ВВЕДЕНИЕ
Проектирование сложных технических систем таких, как беспилотный летательный аппарат (БЛА) – это многоэтапный, итерационный процесс, центральное место в котором занимает задача формирования проектных решений проектируемого объекта.
Анализ структур БЛА показывает, что все они отличаются многообразием возможных технических решений по составу и типам подсистем, агрегатов, узлов, вариантами конструкторских и технологических решений, используемых при их разработке, разнообразием принципов и методов управления полетом, характером траекторий и множеством других факторов. Для выбора того или иного варианта проектного решения их количество, необходимое для проектной проработки, увеличивается многократно. Автоматизация процесса оперативного формирования проектных решений альтернативных вариантов БЛА, является одной из важнейших задач САПР.
Формирование проектного решения включает решение задач синтеза и анализа. В технике синтезом принято называть проектную процедуру, результатом которой является соединение различных элементов в единое целое: систему, машину, прибор, процесс и др. [1]. Разработка структуры объекта – проектная процедура структурного синтеза; определение значений параметров элементов – процедура параметрического синтеза.
Реализация процедуры структурного синтеза заключается в формировании множества возможных вариантов с учетом ограничивающих условий. В системах автоматизированного проектирования наибольшее распространение получили комбинаторно-логические методы, основанные на общих принципах комбинаторики. На основе обобщенной структуры БЛА, описывающей все возможные варианты проектно-конструкторских и технологических решений, осуществляется перебор и поиск сочетаний элементов структуры с использованием знаний о данной предметной области, анализа массива существующих решений (аналогов и прототипов) и обобщения опыта проектирования [1,2].
Для БЛА синтез структуры тесно связан с его компоновкой, т.е. с пространственным размещением компонентов проектируемого изделия. Типичными ограничениями при компоновке являются ограничения на расположение и вместимость отсеков, а также несовместимость элементов отдельных типов друг с другом, требующих их размещения в разных отсеках.
Параметрический синтез – во многом творческая работа. Это, прежде всего, обоснованный выбор параметров облика БЛА, базирующийся на опыте и квалификации проектировщика, знании зависимостей этих параметров от характеристик проектируемого БЛА. Практика показывает, что задачи синтеза – наиболее трудно формализуемая часть проектной работы, требующая активного участия проектировщика, и поэтому может быть лишь частично автоматизирована.
Цель задач анализа – получение информации о характере функционирования БЛА и значениях его выходных параметров при сформированной структуре и обоснованно выбранных параметрах самого объекта и его подсистем. Задачи анализа базируются на достаточно хорошо разработанных и формализуемых методах и моделях [1,2], что позволяет автоматизировать процесс их решения, а проектировщику на основе полученной информации быстро и оперативно провести оценку большого числа альтернативных вариантов.
В настоящем пособии рассмотрена методика решения задач проектного анализа БЛА различных классов и типов двигательных установок с использованием учебной автоматизированной системы формирования проектных решений, получившей название САПР-602 [3,4].
ЗАДАЧИ ПРОЕКТНОГО АНАЛИЗА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БЛА)
Для предварительной оценки большого числа альтернативных вариантов БЛА проектировщику необходима информация о баллистических, массовых, геометрических характеристиках, а также об устойчивости и маневренности БЛА по траекториям применения. Таким образом, формирование проектных решений вариантов требует выполнения совокупности информационно-взаимосвязанных задач проектного анализа БЛА [5,6,7], включающих:
· баллистическое проектирование, т.е. расчет траекторных характеристик и потребного запаса топлива при выбранном законе управления полетом и программе работы двигательной установки (ДУ);
· расчет массы частей БЛА и стартовой массы;
· определение геометрических размеров БЛА, центровки, обеспечение устойчивости и маневренности БЛА.
Каждый БЛА предназначен для применения в широком диапазоне дальностей и высот полета. Поэтому решение проектных задач проводят для наиболее трудных условий применения, которые называют расчетными. В этом случае потребные значения запаса топлива и площади крыльев получаются наибольшими.
Особенностью решения рассматриваемой совокупности задач является их информационная взаимосвязанность, требующая итерационного процесса решения. Это отражено в виде многочисленных обратных связей, показанных на рис.1.1, каждая из которых указывает на необходимость возврата к одной из предшествующих задач, либо к коррекции опорного облика БЛА. По-существу, это комплексная задача проектного анализа БЛА.
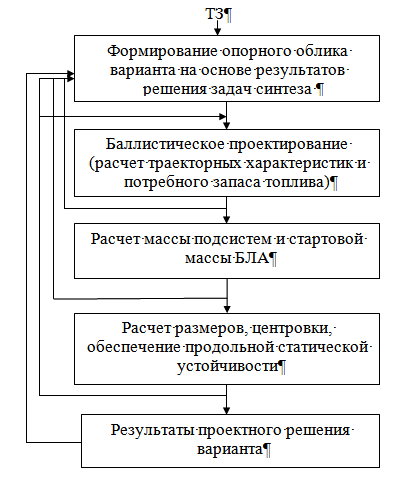
Рис. 1.1 Укрупненная схема решения комплексной задачи проектного анализа вариантов БЛА
Недостаточность и неопределенность исходной информации, приводящая к итерационному характеру проектной задачи и неоднократному вмешательству проектировщика в процесс ее решения, не всегда приводит к желаемому результату.
Нередко уже при выполнении баллистического проектирования не удается получить положительного решения из-за неудачного формирования исходных данных. Обычно это проявляется в чрезмерном падении скорости полета или превышении допустимого угла атаки на каком-либо участке траектории. Для выхода из подобной ситуации приходится возвращаться к начальному этапу формирования опорного облика БЛА и, проанализировав полученную информацию, изменить некоторые параметры: геометрические, траекторные, программу работы ДУ или другие исходные данные.
Ряд трудностей может возникнуть и на этапе расчета стартовой массы: например, масса БЛА может оказаться неприемлемо большой или даже принимать отрицательное значение. Последнее свидетельствует о нарушении уравнения баланса масс [5], вызванного полученными нереально большими значениями относительной массы какого-либо элемента конструкции или ДУ. В этих случаях также необходима обоснованная корректировка исходных данных опорного облика варианта.
При расчете размеров, центровки и положения крыльев, обеспечивающего заданную степень продольной статической устойчивости БЛА, полученные результаты также могут не удовлетворять проектировщика, а иногда вообще не имеют физического смысла (крылья пересекаются с оперением, выходят за пределы габаритов корпуса и др.). Следовательно, требуется вновь, проанализировав причину, корректировать исходную информацию.
Таким образом, даже краткое описание комплексной задачи проектного анализа показывает, что полностью формализовать ее решение невозможно. Решающая роль в этом процессе принадлежит проектировщику, от опыта, знаний и изобретательности которого зависит качество полученного результата. Рассмотрим более подробно содержательную часть задач, входящих в комплексную задачу проектного анализа БЛА.
Баллистическое проектирование
Баллистическое проектирование – это определение траекторных характеристик и потребного запаса топлива путем численного интегрирования уравнений движения совместно с уравнениями, приближенно описывающими систему управления БЛА [6].
Для решения задачи баллистического проектирования и определения потребного запаса топлива необходимы абсолютные размеры БЛА (для расчета Cx и Cy). Вначале они могут быть найдены только приближенно с использованием статистических данных.
Предварительно размеры корпуса рассчитываются исходя из задаваемых статистических значений его параметров λф, λнос, стартовой массы  и средней плотности компоновки БЛА ρср, а также удлинения эквивалентного цилиндра: λw≈λф–0,5λнос. Это позволяет в первом приближении определить объем корпуса
и средней плотности компоновки БЛА ρср, а также удлинения эквивалентного цилиндра: λw≈λф–0,5λнос. Это позволяет в первом приближении определить объем корпуса  ср, (где
ср, (где  ), рассчитать опорные значения его диаметра
), рассчитать опорные значения его диаметра  и длины
и длины  .
.
Для нахождения потребной площади крыла S на основе анализа статистических характеристик БЛА, близких по функциональному назначению, задается значение удельной нагрузки на крыло p= / S. Это дает возможность определить значение площади крыла S= / p, выполнить баллистическое проектирование опорного варианта БЛА и рассчитать для него потребный запас топлива.
В дальнейшем удельная нагрузка на крыло, а, следовательно, и площадь крыла для маневренных БЛА уточняются итерационным путем из условия обеспечения маневренности БЛА, в соответствии с которым его максимальная (располагаемая) перегрузка  =
=  должна быть не меньше потребной перегрузке nпотр, (т.е. перегрузке, необходимой для обеспечения полета по программе или методу наведения), откуда расчетное значение p определяется выражением:
должна быть не меньше потребной перегрузке nпотр, (т.е. перегрузке, необходимой для обеспечения полета по программе или методу наведения), откуда расчетное значение p определяется выражением:
 (1.1)
(1.1)
где ξ – доля выгоревшего топлива,  – скоростной напор.
– скоростной напор.
Вычисление потребной перегрузки nпотр производится в наиболее опасной (расчетной) точке траектории полета БЛА с учетом возможных возмущающих факторов: ошибок наведения, маневра цели и др. Это позволяет определить расчетное значение удельной нагрузки на крыло «с запасом» [6,13].
При решении задачи баллистического проектирования принято допустимым считать движение БЛА считать плоским, а работу системы управления (СУ) идеальной. Это дает возможность существенно упростить уравнения, описывающие работу СУ. В частности, при решении системы уравнений движения могут использоваться уравнения идеальных связей, в результате чего рассчитывается кинематическая траектория движения БЛА. В классической постановке задачи такой подход называют кинематическим [6,7].
В другом подходе [8] модель баллистического проектирования вместо кинематических связей включает упрощенные уравнения законов управления, имитирующие реальную работу системы управления. В этом случае в результате баллистического проектирования будет получена приближенная динамическая траектория БЛА. Такой подход называют динамическим. Оба подхода реализованы в учебной системе САПР-602 и успешно применяются в учебном процессе [2,8,9].
Численное интегрирование уравнений движения осуществляется до момента окончания полета, т.е. до достижения летательным аппаратом цели. Полученная в результате баллистического расчета траектория полета БЛА не является окончательной. Она должна удовлетворять задаваемым в ТЗ тактическим граничным требованиям. Для БЛА класса «поверхность-воздух» (П-В) это может быть, например, средняя скорость V ср, что при заданной дальности D эквивалентно времени полета t к=D / V ср.
