Дипломный проект
по специальности "Подъемно-транспортные, строительные, дорожные машины и оборудование"
Тема: Разработка оборудования для дозировки балласта
Пояснительная записка
ДП 07.00.00.00 ПЗ
(обозначение документа)
2010
Содержание
Введение
1. Анализ конструкций оборудования для дозировки балласта
2. Расчет рабочего оборудования
2.1 Компоновка рабочего оборудования
2.2 Геометрические параметры дозатора
2.3 Кинематические параметры дозатора
2.4 Расчет сил действующих на дозатор
2.5 Тяговый расчет машины
2.6 Конструирование частей дозатора
2.7 Проектирование механизмов дозатора
3. Организация путевых работ
3.1 Выбор технологической схемы выполнения работ и типов машин
3.2 Разработка схем формирования рабочих поездов на станции и во время работ в "окно"
3.3 Определение основных параметров технологического процесса
3.4Разработка графика производства работ в "окно"
4. Экономический расчет
4.1 Расчет капитальных затрат на модернизацию
5. Охрана труда
Заключение
Список используемых источников
Введение
Производится дозировка балласта по уровню. Возникает проблема дозировки балласта в кривых участках пути, то есть уровень дозировки не должен быть не равномерен по ширине поперечного профиля верхнего строения пути.
Электробалластеры являются универсальными многооперационными высокопроизводительными машинами непрерывного действия, предназначенными для постановки пути на балластное основание при выполнении работ по строительству и техническому обслуживанию пути, предусмотренных действующей системой ведения путевого хозяйства. Электробалластеры выполняют дозировку балласта, предварительно выгруженного вдоль пути, срезку балласта у торцов шпал, планировку откосов и междупутных зон призмы, подъемку путевой решетки на формируемый балластный слой. Производят грубую выправку и рихтовку пути, оправку обочин земляного полотна, работы на щебеночных базах для формирования штабелей балластных материалов, подъемку пролетных строений малых мостов при ремонте. Нашли применения двухсекционные электробалластеры пролетного типа ЭЛБ-3М, ЭЛБ-3ТС ( для транспортного строительства ), ЭЛБ-3МК и ЭЛБ-4. Базы для размещения оборудования у всех электробалластеров принципиально одинакова.
РАСЧЕТ МЕХАНИЗМА РАБОЧЕГО ОБОРУДОВАНИЯ
Тяговый расчет машины
Цель расчета: определить тягу локомотива при дозировке пути и подобрать локомотив
Исходные данные: уклон – 0,015; радиус кривой – 250м.; остальные данные взяты в пояснительной записке
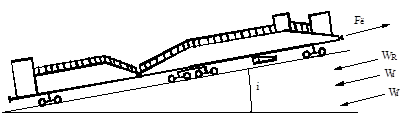
Рисунок 1 – Расчетная схема для определения действующих на машину сопротивлений
Суммарное сопротивление перемещению машины:
 ,
,
где к – коэффициент на неучтенные сопротивления;
 - сопротивление перемещению при дозировке;
- сопротивление перемещению при дозировке;


 - сопротивление перемещению машины как повозки:
- сопротивление перемещению машины как повозки:
 ,
,
где  - вес машины;
- вес машины;  - удельное сопротивление перемещению машины;
- удельное сопротивление перемещению машины;
 .
.
 .
.
 - сопротивление при движении на уклоне:
- сопротивление при движении на уклоне:
 ,
,
где  - удельное сопротивление движению на подъеме:
- удельное сопротивление движению на подъеме:
 .
.
 - сопротивление при движении по кривой:
- сопротивление при движении по кривой:
 ,
,
где  - удельное сопротивление при движении по кривой:
- удельное сопротивление при движении по кривой:
 .
.
 .
.
 - сопротивление при трогании с места:
- сопротивление при трогании с места:
 ,
,
где  - удельное сопротивление при трогании с места:
- удельное сопротивление при трогании с места:
 ,
,
где  - нагрузка на колесную пару:
- нагрузка на колесную пару:
 .
.
 .
.
Предварительно принимаем тяговую силу и принимаем локомотив при условии:
 .
.

