Содержание методов исследования движений определяется, с одной стороны, совокупностью параметров, характеризующих процесс реализации движения, а с другой — способами регистрации этих параметров.
Выделение комплекса параметров, описывающих процесс реализации движения, связано в первую очередь с выбором определенной концептуальной модели, описывающей работу двигательной системы (биомеханическая модель, физиологическая модель нервно-мышечного аппарата и др.). Осознание этого обстоятельства позволяет наметить подход к классификации методов исследования движений. Так, кинематические (характеристики пространственного перемещения) и динамические (силовые) параметры движений и способы их регистрации связаны с разработкой биомеханической модели двигательной системы, а электромиографические методы исследования обязаны своим существованием разработке физиологической модели нервно-мышечного аппарата.
Характеристику методов исследования движений следует начать с циклограммы, которая представляет собой фотосъемку движения на неподвижную пластинку. Для этого на подвижных частях тела испытуемого укрепляются светящиеся метки или электрические лампочки. Перед фотоаппаратом помещается обтюратор с определенной частотой, закрывающий объектив. На фотопластинке фиксируются последовательные положения лампочек, которые перемещаются в процессе выполнения движения вместе с кинематическими звеньями исследуемого тела. Для регистрации сложных циклических действий этот способ не применим. При кимоциклографии фотопленка, на которой фиксируется информация о перемещении лампочек, равномерно и медленно перемещается. В этом случае циклические действия растягиваются на регистрирующей пленке. Описанные методы циклографии и кимоциклографии предназначены для плоскостной регистрации перемещений.
Для исследования пространственных перемещений применяются различные модификации вышеупомянутых методов: стереоскопическая съемка, т. е. съемка двумя объективами с параллельными оптическими осями, съемка объективами с конвергирующими оптическими осями и др. Используется также «зеркальная методика», позволяющая получать снимки объекта с двух различных точек зрения при помощи одного фотоаппарата и одного обтюратора. В объектив фотоаппарата попадают два изображения одного и того же исследуемого объекта: одно—непосредственно от объекта, а второе — отраженное под определенным углом через зеркало. Этот метод обеспечивает большую точность пространственных измерений и удобство анализа экспериментального материала.
Анализ циклограммы является достаточно трудоемким процессом. Для анализа перемещения различных точек тела в пространстве пользуются методами фотопромеров и номограмм.
В первом случае негативы циклограмм печатаются при помощи увеличителя на фотобумаге. Тем же путем на позитив накладывается миллиметровая или полумиллиметровая сетка, что значительно облегчает работу с материалом и повышает точность измерения. Метод номограмм позволяет значительно упростить определение всех трех пространственных координат зеркальных циклофотодокументов.
С помощью метода циклографии можно проводить достаточно тонкий анализ некоторых двигательных актов. Разработана методика циклографирования движений руки при гаптическом (вслепую) прохождении лабиринта, на основании которой удалось дифференцировать ориентировочно-исследовательские движения руки от исполнительных. Пользуясь циклографической регистрацией, в составе осязательных движений руки выделили движения, выполняющие функции построения образа и опознания. В этих случаях движения также регистрировались в одной плоскости.
Существует еще ряд методов, используемых при исследовании различных двигательных задач. К ним следует отнести методы измерения напряженности магнитных и электромагнитных полей, тензометрический, голографический, радиолокационный и др. Метод измерения напряженности магнитных и электромагнитных полей применяется для исследования сравнительно малоамплитудных и угловых перемещений. Тензометрический метод, как и гониографический (о последнем будет более подробно сказано ниже), используется для макро- и микроугловых измерений. Особенно широкое применение получила тензометрическая методика для измерения макроизменений суставного угла при исследовании тремора. Телевизионный, голографический и радиолокационный методы в настоящее время еще не нашли должного развития в области исследования движений. Телевидение используется в основном как индикационное устройство. Это связано с тем, что получение с телесистем пространственных параметров в виде электрических сигналов, удобных для анализа перемещений объекта, представляет определенные трудности. Преодоление последних идет по пути широкого внедрения ЭВМ в область эргономических исследований. Методы голографии и радиолокации используются пока довольно редко, хотя и являются весьма перспективными. Пожалуй, самым удобным и распространенным методом для измерения угловых перемещений является гониография. Гониография, дающая показания об изменениях пространственного положения сочленения кинематической цепи, используется для целей искусственной обратной связи. Однако получение электрических сигналов, адекватных пространственному перемещению конечной точки открытой кинематической цепи, оснащенной гониометрическими датчиками, представляется достаточно сложной технической задачей. Поэтому применение этого метода при исследовании пространственных перемещений изучаемого объекта существенно ограничено.
