Регулирования
Система автоматического регулирования оценивается устойчивостью,
точностью в установившихся режимах и качеством переходных процес-
сов. Необходимо также, чтобы переходные процессы затухали достаточ-
но быстро с допустимыми отклонениями регулируемой величины.
Оценки качества регулирования могут быть прямыми и косвен-
ными, а также статическими и динамическими. Динамические
оценки характеризуют переходной процесс, а статические — устано-
вившийся режим.
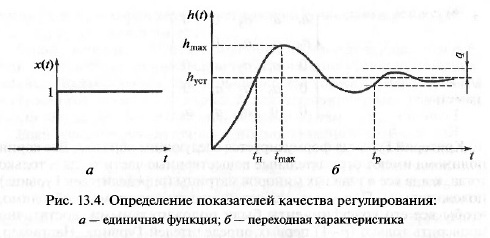
При непосредственном определении качества регулирования на
вход системы подают тестовый сигнал. В качестве тестового сигнала
обычно используют так называемый «единичный скачок» (единичную
функцию), т. е. мгновенное изменение входного сигнала с 0 до 1 в
момент времени t = 0 (рис. 13.4, а). Единичная функция определяет-
ся как
Реакция (выходной сигнал) системы на единичный скачок назы-
вается переходной характеристикой (рис. 13.4, 6) и обозначается
h(t). По переходной характеристике определяются основные показа-
тели качества:
1) время регулирования t p — интервал времени, по истечении
которого отклонение переходной характеристики от установившего-
ся значения не превышает некоторой заданной величины q. Значение
q выбирают обычно равным 5 или 2 % от установившегося значения
2) перерегулирование — разность между максимальным значени-
ем h mm переходной характеристики и ее установившимся значением,
выраженная в процентах от установившегося значения:

В большинстве случаев требуется, чтобы перерегулирование не
превышало 10...30%;
3) колебательность — число колебаний за время регулирования;
допускается не более 2...3 колебаний;
4) статическая ошибка

где х — задание; hуС| — установившееся значение регулируемого па-
раметра.
Если принять, что х = 1, статическая ошибка равна ∆ = 1 — hуст.
Кроме этих параметров по графику переходной характеристики
определяют время нарастания переходного процесса t H и время до-
стижения первого максимума / тах .
Существует две разновидности интегральной оценки качества САР.
Интегральная абсолютная ошибка регулирования определяется
следующим выражением:

Эта оценка может быть применена только при монотонных пере-
ходных процессах при отсутствии колебаний. Интегральная квадра-
тичная оценка применяется как при монотонных, так и при коле-
бательных переходных процессах и определяется следующим соот-
ношением:

Недостаток квадратичной интегральной оценки заключается в том,
что различные по характеру переходные процессы могут иметь одну
и ту же величину оценки.
Наряду с прямыми показателями качества, определяемыми по
переходной характеристике, используются косвенные показатели, в
частности корневые оценки качества.
Многие свойства системы можно предсказать, посмотрев на рас-
положение корней характеристического полинома на комплексной
плоскости. Прежде всего все корни для устойчивой системы должны
находиться в левой полуплоскости, т. е. слева от мнимой оси.
Быстродействие системы определяется степенью устойчиво-
сти η — так называется расстояние от мнимой оси до ближайшего
корня (или пары комплексно-сопряженных корней). Этот корень
называется доминирующим, он определяет самые медленные движе-
ния в системе и время переходного процесса, которое может быть
примерно рассчитано по формуле

Степень устойчивости, несмотря на название, ничего не говорит
о близости системы к границе устойчивости, она только характери-
зует быстродействие.
Параметр, определяющий скорость затухания колебаний в систе-
ме, называется колебательностью. Колебательность ц для пары
комплексно-сопряженных корней α ± jβ вычисляется как отношение
мнимой и вещественной части корня (по модулю):

Чем больше эта величина, тем слабее затухают колебания, вы-
званные этими корнями, за один период колебаний.
При проектировании систем обычно требуется обеспечить бы-
стродействие не ниже заданного (степень устойчивости не меньше
заданной η mjn) и колебательность не выше заданной μтах.
1. Назовите основные принципы управления.
2. Какой принцип управления используется в САР?
3. Как классифицируются САР?
4. Назовите основные законы регулирования.
5. Охарактеризуйте понятие «передаточная функция».
6. Как определяются амплитудно- и фазочастотная характеристики?
7. Назовите основные типовые звенья динамических систем.
8. Какая обратная связь является отрицательной, а какая — положитель-
ной?
9. Объясните критерий Гурвица.
10. Как определяется переходная характеристика?
11. Назовите основные показатели качества САР.
Гл а в а 14
Дата: 2019-04-23, просмотров: 399.