ 1.1.4 Движение тел переменной массы. Уравнение Мещерского. Формула Циалковского.
§ 1.2 Некоторые задачи моделирования механических систем (на примере движение тела с переменной массой).
§ 1.3 Анимационное моделирование процесса обучения механических систем.
Глава 2. Анимационно – обучающий метод механической системы.
§ 2.1 Анимация механической системы.
§ 2.1.1 Обучающие программы.
§ 2.1.2 Описание установки.
§ 2.1.3 Алгоритмизация анимационно – обучающей механической системы.
§ 2.2 Инструкция пользования анимационно-обучающей программы “Water Program”
§ 2.3 Текст анимационно – обучающей программы механической системы.
Заключение.
Список использованной литературы.
Введение
При изучения двух тел закон движения одного или двух тел не исчерпывает всех возможных задач о механическом движений с которыми мы сталкиваемся при изучений природы и в технике. Не редко приходиться иметь дело с движением совокупности взаимодействующих между собой тел, или с движением как говорят механической системы. При изучения или обучения таких систем приходиться рассматривать процесс системно. То есть каждую часть этой системы надо представить эту систему в частности и в комплексе учитывая взаимодействие этих систем. Создание физических установок для изучения свойства этих систем является очень сложной задачи. Но с другой стороны с помощью анимационных методов компьютерного моделирования можно создать виртуальной установки свойств механических систем. Такие виртуальные установки при обучения играет не заменимую роль. Так как с помощью этого метода можно полностью не только изучить , но даже визуально представить внутренние движение механической системы. Тем самым можно сказать об актуальности создание таких установок. С другой стороны создание виртуальных установок связанно с созданием концептуальной модели механической системы. Это раз. Второе – алгоритмизации этой модели. Третье – компьютерной реализаций этих алгоритмов. В комплексе решение этих проблем является обязанностью любого информатика.
В принципе создание комплексной модели требует от информатика глубокого знания предложной области. А алгоритмизация выражает способность математическое мышление информатика. В принципе всегда основные анимационные методы заключается – искусственные представление движение в кино, на телевидение или в комплексной графике путем отображения последовательности рисунков или кадров частотой, при которой обеспечивается целостное зрительное восприятие образов. С другой стороны после создания виртуальной анимационной программы установки нам представляет разработки педагогических методов обучения на этой установке. Связи с этим создание анимационной обучающий программы для изучения движения тела с переменной массы является востребованной.
ГЛАВА1.МЕХАНИЧЕСКИЕ СИСТЕМЫ И АНИМАЦИОННЫЕ МОДЕЛИРОВАНИЕ
Некоторые аспекты создания модели механической системы
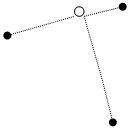
Центром масс трех материальных точек называется точка, которая делит расстояние между центром масс двух из них и третьей точкой в отношении, обратно пропорциональном сумме масс двух первых и массе третьей из них.
Легко получить координаты центра масс трех материальных точек, подобно тому как это сделано выше для двух точек:
 |
m2=2
m1=1
Ä
m3=12
Рис.1. К определению центра масс материальных точек:
 -центр масс m1 и m2;
-центр масс m1 и m2;
 - центр масс m1, m2 и m3;
- центр масс m1, m2 и m3;

Прибавляя к системе четвертую, пятую и т. д. точки, получим, что координаты центра масс системы n материальных точек:



Центр масс механической системы движется так же, как двигалась бы материальная точка, в которой сосредоточена масса всех тел системы, под действием результирующей внешних сил, приложенных к телам, образующим систему.
Если механическая система замкнута, т. е.  то
то
 =const.
=const.
Задачи к главе 1
1.1. Частица движется с импульсом  под действием силы F(t). Пусть a и b – постоянные векторы, причем a ^ b. Полагая, что:
под действием силы F(t). Пусть a и b – постоянные векторы, причем a ^ b. Полагая, что:
1)  , где
, где  - положительная постоянная, найти вектор F в те моменты времени, когда F ^ p;
- положительная постоянная, найти вектор F в те моменты времени, когда F ^ p;
2)  , где
, где  - вектор, противоположный по направлению вектору а, найти вектор p в момент
- вектор, противоположный по направлению вектору а, найти вектор p в момент  , когда он окажется повернутым на 90○ по отношению к вектору .
, когда он окажется повернутым на 90○ по отношению к вектору .
Решение. 1. Сила  , т. е. вектор F все время перпендикулярен вектору a. Следовательно, вектор F будет перпендикулярен вектору p в те моменты, когда коэффициент при b в выражении для
, т. е. вектор F все время перпендикулярен вектору a. Следовательно, вектор F будет перпендикулярен вектору p в те моменты, когда коэффициент при b в выражении для  обращается в нуль. Отсюда
обращается в нуль. Отсюда  и
и  соответствующие значения вектора F равны:
соответствующие значения вектора F равны:

2. Приращение вектора p за промежуток времени  есть
есть  Интегрируя это уравнение с учетом начальных условий, находим
Интегрируя это уравнение с учетом начальных условий, находим
где, по условию,  противоположен вектору а. Вектор p окажется перпендикулярным вектору в момент
противоположен вектору а. Вектор p окажется перпендикулярным вектору в момент  , когда
, когда  . В этот момент
. В этот момент  .
.
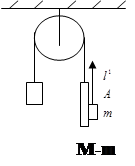 |
Рис. 6
1.2. Через блок (рис. 6) перекинут шнур на одном конце которого находится лестница с человеком А, а на другом – уравновешивающий груз массы М. Человек , масса которого m, совершил вверх перемещение  относительно лестницы и затем остановился. Пренебрегая массами блока и шнура, а также трением в оси блока, найти перемещение центра инерции этой системы.
относительно лестницы и затем остановился. Пренебрегая массами блока и шнура, а также трением в оси блока, найти перемещение центра инерции этой системы.
Решение. Сначала все тела системы покоились, поэтому приращение импульсов тел при движении равно самим импульсам. Силы натяжения шнура слева и справа одинаковы, а следовательно импульсы груза  и лестницы с человеком
и лестницы с человеком  в каждый момент времени будут равны между собой, т. т.
в каждый момент времени будут равны между собой, т. т.  , или
, или
 ,
,
где  v1, v и v2 - - скорости груза, человека и лестницы. Учитывая , что v2= -v1 и v=v2 + v¢, где v¢ - скорость человека относительно лестницы, получим
v1, v и v2 - - скорости груза, человека и лестницы. Учитывая , что v2= -v1 и v=v2 + v¢, где v¢ - скорость человека относительно лестницы, получим
v1= (m/2M)v¢. (1)
С другой стороны , импульс всей системы. Отсюда с учетом (1) найдем
 .
.
И наконец, искомое перемещение
 .
.
Другой способ решения основан на свойстве центра инерции данной системы характеризуется радиусом – вектором
 ,
,
где  - радиусы-векторы центров инерции груза M, лестницы и человека относительно некоторой точки О данной системы отсчета. Отсюда перемещение центра инерции
- радиусы-векторы центров инерции груза M, лестницы и человека относительно некоторой точки О данной системы отсчета. Отсюда перемещение центра инерции  равно
равно
 ,
,
где
 -перемещения груза M, лестницы и человека относительно данной системы отсчета. Имея в виду, что
-перемещения груза M, лестницы и человека относительно данной системы отсчета. Имея в виду, что  получим в результате
получим в результате
 .
.
1.3. система состоит из двух шариков с массами  , которые соединены между собой невесомой пружинкой. Шарикам сообщили скорости
, которые соединены между собой невесомой пружинкой. Шарикам сообщили скорости  , как показано на рис.7, после чего система начала двигаться в однородном поле сил тяжести Земли. Пренебрегая сопротивлением воздуха и считая, что в начальный момент пружинка не деформирована, найти:
, как показано на рис.7, после чего система начала двигаться в однородном поле сил тяжести Земли. Пренебрегая сопротивлением воздуха и считая, что в начальный момент пружинка не деформирована, найти:
1) скорость  центра инерции этой системы в зависимости от времени;
центра инерции этой системы в зависимости от времени;
2) внутреннюю механическую энергию системы в процессе движения.
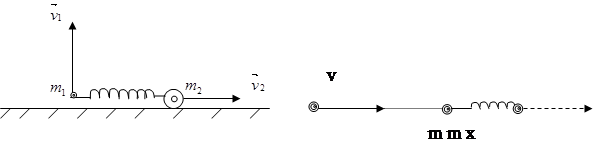 |
Рис. 7 рис. 8
Решение. 1. Приращение вектора скорости центра инерции, есть  . проинтегрировав это уравнение, получим
. проинтегрировав это уравнение, получим  , где
, где  -начальная скорость центра инерции. Отсюда
-начальная скорость центра инерции. Отсюда
 .
.
3. Внутренняя механическая энергия системы – это ее энергия
 .
.
4. Шарик с кинетической энергией T, испытав лобовое соударение с первоначально покоившейся упругой гантелью (рис. 8), отлетел в противоположном направлении с кинетической энергией  . Массы всех трех шариков одинаковы. Найти энергию колебаний гантели после удара.
. Массы всех трех шариков одинаковы. Найти энергию колебаний гантели после удара.
Решение. пусть  -импульсы налетающего шарика до и после удара, а
-импульсы налетающего шарика до и после удара, а  -импульс и кинетическая энергия гантели как целого после удара, Е -энергия колебаний. Согласно законам сохранения импульса и энергии,
-импульс и кинетическая энергия гантели как целого после удара, Е -энергия колебаний. Согласно законам сохранения импульса и энергии,
 .
.
Из этих двух уравнений с учетом того, что  , получим
, получим
 .
.
5 В К-системе частица 1 массы  налетает на покоящуюся частицу 2 массы
налетает на покоящуюся частицу 2 массы  . Заряд каждой частицы равен
. Заряд каждой частицы равен  . Найти минимальное расстояние, на которое они сблизятся при лобовом соударении, если кинетическая энергия частицы 1 вдали от частицы 2 равна
. Найти минимальное расстояние, на которое они сблизятся при лобовом соударении, если кинетическая энергия частицы 1 вдали от частицы 2 равна  .
.



