• пропорциональное;
• инерционное;
• интегрирующее;
• дифференцирующее;
• колебательное.
В пропорциональном звене выходная величина повторяет без искажений запаздывания входную величину (рис. 3.10, a). В качестве примеров пропорциональных звеньев можно привести делитель напряжения, состоящий из двух резисторов (напряжение на каждом резисторе в точности повторяет напряжение, поданное на делитель, но меньше его по значению); рычаг (перемещение одного конца рычага повторяет в масштабе перемещение другого его конца).
В инерционном звене при скачкообразном изменении входной величины выходная величина стремится к новому установившемуся значению по экспоненциальному закону (рис. 3.10, б). Этот закон
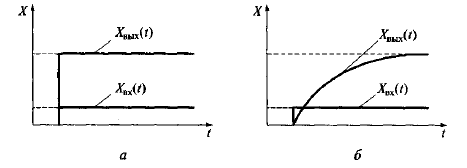
Рис 3.10. Переходные характеристики пропорционального (а) и инерционного (б) звеньев
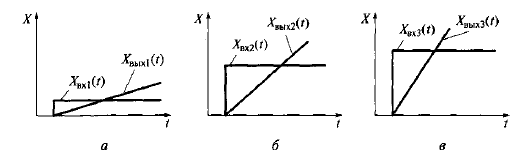
Рис. 3.11. Переходные характеристики (а…в) интегрирующего звена при различных значениях входной величины
выражает инерционность звена, которая приводит к задержке реакции звена на внешнее воздействие.
В реальных звеньях инерционность обусловлена наличием в звене большой массы, момента инерции или электрической емкости. Например, чем больше момент инерции ротора двигателя, тем дольше он будет разгоняться до установившейся частоты вращения при подаче на него напряжения питания в качестве входного воздействия. Чем больше емкость конденсатора, тем дольше он будет заряжаться до величины приложенного напряжения.
В интегрирующем звене выходная величина пропорциональна интегралу от входной величины. Известно, что интеграл постоянной величины представляет собой линейно (т.е. равномерно) увеличивающуюся или уменьшающуюся величину, причем, чем больше входная величина, тем больше скорость изменения выходной величины (рис. 4).
Если входная величина мгновенно изменяется от одного постоянного значения до другого, то выходная величина растет или убывает линейно с углом наклона, зависящим от скачка значения входной величины (например, напряжение на конденсаторе в электрической цепи изменяется пропорционально интегралу от тока заряда конденсатора, рассматриваемого как входное воздействие).
В дифференцирующем звене выходная величина пропорциональна производной (дифференциалу) от входной величины. Производная от любой величины, изменяющейся c течением времени, равна нее изменения (рис. 3.12,a). Чем больше скорость изменения сигнала на входе, тем больше значение выходной величины. Если входная величина изменяется ступенчато (скачком), т.е. c огромной скоростью, то значение сигнала на выходе теоретически становится скоростью, бесконечно большим. В действительности существуют различные причины, которые ограничивают и скорость изменения входного
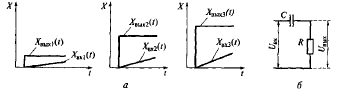
Рис. 3.12. Дифференцирующего звено:
а – переходные характеристики; б – RC- цепочка
сигнала, и максимальное значение выходного сигнала. В качестве примера дифференцирующего звена можно привести RC-цепочку (рис. 3.12,б), состоящую из резистора и конденсатора и широко применяющуюся в электронике для получения коротких импульсов.
В колебательном звене скачкообразное воздействие на входе приводит к колебаниям выходной величины относительно нового установившегося значения. На рис. 3.13,а показана реальная переходная характеристика, отличающаяся наличием начального участка медленного нарастания выходной величины, что связано с неизбежной инерционностью реальных объектов. Если колебания затухают, то звено является устойчивым.
В качестве примера можно привести пружинный амортизатор автомобиля: когда в кузов помещают груз, кузов вместе с грузом проседает и совершает не колебаний, прежде чем примет устойчивое положение. Инерционность звена проявляется в том, что, когда груз касается кузова, в первое мгновение из-за инерции кузов
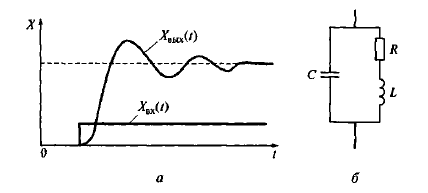
Рис. 3.13. Колебательное звено:
a - реальном переходная характеристика; б - колебательный контур
с грузом движение вниз медленно, затем все больше ускоряется под тяжестью груза и одновременно начинает воспринимать действие амортизатора. В качестве примера можно так же привести колебательный контур, состоящий из конденсатора С и катушки индуктивности L (рис. 3.13, б). При подаче на эту цепь напряжения в ней возникают колебания, которые затухают тем быстрее, чем больше активное сопротивление катушки R.
Такое разнообразие характеристик звеньев позволяет создавать системы автоматического регулирования c различными воздействиями на рабочие органы технологического процесса в зависимости от вида регулируемого параметра и влияния этого параметра на свойства конечного продукта.
При отклонении регулируемого параметра от заданного значения воздействие на рабочий орган организуют по одному из четырех законов регулирования:
• интегральный (И-регулятор);
• пропорциональный (П-регулятор):
• пропорционально-интегральный (ПИ-регулятор);
• пропорционально-интегрально-дифференциальный (ПИД - регулятор).
Интегральный регулятор формирует воздействие на рабочий орган, которое линейно возрастает или убывает до тех пор, пока регулируемый параметр не вернется к заданному значению. Эти регуляторы наиболее просты в реализации, но процесс регулирования носит колебательный характер, и система может оказаться неустойчивой.
Пропорциональный регулятор воздействует на рабочий орган тем сильнее, чем больше отклонение регулируемого параметра от заданного значения, устойчивости таких регуляторов выше, чем интегральных, но им свойственна так называемая статическая погрешность, т.е. после отработки входного воздействия новое установившееся значение параметра всегда не отличается от заданного.
Пропорционально-интегральный регулятор совмещает оба способа регулирования. Рабочий орган воспринимает суммарное воздействие, поэтому в ПИ-регуляторах достигается высокое быстродействие, обеспечивается устойчивость регулирования и отсутствует статическая погрешность. Именно Пи-регуляторы широко применяются при автоматизации технологических процессов.
В пропорционально-интегрально-дифференциальных регулятор к воздействию на рабочий орган, формируемому ПИ-регулятором добавляется составляющая, пропорциональная скорости изменения отклонения регулируемого параметра от заданного значения. Это обеспечивает наибольшую эффективность ПИД-регуляторов, но у них сложная наладка.
Дата: 2019-03-05, просмотров: 556.