Принят тепловоз ТЭ10 со следующими характеристиками:
Конструкционная скорость  , км/ч ……………100;
, км/ч ……………100;
Расчетная масса, т………………………………..129;
Тип электродвигателя……………………………ЭД107.
На рисунке 2 приведена тяговая характеристика тепловоза ТЭ10 для соответствующей силы тяги.
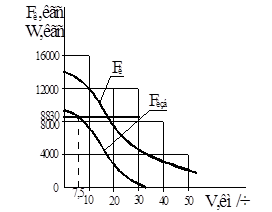
Рисунок 2 - Тяговая характеристика тепловоза ТЭ10
На рисунке 2  - касательная сила тяги тепловоза. По известной
- касательная сила тяги тепловоза. По известной  определяют избыточную силу тяги
определяют избыточную силу тяги  :
:
 .
.
 .
.
По графику определена скорость тепловоза при дозировке пути:
 7,5км/ч = 2,08 м/с.
7,5км/ч = 2,08 м/с.
Данная скорость удовлетворяет, т.к. по прототипу скорость при дозировке  1,39 – 4,17 м/с.
1,39 – 4,17 м/с.
Суммарное сопротивление перемещению машины:

Экономический расчет
Охрана труда
Мероприятия по обеспечению безопасности движения поездов и техники, личной безопасности при производстве механизированных работ.
Порядок закрытия перегона и ограждения места работ.
Закрытие перегона или одного из путей производится с разрешения начальника отделения дороги и по согласованию с начальником службы движения, если предоставляемое "окно" не вызывает изменения установленных размеров движения с соседними дорогами. Если такое закрытие вызывает изменения установленных размеров движения и время прибытия поездов на соседние дороги, оно может быть разрешено только начальником дороги по согласованию с Управлением движения МПС (ЦД МПС).
Порядок ограждения мест производства работ осуществляется в соответствии с Инструкцией по обеспечению безопасности движения поездов при производстве путевых работ (ЦП/4402) с учетом требований Инструкции по сигнализации на железных дорогах Российской Федерации. Порядок ограждения приведен на рисунок 5.1.
При фронте работ более 200 м на расстоянии 50 м от границы участка устанавливают красные сигналы, охраняемые сигналистами с ручными красными сигналами. Когда место производства работ находится вблизи станции, то ограждение производится переносным красным сигналом, установленным по оси пути против входного сигнала или сигнального знака "Граница станции", с укладкой трёх петард, охраняемых сигналистами. Места производства работ, требующие следования поездов с уменьшенной скоростью на перегонах ограждают с обеих сторон от границы участка работ на расстоянии 50 м переносными сигналами "Начало опасного места" и "Конец опасного места".
Технические требования на приемку отремонтированного пути
Приемку отремонтированных участков пути выполняют после проведения всего комплекса работ комиссионно под председательством начальника дистанции пути.
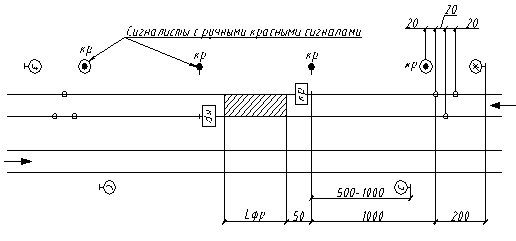 Рисунок 5.1 – Ограждение места работ.
Рисунок 5.1 – Ограждение места работ.
В состав комиссии входят: исполнитель работ, приемщик по качеству ремонта, дорожный мастер и бригадир пути.
При сдаче отремонтированных участков пути составляется акт приемки выполненных работ по форме ПУ-48 и представляется следующая техническая документация: исполненный продольный профиль; графики, отражающие состояние кривых участков пути по стрелам прогиба; выписка из ведомости состояния отремонтированного пути по данным вагона-путеизмерителя (для станционных путей — по данным путеизмерительной тележки или ручных промеров); акт об укладке в путь сварных рельсовых плетей;ведомость состояния стыковых зазоров и др.