Для БЛА классов «воздух-поверхность» (В-П) и «поверхность-поверхность» (П-П) более важным тактическим параметром является конечная скорость V к, обеспечивающая требуемую целевую эффективность БЛА. Для БЛА класса «воздух-воздух» (В-В) необходимо обеспечить в конце полета требуемое превышение скорости БЛА над скоростью цели. Это превышение определяется косвенным путем из условия сопровождения цели головкой самонаведения (ГСН) и требований срабатывания неконтактного взрывателя [6].
Добиться выполнения тактических граничных условий можно только повторным решением задачи баллистического расчета при скорректированной соответствующим образом программе работы ДУ – mсек( t). В случае если программа работы ДУ задана постоянной по времени величиной (  , где τдв – время работы ДУ), то корректируется относительный запас топлива
, где τдв – время работы ДУ), то корректируется относительный запас топлива  . На рис. 1.1 итерационный характер задачи баллистического проектирования отражен наличием обратной связи коррекции относительной массы топлива.
. На рис. 1.1 итерационный характер задачи баллистического проектирования отражен наличием обратной связи коррекции относительной массы топлива.
Массовый расчет
После расчета по теоретико-эмпирическим моделям относительных масс частей БЛА μi [7] при заданной массе полезной нагрузки mпн значение стартовой массы m0 уточняется из уравнения баланса масс:  . При этом совместное решение задач баллистического проектирования и массового расчета повторяется в цикле до получения требуемой точности. В дальнейшем после расчета потребных объемов и размеров БЛА и его частей весь цикл задач проектного анализа повторяется.
. При этом совместное решение задач баллистического проектирования и массового расчета повторяется в цикле до получения требуемой точности. В дальнейшем после расчета потребных объемов и размеров БЛА и его частей весь цикл задач проектного анализа повторяется.
Нужно отметить, что трудоемкость итерационного процесса расчета стартовой массы невелика, так как для вычисления относительных масс частей БЛА µ i используются сравнительно простые модели, а сходимость итерационного процесса определения стартовой массы из уравнения баланса масс достаточно высокая.
С точки зрения организации циклического итерационного процесса массово-баллистического расчета не принципиально, с решения какой задачи начинать, – с баллистического проектирования или расчета массы. Однако если вначале организовать расчет размеров и массы, то число итерационных цепочек уменьшится на одну, что может оказаться полезным для сокращения времени итерационного процесса. Такой подход реализован в модернизированном варианте учебной системе, использующем динамический подход баллистического проектирования [8].
Расчет размеров
Расчет размеров БЛА выполняется после получения массовой сводки (mi = µ i m0) с учетом компоновки, т.е. размещения всех агрегатов и взаимосвязи их между собой. При этом объем каждого отсека БЛА Wi рассчитывается как отношение массы размещаемых в нем агрегатов mi к плотности компоновки этого отсека ρ i, т.е. Wi = mi /ρ i.
Значения плотности компоновки отсеков ρ i определяются из конструктивных особенностей или на основе анализа статистики. Уточненный объем корпуса рассчитывается как сумма объемов его отсеков
 . После окончательного определения объема W, уточняется диаметр корпуса
. После окончательного определения объема W, уточняется диаметр корпуса  , длина корпуса
, длина корпуса  и длины всех его отсеков
и длины всех его отсеков  .
.
Площадь крыла S, как было отмечено ранее, рассчитывается через полученное из условия маневренности значение удельной нагрузки на крыло p, т.е. S=  Размеры несущих поверхностей определяются исходя из найденной площади крыла S и известных (из формирования опорного облика варианта) значениях параметров консолей (λк, ηк,
Размеры несущих поверхностей определяются исходя из найденной площади крыла S и известных (из формирования опорного облика варианта) значениях параметров консолей (λк, ηк,  , tgx1) [7].
, tgx1) [7].
Центровка, обеспечение устойчивости БЛА
В основу расчета центровки кладется массовая сводка БЛА. Для каждого отсека массой mi назначается положение его центра масс xi относительно носка корпуса. Тогда координата центра масс определится выражением:
 =
=  (1.2)
(1.2)
Расчеты центровки выполняются в начале и конце работы двигателя, что позволяет по окончании баллистического проектирования, массового и геометрического расчетов определить относительную разбежку центровки ∆ xm / l ф.
Изменение в полете взаимного положения центра масс xm и фокуса по углу атаки xFα существенно влияет на устойчивость и управляемость БЛА. Поэтому для анализа вариантов необходимо обеспечить заданную минимальную степень продольной статической устойчивости [7]:
∆ xFm =  (1.3)
(1.3)
При известных параметрах оперения положение фокуса по углу атаки зависит от положения крыла по длине корпуса. При заданной минимальной степени продольной статической устойчивости ∆ xFm и найденных в подпрограмме аэродинамического расчета значениях производных коэффициента подъемной силы по углу атаки БЛА и его частей 

 определяется координата начала бортовой хорды x б с использованием методики работы [6].
определяется координата начала бортовой хорды x б с использованием методики работы [6].
Следует отметить, что найденные в результате решения комплексной задачи проектного анализа баллистические, массовые и геометрические характеристики, а также центровка и положение крыльев варианта БЛА могут не удовлетворять требованиям ТЗ. Как результат – коррекция исходного облика и повторное решение всего комплекса задач проектного анализа (обратная связь рис. 1.1).
Отмеченное выше многообразие альтернативных вариантов БЛА требует оперативности их проектного анализа. Естественный путь сокращения сроков проектирования вариантов – структуризация и унификация программно-информационной среды решаемых задач и автоматизация сборки, как самой проектной программы, так и ее информационной модели (входной и выходной информации). По этим принципам построена учебная автоматизированная система САПР-602 [2,3,4], позволяющая оперативно решать задачи проектного анализа БЛА различных классов, конструктивных схем и способов управления.
Выбрать класс БЛА и тип ДУ
Содержание ТФ
БЛА класса В-П с однорежимным РДТТ или ЖРД
БЛА класса В-П с двухрежимным РДТТ
БЛА класса П-П (всех типов)
Дополнительный ТФ для одноступенчатых БЛА класса П-П с двухрежимным РДТТ
Дополнительный ТФ для двухступенчатых БЛА класса П-П
Печать начальных условий
Пошаговый расчет правых частей уравнений движения
Расчет параметров атмосферы
Уточнение шага; проверка: работает ли двигатель
Дополнительный ТФ для БЛА с ЖРД (при ступенчатом регулировании секундного расхода)
Характеристики маршевой ДУ (выбрать один из вариантов)
Однорежимный РДТТ
Двухрежимный однокамерный РДТТ
Двухрежимный двухкамерный РДТТ
ЖРД
Расчет аэродинамических характеристик
Ограничение размаха крыльев
Статистические константы
БЛА класса В-П
Программная высотная траектория (BAL8)
Программная высотная траектория (BAL8) и самонаведение на конечном участке (BAL2)
Программная настильная траектория (BAL10)
БЛА класса П-П
Программная высотная траектория (BAL9)
Программная высотная траектория (BAL9) и самонаведение на конечном участке (BAL2)
Проверка ограничений по V и α
Запоминание параметров траектории в момент «ослепления» ГСН (для траекторий с участком самонаведения (BAL2))
Содержание ТФ
Уточнение шага при развороте траектории (выбрать вариант)
При моделировании траектории программой (BAL8 или BAL9)
При моделировании траектории программой (BAL8 или BAL9) и самонаведением в конце полета (BAL2)
Расчет температуры нагрева конструкции
Печать параметров траектории
Проверка, закончен ли полет
Проверка граничного условия по скорости Vк
Относительные массы приводов, крыльев, корпуса
Расчет относительных масс маршевой ДУ и ускорителя (выбрать нужный вариант)
Однорежимный РДТТ
Двухрежимный однокамерный РДТТ
Двухрежимный двухкамерный РДТТ
ЖРД
Однорежимный РДТТ + ускоритель (двухступенчатый БЛА)
ЖРД + ускоритель (двухступенчатый БЛА)
Расчет стартовой массы БЛА (выбрать нужный вариант)
Одноступенчатые БЛА с РДТТ
Одноступенчатые БЛА с ЖРД
Двухступенчатые БЛА с РДТТ на 2-ой ступени
Двухступенчатые БЛА с ЖРД на 2-ой ступени
Организация итераций по стартовой массе m0
Печать результатов расчета массы БЛА (выбрать вариант)
БЛА с однорежимными РДТТ
БЛА с двухрежимными однокамерными РДТТ
БЛА с двухрежимными двухкамерными РДТТ
БЛА с ЖРД
Расчет размеров БЛА (выбрать вариант)
БЛА с однорежимными РДТТ
БЛА с двухрежимными однокамерными РДТТ
БЛА с двухрежимными двухкамерными РДТТ
Содержание ТФ
БЛА с ЖРД
Расчет центровки и положения крыльев для обеспечения заданной степени продольной статической устойчивости (выбрать вариант)
БЛА с однокамерными РДТТ
БЛА с двухкамерными РДТТ
БЛА с ЖРД
Дополнительный ТФ (только для бескрылых БЛА)
Расчет размеров ускорителя (только для двухступенчатых БЛА)
Печать размеров БЛА (выбрать вариант)
БЛА с РДТТ
БЛА с ЖРД
Размеры ускорителя (для двухступенчатых БЛА)
Вывод графической информации (выбрать вариант)
graf1
graf2
graf$
b707
Примечания:
1) Используемые в таблице 4.8 типовые программные фрагменты предназначены для задач проектного анализа БЛА аэродинамических схем нормальная, «бесхвостка» и «утка». БЛА схемы с поворотными крыльями несколько отличаются моделями расчета аэродинамических характеристик, устойчивости и маневренности. Поэтому для БЛА этой схемы требуется некоторая коррекция задания на генерацию, а именно:
в блоке 7 ТФ b342 необходимо заменить на b343; в блоке 17 после ТФ b362 следует включить ТФ расчета стабилизаторов b706; в блоке 23 ТФ b715 следует заменить на b717; в блоке 26 необходимо добавить ТФ печати b611L.
2) Напомним, что ТФ b708 применяется для расчета давления в камере сгорания однокамерных двухрежимных РДТТ с нерегулируемым соплом (см. формулу 4.1). Если в результате проектных расчетов значение относительной массы РДТТ (αдв) получается недопустимо большим при различных вариациях времени работы ДУ на стартовом и маршевом режимах, то следует удалить ТФ b708, рассмотрев вариант РДТТ с регулировкой сопла, или заменить однокамерный РДТТ на двухкамерный.
