Концепция PLC/ SCADA-систем была выработана в поисках спо-
собов организации управления на распределенных предприятиях,
занимающихся добычей, транспортировкой нефти и газа, доставкой
электроэнергии и т. п., и отличалась преобладанием дискретного
управления. Распределенные системы управления (РСУ) изначально
были ориентированы на задачи обрабатывающей промышленности,
в которых преобладали задачи непрерывного управления, что требо-
вало больших вычислительных ресурсов и более сложных и дорогих
компонентов систем автоматизации. Однако с ростом вычислитель-
ной мощности микропроцессоров возможности PLC значительно
выросли и области применения обеих систем пересеклись. Управ-
ляющие системы на базе PLC/SCADA по функциональности при-
ближаются к РСУ, например, включают локальное управление с
обратной связью, оптимизацию технологических процессов и анализ
данных. В свою очередь, предлагаемые РСУ трудноотличимы от их
SCADA-аналогов.
Для большинства РСУ характерна трехуровневая модель построе-
ния.
На нижнем уровне, уровне ввода/вывода, располагаются полевые
приборы (датчики, сенсоры, исполнительные механизмы), которые
с помощью электрических кабелей подключаются к подсистеме по-
левого ввода/вывода (IO), которая состоит из аппаратных модулей
ввода/ вывода.
На среднем уровне находятся контроллеры (CPU). На этом уров-
не решаются задачи, совпадающие с задачами PLC по обработке
поступающей из подсистемы ввода/вывода информации, и выдача
обратно управляющих воздействий. Для решения сложных задач
контроллеры могут обмениваться между собой данными, используя
цифровые коммуникационные сети, например Industrial Ethernet.
В РСУ применяется полное резервирование модулей, в том числе и
питания. Пара контроллеров, синхронно выполняющих одну и ту же
программу управления и страхующих друг друга, называется «резер-
вированной парой».
Верхний уровень — это уровень операторского управления, объ-
единяющий серверы и операторские рабочие станции, и выполняю-
щий функции, сходные со SCADA-системами. Часто в системе вы-
деляют инженерную станцию ES {engineering station). На ней уста-
навливаются программные средства разработки, с помощью которых
технический специалист может централизованно вносить изменения
и дополнения в конфигурацию системы. Часто ES дополняют рас-
ширенными средствами диагностики состояния системы.
В отличие от PLC/SCADA в РСУ все три уровня обычно выпол-
няются на оборудовании одного производителя и программируются
в одной единой системе. РСУ-система управления отличается высокой
децентрализацией обработки данных, при этом часть задач управле-
ния может быть вынесена даже на уровень датчиков и исполнительных
механизмов и оставаться работоспособной в отрыве от контроллер-
ного уровня.
Сферы применения РСУ многочисленны: нефте- и газоперера-
ботка, химия, нефтехимия, энергоснабжение, металлургия и т.п.
Программные продукты класса РСУ широко представлены на
мировом рынке. Наиболее популярные из них: DeltaV {Emerson
Process Managment); I/A Series {Foxboro); CENTUM CS 3 000
{Yokogawa).
Промышленные сети передачи данных
Понятие промышленной сети, ее основные
Характеристики
Промышленные сети передачи данных — это базовый элемент для
построения современных АСУ ТП. Появление промышленных ком-
муникационных протоколов положило начало внедрению террито-
риально распределенных систем управления, способных охватить
множество технологических установок, объединить целые цеха, а
иногда и заводы. Промышленные сети обеспечивают информацион-
ные потоки между контроллерами, датчиками и разнообразными
исполнительными механизмами. Именно коммуникационные сети в
большой степени определяют качество и надежность функциониро-
вания АСУ ТП в целом. Промышленная сеть — это среда передачи
данных, набор стандартных протоколов обмена данными, позволяю-
щих связать воедино оборудование различных производителей, а
также обеспечить взаимодействие нижнего и верхнего уровней
АСУ.
Устройства, подключенные к сети, используют ее для следующих
целей: 1) передачи данных между датчиками, контроллерами и ис-
полнительными механизмами; 2) диагностики и удаленного конфи-
гурирования датчиков и исполнительных механизмов; 3) калибровки
датчиков; 4) питания датчиков и исполнительных механизмов; 5) пере-
дачи данных между датчиками и исполнительными механизмами,
минуя центральный контроллер; 6) связи между датчиками, испол-
нительными механизмами, ПЛК и верхним уровнем АСУ ТП; 7) связи
между контроллерами и системами человекомашинного интерфейса
(операторскими системами).