заключение
В данной работе в соответствии с поставленной целью были выполнены: анализ конструкций оборудования для дозировки балласта, расчет рабочего оборудования, компоновка рабочего оборудования на машине, геометрические параметры дозатора, кинематические параметры дозатора, расчет сил, действующих на дозатор, тяговый расчет машины, конструирование частей дозатора, проектирование механизмов дозатора, организация путевых работ, экономический расчет, в котором определяли экономическую эффективность модернизации существующей техники, применяемой в тех же работах при таких же условиях. Из проделанных расчетов видно, что разработанное новое оборудование окупается через 28 месяцев. Охрана труда и графические документы.
Дипломный проект
по специальности "Подъемно-транспортные, строительные, дорожные машины и оборудование"
Тема: Разработка оборудования для дозировки балласта
Пояснительная записка
ДП 07.00.00.00 ПЗ
(обозначение документа)
2010
Содержание
Введение
1. Анализ конструкций оборудования для дозировки балласта
2. Расчет рабочего оборудования
2.1 Компоновка рабочего оборудования
2.2 Геометрические параметры дозатора
2.3 Кинематические параметры дозатора
2.4 Расчет сил действующих на дозатор
2.5 Тяговый расчет машины
2.6 Конструирование частей дозатора
2.7 Проектирование механизмов дозатора
3. Организация путевых работ
3.1 Выбор технологической схемы выполнения работ и типов машин
3.2 Разработка схем формирования рабочих поездов на станции и во время работ в "окно"
3.3 Определение основных параметров технологического процесса
3.4Разработка графика производства работ в "окно"
4. Экономический расчет
4.1 Расчет капитальных затрат на модернизацию
5. Охрана труда
Заключение
Список используемых источников
Введение
Производится дозировка балласта по уровню. Возникает проблема дозировки балласта в кривых участках пути, то есть уровень дозировки не должен быть не равномерен по ширине поперечного профиля верхнего строения пути.
Электробалластеры являются универсальными многооперационными высокопроизводительными машинами непрерывного действия, предназначенными для постановки пути на балластное основание при выполнении работ по строительству и техническому обслуживанию пути, предусмотренных действующей системой ведения путевого хозяйства. Электробалластеры выполняют дозировку балласта, предварительно выгруженного вдоль пути, срезку балласта у торцов шпал, планировку откосов и междупутных зон призмы, подъемку путевой решетки на формируемый балластный слой. Производят грубую выправку и рихтовку пути, оправку обочин земляного полотна, работы на щебеночных базах для формирования штабелей балластных материалов, подъемку пролетных строений малых мостов при ремонте. Нашли применения двухсекционные электробалластеры пролетного типа ЭЛБ-3М, ЭЛБ-3ТС ( для транспортного строительства ), ЭЛБ-3МК и ЭЛБ-4. Базы для размещения оборудования у всех электробалластеров принципиально одинакова.
Анализ конструкций оборудования для дозировки балласта
Дозатор предназначен для дозировки балласта, грубой оправки балластной призмы, срезки обочин земляного полотна, а так же для перераспределения балласта в продольном и поперечном направлениях по отношению к оси пути, срезки лишнего балласта и других работ. Электробалластер ЭЛБ-1 оборудован двумя дозаторами двустороннего действия, по одному на фермах № 1 и №2. Дозатор (рисунок 1) состоит из щита 14, двух крыльев 12, корневыми частями шарнирно соединенных со щитом, и подкрылков 10. Для управления дозатором имеются механизмы наклона крыла 8, подъема и опускания щита дозатора 4, поворота крыла 5 с редуктором 3, а также аппаратура управления электродвигателями и контроля положения дозатора. Щит дозатора представляет собой коробку, сваренную из листовой стали толщиной 6—8 мм, снабженную внутри ребрами жесткости и направляющими для перемещения щита по двум опорным стойкам 15, которые прикреплены к ферме машины. Он соединен валом 6 и карданным шарниром 7 с винтами типовых редукторов механизмов подъема и опускания дозатора.