Остановимся на некоторых особенностях выбора проектных параметров БЛА классов В-П и П-П с ракетными ДУ.
Параметры траектории полета
Основной участок траектории полета БЛА обоих классов определяется заданной программой. Она описываются рядом параметров, от выбора которых зависят значения потребных перегрузок, аэродинамические характеристики и получаемый в результате потребный запас топлива. Остановимся на особенностях их задания.
Высотные траектории (BAL8, BAL9) (рис. 4.4а, в) характеризуются двумя наиболее опасными с точки зрения определяемых значений потребных перегрузок участками: выход на маршевую высоту полета и программный разворот при наведении на цель.
Участок выхода на маршевую высоту аппроксимирован экспоненциальной зависимостью:
 =
=  – для траектории, описываемой СпП BAL8 (a= tgθmax);
– для траектории, описываемой СпП BAL8 (a= tgθmax);
=  – для траектории, описываемой СпП BAL9 ( a= tgθ0), (4.5)
– для траектории, описываемой СпП BAL9 ( a= tgθ0), (4.5)
где  =
=  ; =
; =  .
.
При выборе параметров θmax и θ0 необходимо стремиться к тому, чтобы перегрузки ny на этих участках были бы не больше перегрузок на конечном участке прямого наведения на цель. Поэтому для траекторий, описываемых СпП BAL8, значение угла θmax задается в диапазоне 10ᵒ…45ᵒ.
Участок разворота при наведении на цель определяется радиусом разворота R1. Чем больше R1, тем меньше перегрузка ny. Однако чрезмерное его увеличение может привести к исчезновению участка прямого наведения. Чтобы исключить такую возможность, задаются ориентировочным значением высоты начала участка пикирования на цель H2, обеспечивающим достаточную длину участка наведения H2/ sinθк. В этом случае опорное значение радиуса разворота определится выражением:
 =
=  (4.6)
(4.6)
Угол подхода к цели θк для конечного участка траектории обычно выбирается в пределах (-30ᵒ…-60ᵒ).
Для БЛА с комбинированной системой управления (BAL8+ BAL2 или BAL9+ BAL2), если процесс самонаведения (т. А на рис. 4.4) начинается раньше, чем разворот на цель, то параметр R1 является избыточным и задается, как правило, в диапазоне R1≈1000…10000м. В этом случае параметр θк также является избыточным и может быть задан условным значением θк = –70ᵒ. Если же процесс самонаведения начинается на участке разворота на цель, то параметры R1 и θк определяются опытным путем.
При моделировании настильной траектории (СпП BAL10) участок выхода на маршевую высоту полета H1 описывается двумя сопряженными дугами окружностей радиусов R1 и R2 (рис. 4.4б). При подготовке исходных данных задается относительный радиус  =R 2 / R 1 и угол наклона траектории в точке сопряжения θmin. Рекомендуемые значения: =(0,5…1), θmin= -10ᵒ…-45ᵒ.
=R 2 / R 1 и угол наклона траектории в точке сопряжения θmin. Рекомендуемые значения: =(0,5…1), θmin= -10ᵒ…-45ᵒ.
В качестве примера формирования исходных данных приведем наиболее важные для отработки модели проектного расчета параметры варианта БЛА класса В-П с комбинированной системой управления, моделируемой СпП BAL8+BAL2 (см. таблицу 4.9), аэродинамическая компоновка которого показана на рис. 4.5. Рассматриваются два расчетных случая применения (с минимальной и максимальной высоты Н0).
Таблица 4.9
Пример формирования основных исходных данных
БЛА класса В-П с комбинированной системой управления
| Идентификатор | Наименование переменной | Значение | |
| Вар. 1 | Вар. 2 | ||
| XK | Координата конца полета | 60.103м | 250. 103м |
| H0 | Высота полета БЛА при t = t0 | 300м | 12. 103м |
| VH | Скорость носителя Vн | 300м/с | 650 м/с |
| VTR | Ускорение БЛА на участке разгона | 150м/с2 | 150м/с2 |
| V0 | Значение скорости БЛА V при t = t0 | 850м/с | 1200м/с |
| TT0 | Значение угла наклона траектории при t = t0 | 0ᵒ | 0ᵒ |
| P | Удельная нагрузка на крыло | 650кг/м2 | 650кг/м2 |
| H1 | Высота маршевого полета | 20000м | 22000м |
| TTM | Максимальный угол наклона траектории | 40ᵒ | 20ᵒ |
| TTК | Конечный угол тангажа | -70ᵒ | -70ᵒ |
| R1 | Радиус разворота на пикирование | 1000м | 40000м |
| XCY | Дальность переключения системы управления | 40000м | 220. 103м |
| VK | Конечное значение скорости полета БЛА | 500м/с | 500м/с |
| M0 | Опорное значение стартовой массы | 700кг | 700кг |
| MUT | Относительная масса топлива (опорная) | 0,5 | 0,5 |
| TAUD | Время работы двигателя (маршевый режим) | 20с | 20с |
| MW | Масса целевого груза (осколочно-фугасная) | 149кг | 149кг |
| MB4(4) | Удлинение целевого груза | 3 | 3 |
| MAP | Масса бортовой аппаратуры | 56кг | 56кг |
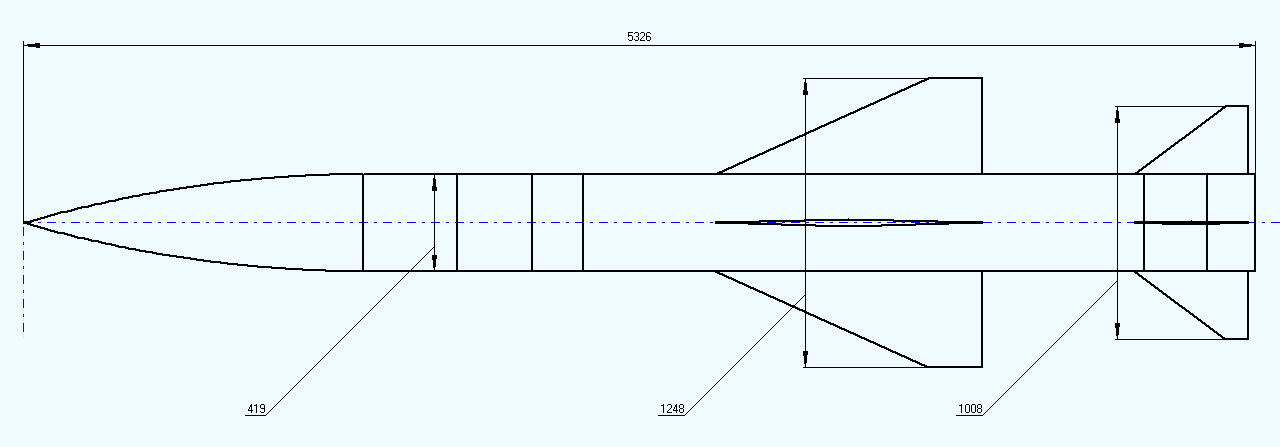
Рис. 4.5. Пример аэродинамической компоновки БЛА класса В-П с комбинированной системой управления
Компоновка БЛА соответствует расположению функционального признака отсеков JK, начиная с носовой части: JK(1)=1; JK(2)=2; JK(3)=6; JK(4)=3; JK(5)=7; JK(6)=5; JK(7)=8; (отсек JK(8)=4 избыточный).
БЛА класса В-В
Отличительная особенность построения модели проектного анализа БЛА класса В-В состоит в необходимости учета того, что воздушная цель, и самолет-носитель характеризуются большим диапазоном высот, скоростей полета и маневренных возможностей. Пуск БЛА может осуществляться при различных ракурсах цели: вдогон, навстречу, на попутно-пересекающихся и встречнопересекающихся курсах. При этом носитель и цель могут находиться на разных высотах, что усложняет задачу поражения цели.
Скоростные характеристики БЛА должны, прежде всего, на всей траектории полета обеспечивать сопровождение цели головкой самонаведения. Помимо этого, при любых ракурсах стрельбы необходимо, чтобы относительная скорость сближения БЛА и цели  обеспечивала условие срабатывания неконтактного взрывателя, т.е. составляла не менее 150…200 м/с. Все эти условия предъявляют повышенные требования к величине потребного относительного запаса топлива µТ [16].
обеспечивала условие срабатывания неконтактного взрывателя, т.е. составляла не менее 150…200 м/с. Все эти условия предъявляют повышенные требования к величине потребного относительного запаса топлива µТ [16].
Для перехвата цели, помимо скоростных характеристик, необходимо обеспечить и маневренные возможности БЛА, Условие маневренности, т. е. превышение располагаемой перегрузки БЛА над потребной перегрузкой (1.1) достигается выбором удельной нагрузкой на крыло p.
Отличие формирования модели проектного анализа БЛА класса В-В от аппаратов других классов состоит в том, что расчетные условия для определения µТ и p существенно отличаются. Так, при определении относительной массы топлива µТ расчетными являются минимальная высота из заданного в ТЗ диапазона и соответствующие этой высоте характеристики цели и носителя.
Для определения удельной нагрузки на крыло p в качестве расчетной необходимо рассматривать максимальную высоту и соответственно характеристики цели и носителя на этой высоте. Поэтому принято допущение, что полет БЛА и цели выполняется в горизонтальной плоскости на двух расчетных высотах – Hmin и Hmax. При этом для нахождения потребных значений µТ и p рассматриваются четыре расчетных случая:
· два расчетных случая перехвата цели на минимальной высоте для нахождения потребной относительной массы топлива µТ (1-ый и 2-ой расчетный случай);
· два расчетных случая перехвата цели на максимальной высоте для определения удельной нагрузки на крыло p (3-ий и 4-ый расчетный случай).
Это предопределяет более сложную логику решения задачи проектного анализа, а, следовательно, и формируемой программы. Укрупненная блок-схема ее решения приведена на рис. 4.5. В программе используются следующие вспомогательные признаки: признак вида расчета JPV и признак условий пуска JPC.
Если JPV=0, то производится расчет относительной массы топлива;
Если JPV≠0, то производится расчет удельной нагрузки на крыло.