Средой передачи данных в промышленных сетях могут быть ка-
бели, оптоволоконные линии или беспроводная связь (радиомодемы
и Wi-Fi).
Наиболее значимыми параметрами промышленных сетей являют-
ся топология сети, объем информационного сервиса, предоставляе-
мого сетью, и способ доступа к физическому каналу передачи дан-
ных.
Сетевая топология означает способ (тип) сетевого объединения
различных устройств. Существует несколько топологий, отличаю-
щихся друг от друга по трем основным критериям: режим доступа к
сети; средства контроля передачи и восстановления данных; возмож-
ность изменения числа узлов сети. Эти топологии называются: общая
шина, кольцо и звезда. В топологии звезда вся информация пере-
дается через некоторый центральный узел, так называемый обраба-
тывающий компьютер. Каждое устройство имеет свою собственную
среду соединения. Все периферийные станции могут обмениваться
друг с другом только через центральный узел. Это обеспечивает до-
полнительную защиту всей сети от выхода из строя или отключения
узлов, позволяет существенно оптимизировать трафик, передавая
пакеты только в те лучи, где находятся их получатели. С другой сто-
роны, центральный узел должен быть исключительно надежным
устройством как в смысле логического построения сети (отслежива-
ние конфликтных ситуаций и сбоев), так и физического, поскольку
каждое периферийное устройство имеет свой физический канал
связи и, следовательно, все они должны иметь одинаковые возмож-
ности доступа. Дополнительное устройство может быть включено в
сеть только в том случае, если есть свободный порт для его подсоеди-
нения к центральному узлу. В кольцевой структуре информация пере-
дается от узла к узлу по физическому кольцу. Приемник копирует
данные, регенерирует их и вместе со своей квитанцией подтверждения
передает следующему устройству в сети. Когда начальный передатчик
получает свою собственную квитанцию, это означает, что его инфор-
мация была корректно получена адресатом. В кольце не существует
определенного централизованного контроля. Каждое устройство по-
лучает функции управляющего контроллера на строго определенный
промежуток времени. Достоинством топологии являются предска-
зуемость и высокая пропускная способность, а недостатками — вы-
сокая стоимость организации канала связи, в большинстве случаев
нерациональное использование сетевого трафика и невысокая на-
дежность: отказ в работе хотя бы одного узла приводит к нарушению
работы кольца, а следовательно, и к остановке всех передач. Самым
распространенным типом является общая шина. В любой шинной
структуре все устройства подсоединены к общей среде передачи дан-
ных, или шине. В отличие от кольца адресат получает свой инфор-
мационный пакет без посредников. Подключение дополнительных
узлов к шине не требует аппаратных доработок со стороны уже ра-
ботающих узлов сети, как это имеет место в случае топологии «звез-
да». Шинная топология требует жесткой регламентации доступа к
среде передачи. Используется как централизованный, так и децен-
трализованный контроль шины. Основными преимуществами общей
шины являются простота и дешевизна, легкость переконфигуриро-
вания, возможность подключения или отключения устройств во
время работы, применимость для сильно распределенных объектов.
К недостаткам следует отнести присутствие в каждой точке сети обще-
го трафика и опасность потери связи при одиночном обрыве канала
связи.
Информационный сервис, предоставляемый сетью, в соответствии
с моделью Международной организации по стандартизации (ISO/OS1)
имеет семь уровней. На физическом уровне определяются физические
характеристики канала связи и параметры сигналов, т. е. он обеспе-
чивает необходимые механические, функциональные и электрические
характеристики для установления, поддержания и размыкания фи-
зического соединения. Канальный уровень формирует основную
единицу передаваемых данных — пакет — и отвечает за дисциплину
доступа устройства к каналу связи и установление логического соеди-
нения. Он гарантирует передачу данных между устройствами, управ-
ляет не только сетевым доступом, но и механизмами защиты и вос-
становления данных в случае ошибок при передаче. Сетевой уровень
отвечает за адресацию и доставку пакета по оптимальному маршруту.
Транспортный уровень разбирается с содержимым пакетов, форми-
рует ответы на запросы или организует запросы, необходимые для
уровня сессий. Уровень сессий оперирует сообщениями и координи-
рует взаимодействие между участниками сети. Уровень представления
занимается преобразованием форматов данных, если это необходимо.
Прикладной уровень — это набор интерфейсов, доступных програм-
ме пользователя, он обеспечивает непосредственную поддержку
прикладных процессов и программ конечного пользователя и управ-
ление взаимодействием этих программ с различными объектами сети
передачи данных. Большинство промышленных сетей ограничива-
ется тремя уровнями: физическим, канальным и прикладным.