Крыло дозатора состоит из корня крыла 13, собственно крыла 12, секторного ножа 11, подкрылка 10 и параллелограммной тяги 9. Наклон крыла осуществляет механизм наклона 8. Для наклона крыла винт перемещают вверх. При этом часть крыла, связанная с винтом, также поднимается, поворачивая крыло вокруг шарнира 2 и создавая нужный наклон крыла. При любых наклонах крыла в вертикальной плоскости подкрылок 10 остается параллельным своему первоначальному положению. Это достигается благодаря тому, что точки крепления подкрылка — шарнир 1 и шарнир параллелограммной тяги 9 на подкрылке — образуют с шарниром 2 и вторым шарниром тяги 9 на корне крыла параллелограмм. Одна сторона параллелограмма, связанная с корнем крыла, сохраняет постоянное направление, поэтому другая сторона, связанная с подкрылком, всегда ей
параллельна. Нижняя грань подкрылка в исходном положении горизонтальна, поэтому и при любом наклоне крыла она горизонтальна.
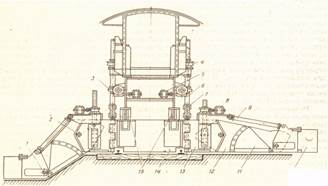
Рисунок 1- Дозатор
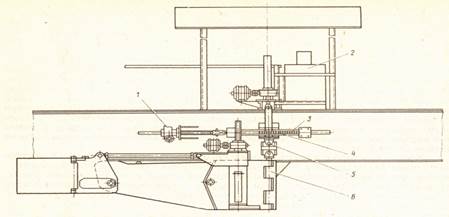
Рисунок 2- Дозатор в транспортном положении
Крыло поворачивают механизмом 1 (рисунок 2 ) поворота, винт которого соединяется шарнирно с рейкой 3, сцепленной с шестерней 4. Последняя посажена на вал поворота крыла и связана с ним скользящей шпонкой. В зави-симости от направления вращения электродвигателя винт перемещается влево или вправо. Перемещение винта и связанной с ним рейки 3 вызывает поворот шестерни 4, а следовательно, и вала механизма поворота. Поворот вала передается на крыло карданным валом 5 и валом петлевого шарнира 6, с которым крыло связано срезными штифтами и сегментными упорами. Такое соединение крыла с валом петлевого шарнира предохраняет самотормозящийся механизм поворота крыла от поломок при обрыве стяжек крыла или в других случаях перегрузки. Дозатором управляют с поста 2. Дозатор поднимают и опускают два механизма 4 (см. рисунок 2). При этом щит дозатора перемещается по опорным стойкам 15. Ход щитов дозаторов: фермы № 1 выше головки рельса 300 мм, ниже головки рельса 100 мм; фермы № 2 выше головки рельса 250 мм, ниже головки рельса 100 мм.
Электробалластер ЭЛБ-3м
Эта машина предназначена для выполнения балластировочных работ на пути с тяжелым типом верхнего строения (рельсы Р65, Р75 и железобетонные шпалы). По сравнению с ЭЛБ-1 в конструкцию электробалластера ЭЛБ-3М (рисунок 3) внесены изменения: увеличено расстояние между тележками 7 и 15 с 28 до 30,2 м, грузоподъемность электромагнитного подъемника доведена до 440 кН (вместо 300 кН); ход механизма подъема теперь составляет 450 мм, что на 50 мм больше; усилена конструкция дозатора, улучшена его маневренность благодаря увеличению скорости его подъема и опускания, а также установке механизма для прикрытия крыла во время дозировки; рельсовые и шпальные щетки снабжены электроприводом; в связи с увеличением нагрузки на тележку 15 вместо двухосной применена четырехосная тележка; для улучшения условий работы бригады машины увеличена кабина центрального поста 3 и установлен пост 2 управления дозатором 16.
Электробалластер ЭЛБ-3М состоит также из двух шарнирно сочлененных ферм9 (ферма №1) и 17 (ферма №2), на которых смонтированы все рабочие органы.Ферма № 2 опирается на двухосную тележку 18 и четырехосную тележку 15, аферма № 1 - на двухосную тележку 7 и междуферменный шарнир 14.