Если JPC =0, то решается одна из двух задач:
1) выполняется расчет µТ при полете БЛА на минимальной высоте с максимальной дистанции вдогон по не маневрирующей цели (1-ый расчетный случай);
2) либо выполняется расчет удельной нагрузки на крыло p при пуске БЛА с минимальной дистанции на максимальной высоте навстречу цели с заданной ошибкой пуска (∆ψ) (3-ий расчетный случай). При этом цель осуществляет разворот в горизонтальной плоскости с максимальной боковой перегрузкой nz в сторону, обратную направлению ошибки пуска.
Если JPC≠0, то также решается одна из двух, но других задач:
1) выполняется расчет µТ при стрельбе на минимальной высоте с максимальной дистанции Dгсн, на попутно пересекающихся курсах при заданном начальном курсовом угле цели ηц0 и маневре ее с максимальной перегрузкой на этой высоте nz max (2-ой расчетный случай);
2) либо выполняется расчет удельной нагрузки на крыло p при стрельбе на максимальной высоте с максимальной дистанции Dгсн, на пересекающихся курсах при заданном ракурсе цели ηц0 (4-ой расчетный случай). Цель при этом маневрирует в таком направлении, чтобы значение sin nz увеличивалось к концу полета. Это приводит к росту nпотр, а, следовательно, к уменьшению потребной величины удельной нагрузки на крыло p, т.е. к росту площади крыльев.
Если в ТЗ не предусмотрен пуск БЛА на встречных курсах, то 3-ий расчетный случай исключается. С этой целью в программе введен вспомогательный признак направления атаки JAT. Если БЛА всеракурсный, т.е. используются все четыре расчетных случая, то JAT=0, если же атака в передней полусфере не предусмотрена, то JAT=1. Таким образом, структура проектной программы для БЛА класса В-В имеет более сложный вид, чем для БЛА других классов. Рассмотрим некоторые особенности ее реализации в соответствии с блок-схемой, показанной на рис. 4.6 [11,16].
Блок начальных условий имеет наиболее сложную структуру. Для определения начальных условий численного интегрирования уравнений движения вначале рассматриваются начальные условия 1-го расчетного случая нахождения µТ при стрельбе вдогон (JPC=0):
H= Hmin, r= Dстр, V= Vн1, Vц= Vц1, nц= nц1. (4.8)
При невыполнении условия пуска JPC=0 задаются дополнительные начальные условия, соответствующие 2-му расчетному случаю полета на этой же высоте Hmin на попутно пересекающихся курсах, при маневре цели с максимальной перегрузкой nz.max и начальном курсовом угле ηц0, определяемом из условия:
 , (4.9)
, (4.9)
где χ – угол наклона траектории в горизонтальной плоскости.
Поскольку в момент пуска возможна потеря цели головкой самонаведения (при максимальном угле отклонения следящего устройства), то в программном блоке предусмотрена проверка условия сопровождения цели, при невыполнении которого производится коррекция угла пуска ψ.
Рис. 4.6. Укрупненная блок-схема программы общего проектирования БЛА класса В-В.
Если JPV≠0, то осуществляется переход к расчету начальных условий 3-го и 4-го расчетных случаев. При этом высоте полета присваивается ее максимальное значение H= Hmax. Скорости носителя, цели и перегрузка цели, также соответствуют этой высоте:
Vн= Vн max, Vц= Vц max, nц= nц max. (4.10)
Если JPC =0, то вначале рассматривается 3-ий расчетный случай пуска с минимальной дистанции Dmin с заданной ошибкой пуска ∆ψ. При этом начальные условия имеют вид:
zц =0; xц = – Dmin; r= – Dmin; χ=3,14; ψ= χ– ∆ψ. (4.11)
Если JPC≠0, то при тех же значениях высоты и скорости формируются начальные условия для 4-го расчетного случая, при этом
r= Dгсн; nц= nц max. (4.12)
Блок начальных условий завершается расчетом параметров атмосферы в СпП ATMOS1 и определением пространственный угол атаки  , который необходим для расчета индуктивного сопротивления. ТФ расчета характеристик двигательной установки и аэродинамических характеристик в принципе не отличаются от аналогичных фрагментов программ проектного анализа БЛА других классов.
, который необходим для расчета индуктивного сопротивления. ТФ расчета характеристик двигательной установки и аэродинамических характеристик в принципе не отличаются от аналогичных фрагментов программ проектного анализа БЛА других классов.
Численное интегрирование уравнений движения начинается с 1-го расчетного случая (JPV=0 и JPC =0) при прямолинейном движении БЛА и цели с использованием СпП BAL5. Осуществляемая при этом проверка, сближается ли БЛА с целью (  <0), позволяет исключить ненужный счет в случае, если ˃0.
<0), позволяет исключить ненужный счет в случае, если ˃0.
Окончание пошагового процесса численного интегрирования обеспечивается выполнением условия достижения расстояния до цели в пределах шага численного интегрирования:
 (4.13)
(4.13)
Расчет относительной массы топлива µТ 1-го расчетного случая завершается проверкой выполнения условия по относительной скорости сближения БЛА и цели:
V- Vц =175  , (4.14)
, (4.14)
Здесь  =20…25м/с – погрешность в определении относительной скорости сближения. Если требуемая скорость достигнута, то происходит переход ко 2-му расчетному случаю определения µТ. Если условие (4.14) не выполняется, то производится коррекция µТ по формуле:
=20…25м/с – погрешность в определении относительной скорости сближения. Если требуемая скорость достигнута, то происходит переход ко 2-му расчетному случаю определения µТ. Если условие (4.14) не выполняется, то производится коррекция µТ по формуле:
 (4.15)
(4.15)
и выполняется повторная итерация баллистического расчета. Константа Q, задается в числе исходных данных в диапазоне 3500…4500. Найденное в результате расчета 1-го расчетного случая значение µТ = µТД запоминается.
Интегрирование уравнений движения 2-го расчетного случая выполняется с помощью СпП BAL12. При этом выполняется проверка, следит ли ГСН за целью:
 =
=  , (4.16)
, (4.16)
где - максимальный угол отклонения ГСН;  - текущий угол пеленга цели;
- текущий угол пеленга цели;  - запас угла обзора ГСН, задаваемый в ТЗ.
- запас угла обзора ГСН, задаваемый в ТЗ.
После выполнения проверки (4.16) печатается строка таблицы текущих параметров траектории. Если условие слежения за целью не выполняется, то относительная масса топлива µТ увеличивается на 5  и численное интегрирование рассматриваемого расчетного случая повторяется. Однако вводится ограничение на максимальный запас топлива:
и численное интегрирование рассматриваемого расчетного случая повторяется. Однако вводится ограничение на максимальный запас топлива:  . При невыполнении этого условия счет прекращается с выдачей сопроводительной информации.
. При невыполнении этого условия счет прекращается с выдачей сопроводительной информации.
При удачном завершении обоих расчетных случаев значение µТ выбирается максимальным из решений 1-го и 2-го расчетных случаев.
После нахождения удельной нагрузки на крыло в 3-м и 4-м расчетных случаях осуществляется выбор наименьшего значения p и выполняется расчет массы БЛА. Найденные значения p и m0 сравниваются со значениями предыдущих итераций. Если расхождения значительны (m0 ˃3 и p >5 ), то производится коррекция опорных значений  и
и  и выполняется повторное решение задач баллистического проектирования и расчета массы.
и выполняется повторное решение задач баллистического проектирования и расчета массы.
В дальнейшем, как и при проектировании БЛА других классов, определяются геометрические характеристики, положение центра масс с топливом и без него, а также потребное положения крыльев для обеспечения заданной минимальной степени продольной статической устойчивости.
Следует отметить, что проблема повышения маневренности БЛА класса В-В на стартовом участке столь же актуальна, как и для ЗУР. Это объясняется, прежде всего, необходимостью обеспечить самооборону самолета-носителя от целей, атакующих в задней полуплоскости. Поэтому на участке стартового разворота могут использоваться, как системы управления вектором тяги основного двигателя, так и специальные газодинамические устройства, такие, например, как ИДУ. Системы АУПУ, как правило, не столь эффективны, как для БЛА класса П-В, поскольку стартовая скорость БЛА класса В-В достаточно высока, что обеспечивает эффективную работу аэродинамических рулей.
В представленной в таблице 4.10 структуре задания на генерацию проектной программы, предусмотрена возможность расчета характеристик систем ГДУ, применяемых для повышения маневренности БЛА на старте и рассмотренных ранее в разделе 4.2.
Таблица 4.10
Структура задания на генерацию программы проектного анализа БЛА класса В-В
| Блок | ТФ | Содержание ТФ |
| 1 | grfile | Открытие файла графической информации |
| itergu | Начало итераций по массе ИДУ (для БЛА с ИДУ) | |
| t751, t750 | Вспомогательные операторы, начало итераций по m 0 , p | |
| 2 | Начальные условия численного интегрирования | |
| 2а | t443, t440, t553 | Начальные условия 1-го расчетного случая |
| 2б | t444, t445 | Дополнительные начальные условия 2-го, 4-го и 3-го расчетных случаев |
| 3 | t549 | Коррекция направления пуска БЛА |
| 4 | b321 | Расчет параметров атмосферы |
| 5 | t554, t551 | Организация печати начальных условий |
| Баллистическое проектирование | ||
| 6 | t741 | Расчет пространственного угла атаки |
| 7 | b505, b502 | Проверка, работает ли двигатель |
| 8 | b331, t743 | Расчет характеристик РДТТ |
| 9 | b342 | Расчет аэродинамических характеристик |
| 10 | t555 | Выбор 1-го расчетного случая |
| 11 | t350 | Расчет параметров траектории (BAL12) |
| 12 | b360 | Расчет температуры нагрева конструкции |
| 13 | b301g | Печать параметров траектории |
| 14 | t556 | Выбор 3-го и 4-го расчетных случаев |
| 15 | t562 | Запоминание перегрузки nx перед «ослеплением» ГСН |
| 16 | konstant | Расчет констант |
| 17 | b354 | Расчет параметров траектории (BAL5) |
| 18 | t752, t561 | Проверка, следит ли ГСН за целью |
| 19 | t545 | Проверка, сближается ли БЛА с целью |
| 20 | t540 | Проверка, закончен ли полет |
| 21 | t557, t563 | Переход к 4-му и 2-му расчетным случаям |
| 22 | t547 | Проверка относительной скорости сближения; коррекция относительной массы топлива µТ |
| 23 | t756, t643 | Печать результатов расчета µТ |
| 24 | t560, t754 | Переход к расчету удельной нагрузки на крыло p |
| 25 | t383, t552v | Расчет и коррекция p |
| Расчет стартовой массы, размеров, центровки, устойчивости БЛА | ||
| 26 | b361,b362, b364 | Относительные массы крыльев, приводов и корпуса |
| 2 7 | mgasrul | Расчет параметров газовых рулей (для БЛА с газовыми рулями) |
| 28 | b365 | Расчет относительной массы РДТТ |
| 29 | b376 | Расчет стартовой массы БЛА m0 |
| 30 | t755 | Организация итераций по стартовой массе m0 |
| 31 | b381 | Расчет размеров БЛА |
| 32 | t716, b391 | Расчет центровки и потребного положения крыльев БЛА для обеспечения статической устойчивости |
| 33 | b518v | Коррекция положения рулей бескрылых БЛА (только для бескрылых БЛА) |
| 34 | idskl | Расчет параметров ИДУ (только для БЛА с ИДУ) |
| 35 | iteridu | Организация итераций по массе ИДУ (для БЛА с ИДУ) |
| 36 | b605L, b609L | Печать результатов массового и геометрического расчетов БЛА |
| 37 | Печать результатов расчета параметров ГДУ (выбрать вариант) | |
| вар.1 | rezgasrul | Печать результатов расчета параметров газовых рулей |
| вар.2 | rezskl | Печать результатов расчета параметров ИДУ |
| 38 | Вывод графической информации (выбрать нужный вариант) | |
| вар.1 | graf1 | БЛА с одной несущей поверхностью |
| вар.2 | graf2 | БЛА с двумя несущими поверхностями |
| 39 | b707 | Конец программы |
Более сложный характер решения комплексной задачи проектного анализа БЛА класса В-В предъявляет и некоторые дополнительные требования к формированию комплекта исходных данных. Это, прежде всего, касается скоростных характеристик БЛА. Практика показывает, что наиболее трудно обеспечить выполнения требований по превышению относительной скорости сближения ракеты и цели при стрельбе вдогон на минимальной высоте.
