1. Гавва О.М., Беспалько A.M., Волчко АЛ. Пакувальне обладнання в 3 кн. — 1 кн. Обладнання для пакування продукції у споживчу тару / За ред. О.М.Гавви, — Київ: ІАЦ «Упаковка», 2008. — 436 с.
2. Современное оборудование для упаковки пищевых продуктов / Ю.В. Бурляй, Л. А. Сухой/ - М.: Пищевая промышленность, 1978 – 237с.
Практична робота №9
Тема: Вивчення конструкції та принципу роботи автомата М1-АРЖ для пакування круп
Мета роботи
Вивчити конструкцію та принцип роботи обладнання для пакування сипких продуктів на прикладі автомата М1-АРЖ
Теоретичні відомості
Автомат призначений для пакування у пакети сипких продуктів (крупи, сіль, цукор тощо).
Автомат (рис. 1) складається з дозатора 6, датувальника 5, пристрою 4 для згортання стрічки пакувального матеріалу в рукав і подачі в нього доз продукту, пристрою 3 для утворення поздовжнього шва на рукаві, механізму 2 для протягування рукава і утворення на ньому поперечних швів, транспортера 1, пульта керування (на рис. не показаний).
Автомат працює таким чином (рис. 2). Стрічка пакувального матеріалу 1 протягується через направляючі валики 2 і 3 і вводиться в рукавоуторювач 23, за допомогою якого згортається в рукав 19. Краї загорнутої в рукав стрічки пакувального матеріалу накладені внапустку під час проходження зони спеціального пристрою 20 підігріваються і зварюються між собою, утворюючи безперервний зварний шов 21. За допомогою кліщеподібних притискачів 17 і 15 рукав почергово перетискається упоперек, підігріваєтья і зварюється, утворюючи при цьому поперечні шви 14.
У відкритий верхній кінець рукава, який знаходиться у рукавоутворювачі 23, встановлена труба 24 з воронкою 25. в процесі роботи автомата об'ємним дозатором відбувається формування доз сипкого продукту, які у встановлені моменти часу із мірних ємкостей 26 дозатора через воронку 25 і трубу 24 вводяться в нижній кінець рукава. Після введення чергової дози сипкого продукту один із пристроїв 17 або 15 перетискає рукав вище рівня дози і, переміщуючись із вниз разом із ним, утворює два поперечних шва.
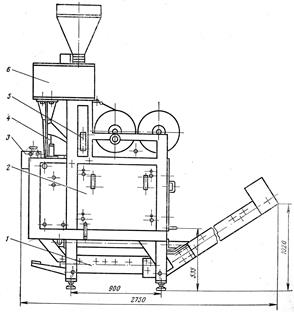
Рис. 1. Автомат М1-АРЖ для пакування круп
Таким чином здійснюється запечатування пакета і формування дна наступного пакета. За час переміщення пристрою 17 або 15 вниз наповнені пакети 13 відділяються від рукава і падають на відвідний транспортер 6, яким виводяться із зони обслуговування автомата.
Над валиком 2 встановлений датувальник 31 із змінними нагрівальними знаками. Він змонтований на важелях 32, що можуть повертатися довкола осі 30. Під час роботи автомата за допомогою пневмокамери важелі повертаються довкола осі за годинниковою стрілкою, припіднімаючи датувальник вгору, який під дією пружини повертається довкола осі 30 проти годинникової стрілки. По команді від розподільчого вала у потрібний момент важелі повертаються проти годинникової стрілки до дотику робочої частини датувальника з планкою 1. Затиснута між валиком 2 і датувальником планка за рахунок тертя приводить датувальник в рух з коловою швидкістю, яка рівна швидкості руху стрічки пакувального матеріалу. За час спільного перемщення датувальник наносить дату на певні місця стрічки.
Згорнута в рукав стрічка безперервно із постійною швидкістю протягується вниз трьома обгумованими валиками 22, які розташовані ззовні рукава 19. Валики отримують безперервний обертовий рух від спеціального вала з двома муфтами вільного ходу, які кінематично зв'язані гнучкми зв'язками із двома носіями 18 і 16 пристроїв 17 і 15 зварювання поперечних швів, які виконані у вигляді кліщеподібних прижимів. Обидва носії являють собою спеціальні важелі, які змонтовані на валу 29 і вільно повертаються відносно нього. Вал приводиться в рух від черв'ячного редуктора 8, який в свою чергу приводиться в рух від електродвигуна через варіатор швидкостей і пасову передачу 5.
На валу 29 жорстко змонтовані кулачки 4 і 7, керують переміщенням штовхачів 11 і 10, періодично повертаючи їх довкола нерухомих осей 27 і 12. Штовхачі через спеціальні пальці 28 і 9 кінематично зв'язані з носіями 18 і 16 і приводять їх в рух, повертаючи за заданою програмою відносно осі вала 29.
Розкриття і закриття кліщеподібних притискачів 17 і 15 здійснюється від двох інших кулачків, які жорстко змонтовані на валу 29 (на рисунку на показані).
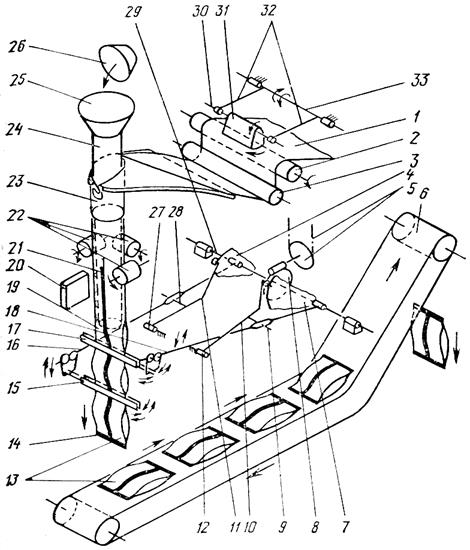
Рис. 2. Технологічна схема автомата М1-АРЖ
Продуктивність автомата регулюється варіатором швидкостей, а довжина пакетів – переміщенням пальців 28 і 9 вздовж штовхачів 11 і 10.
Технічна характеристика автомата:
Продуктивність, пакетів за хвилину............................. до 55
Об'єм доз, см3................................................ 440...720, 900...1500
Розміри пакета, мм.................................................. 140...260х200
Товщина ПЕ стрічки
пакувального матеріалу, мм............................... 0,060...0,080
Ширина рулона, мм........................................................................ 425
Загальна споживана потужність, кВт................................. 2,5
Тиск повітря, МПа.............................................................. 0,05...0,10
Витрата стиснутого повітря, м3/год................................... 0,8
Габарити, мм.......................................... 1400(2750)х800х2700
Маса, кг.................................................................................................. 1085
Звіт по роботі
Звіт по роботі повинен містити:
1. Ескіз функціональної схеми та короткий опис роботи М1-АРЖ.
2. Ескіз загального вигляду і короткий опис конструкції автомата М1-АРЖ.
3. Викладені у письмовій формі основні недоліки та шляхи удосконалення конструкції пакувального автомата.
Дата: 2019-03-05, просмотров: 342.