В арсенал методических средств исследования исполнительной деятельности входят и специальным образом организованные экспериментальные ситуации. Последние включают в себя различные переменные, которые можно рассматривать в качестве существенных условий, определяющих выполнение двигательных задач. Одной из широко распространенных экспериментальных ситуаций, применяемых в исследованиях исполнительной деятельности, является слежение.
Применительно к исследованию исполнительной деятельности человека ситуация слежения может рассматриваться в двух планах: как лабораторная модель различных видов практической деятельности человека (работа оператора РЛС, управление различными транспортными средствами и др.) и как экспериментальный прием решения некоторых теоретических проблем, возникающих при анализе двигательного поведения.
В ситуации слежения испытуемому предлагается совершать движение, параметры которого (скорость, направление, амплитуда, время) должны удовлетворять параметрам движущейся цели, с которой согласуется собственно движение испытуемого. Специфика ситуации слежения (в отличие от «точностной задачи» и задачи «сохранения постоянства» параметров движения) состоит прежде всего в том, что в данном случае двигательное поведение испытуемого жестко детерминировано практически по всем параметрам движения.
Для описания слежения обычно употребляют несколько следующих терминов: задающий или эталонный объект (или «цель») — объект, закон движения которого задается посредством определенной входной функции. Управляемый объект (или «курсор»)—это объект, которым управляет испытуемый, воздействуя на орган управления. В движении управляемого объекта (выходная функция) реализуется двигательное поведение испытуемого в заданной ситуации.
Задача слежения, таким образом, состоит в том, чтобы значение выходной функции точно соответствовало значению входной функции в соответствующий момент времени, а испытуемый должен на основе воспринятой информации выработать корректировочное воздействие, устраняющее рассогласование со значениями входной и выходной функции. В зависимости от того, насколько жестко детерминировано двигательное поведение испытуемого и какую информацию о слежении он получает, выделяют два класса переменных, определяющих ситуацию слежения.
Первый класс переменных связан с типом используемой входной функции, который определяется, прежде всего, характером динамики входной функции во времени. Различают непрерывную и дискретную задачи слежения. При непрерывном слежении параметры входной функции непрерывно изменяются во времени. Если же значения входной функции изменяются в отдельные моменты времени «скачками», то мы имеем дело с задачей дискретного слежения.
Второй класс переменных связан с характером информации о ходе решения задачи слежения. В зависимости от того, движется Цель или она неподвижна, различают соответственно преследующее и компенсаторное сложение. В случае преследующего слежения испытуемый получает информацию трех видов: о движении цели, о собственном движении «преследования» цели и о рассогласовании (или об ошибке) положения цели и курсора. В ситуации компенсаторного слежения цель неподвижна, а испытуемый должен на ней удерживать управляемый объект, который подвер-гается возмущающим воздействиям и отклоняется от требуемого положения. В этом случае информация о собственных регулирующих воздействиях на управляемый объект и характеристики входной функции неразличимы. При решении задачи используется только информация о величине отклонения курсора относительно цели.
В зависимости от прикладной или теоретической направленности изучения слежения по-разному формировались основные задачи исследования и конструировались специфические экспериментальные процедуры, предполагающие, в частности, реализацию определенного вида слежения. Так, при использовании слежения как прикладного метода, как правило, применялось и применяется компенсаторное слежение. Это объясняется прежде всего тем, что основной интерес в этом случае направлен на анализ различных переменных, оказывающих влияние на величину рассогласования между положением задающего и управляемого объектов, и перемещение органа управления с целью минимизации ошибки. Поэтому желательно максимально упростить экспериментальную процедуру и исключить из рассмотрения влияние «избыточных» каналов информации на процесс решения задачи. Напротив, в случае применения слежения для анализа теоретических проблем (например относительно роли эфферентных систем в регуляции движений) богатство информационного поля в ситуации преследующего слежения обеспечивает более широкие возможности.
