Любая система, в том числе и САР, состоит из элементов (звеньев).
Для получения модели системы необходимо определить модели ее
элементов. Элементы и сама система характеризуются входом (вхо-
дами) x(t) и выходом (выходами) y(t). Входы независимы, они «при-
ходят» из внешней среды. При изменении информации на входе
меняется внутреннее состояние объекта (так называют его изменяю-
щиеся свойства) и, как следствие, выходы. Построить модель — это
значит найти оператор, связывающий входы и выходы. С его помо-
щью можно предсказать реакцию объекта на любой входной сигнал.
Для упрощения моделей делают следующие допущения: 1) система и
ее элементы обладают свойством стационарности; 2) элементы си-
стемы являются линейными; 3) протекающие процессы являются
непрерывными функциями времени при выполнении нулевых на-
чальных условий.
Математические модели могут быть получены теоретически из
законов физики (законы сохранения массы, энергии, импульса). Эти
модели описывают внутренние связи в объекте и, как правило, наи-
более точны. В общем случае физическая модель линейной системы
описывается дифференциальным уравнением следующего вида:

где а„ bj — постоянные коэффициенты, зависящие от параметров
системы.
Применим к левой и правой части преобразование Лапласа, счи-
тая, что все начальные условия нулевые:
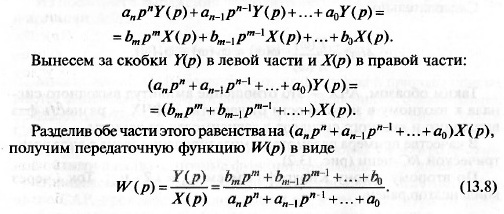
Таким образом, передаточная функция равна отношению изо-
бражений по Лапласу выходного и входного сигналов при нулевых
начальных условиях.
Передаточная функция является основной математической моде-
лью, полностью описывающей динамические свойства элемента или
системы. На основе передаточной функции можно получить ряд
частных характеристик системы, исследовать на устойчивость и т.д.
В реальных условиях очень часто на вход системы поступают гар-
монические сигналы. Для определения реакции системы на воздей-
ствие гармонических входных сигналов пользуются амплитудно-
фазовой характеристикой (АФХ), которую получают путем замены в
передаточной функции оператора р на jω
 .
.
АФХ представляет собой комплексное выражение, имеющее со-
ответственно амплитуду и фазу:

где Р и Q — вещественная и мнимая части АФХ (при условии

Функция A(iо) называется амплитудно-частотной характери-
стикой (АЧХ), а φ(ω) — фазочастотной характеристикой (ФЧХ).
Чтобы выяснить физический смысл АЧХ и ФЧХ, преобразуем
выражение для АФХ в показательную форму:
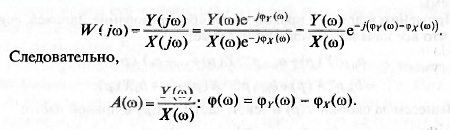
Таким образом, АЧХ — это отношение амплитуд выходного сиг-
нала к входному в зависимости от частоты, а ФЧХ — разность фаз
выходного и входного сигналов в зависимости от частоты.
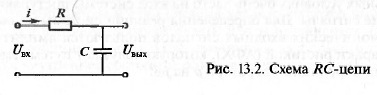
В качестве примера рассмотрим моделирование звена в виде элек-
трической ЛС-цепи (рис. 13.2).

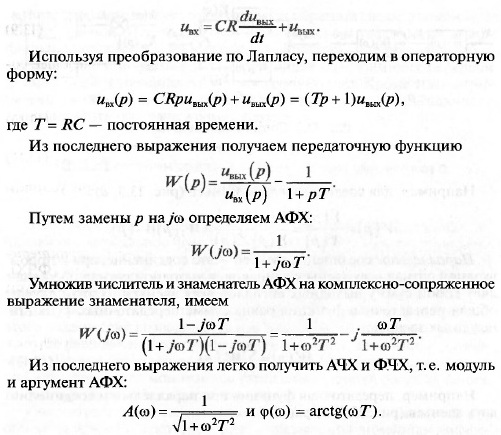
Следовательно, дифференциальное уравнение этого звена запи-
шется в виде
Многие звенья САР независимо от их физической природы описы-
ваются одинаковыми дифференциальными уравнениями, следовательно,
обладают одинаковыми динамическими свойствами. Простейшие звенья
САР, моделируемые дифференциальными уравнениями не выше второ-
го порядка, называются типовыми. Модели типовых звеньев во времен-
ной области и их передаточные функции приведены в приложении 3.
Определение передаточной функции сложной системы, в том
числе САР, производится следующим образом. Структура системы
разбивается на элементы (звенья), передаточные функции которых
либо известны, либо легко определяются. Затем последовательно
объединяют звенья и определяют передаточные функции объединен-
ных звеньев в зависимости от типа их соединения — последователь-
ного, параллельного и с обратной связью.
Последовательное соединение звеньев — это соединение, при
котором выходной сигнал предыдущего звена является входным сиг-
налом для последующего. При таком соединении п звеньев переда-
точная функция объединенного звена равна произведению переда-
точных функций исходных звеньев:


Параллельное соединение звеньев — это соединение, при котором
входной сигнал всех звеньев одинаков, а выходной сигнал представ-
ляет собой сумму выходных сигналов всех звеньев. В этом случае
общая передаточная функция равна сумме передаточных функций
исходных звеньев:

Например, передаточная функция при параллельном соединении
двух звеньев (рис. 13.3, б) равна

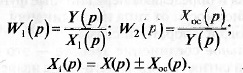
Под обратной связью понимают передачу сигнала с выхода звена
на его вход (рис. 13.3, в). Звено W x (p) называется прямой цепью, а
W 2 (p) — обратной цепью. Различают положительную и отрицатель-
ную обратные связи. Если Х { (р) - Х(р) - Х ос (р), обратная связь от-
рицательная, а при Х х (р) = Х(р) + Х ос (р) — положительная. Для
определения общей передаточной функции запишем передаточные
функции исходных звеньев:
Исключая из этих выражений Х ос (р) к Х х {р), находим передаточную
функцию звена, охваченного обратной связью:
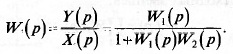
Знак «+» соответствует отрицательной обратной связи, а знак «-» —
положительной. Положительная обратная связь увеличивает коэф-
фициент передачи и уменьшает полосу пропускания прямой цепи, а
отрицательная обратная связь уменьшает коэффициент передачи
прямой цепи и увеличивает полосу пропускания. Кроме того, отри-
цательная обратная связь способствует повышению стабильности
коэффициента передачи прямой цепи.
Дата: 2019-04-23, просмотров: 369.