Следует отметить, что дистанция стрельбы (Dстр) на высоте Hmin существенно меньше, чем дальность пуска (Dгсн) на максимальной высоте полета Hmax. Поэтому целесообразно для опорного варианта задавать Dстр в диапазоне (8…12)10-3м. При этом скорость самолета-носителя Vн рекомендуется задавать больше скорости цели Vц.
Что касается маневренных перегрузок цели nц, значения которых важны при определении, как относительного запаса топлива µТ, так и удельной нагрузки на крыло p, то следует напомнить, что на минимальной высоте Hmin перегрузку цели nц рекомендуется задавать в диапазоне 8…12, в то время, как на Hmax, не выше 1,5…3 [6,16].
В качестве примера формирования основных исходных данных приведем наиболее важные для решения комплексной задачи проектного анализа параметры БЛА класса В-В средней дальности (таблица 4.11), аэродинамическая компоновка которого показана на рис. 4.7.
Таблица 4.11
Пример формирования основных исходных данных БЛА класса В-В средней дальности
| Идентификатор | Наименование переменной | Значение |
| DGSN | Дальность захвата цели ГСН (максимальная дальность пуска на Hmax) | 120000м |
| DMIN | Дистанция стрельбы минимальная (на Hmax) | 1000 м |
| DSTR | Дистанция стрельбы на минимальной высоте | 9000 м |
| VH1 | Скорость носителя на минимальной высоте | 500 м/с |
| VC1 | Скорость цели на минимальной высоте | 450 м/с |
| NC1 | Перегрузка цели на минимальной высоте | 12 |
| HMIN | Высота полета минимальная | 100 м |
| HMAX | Высота полета максимальная | 25000 м |
| VHM | Скорость носителя на максимальной высоте | 700 м/с |
| VCM | Скорость цели на максимальной высоте | 650 м/с |
| NCM | Перегрузка цели на максимальной высоте | 1,5 |
| XIG0 | Угол визирования цели начальный | 45 град |
| VTR | Ускорение БЛА на участке разгона | 100 м/с2 |
| TAUD | Время работы двигателя | 15 с |
| DPSI | Начальная ошибка пуска БЛА | 5 град |
| DZG | Предельный угол поворота ГСН | 55 град |
Таблица 4.7 (продолжение)
| Идентификатор | Наименование переменной | Значение |
| DDZ | Запас угла поворота ГСН | 5 град |
| ETAC | Максимальный курсовой угол цели | 45 град |
| JPL | Признак плоскости полета (горизонтальная) | 2 |
| MW | Масса целевого груза | 22 кг |
| MAP | Масса бортовой аппаратуры | 32 кг |
Рис. 4.7. Пример аэродинамической компоновки БЛА класса В-В средней дальности.
Компоновка БЛА соответствует расположению функционального признака отсеков JK, начиная с носовой части: JK(1)=1; JK(2)=2; JK(3)=6; JK(4)=3; JK(5)=7; JK(6)=5; JK(7)=8; (отсек JK(8)=4 избыточный).
ОСОБЕННОСТИ ПРОГРАММ И ИНФОРМАЦИОННЫХ МОДЕЛЕЙ ЗАДАЧ ПРОЕКТНОГО АНАЛИЗА БЛА С ВОЗДУШНО-РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ (ВРД)
Недостатком всех БЛА с ракетными двигателями является их низкая экономичность, приводящая к большим затратам топлива, необходимым для достижения требуемых скоростей и дальностей полета. Поэтому для атмосферных летательных аппаратов всегда стремились использовать кислород воздуха в качестве окислителя. Применение ВРД позволяет повысить экономичность БЛА в несколько раз.
По способу сжатия воздуха ВРД делятся на две большие группы: бескомпрессорные и компрессорные (газотурбинные) [17]. У первых сжатие воздуха перед подачей в камеру сгорания осуществляется только за счет скоростного напора. Из этой группы наибольшее распространение получили прямоточные ВРД (ПВРД). Основной недостаток этих двигателей состоит в том, что для создания требуемой тяги им необходим разгон до скоростей полета, соответствующих М˃2. Это приводит к необходимости применения ускорителей. Частично устранить этот недостаток можно путем размещения в камере сгорания ПВРД твердотопливного заряда или собственно РДТТ. Таким образом, двигатель становится комбинированным (КПВРД). Как правило, требуемую скорость разгона можно обеспечить при пуске БЛА с самолета-носителя.
Из многочисленной группы двигателей второго типа для БЛА наибольшее распространение получили сверхзвуковые турбореактивные двигатели с форсажной камерой (ТРДФ) и дозвуковые двухконтурные турбореактивные двигатели (ТРДД), являющиеся самыми экономичными [17,18]. В данном разделе рассмотрены особенности формирования программ и информационных моделей задач проектного анализа БЛА класса В-П с ВРД обоих типов.
БЛА класса В-П с ТРДД
Двухконтурные турбореактивные двигатели (ТРДД) (Рис.5.1) в настоящее время являются самыми экономичными на дозвуковых скоростях полета (по сравнению с ТРД почти на 25%)[17]. Это преимущество достигается в результате более высоких, чем в ТРД, значений полетного КПД за счет передачи части свободной энергии внутреннего (основного) контура на вентилятор наружного контура, обеспечивающего дополнительный расход воздуха (смешение потоков обоих контуров происходит в сопле) и лучшее использование тепловой энергии. Это позволяет увеличить суммарную тягу, уменьшить удельный расход воздуха, снизить скорость истечения, температуру продуктов сгорания на срезе сопла, уровень шума и выделение вредных примесей. При этом увеличивается ресурс и надежность двигателя.

Рис.5.1. Схема ТРДД. (1 – входное устройство – воздузозаборник;
2 – вентилятор наружного контура; 3, 4 – компрессоры (осевой и центробежный); 5 – камера сгорания; 6, 7 – турбины внутреннего и наружного контура; 8 – сопло).
Для сравнения, например, при одинаковой температуре на входе турбины ≈ 1000ᵒС температура продуктов сгорания на срезе сопла у ТРД ≈780ᵒС, а у ТРДД ≈315ᵒС, т.е. почти вдвое меньше. Это позволяет уменьшить ИК-излучение от двигателя и повысить эффективность преодоления ПВО цели. Однако малообъемные ТРДД значительно сложнее и дороже, чем ТРД аналогичных размеров. Поэтому принято считать, что наиболее целесообразно и экономически выгодно их применять на дозвуковых маловысотных крылатых ракетах (КР) большой дальности [18].
Система наведения таких ракет автономная автокорреляционная инерциальная, комплексируемая с системой коррекции траектории по рельефу местности. Для повышения точности такие системы наведения сочетают коррекцию по рельефу местности с оптико-электронным коррелятором и спутниковой навигацией.
Продолжительный низковысотный полет на постоянной высоте позволяет при моделировании траектории КР класса В-П использовать СпП BAL10 (рис. 5.2). В этом случае участок выхода на маршевую высоту полета H1, описываемый двумя сопряженными дугами окружностей радиусов r1 и r2, определяется заданными значениями относительного радиуса  =r 2 / r 1 и угла наклона траектории в точке сопряжения θmin.
=r 2 / r 1 и угла наклона траектории в точке сопряжения θmin.
Рис. 5.2. Типовая траектория полета КР класса В-П большой дальности
Отличительной особенностью КР большой дальности является скорость полета, близкая к критической (М≤Мкр) на основной части траектории. Вследствие этого почти вся энергия топлива ТРДД расходуется на преодоление лобового сопротивления. Это требует повышения точности расчета аэродинамических характеристик, т.к. ошибки неизбежно ведут к погрешности в определении потребного запаса топлива, стартовой массы и размеров КР. Поэтому для расчета аэродинамических коэффициентов Cy, Cx и mz дозвуковых КР самолетной схемы используется специально разработанная подпрограмма AER2 [18]. Область применения подпрограммы:
· диапазон скоростей полета ограничен условием М≤Мкр0 + 0,05, где Мкр0 – критическое число Маха крыльев при α=0. Это позволяет не учитывать волновое сопротивление.
· зависимости Cy от углов α и δ приняты линейными, т.к. диапазон полетных углов атаки КР не превышает 8…10ᵒ.