Использование слежения как средства анализа исполнительной деятельности предполагает выбор и моделирование в экспериментальных условиях (или в условиях обучения операторов при работе на тренажерах) различных переменных, обусловливающих процесс решения двигательной задачи. Среди таких переменных слежения наиболее распространены: временная задержка (т. е. интервал времени между управляющим воздействием и изменением регулируемой величины на входе), одновременное управление несколькими параметрами (многостепенное управление), в том числе и взаимозависимыми, манипулирование зрительной обратной связью (прерывание, инвертирование), дополнительная задача. Введение указанных переменных, а также использование различных видов слежения в сочетании с другими методами анализа движений обеспечивает решение широкого круга прикладных и теоретических задач.
Необходимым условием успешного изучения двигательных актов является создание адекватного способа регистрации и анализа пространственно-временной развертки исполнительных действий. Этому требованию удовлетворяет экспериментальный стенд для исследования инструментальных двигательных навыков.
Функциональная блок-схема экспериментального стенда (рис. 1) включает:
систему управления объектом;
цветной телевизионный индикатор;

управляющую ЭВМ, которая работает как в режиме счета для многомерной статистической обработки результатов, так и в режиме управления экспериментом.
Система управления объектом включает многостепенный орган управления, тензометрический усилитель и блок операционных усилителей.
Орган управления манипуляторного типа (датчик пространственного перемещения руки оператора) представляет собой параметрическую модель руки человека; конструктивно выполнен как шарнирное соединение трех кинематических звеньев посредством одностепенных шарниров и имеет три степени подвижности. Всякое пространственное перемещение точки приложения оператором управляющего усилия трансформируется в соответствующие изменения углов, образованных кинематической схемой органа управления. Входными параметрами являются текущие значения тригонометрических функций углов, формируемые синусно-косинусными датчиками, установленными на осях вращения звена. По ним в аналоговом вычислительном блоке строится пространственная математическая модель органа управления относительно прямоугольной декартовой системы координат. Конструктивное решение органа управления позволяет сохранять содержание и естественную направленность мануальных движений оператора, хотя система управления предусматривает возможность нарушать однородность и . соответствие моторного и сенсорного полей введением коэффициентов сжатия пространства или введением электрической инверсии направления одноименных векторов.
Используемый в экспериментальной установке цветной телевизионный индикатор можно назвать иллюзорно-изобразительным, так как за счет изменения величины управляемого сигнала создается впечатление объемности тестовых и управляемого сигналов. Индикатор выполнен на базе промышленного цветного телевизионного приемника и блока управления. В соответствии с подаваемыми на выходы блока управления аналоговыми электрическими сигналами на экране индикатора формируются световые сигналы различных цветов. Впечатление объемности достигается управлением изменения площади высвечиваемых сигналов. Перемещение световых сигналов в поле экрана осуществляется по горизонтали (X), вертикали (У) и изменению их световой площади(Z). Независимость управления световыми стимулами по параметрам X, У, Z позволяет кодировать ими пространственные координаты перемещения объекта управления и формировать систему отсчета сенсорного поля оператора. Управляющие координатные сигналы строятся в блоке управления объектом по уравнениям связи пространственного движения руки оператора и органа управления.
Управляющая ЭВМ может эксплуатироваться в двух режимах: в активном режиме и режиме счета. Программы управления экспериментом и обработки полученных результатов реализуются по интерпретирующей системе на ЭВМ М-6000 системы АСВТ. Ведение эксперимента осуществляется в режиме диалога с машиной по принципу приоритетного обслуживания следующих устройств связи с объектом: модуля ввода дискретной информации сигналов управления экспериментатора и испытуемого; модуля группового управления выводом дискретной информации тестовых сигналов зрительного канала связи оператора; бесконтактного коммутатора; аналого-цифрового преобразователя, воспринимающего аналоговые сигналы относительно положения руки испытуемого в пространстве.
Использование ЭВМ на линии эксперимента дает возможность предъявлять на экране меняющиеся по сложности, числу элементов и количеству составляющих маршруты движения; вводить сбои в привычное протекание действия, выражающееся в изменении траектории движения; вводить инверсию, т. е. нарушать привычное соотношение перцептивного и моторного полей. Стыковка с ЭВМ облегчила трудоемкую ручную обработку десятков тысяч измерений; позволила получать точностные и скоростные характеристики движения непосредственно в течение эксперимента.