Тип доступа к физическому каналу определяет регламент исполь-
зования отдельными устройствами общей линии связи. Существуют
два метода упорядоченного доступа: централизованный и децентра-
лизованный. В случае централизованного доступа к шине выделяется
узел с правами «Мастера», который назначает и отслеживает порядок
и время доступа к шине для всех других участников. При выходе его
из строя циклы обмена по шине останавливаются. Именно по этой
причине наибольшее распространение получил децентрализованный
доступ с переходящими функциями мастера от одного участника (узла
сети) к другому. Во всем мире широко приняты и используются две
модели децентрализованного доступа: с коллизиями и без коллизий.
Доступ к каналу с коллизиями (недетерминированный, или множе-
ственный, доступ) используют, например, сети Ethernet и CAN. В этом
случае все станции на шине имеют право передавать данные. Каждая
из них постоянно прослушивает шину. Если шина свободна, любой
из участников сети может занять шину под свой цикл передач. В том
случае, когда несколько станций претендуют на шину одновременно,
это приводит к так называемому конфликту (коллизии). Для разреше-
ния коллизий применяются различные приемы. Например, в сетях
Ethernet используется технология, основанная на постоянном про-
слушивании линии всеми узлами и генерации повторной попытки
занятия канала через случайный промежуток времени в случае, если
обнаружена попытка одновременного доступа к каналу нескольких
узлов. Принципиально другую форму разрешения коллизий исполь-
зует CAN-протокол, в котором разрешение коллизий производится
аппаратурой по принципу побитового сравнения сетевых адресов
конфликтующих устройств (рис. 14.1, а). Станция № 2, пытающаяся
передать очередную «единицу» из своего адреса, видит, что в канале
передается «ноль», понимает, что конфликтует, и откладывает по-
пытку занять канал на некоторое время, а станция № 1 продолжает
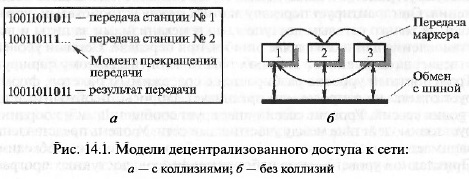
передачу. Коллизии хотя и возникают, но разрешаются предсказуемо
и в предсказуемое время. Существуют сетевые протоколы, в которых
аргументами в споре за канал являются не сетевые адреса, а динами-
чески изменяемые приоритетные уровни пакетов. Это позволяет
пакету, несущему важную информацию и требующему немедленного
ответа, легко пробиться через поток низкоприоритетных информа-
ционных обменов. Недетерминированный доступ позволяет эффек-
тивно использовать пропускную способность канала и предоставлять
доступ в сеть нескольким активным узлам, но его эффективность
снижается при увеличении общей загрузки шины выше 30 %.
Основная масса промышленных сетевых протоколов использует
доступ без коллизий (детерминированный) по принципу «запрос —
ответ» или с помощью передачи маркера, обеспечивающий четкое и
ритмичное сетевое взаимодействие. В основе протоколов с передачей
маркера лежит принцип постоянного наличия в сети синхронизи-
рующего пакета, называемого маркером. Маркер, т. е. право на доступ
к шине, передается в цикле от устройства к устройству (рис. 14.1, б).
Порядок передачи зависит от прикладной задачи и определяется на
стадии планирования системы. Принцип передачи маркера исполь-
зуется в распределенных системах, где реакция на возникающие со-
бытия должна проявляться за определенное время.
В целом по сравнению с подключением периферийного оборудо-
вания к контроллеру отдельными проводами промышленная сеть
имеет следующие достоинства: 1) в несколько раз снижается расход на
кабель и его прокладку; 2) увеличивается допустимое расстояние до
подключаемых датчиков и исполнительных устройств; 3) упрощается
управление сетью датчиков и исполнительных механизмов; 4) упро-
щается модификация системы при изменении типа датчиков, исполь-
зуемого протокола взаимодействия, добавлении устройств ввода/вы-
вода; 5) обеспечиваются дистанционная настройка и диагностика
датчиков. В качестве недостатков промышленной сети необходимо
отметить следующее. При обрыве кабеля теряется возможность по-
лучать данные и управлять не одним, а несколькими устройствами
(в зависимости от места обрыва и топологии сети остается возможность
автономного функционирования сегмента сети и схемы управления).
Как следствие, для повышения надежности приходится резервировать
каналы связи или использовать кольцевую топологию сети.
Дата: 2019-04-23, просмотров: 339.