При расчете аэродинамических характеристик БЛА с входным устройством коэффициент сопротивления Cx0 может быть представлен в виде суммы:
Cx0= Cx0*+ Cx0вз, (5.1)
где Cx0* – коэффициент сопротивления планера (корпуса, крыла, оперения), рассчитываемый для «гладкого» БЛА в СпП AER2 (ТФ b340);
Cx0вз – коэффициент дополнительного сопротивления воздухозаборника (ВЗ), определяемый в СпП CXVZ (ТФ b340vz) [18].
| В качестве предпочтительных альтернативных вариантов в СпП CXVZ рассмотрены три типа воздухозаборника, показанные на рис.5.3: лобовой (подвесная гондола – JVZ=1); совковый – JVZ=2 и туннельный – JVZ=3. Для каждого варианта ВЗ коэффициент Cx0вз определяется с учетом его формы, размеров и интерференции с корпусом. |
Рис. 5.3. Типы воздухозаборников:
а – лобовой; б – туннельный;
в – совковый
Высотно-скоростные характеристики (ВСХ) ТРДД определяют эффективность преобразования тепловой энергии в механическую. В основу методики расчета зависимости тяги PDV и удельного расхода CUD от высоты и скорости полета при заданном законе регулирования двигателя положены теоретические и практические исследования, изложенные в работах [18,19].
В качестве расчетного режима работы двухконтурного двухвального ТРДД с разделительными контурами принят стендовый режим при Н=0, М=0. ВСХ определяются при законе регулирования, соответствующем постоянной частоте вращения компрессора nк= const.
Программный модуль, разработанный на основе этой методики, оформлен в виде СпП TRDD1. В комплексной программе проектного анализа расчет параметров ТРДД осуществляется двукратным обращением к этой подпрограмме. Вначале при заданной на основе статистической информации величине расчетной (стендовой) тяги PR определяются геометрические размеры двигателя на расчетном режиме. С этой целью используется ТФ B339AМ. В дальнейшем при интегрировании уравнений движения применяется ТФ B339. Расчетное значение тяги PDV уточняется в итерационном цикле расчета баллистических характеристик БЛА.
Область применения СпП TRDD1:
– степень двухконтурности (STEP) – 0,8…2,0
– степень повышения давления в компрессоре (PIKO) – 4…8;
– степень повышения давления в вентиляторе (PIBO) – 1,5…2,5;
– температура газов перед турбиной (TG 0) – 1100…1500К.
Структура задания на генерацию комплексной программы проектного анализа БЛА класса В-П с ТРДД приведена в таблице 5.1.
Таблица 5.1
Структура задания на генерацию комплексной программы проектного анализа БЛА класса В-П с ТРДД
| Блок | ТФ | Содержание ТФ |
| 1 | grfile | Открытие графического файла |
| 2 | b302, b700, b701, b702,b720, e702 | Вспомогательные операторы, начало итераций по m0, P R |
| 3 | b405, b501 | Начальные условия, печать начальных условий |
| Баллистическое проектирование | ||
| 4 | b339am | Первичное обращение к СпП TRDD1 |
| 5 | b321 | Расчет параметров атмосферы |
| 6 | b340 | Расчет аэродинамических характеристик |
| 7 | b342vz | Расчет сопротивления воздухозаборника |
| 8 | b339 | Расчет характеристик ТРДД |
| 9 | e504i | Проверка координаты начала снижения |
| 10 | b359 | Расчет параметров траектории (BAL10) |
| 11 | b503 | Проверка ограничений по V и α |
| 12 | b301g | Печать параметров траектории |
| 13 | b507, b511 | Проверка, окончен ли полет, уменьшение шага |
| 14 | b512a | Проверка выполнения граничных условий, коррекция тяги P R |
Таблица 5.1. (продолжение)
| Блок | ТФ | Содержание ТФ |
| Массовый растет | ||
| 15 | b361, b362t, b364 | Расчет относительных масс приводов, крыльев, корпуса |
| 16 | b369 | Расчет относительной массы ТРДД |
| 17 | e334 | Расчет стартовой массы БЛА с ТРДД |
| 18 | b514a | Организация итераций по стартовой массе и тяге |
| 19 | b639 | Печать результатов баллистического расчета |
| 20 | b516 | Повторный расчет последней траектории; вывод параметров траектории и стартовой массы |
| Расчет размеров, центровки, положения крыльев для обеспечения заданной степени продольной статической устойчивости | ||
| 21 | e335 | Расчет размеров БЛА с ВРД |
| 22 | b393 | Расчет центровки, положения крыльев |
| 23 | b608a | Печать результатов массового расчета |
| 24 | b610L | Печать результатов геометрического расчета |
| 25 | graf2 | Вывод графической информации |
| 26 | b707 | Конец программы |
При формировании комплекта исходных данных комплексной задачи проектного анализа БЛА с ТРДД необходимо задать параметры двигателя:
· опорное значение расчетной тяги двигателя PR=(1000…5000)Н;
· степень двухконтурности STEP=(0,8…2,0);
· степень повышения давления в компрессоре PIK0=(4…8);
· степень повышения давления в вентиляторе PIB0=(1,5…2,5);
· температуру газов перед турбиной TG0=(1100…1500)К.
Помимо этого задается массив характеристик топлива MBAK, первый элемент которого, плотность горючего. Для наиболее приемлемых углеводородных топлив на основе керосина и их модификаций MBAK(1)=(780…1080)кг/м3. Два остальных элемента массива: MBAK(2) – плотность окислителя и MBAK(3) – соотношение масс горючего и окислителя являются избыточными. Условно их можно задать MBAK(2) – тем же значением, что и для горючего, а MBAK(3)=1.Теплотворная способность углеводородного топлива HU=3,107…5,107дж/кг.
При выборе параметров программной траектории BAL10 необходимо задать высоту маршевого полета H1=(от 10 до 100м), относительный радиус дуг окружностей участка выхода на маршевую высоту =r2/ r1 =(от 0,5.до.1), и значение угла наклона траектории в точке сопряжения θmin =(от -10 до -45ᵒ). Полное время полета БЛА tk определяется как отношение дальности полета xk к средней скорости полета Vср.
В качестве примера приведем наиболее важные для отработки модели проектного анализа БЛА класса В-П с ТРДД, задаваемые в числе исходных данных (таблица 5.2), аэродинамическая компоновка которого показана на рис. 5.4.
Таблица 5.2
Пример основных параметров БЛА с ТРДД класса В-П, задаваемых в числе исходных данных
| Идентификатор | Наименование переменной | Значение |
| XK | Координата конца полета | 3000000м |
| Н0 | Высота полета при t= t0 | 1000м |
| Н1 | Высота маршевого полета | 20м |
| ТТМ | Максимальный угол наклона траектории | -10ᵒ |
| VH | Скорость носителя | 230м/с |
| XNM | Координата начала участка изменения высоты | 35000м |
| XKM | Координата конца участка изменения высоты | 90000 |
| ТК | Полное время полета | 12100с |
| PR | Расчетная тяга двигателя | 3000Н |
| STEP | Степень двухконтурности | 1,1 |
| PIK0 | Степень повышения давления в компрессоре | 9 |
| PIB0 | Степень повышения давления в вентиляторе | 1,8 |
| TG0 | Температура газов перед турбиной | 1300К |
| SSBX | Коэффициент восстановления полного давления входного устройства | 0,8 |
Таблица 5.2(продолжение)
| Идентификатор | Наименование переменной | Значение |
| MBAK(1) | Плотность горючего | 860кг/м3 |
| HU | Теплотворная способность топлива | 4,2.107дж/кг |
| JVZ | Признак типа воздухозаборника | 2 |
| JFFS | Признак типа поперечного сечения корпуса | 1 |
| JKORM | Признак формы кормовой части корпуса | 2 |
| JDV | Признак типа двигателя | 3 |
| JPL | Признак плоскости полета | 1 |
| JMET | Признак метода наведения | 4 |
| HS | Степень шероховатости поверхности | 1.10-6м |
| GDV | Относительная (к тяге двигателя) масса ДУ | 0,025 |
| MW | Масса целевого груза | 410кг |
| MAP | Масса бортовой аппаратуры | 45кг |
| JOLA | Признак особенностей БЛА (вариант конструктивного облика) | 1 |
| RODU | Плотность компоновки ДУ | 500кг/м3 |
|  Рис.5.4. Пример аэродинамической компоновки БЛА класса В-П с ТРДД.
Рис.5.4. Пример аэродинамической компоновки БЛА класса В-П с ТРДД.
|
БЛА класса В-П с ТРДФ
Турбореактивный двигатель с форсажной камерой (ТРДФ) (Рис.5.5) является в настоящее время основным типом двигателей для сверхзвуковых летательных аппаратов большой дальности полета. Способ форсирования турбореактивного двигателя реализуется путем дополнительного сжигания топлива за турбиной, для чего между турбиной и реактивным соплом размещается специальная камера с установленными в ней топливными форсунками (форсажная камера).
Рис. 5.5 Схема ТРДФ с осевым компрессором и форсажной камерой: 1 – входная часть; 2 – осевой компрессор; 3 – камера сгорания; 4 – турбина; 5 – форсажная камера; 6 – реактивное сопло.
Дожигание топлива в форсажной камере происходит за счет избыточного кислорода, содержащегося в продуктах сгорания, покидающих турбину, и обусловливает повышение температуры газа перед реактивным соплом. Благодаря этому растет скорость истечения газа из реактивного сопла, что в свою очередь влечет за собой соответствующее увеличение тяги, развиваемой двигателем.
Применение форсажной камеры позволяет повысить тягу турбореактивного двигателя в статических условиях на 30-50%. Однако при этом удельный расход топлива увеличивается примерно на 70-130%. С ростом скорости полета эффективность сжигания топлива в форсажной камере увеличивается. Это позволяет на сверхзвуковых скоростях значительно повысить тягу двигателя при сравнительно небольшом увеличении удельного расхода топлива и расширить диапазон скоростей и высот полета [18,19].
Зависимости тяги, удельного расхода топлива от высоты и скорости полета при заданном законе регулирования определяют показатели экономичности двигателя. Методика расчета высотно-скоростных характеристик ТРДФ изложена в работе [19]. На основе этой методики разработаны алгоритм и специальная подпрограмма расчета высотно-скоростных характеристик ТРДФ (BCX12) [18]. В качестве закона регулирования принят nк= const (постоянная частота вращения компрессора). При этом температура газа перед турбиной ограничена – T*Г= const. Регулирование двигателя обеспечивается изменением подачи топлива в камеру сгорания.