Описанный многоцелевой экспериментальный стенд позволяет регистрировать пространственно-временные — скоростные и точностные— параметры исследуемого процесса. Движения ручки-манипулятора записываются на ленте многоканального полиграфа в виде трех составляющих по оси X, У, Z. На отдельном канале регистрируются сигнал от ЭВМ о предъявлении новой матрицы и сигналы испытуемого о совмещении с каждым элементом данной матрицы.
Движение управляемого пятна записывалось одновременно и из магнитофон, что давало возможность воспроизвести траекторию движения на графопостроителе, а также ввести данные эксперимента в ЭВМ для обсчета.
Применение микроструктурного анализа, смысл которого заключается в выделении быстро текущих компонентов целостного действия, позволило выделить по каждой составляющей X, У, Z пространственного движения следующие стадии: латентную, фази-ческую (реализующую) и стадию контроля и коррекций. На рис. 2 представлен образец записи перехода на один элемент в одном из маршрутов движения. На рис. 2 отчетливо видно, что движению
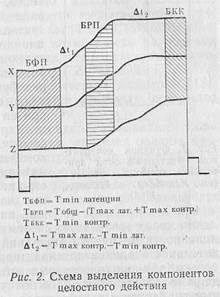
по каждой составляющей предшествует значительный латентный период. После активного движения по каждой составляющей регистрируется длительный период относительного покоя, предшествующий сигналу испытуемого о совмещении управляемого пятна с элементом матрицы. Этот период можно рассматривать как период коррекций, характеризующийся мелкими движениями по той или иной составляющей, и период контроля за качеством совмещения. Как видно из рисунка, время длительности стадий по каждой составляющей неодинаково: программирование по одной составляющей по сравнению с другой идет с некоторым запаздыванием, т. е. возможно последовательное планирование по каждой составляющей. Аналогичным образом с некоторым сдвигом происходят и реализация и контролирование.
Эти данные послужили основанием для выделения так называемого «чистого времени» блоков-стадий: БФП — блока формирования программы, БР — блока реализации, БКК — блока контроля и коррекций, а также двух стадий разброса: Дt1, включающую в себя одновременно и планирование и реализацию, и Дt2, объединяющую реализацию и контролирование. «Чистое время» каждого блока — это то время, когда составляющие движения функционируют в терминах, присущих именно этому блоку, будь то планирование, реализация или контролирование. Разброс, характеризующийся величиной Дt1 и Дt2, дает представление о разбросе не только внутри одной стадии, но также между стадиями движения, характеризуя степень пространственности осуществляемого действия.
Эксплуатация многоцелевого экспериментального стенда открывает широкие возможности для исследования процессов управления и построения движений.
Для решения целого ряда прикладных задач весьма эффективным оказывается использование современных методических средств анализа когнитивных процессов.
Для целого ряда современных операторских профессий решающей является способность зрительного обнаружения и различения критических элементов, предъявляемых на фоне других, отличающихся по одним и совпадающих по другим признакам элементов (экраны радиолокаторов, фотографии событий в камерах Вильсона, рентгеновские снимки и т. д.).Оптимизация такого рода деятельности связана в первую очередь с анализом свойств зрительной системы как фильтра пространственных и временных частот. Психофизические исследования на человеке и психофизиологические исследования на животных [21] показали, что в зрительной системе существуют каналы переработки информации, специфичные по отношению к определенным пространственным частотам изображения. Им свойственна максимальная чувствительность к синусоидально-модулированному распределению яркости, имеющему определенную пространственную частоту. Таким образом, зрительная система структурно и функционально способна к осуществлению ча-

стотного анализа любого изображения, подобно тому как аналитически некоторая функция может быть представлена в виде сумм синусоидальных компонент при ее Фурье-разложении.
Характеристики этих частотно-специфических каналов определяют функцию контрастной чувствительности зрительной системы (рис. 3), которая показывает, насколько различные пространственные частоты изображения усиливаются или, наоборот, ослабляются при прохождении через зрительную систему[2]. Несмотря на то что в силу нелинейности этих преобразований [85] функции контрастной чувствительности адекватно характеризуют возможности нашего зрения только для околопороговых интенсивностей стимуляции, она содержит существенно более полную информацию, чем многочисленные традиционные показатели «остроты зрения». Кроме того, при оценке любых средств зрительного отображения в первую очередь возникает вопрос о том, может ли быть вообще воспринята некоторая информация. Поэтому проблема надпороговой нелинейности зрительной системы в данном контексте не столь существенна.
