Конструкция двигателя с параллельным возбуждением практически не отличается от генератора с параллельным возбуждением. Обмотку главных полюсов присоединяют к обмотке якоря параллельно - она называется параллельной или шунтовой. При этом на полюсах располагается также дополнительная обмотка, соединяемая с обмоткой якоря последовательно - она называется последовательной или сериесной (стабилизирующей) обмоткой.
Сопротивление цепи якоря  состоит из сопротивления обмотки якоря Ra, сопротивления обмотки дополнительных полюсов RД и переходного сопротивления щёточного контакта RЩ . Величина определяется при холодном состоянии обмоток с использованием метода амперметра - вольтметра по схеме, приведенной на рис.5.1.
состоит из сопротивления обмотки якоря Ra, сопротивления обмотки дополнительных полюсов RД и переходного сопротивления щёточного контакта RЩ . Величина определяется при холодном состоянии обмоток с использованием метода амперметра - вольтметра по схеме, приведенной на рис.5.1.
При проведении измерений резистором RОГР в цепи якоря устанавливается номинальный ток IН и производится отсчёт напряжения U.
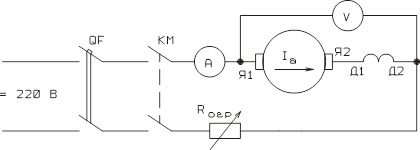 |
Рис.5.1. Схема измерения сопротивления цепи якоря
Сопротивление цепи якоря , Ом, вычисляется по закону Ома: = U / I Н .
Сопротивление щёточного контакта RЩ , Ом, определяется по формуле
RЩ = 2·ΔUЩ/IН,
где ΔUЩ принимается равным 1В.
Сопротивление последовательно соединённых обмоток якоря и дополнительных полюсов RЩ , Ом, определяется из выражения
 .
.
Приведение величины RaД к расчётной температуре t производится по формуле
 ,
,
где t = 750С для изоляции классов A, E, B;
t = 1150С для изоляции классов F и H;
t0 - температура окружающего воздуха при измерениях.
Схема для исследования двигателя постоянного тока с параллельным возбуждением приведена на рис.5.2.
Принятые на схеме обозначения:
Я1, Я2 - выводы обмоток якоря;
Д1, Д2 - выводы обмотки дополнительных полюсов;
Ш1, Ш2 - выводы параллельной обмотки возбуждения;
С1, С2 - выводы последовательной обмотки возбуждения (включаются в схему только при снятии скоростных характеристик);
RП, RРВ - пусковой и регулировочный реостаты;
Y - диск электромагнитного тормоза;
ОВ - обмотка возбуждения электромагнитного тормоза;
VD - выпрямительный мост;
Т - лабораторный автотрансформатор;
SA - выключатель;
КМ1 - контактор постоянного тока;
КМ2 - магнитный пускатель;
QF1, QF2 - автоматические выключатели.
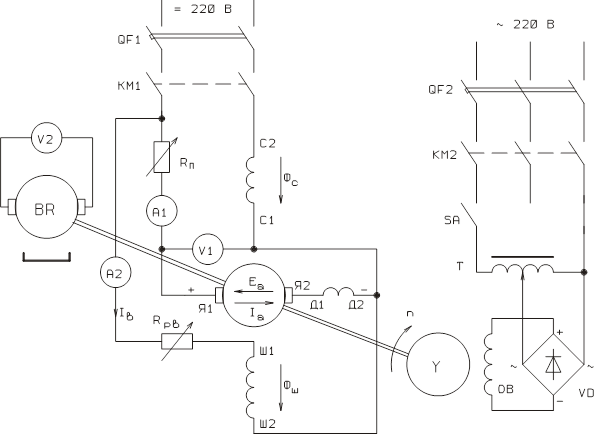 |
Рис. 5.2. Схема исследования двигателя постоянного тока
с параллельным возбуждением
Резисторы RП , RРВ подобраны в соответствии с тем, что сопротивление цепи якоря составляет единицы Ом, а сопротивление обмотки возбуждения - сотни Ом. Поэтому сопротивление резистора RРВ подбирается порядка 100 Ом, что в 5-10 раз больше, чем сопротивление параллельной обмотки возбуждения.
В первый момент пуска якорь двигателя неподвижен (n=0). Следовательно, ЭДС якоря Е тоже равна нулю. Ввиду малости сопротивления  ток при пуске может превышать номинальный ток обмотки якоря IН, примерно, в 7-15 раз. Для ограничения пускового тока в цепь якоря включается пусковой резистор RП , сопротивлене которого подбирается такой величины, чтобы ток при пуске
ток при пуске может превышать номинальный ток обмотки якоря IН, примерно, в 7-15 раз. Для ограничения пускового тока в цепь якоря включается пусковой резистор RП , сопротивлене которого подбирается такой величины, чтобы ток при пуске 
 не превышал (1,5-2,0) ·IН.
не превышал (1,5-2,0) ·IН.
По мере разгона двигателя ЭДС Е возрастает, ток якоря уменьшается и сопротивление пускового резистора RП постепенно выводят до нуля. Так как вращающий момент двигателя MЭ=сМ·Ia·Ф (где сМ - постоянная, не зависящая от режима работы двигателя), то для обеспечения наибольшего пускового момента пуск производят при наибольшем токе возбуждения, создающим поток Ф. Следовательно, сопротивление RРВ при пуске устанавливают равным нулю.
Следует также иметь в виду, что поток Ф незначительно зависит от тока якоря Ia , вследствие чего двигатель с параллельным возбуждением, в отличие от двигателя с последовательным возбуждением, можно пускать в ход вхолостую.
При работе двигателя без нагрузки на валу, мощность холостого хода Р0 примерно равна сумме механических потерь РМХ и потерь в стали РСТ. Механические потери РМХ зависят только от частоты вращения n, а потери в стали являются функцией n и магнитного потока Ф, т.е. РМХ и РСТ практически не зависят от тока якоря Ia . Поэтому РМХ и РСТ при холостом ходе будут такими же, что и при номинальной нагрузке двигателя, при тех же значениях n и Ф.
Напряжение холостого хода U0 , при котором магнитный поток Ф будет такой же величины, как и при номинальной нагрузке, можно приближённо вычислить по формуле
U 0 = U - I Н · Ra Д t ,
где U - номинальное напряжение двигателя.
Для экспериментального определения Р0 = РМХ + РСТ , устанавливают номинальную частоту вращения якоря (реостатом в цепи возбуждения RРв ) и расчётное напряжение U0 (реостатом в цепи якоря RП). Фиксируют ток якоря I0 , ток возбуждения Iв и рассчитывают мощность холостого хода по формуле P0=U0 ·I0.
Дата: 2019-03-05, просмотров: 392.