Область применения подпрограммы:
– степень повышения давления в компрессоре  =4…10;
=4…10;
– температура газов перед турбиной  =1000…1800К;
=1000…1800К;
– расчетная тяга ТРДФ P расч=1000…100000Н
Вызов СпП BCX12 осуществляется на каждом шаге численного интегрирования уравнений движения БЛА с помощью ТФ B339ER. Дополнительный типовой фрагмент Е500А предназначен для управления форсажной камерой.
наибольшее распространение получили траектории с высотным и настильным участками полета, показанные на рис
Форма траектории полета БЛА во многом определяется типом целей. При моделировании ее рассматриваются три подхода:
1). Программный полет с участком прямого наведения на цель, описываемый СпП BAL8 (выход на маршевую высоту по экспоненте, полет на постоянной высоте Н1, разворот на пикирование по радиусу Rк и прямое наведение на цель). Схема высотной программной траектории полета показана на рис. 5.6
Рис. 5.6. Высотная программная траектория БЛА класса В-П.
В этом случае задаются углом выхода на маршевую высоту полета Н1 – θmax (в диапазоне 10ᵒ…45ᵒ), высотой начала участка пикирования на цель Н3, углом подхода к цели θк (в пределах -30ᵒ…-60ᵒ) и радиусом разворота на пикирование Rк, определяемым по формуле: Rк=  [11].
[11].
2). Комбинированное наведение на цель с использованием программного выхода на высоту маршевого полета (СпП BAL8) и участок самонаведения на цель по методу пропорциональной навигации, моделируемый СпП BAL2 (рис.5.7а).
В этом случае также необходимо задаться углом выхода на маршевую высоту Н1 – θmax. Параметр R1 задается из условий, определяющих начало процесса самонаведения. Если начало участка самонаведения, определяемое положением т. А на рис.5.7а, происходит раньше, чем разворот на цель, то достаточно задать R1 ≈ 1000м. В противном случае значение R1 определяется расчетным путем. Параметр θк при самонаведении является избыточными. Поэтому он может быть задан условным значением θк =-70ᵒ.
3) Траектория с низковысотным участком подхода к цели, показанная на рисунке 5.7б. Она реализуется программно с использованием СпП BAL8 (угол θmax выхода на маршевую высоту H1 задается); при переходе на низковысотный участок траектории, задаваемый координатой XP и высотой Hк, осуществляется повторное обращение к СпП BAL8 с заданным углом θm in<0.
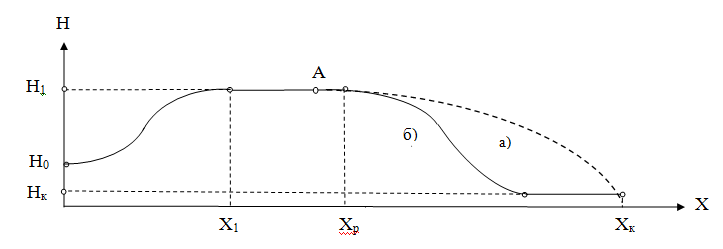
Рис.5.7. Комбинированные траектории БЛА: а) с конечным участком самонаведения на цель; б) с низковысотным участком подхода к цели.
Структура задания на генерацию программы проектного анализа БЛА класса В-П с ТРДФ приведена в таблице 5.3.
Таблица 5.3
Структура задания на генерацию программы проектного анализа БЛА класса В-П с ТРДФ
| Блок | ТФ | Содержание ТФ |
| 1 | grfile | Открытие графического файла |
| 2 | b302, b700, e700, b701, b702 | Вспомогательные операторы, начало итераций по стартовой массе m0, и тяге P R |
| 3 | e702 e703, e700r | Вспомогательные операторы |
| 4 | B405, b501 | Начальные условия, печать начальных условий |
| Баллистическое проектирование | ||
| 5 | b321 | Расчет параметров атмосферы |
| 6 | е500а | Управление форсажом |
| 7 | b339er | Расчет характеристик ТРДФ |
| 8 | b342, b342vz | Расчет аэродинамических характеристик |
| 9 | b521 | Ограничение размаха крыльев |
| 10 | e504k, | Проверка, начался ли маршевый участок полета |
| 11 | ||
Выбрать тип СУ:
1) комбинированная; 2) с одним вариантом управления по траектории
1) Комбинированная СУ с переключением режимов работы
Выбрать вариант управления до переключения СУ
Выбрать вариант управления после переключения СУ
2) СУ с одним вариантом управления по траектории (выбрать вариант)
Пошаговое численное интегрирование уравнений движения БЛА и цели
Проверка: окончен ли полет? (выбрать вариант)
Проверка выполнения граничных условий. Коррекция MUT и p
Выбрать вариант метода наведения
Выбрать вариант граничного условия
Расчет центровки и размеров БЛА
Выбрать вариант БЛА
Выбрать требуемый вариант расчета
Вывод результатов расчета массы и размеров БЛА
Выбрать нужный вариант
Выбрать вариант БЛА
В качестве примера формирования задания на генерацию с использованием таблицы 6.1 рассмотрим, с нашей точки зрения, наиболее интересный вариант БЛА с РДТТ двукратного включения, с программной траекторией, характеризуемой двумя участками изменения высоты полета по сопрягающимся дугам окружностей и низковысотным подходом к цели (рис. 6.1б).
Пример решения задачи проектного анализа БЛА с РДТТ двукратного включения. Повышенные требования к скоростным характеристикам БЛА класса В-П при одновременном увеличении их дальности полета приводят к ограничению возможностей применения РДТТ традиционных конструктивных схем. Добиться увеличения дальности полета и конечной скорости подхода к цели можно усложнением конструкции РДТТ, используя двухкамерный вариант с задержкой включения второй камеры (двукратное включение). Не останавливаясь на особенностях конструктивной реализации двигателя, приведем в качестве примера решение задачи проектного анализа БЛА класса В-П с РДТТ двукратного включения. Структура задания на генерацию программы проектного анализа варианта приведена в таблице 6.2
Таблица 6.2
Структура задания на генерацию программы проектного анализа БЛА класса В-П с РДТТ 2-кратного включения
| № | ТФ | Операции, выполняемые ТФ |
| 1 | grfile | Открытие файла графической информации |
| 2 | w100, w105 | Начало баллистического проектирования |
| 3 | w200, w201, w232b | Предварительный расчет размеров БЛА |
| 4 | w300, w301, w302, w304 | Расчет относительных масс приводов, крыльев, корпуса |
| 5 | w312b, w362b, w381 | Расчет относительной массы и размеров РДТТ 2-кратного включения и массы БЛА |
| 6 | w400, w470 | Начальные условия интегрирования |
| 7 | w500, w502b, w532b | Расчет газодинамических параметров РДТТ двукратного включения |
| 8 | w540 | Расчет текущего значения CYA |
| 9 | w543, w555 | Расчет управляющей перегрузки до переключения СУ |
| 10 | w544, w556 | Расчет управляющей перегрузки после переключения СУ |
| 11 | w546, w547 | Расчет угла атаки, перегрузки и значения CX |
| 12 | w549 | Расчет температуры нагрева конструкции |
| 13 | w600, w620, w621 | Численное интегрирование уравнений движения, вывод параметров траектории |
| 14 | w629, w690, w699 | Проверка окончания полета, завершение пошагового процесса интегрирования |
| 15 | w700, w786 | Проверка граничного условия по скорости, конец баллистического проектирования |
| 16 | w800, w840, w862b | Расчет центровки и потребного положения крыльев БЛА |
| 17 | w900, w971r, w976r | Вывод результатов расчета массы и размеров БЛА |
| 18 | graf2pe | Вывод аэродинамической компоновки БЛА |
| 19 | w990 | Конец программы |
При формировании комплекта исходных данных для рассматриваемого варианта программной траектории полета необходимо задать отношение сопрягающихся радиусов кривизны траектории для второго (R21) и первого (R21K) программных участков, а также дальность и угол наклона траектории в начале и в конце каждого из них. При этом следует помнить, что дальность в конце второго программного участка (X2) и высота полета БЛА на нем (H2) определяются исходя из требований преодоления ПВО цели.
В приведенном примере рассмотрен вариант БЛА, все элементы конструкции которого изготовлены из титановых сплавов; дальность полета XK=300км; конечная скорость VK=500м/с. Остальные, наиболее важные с точки зрения проектного анализа БЛА, исходные данные, приведены в таблице 6.3. Аэродинамическая компоновка спроектированного варианта БЛА приведена на рис. 6.3. Основные результаты баллистического и массово-геометрического проектирования приведены в таблицах 6.4-6.5.
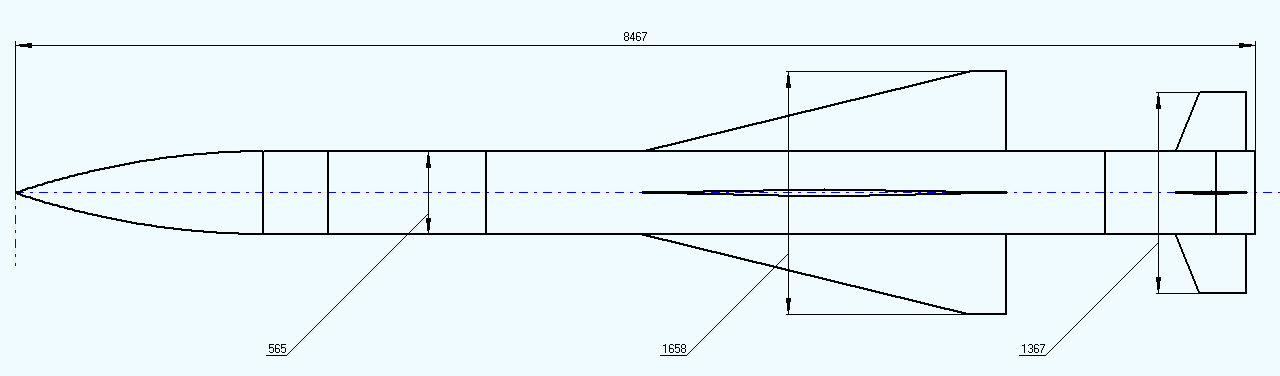
Рис. 6.3. Аэродинамическая компоновка БЛА класса В-П с РДТТ 2-кратного включения
Таблица 6.3
Основные исходные данные БЛА с РДТТ двукратного включения
| Идент. | Наименование переменной | Значение |
| Н00 | Начальная высота полета | 13000м |
| HK | Конечная высота полета | 10м |
| TT0 | Угол наклона траектории при t = t0 | 0ᵒ |
| XK | Координата конца полета | 300000м |
| VH | Скорость носителя | 600м/с |
| VK | Конечное значение скорости БЛА | 500м/с |
| V2B | Скорость БЛА при повторном включении РДТТ | 400м/с |
| MW | Масса целевого груза | 400кг |
Таблица 6.3 (продолжение).