Рассмотрим более внимательно изображенную на рис. 3 функцию. Хорошо известному факту неразличимости достаточно мелких деталей соответствует падение правой ветви кривой чувствительности в области высоких пространственных частот. Этот недостаток зрения компенсируется с помощью различных способов увеличения угловых размеров изображения. Менее известным является факт сниженной чувствительности зрения к низким пространственным частотам, отражающимся в снижении левой ветви графика. Учет этого факта имеет большое значение, например, при рентгенологии, так как мягкие ткани и опухоли представлены на снимках именно низкочастотными, градуальными признаками яркости. Таким образом, в зависимости от того, в какой части спектра изображения может содержаться критическая информация, целесообразным оказывается не только увеличение, но и уменьшение размеров изображения. Поскольку диапазон возможных изменений угловой величины деталей весьма велик (примерно 1:20), ясно, что этого нельзя достигнуть простым изменением удаленности снимка.
Интересным развитием этого подхода является дополнение анализа пространственной чувствительности информацией о временной разрешающей чувствительности глаза. Эти исследования, в частности, позволили установить, что возможность различения характеристик формы объектов снижается, если пространственно-временные усилия предъявления совпадают с условиями, в которых наблюдается кажущееся (стробоскопическое) движение [18]. налогичное восприятие быстродвижущихся реальных предметов хорошо известно каждому. Близкой областью прикладных исследований, испытавшей сильное влияние экспериментальной психологии, является область проектирования и создания многомерных устройств отображения информации. Здесь задача проектировщика состоит в том, чтобы по возможности одновременно и без интерференции сообщить оператору множество разнородных сведений, которые по отдельности или же в некоторой комбинации определяют правильность принимаемых им решений. Вся история работ в этой области показывает, что идеальным примером решения этой задачи является наше повседневное предметное восприятие, интегрирующее в единый, целостный образ не только разнообразную сенсорную информацию, но также данные, хранящиеся в памяти. Поэтому все более интересные разработки в этой области в большей или меньшей степени опираются на использование экологически естественных механизмов перцептивной обработки, детали которых выявляются с помощью разнообразных методик изучения восприятия. Так, исследования по психофизике восприятия пространства и движения [84] дали начало целому семейству хорошо описанных в специальной литературе устройств отображения типа контактных аналогов— «коналогов». В сочетании с возможностью обращения к точной цифровой информации о каждом из критических параметров ситуации «коналоги» позволяют одновременно учитывать многомерную пространственно-динамическую информацию о положении таких объектов, как самолет, ракета, подводная лодка и т. п.
Большие возможности кроются в использовании резервов зрительной образной памяти для целей идентификации. Как показывают последние исследования, если запоминание случайных зрительных структур страдает от тех же ограничений, что и запоминание бессмысленного вербального материала [90], то запоминание предметных видовых слайдов, пусть даже довольно однообразных
в тематическом отношении, намного превосходит по своему объему и продолжительности хранения все другие известные виды памяти. Может быть, не самым важным, но, безусловно, весьма демонстративным примером опоры на механизмы предметного восприятия может служить работа швейцарских авторов {91], перед которыми
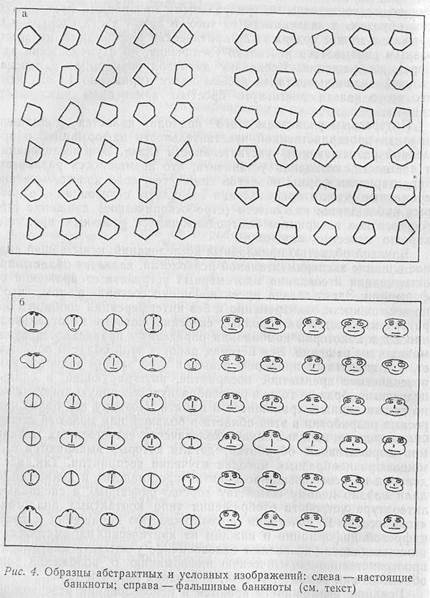
была поставлена задача создания алгоритмов, позволяющих обеспечить зрительное различение настоящих и фальшивых банкнот. Трудность этой задачи состоит в существовании значительного числа пространственных параметров рисунка (расстояния между элементами рисунка, их величина и т. п.), каждый из которых в норме характеризуется определенным диапазоном вариации. Интересно, что попытка представить эти параметры в виде абстрактных фигур — замкнутых полигонов (рис. 4)—оказалась столь же безуспешной, как и использование данных в цифровой форме. Напротив, переход к представлению этих параметров в виде условных изображений человеческих лиц (алгоритм Чернова), как видно из рис. 4, позволяет достаточно легко решить эту проблему.