Рис. 9
Решние . Рассмотрим этот процесс как в К-системе, так и в Ц-системе.
1. В К-системе в момент наибольшего сближения обе частицы будут двигаться как единое целое со скоростью  , которую можно определить на основании закона сохранения импульса:
, которую можно определить на основании закона сохранения импульса:
 ,
,
где p1 –импульс налетающей частицы, 
С другой стороны, из закона сохранения энергии следует
 ,
,
где приращение потенциальной энергии системы 
Исключив  из этих двух уравнений, найдем
из этих двух уравнений, найдем
 .
.
2. В Ц-системе решение наиболее просто: здесь суммарная кинетическая энергия частиц идет целиком на приращение потенциальной энергии системы в момент наибольшего сближения:
 ,
,
где , согласно (4.16),

Отсюда легко найти 
6. Частица массы с импульсом  испытала упругое столкновение с покоившейся частицей массы
испытала упругое столкновение с покоившейся частицей массы  . Найти импульс
. Найти импульс  первой частицы после столкновения, в результате которого она рассеялась под углом
первой частицы после столкновения, в результате которого она рассеялась под углом  к первоначальному направлению движения.
к первоначальному направлению движения.
Решение. Из закона сохранения импульса (рис. 69) находим

где  -импульс второй частицы после столкновения.
-импульс второй частицы после столкновения.
С другой стороны, из закона сохранения энергии следует, что  , где
, где  -кинетические энергии первой и второй частиц после столкновения. Преобразуем это равенство с помощью соотношения
-кинетические энергии первой и второй частиц после столкновения. Преобразуем это равенство с помощью соотношения  к виду
к виду
 |
 |
Если

