Принцип работы токоприемника поясняется рис. 1. Основание токоприемника несет на себе нижние рамы 2, валы 1 которых поворачиваются в подшипниках. С нижними рамами шарнирно соединены верхние рамы 3. В верхней части эти рамы соединены между собой и с кареткой 5, с которой связаны полозы 4, скользящие по контактному проводу.
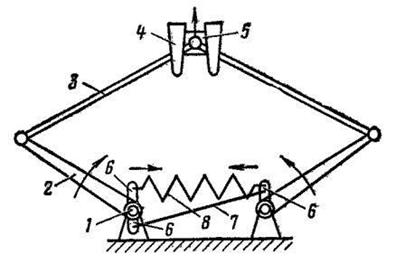
Рисунок 1 – Принцип работы токоприемника
Валы 1 поворачиваются под действием пружины 8, которая, стремясь сжаться, передает усилие на ушки 6, поднимает рамы и создает нажатие на контактный провод. Синхронность поворота обоих валов и работу рам без перекосов обеспечивает тяга 7, соединенная с ушками 6.
Токоприемник П-5 состоит из таких основных элементов: основания 1, нижних 2 и верхних 18 рам, лыж 20 с контактными пластинами 19, кареток 21 (рис. 6.17, рис. 6.18), поднимающих пружин 3, пневматического цилиндра привода 4 с опускающими пружинами, расположенными в полости цилиндра, редукционного устройства 13 (рис. 6.16).
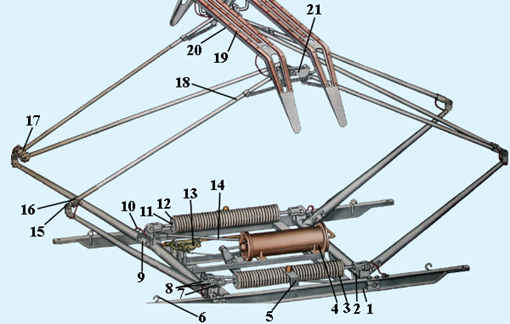
Рис. 6.16. Токоприемник Т-5М1 (П-5):
1 — основание токоприемника; 2 — главный вал; 3 — пружина; 4 — цилиндр привода; 5 — кронштейн с амортизатором; 6 — скоба; 7 — шарнир; 8 — рычаги; 9 — скоба; 10 — медный шунт; 11 — гайка; 12 — пружинодержатель; 13 — редукционное устройство; 14 — синхронизирующие тяги; 15 — шарнир; 16 — хомут; 17 — хомут верхней рамы; 18 — верхняя рама; 19 — токосъемная накладка; 20 — полоз (лыжа); 21 — каретка

Рис. 6.17. Клещевидная каретка токоприемника П-5

Рис. 6.18. Каретка токоприемника П-1Б
Основание токоприемника сварной конструкции выполнено из швеллеров и уголков. На основании расположены цилиндр пневматического привода 4 и редукционное устройство 13. Нижние рамы, выполненные из конических труб и вала, шарнирно закреплены в основании. Верхние рамы 18, выполненные из тонкостенных цилиндрических труб, шарнирно соединены с нижними рамами и удерживают на себе каретки 21, на которых расположены лыжи 20 20 (рис. 6.19).

Рис. 6.19. Общий вид токоприемника 10РР2 и вилитового разрядника в защитном кожухе электровоза ЧС2
Синхронизация поворота валов нижних рам обеспечивается при помощи тяг 14, шарнирно закрепленных в ушках валов нижних рам, а минимальная высота опускания лыж от контактной сети ограничивается кронштейнами 5 с резиновыми амортизаторами.
Подъем токоприемника происходит за счет подачи сжатого воздуха в цилиндр пневматического привода 350÷500 кПа (рис. 6.20).
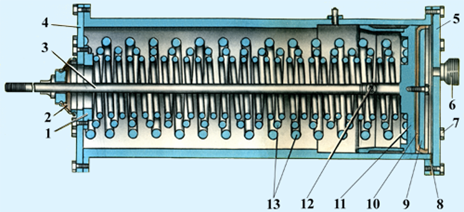
Рис. 6.20. Цилиндр пневматического привода:
1 — упор пружины; 2 — защитный чехол; 3 — шток поршня; 4 — передняя крышка; 5 — задняя крышка; 6 — штуцер; 7 — болт крышки; 8 — прокладка; 9 — нажимная шайба; 10 — манжета; 11 — поршень; 12 — ось; 13 — пружина
Поршень 11 сжимает опускающие пружины 13, расположенные в цилиндре, а поднимающие пружины, которые находятся в растянутом состоянии, срабатывают (рис. 6.20). Шарнирно соединенные с поднимающими пружинами нижние рамы 2 поворачиваются и обеспечивают подъем верхних рам 18 вместе с каретками 21 и лыжами 20.
В зоне рабочей высоты подъема лыж токоприемника опускающие пружины (рис. 6.20) полностью сжаты — и давление лыж на контактный провод определяется только усилием поднимающих пружин.
Опускание токоприемника происходит при выходе сжатого воздуха из цилиндра пневматического привода, в результате чего опускающие пружины (распрямляясь) компенсируют усилия поднимающих пружин.

Рис. 6.21. Гибкий диэлектрический рукавчик токоприемника 10РР2
Каретки с лыжами удерживаются в горизонтальном положении оттягивающими пружинами, которые способствуют повороту узла крепления лыж вокруг поперечной оси токоприемника, а каждая лыжа, в свою очередь, может самостоятельно поворачиваться относительно его продольной оси на 5÷7°.
Контактное давление регулируется путем изменения натяжения поднимающих пружин, поворачивая их на держателях; высоту максимального подъема регулируют специальной гайкой на пневматическом цилиндре привода, что ограничивает ход штока поршня 3.
Время подъема и опускания регулируется при помощи редукционного устройства, которое состоит из крана 9 и воздухораспределителя 1. Ручка 8 крана с тягой 7 связана рычагом 5 штока пневматического цилиндра 3. Изменяя с помощью болтов 4 длину тяги 7, регулируют время опускания токоприемника; таким образом, удлинняя тягу, — ускоряют, а укорачивая тягу, — уменьшают скорость опускания токоприемника. Подъем токоприемника регулируют с помощью специального винта воздухораспределителя. В опущенном токоприемнике кран 9 редукционного устройства закрыт — и воздух в цилиндр 3 поступает через регулировочное отверстие 2 воздухораспределителя — токоприемник поднимается сравнительно медленно. Рычаг при движении перемещает ручку крана, который открывается в момент соприкосновения лыж с контактным проводом.
В момент опускания токоприемника часть воздуха из цилиндра выходит через открытый кран, в результате чего он опускается быстро, предотвращая возникновение электрической дуги в месте контакта лыжи с проводником контактной сети. В случае прохождения наименьшей рабочей высоты кран перекрывается, и остаток воздуха из цилиндра выходит через регулировочное отверстие воздухораспределителя. Тогда токоприемник медленнее опускается каретками на кронштейны с амортизаторами.
Снятие характеристик статического давления выполняют в соответствии с ГОСТ 12058-72 на каждом ТО-3, а также на периодических ремонтах.
Дата: 2019-04-23, просмотров: 549.