Для исследования процессов информационного поиска оператором успешно применяются такие методические приемы, как регистрация движений глаз, хронометрический анализ, факторный эксперимент и т. д. [8, 89]. Развитие этих, уже достаточно традиционных, с точки зрения их практического использования, направлений исследований привело к более детальному анализу возможности использования пространственных характеристик движений глаз в оптимизации сложных сенсомоторных координаций. Новым направлением исследования является экспериментальный анализ процессов информационного поиска, которые разворачиваются не во внешнем, а во внутреннем пространстве или, точнее, во внутренних субъективных пространствах памяти оператора.
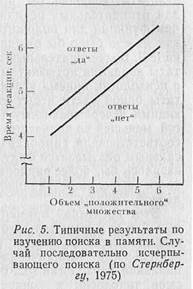
Прототипом большинства подобных исследований является методический прием хронометрического изучения процессов опознания: испытуемый должен как можно быстрее определить, принадлежит ли предъявленный ему объект к предварительно показанному «положительному» множеству [92]. Типичные результаты состоят в том, что время как положительных («да»), так и отрицательных («нет») реакций является линейно-возрастающей функцией величины «положительного» множества (рис. 5). Кроме того, наклон обеих функций оказывается примерно одинаковым. Это говорит о том, что информационный поиск среди репрезентированных в памяти элементов «положительного» множества представляет собой, во-первых, последовательный, а во-вторых, исчерпывающий процесс. Другими словами, это такой процесс, который продолжается до полного перебора в памяти элементов множества, даже если на одном из промежуточных этапов поиска было установлено тождество показанного элемента с одним из хранящихся в памяти. Если бы поиск прекращался сразу после установления тождественности (самоокончивающийся поиск), то в негативных пробах приходилось бы рассматривать примерно в два раза больше элементов, чем в положительных. Поэтому наклон функции отрицательных ответов должен быть в два раза больше наклона функции положительных ответов.
Интересно, что в некоторых исследованиях были получены результаты, казалось бы, противоречащие этому анализу: функции для отрицательных реакций оказались несколько более крутыми, чем функции для положительных реакций, но не в такой степени, как можно было бы ожидать в случае самооканчивающегося поиска [83]. Более тщательный анализ, однако, показал, что эти результаты являются артефактами, к сожалению, еще распространенного в психологии приема усреднения индивидуальных данных. Результаты одной части испытуемых оказались в точности соответствующими исчерпывающему типу поиска, тогда как результаты другой, меньшей по количеству, группы испытуемых достаточно хорошо соответствовали самооканчивающемуся типу. Несколько парадоксальным оказывается факт, что последние испытуемые, выбравшие, казалось бы, более рациональную стратегию работы, в действительности выполняли задание менее эффективно, чем испытуемые первой группы.
Этот последний пример непосредственно подводит нас к чрезвычайно важному для эргономики вопросу об описании и систематизации индивидуальных различий в характеристиках трудовой деятельности. Классические методы советской школы дифференциальной психологии [52, 69] создают основу эргономических приемов типологии и конкретного индивидуально-психологического анализа. Наряду с этим развитие представлений о микроструктуре различных видов познавательной и исполнительной деятельностей позволяет также дать психологически грамотную оценку различиям в особенностях реализующих их функциональных систем у конкретного индивида. При этом появляется возможность преодоления столь глубоко укоренившегося в дифференциальной психологии эмпиризма, сознательно ограничивающегося лишь исследованиями корреляционного типа. Более подробно пример такого подхода рассмотрен в разделе, посвященном методам анализа функциональных состояний [см. также 40].
Дата: 2019-03-05, просмотров: 377.