то физический смысл имеет только знак плюс перед корнем. Это следует из того, что при этом условии корень будет больше, чем а так как ṕ́’1 – это модуль, то, естественно, он не может быть отрицательным.
Если же m1>m2 , то физический смысл имеют оба знака перед
корнем – ответ в этом случае получается неоднозначным: под углом 
импульс рассеянной частицы может иметь одно из двух значений (это зависит от относительного расположения частиц в момент соударения).
1.7. Какую часть η своей кинетической энергии теряет частица массы m1 при упругом рассеянии под предельным углом на покоящейся частице массы m2 , где m1>m2
Обучающие программы
Современное время характеризуется возрастающими темпами научно-технического прогресса, непрерывным увеличением объема и изменением содержания знаний, умений и навыков, которыми должны владеть современные специалисты различных категорий, следствием чего является повышение требований к качеству их подготовки.
Одним из перспективных способов повышения эффективности процесса обучения является его автоматизация, т.е. использование в качестве средства обучения современной вычислительной техники. Эффективность использования компьютерной техники зависит от многих факторов. И первым из них следует назвать обучающую программу. Без всякого преувеличения можно утверждать, что она является сердцевиной обучающей системы.
Что представляет собой обучающая программ? Это программа, которая управляет учебной деятельностью учащегося и выполняет, как правило частично, функции учителя. В обучающей программе можно выделить следующие компоненты:
• учебные материалы (тексты, рисунки, схемы, задачи, вопросы и т. д.);
• специальную программу , определяющую, какую именно учебный материал и в какой последовательности представляется учащемуся.
Иногда в обучающей программе содержатся не тексты учебных задач (вопросов), а определенные правила, в соответствии с которыми система генерирует задачи (вопросы). С точки зрения дидактики систему компьютерного обучения можно представить как систему обучающих программ и способов их реализации (иногда вместо термина обучающая программа используют такие термины, как педагогический программный продукт, учебное обеспечение, пакет прикладных программ). Компьютер (техническое обеспечение) и программное обеспечение выступают как средство реализации обучающей программы, а их параметры реализуются с точки зрения возможностей и способов реализации обучающих программ. Это ни в коей мере не снижает роль компьютера и его программного обеспечения. Однако они должны оцениваться не сами по себе, а с точки зрения дидактических возможностей (и, естественно, ограничений), которые оказывают влияние на учебный процесс.
Заключение
Сам процесс изучения физических закономерностей и явлений считается очень сложным. Но с помощью компьютерного моделирования можно разработать хороший метод познания. Такой метод познания осуществляется с помощью анимационо-обучающей программы. Преимущество этого метода при обучении заключаются в следующем:
- Комплексно визуально наблюдать изучаемые физические явления;
- Варирия параметрами моделей, можно вскрыть различные стороны этого явления;
- С помощью обучающих программ можно резко повысить интеллектуальный уровень не только обучающего но и обучаемого;
- Создание таких комплекс программ расширяет программное обеспечение компьютеров;
Список использованной литературы
1. И. Е. Иродов “Основные законы механики” (стр. 120-128)
2. М. М. Архангельский “ Курс физики. Механика ” (стр. 96-109)
3. А. И. Марченко , Л. А. Марченко “Программирование в среде Turbo Pascal”
4. Я.Б.Зельдович “Высшая математика для начинающих” (стр. 383-394)
5. Э.Е. Эвенчик, С.Я.Шамаш, В.А.Орлов. “Методика преподования физики средней школе” (стр.199-205)
Из саитов интернета:
1. www.Bankreferat.ru
2. www.Mail.ru
3. www.Referats.ru
4. www.Aport.ru
5. www.Rambler.ru
Содержание
Введение
Глава 1. Механические системы и анимационное моделирование.
§ 1.1 Некоторые аспекты создания модели механической системы.
§ 1.1.1 Механические системы. Центр масс.
§ 1.1.2 Количество движения системы тел, закон сохранения количества движения
§ 1.1.3 Движение центра масс механической системы.
§ 1.1.4 Движение тел переменной массы. Уравнение Мещерского. Формула Циалковского.
§ 1.2 Некоторые задачи моделирования механических систем (на примере движение тела с переменной массой).
§ 1.3 Анимационное моделирование процесса обучения механических систем.
Глава 2. Анимационно – обучающий метод механической системы.
§ 2.1 Анимация механической системы.
§ 2.1.1 Обучающие программы.
§ 2.1.2 Описание установки.
§ 2.1.3 Алгоритмизация анимационно – обучающей механической системы.
§ 2.2 Инструкция пользования анимационно-обучающей программы “Water Program”
§ 2.3 Текст анимационно – обучающей программы механической системы.
Заключение.
Список использованной литературы.
Введение
При изучения двух тел закон движения одного или двух тел не исчерпывает всех возможных задач о механическом движений с которыми мы сталкиваемся при изучений природы и в технике. Не редко приходиться иметь дело с движением совокупности взаимодействующих между собой тел, или с движением как говорят механической системы. При изучения или обучения таких систем приходиться рассматривать процесс системно. То есть каждую часть этой системы надо представить эту систему в частности и в комплексе учитывая взаимодействие этих систем. Создание физических установок для изучения свойства этих систем является очень сложной задачи. Но с другой стороны с помощью анимационных методов компьютерного моделирования можно создать виртуальной установки свойств механических систем. Такие виртуальные установки при обучения играет не заменимую роль. Так как с помощью этого метода можно полностью не только изучить , но даже визуально представить внутренние движение механической системы. Тем самым можно сказать об актуальности создание таких установок. С другой стороны создание виртуальных установок связанно с созданием концептуальной модели механической системы. Это раз. Второе – алгоритмизации этой модели. Третье – компьютерной реализаций этих алгоритмов. В комплексе решение этих проблем является обязанностью любого информатика.
В принципе создание комплексной модели требует от информатика глубокого знания предложной области. А алгоритмизация выражает способность математическое мышление информатика. В принципе всегда основные анимационные методы заключается – искусственные представление движение в кино, на телевидение или в комплексной графике путем отображения последовательности рисунков или кадров частотой, при которой обеспечивается целостное зрительное восприятие образов. С другой стороны после создания виртуальной анимационной программы установки нам представляет разработки педагогических методов обучения на этой установке. Связи с этим создание анимационной обучающий программы для изучения движения тела с переменной массы является востребованной.
ГЛАВА1.МЕХАНИЧЕСКИЕ СИСТЕМЫ И АНИМАЦИОННЫЕ МОДЕЛИРОВАНИЕ
Дата: 2019-05-28, просмотров: 304.