На ферме № 1 расположены кронштейн междуферменного шарнира 14,
Электромагнитный подъемник 13, балластерные рамы 12, механизмы сдвига пути 11 и подъема пути 4. У электромагнитного подъемника имеются р ельсовые захваты 10, предназначенные для страховочного удержания поднятой путевой решетки при зарядке струнок и подъемке мостов. Перед тележкой № 1 установлены шпальные и рельсовые щетки 8. В хозяйственной будке 6 размещается бригада во время транспортирования машины и хранится инструмент для обслуживания механизмов электробалластера и ухода за ними. На центральном посту управления 3 находятся приборы и аппараты для управления электромагнитным подъемником и балластерными рамами. На ферме № 2 расположены кронштейн междуферменного шарнира 14, дозатор двустороннего действия 16, машинное отделение 1 и пост 2 управления дозатором. Вдоль обеих ферм установлены перила 5.
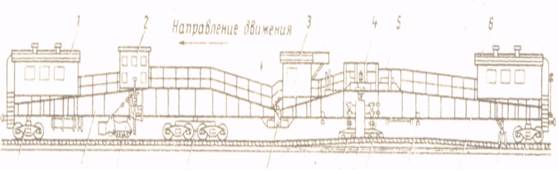
Рисунок 3-Электробалластер
Дозатор предназначен для дозировки балласта, выгруженного на путь перед машиной, а также для оправки балластной призмы и нарезки в междупутье траншеи, облегчающей проход по нему вибрационных уплотнительных плит. При выгрузке балласта на путь из хопперов-дозаторов, как правило, нет необходимости в дополнительной дозировке. Дозатор ВПО-3000 выполнен по типу дозатора электробалластера ЭЛБ-1, изменена лишь конструкция поворотного устройства крыльев, а основная часть крыла снабжена съемным плужком, необходимым для нарезки траншеи в междупутье.
Планировщики откосов
Они предназначены для подбора с обочины земляного полотна балласта, обрушенного основными уплотнительными плитами и обратной укладки его на откос, придания последнему проектного очертания, а также для засыпки в междупутья траншеи, образовавшейся при проходе уплотнительной плиты. Планировщик откосов состоит из крыльев, механизмов их наклона и подъема, а также телескопических распорок раскрытия крыльев.
Крыло планировщика откосов (рисунок 4) состоит из корня 5, планировочного крыла 5, секторного ножа 6, подкрылка 7, закрылка 8 и распорной тяги 4.
Планировочное крыло аналогично крылу дозатора, но имеет вырез для планировки откоса балластной призмы. Механизм наклона крыла планировщика откосов 2 предназначен для регулирования величины заглубления и положения крыла в процессе работы машины. Он установлен на корне крыла и по конструкции аналогичен механизму наклона крыла дозатора электробалластера ЭЛБ-1. Крайние положения крыла ограничены конечными выключателями.
Механизм подъема крыла планировщика 1 предназначен для опускания и подъема крыла при приведении его в рабочее и транспортное положения, а также при изменении режима его работы.
Он состоит из типового червячного редуктора, соединенного с электродвигателем привода. Втулка 9 закреплена свободно на ходовом винте редуктора и от поворота защищена направляющими, скользящими по продольному пазу колонны.
Подъем и опускание крыла осуществляются вращением ходового винта редуктора через втулку 9, которая контрится при фиксированном п о-ложении крыла планировщика.
Механизм поворота крыла планировщика откосов предназначен для изменения угла его открытия при переходе на другой режим работы машины и для приведения крыла в рабочее и транспортное положения.
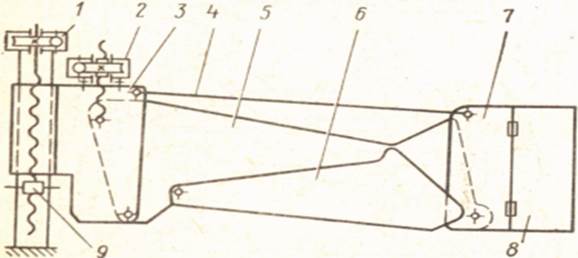
Рисунок 4- Крыло планировщика откосов
Дозатор, выполнен по типу дозатора электробалластера ЭЛБ-3МК, но с некоторыми конструктивными изменениями.
Дата: 2019-05-28, просмотров: 341.