| Идент. | Наименование переменной | Значение |
| MAP | Масса бортовой аппаратуры | 80кг |
| Параметры траектории | ||
| HN | Высота начала 1-го программного изменения высоты | 13000м |
| XN | Дальность в начале 1-го программного изменения высоты | 1000м |
| H1 | Высота в конце 1-го программного изменения высоты | 21000м |
| X1 | Дальность в конце 1-го программного изменения высоты | 30000м |
| R21 | Отношение сопрягающихся радиусов кривизны траектории 1-го программного участка | 1 |
| TK1 | Угол наклона траектории в конце 1-го программного участка | 0ᵒ |
| H2 | Высота полета БЛА в конце 2-го программного участка | 10м |
| R21K | Отношение сопрягающихся радиусов кривизны траектории 2-го программного участка | 1 |
| X2 | Дальность в конце 2-го программного изменения высоты | 270000м |
| TTK | Конечный угол наклона траектории БЛА | 0ᵒ |
| Геометрические параметры | ||
| IK | Число консолей крыльев | 2 |
| P | Удельная нагрузка на крыло | 700кг/м2 |
| LLK | Удлинение двух консолей крыльев | 0,8 |
| ETAK | Сужение консолей крыльев | 10 |
| CC | Относительная толщина профиля крыла | 0,02 |
| TX1 | Тангенс угла стреловидности по задней кромке крыла | 0 |
| LLF | Удлинение корпуса БЛА | 15 |
| LLH | Удлинение носовой части корпуса БЛА | 3 |
Таблица 6.4.
Основные результаты баллистического проектирования БЛА
Текущие параметры траектории
T X H TT V AA NX NY MU PUD CX
0.00 0 13000 0.0 600 4.1 4.9 1.0 1.000 2742 0.0266
4.00 2784 13056 3.6 790 8.8 4.9 3.3 0.926 2743 0.0468
12.00 10451 14626 19.5 1173 9.7 5.3 5.9 0.779 2751 0.0453
19.46 19576 19008 21.6 1556- 12.6 6.1 -7.8 0.642 2765 0.0570
Выключение РДТТ. Выход на высоту H1
19.46 19576 19008 21.6 1556- 16.3 -2.9 -7.8 0.642 0 0.0916
59.46 71684 21000 0.0 1224 3.9 -0.3 1.0 0.642 0 0.0221
99.46 118201 21000 0.0 1103 4.6 -0.3 1.0 0.642 0 0.0249
139.46 160051 21000 0.0 990 5.5 -0.3 1.0 0.642 0 0.0292
179.46 197495 21000 0.0 882 6.7 -0.3 1.0 0.642 0 0.0359
182.31 200000 21000 0.0 874 6.8 -0.3 1.0 0.642 0 0.0365
Начало 2-го программного маневра
186.31 203485 20904 -3.1 869 -1.4 -0.2 -0.2 0.642 0 0.0206
194.31 210376 20147 -9.4 865 -1.3 -0.2 -0.2 0.642 0 0.0206
210.31 223727 16408 -21.9 873 -1.0 -0.3 -0.3 0.642 0 0.0202
218.31 230074 13441 -28.2 878 -0.8 -0.4 -0.4 0.642 0 0.0200
226.31 23607 9812 -32.2 870 2.6 -0.9 2.1 0.642 0 0.0225
234.31 242015 6496 -26.1 827 1.9 -1.2 2.0 0.642 0 0.0224
242.31 247861 3986 -20.4 760 1.6 -1.3 1.9 0.642 0 0.0232
258.31 258358 1084 -10.5 601 1.6 -1.2 1.6 0.642 0 0.0260
266.31 262808 417 -6.5 525 1.7 -1.0 1.4 0.642 0 0.0278
274.31 266716 94 -3.0 453 2.1 -1.0 1.3 0.642 0 0.0353
Выход на высоту H2. Повторное включение РДТТ
282.31 270130 10 0.0 460 1.3 3.8 1.0 0.623 2430 0.0305
286.31 272277 10 0.0 613 0.7 3.8 1.0 0.575 2430 0.0213
290.31 275027 10 0.0 760 0.5 3.7 1.0 0.528 2430 0.0193
294.31 278352 10 0.0 899 0.3 3.4 1.0 0.481 2430 0.0178
298.31 282212 10 0.0 1028 0.2 3.1 1.0 0.434 2430 0.0168
300.17 284176 10 0.0 1083 0.2 3.0 1.0 0.412 2430 0.0163
Выключение РДТТ
300.17 284176 10 0.0 1083 0.2 -4.9 1.0 0.412 0 0.0192
308.17 291538 10 0.0 781 0.4 -3.0 1.0 0.412 0 0.0225
316.17 296978 10 0.0 591 0.6 -1.9 1.0 0.412 0 0.0255
320.17 299202 10 0.0 522 0.8 -1.6 1.0 0.412 0 0.0269
321.74 300000 10 0.0 498 0.8 -1.5 1.0 0.412 0 0.0275
Относительная масса топлива (общая) MUT = 0.5883; в том числе:
на стартовом режиме MUT1 = 0.3584; на маршевом режиме MUT2 = 0.2299.
Таблица 6.5.
Основные результаты массово-геометрического расчета БЛА с РДТТ 2-кратного включения
| Идент. | Наименование переменной | Значение | |
| Результаты массового расчета | |||
| M0 | Стартовая масса БЛА, кг | 2255,0 | |
Таблица 6.5 (продолжение).
| Идент. | Наименование переменной | Значение |
| MG(1) | Масса крыльев, кг | 50,217 |
| MG(1) | Масса оперения, кг | 22,550 |
| MG(1) | Масса рулевых приводов, кг | 58,960 |
| MG(1) | Масса твердого топлива, кг | 1326,69 |
| MG(1) | Масса РДТТ (без топлива), кг | 262,136 |
| MG(1) | Масса конструкции корпуса, кг | 54,416 |
| Результаты геометрического расчета | ||
| D | Диаметр корпуса, м | 0,564 |
| ML(1) | Длина корпуса, м | 8,467 |
| ML(2) | Длина носовой части корпуса, м | 1,693 |
| S | Площадь крыльев с подфюзеляжной частью, м2 | 3,221 |
| L | Размах крыльев, м | 1,657 |
| TX0 | Тангенс угла стреловидности по передней кромке | 4,09 |
| MB(1) | Корневая хорда крыла, м | 3,639 |
| MB(2) | Концевая хорда крыла, м | 0,248 |
| MB(3) | Бортовая хорда крыла, м | 2,484 |
| MB(4) | САХ крыла с подфюзеляжной частью | 2,436 |
| XB | Координата начала бортовой хорды, м | 4,279 |
| XOB | Координата оси вращения рулей, м | 8,163 |
| MLO(7) | Длина 2-х камер РДТТ с днищами, м | 4.226 |
| DOB1 | Толщина обечайки стартовой камеры, м | 0,0024 |
| DTZ1 | Толщина ТЗП обечайки стартовой камеры, м | 0,0062 |
| LMKD | Длина маршевой камеры РДТТ с днищами, м | 1,767 |
| DOB | Толщина обечайки маршевой камеры, м| | 0,0012 |
| DTZ | Толщина ТЗП обечайки маршевой камеры, м | 0,0051 |
| DKP | Диаметр критического сечения маршевого сопла, м | 0,132 |
| DA | Диаметр среза маршевого сопла, м | 0,350 |
ПРИЛОЖЕНИЕ
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Петраш В.Я. Методы и модели автоматизированного проектирования летательных аппаратов. М.: Изд-во МАИ, 2007.
2. Петраш В.Я. Автоматизация проектирования. Формирование проектных решений беспилотных ЛА. М.: Изд-во МАИ, 2016.
3. Чернобровкин Л.С., Павленко В.К., Овчинников С.П. Программное обеспечение автоматизированного проектирования ЛА. М: Изд-во МАИ, 1987
4. Чернобровкин Л.С., Петраш В.Я. Прикладные программы учебной системы автоматизированного проектирования летательных аппаратов. М: Изд-во МАИ, 1980 М: Изд-во МАИ, 1988
5. Чернобровкин Л.С. Общие вопросы проектирования и выбор схемы ЛА. М: Изд-во МАИ, 1987
6. Чернобровкин Л.С. Аэродинамическая компоновка ЛА. Баллистическое проектирование. М: Изд-во МАИ, 1988
7. Чернобровкин Л.С. Расчет стартовой массы и размеров ЛА. М: Изд-во МАИ, 1989
8. Пестов М.Д. Методика баллистического проектирования и расчета массы ЛА с использования учебной САПР. – М: Изд-во МАИ, 1985
9. Петраш В.Я., Коваленко А.И., Савин В.М. Разработка прикладных программ блочно-модульной структуры. – М: Изд-во МАИ, 2003
10. Коваленко А.И., Петраш В.Я. Формирование проектных решений беспилотных летательных аппаратов в программно-информационной среде базы знаний. М: Изд-во МАИ, 2014
11. Чернобровкин Л.С. Методические указания к курсовому проекту по дисциплине «Проектирование ЛА». М: Изд-во МАИ, 1995
12. Проектирование зенитных управляемых ракет. Под редакцией Голубева И.С., Светлова В.Г.– М: Изд-во МАИ, 2001.
13. Мизрохи В.Я. Проектирование управления зенитных ракет. – М: Изд-во МАИ, 2010
14. Петраш В.Я. Особенности автоматизированного проектирования беспилотных ЛА с аэрогазодинамическим управлением. – М: Изд-во МАИ, 2009
15. Петраш В.Я., Коваленко А.И. Расчет параметров и характеристик ЛА с устройствами газодинамического управления. – М: Изд-во МАИ, 2003
16. Денегин Н.В. Автоматизированное проектирование ЛА класса «воздух-воздух». – М: Изд-во МАИ, 1987
17. Гусейнов А.Б. Особенности проектирования крылатых ЛА с ВРД. – М: Изд-во МАИ, 1987
18. Гусейнов А.Б. , Трусов В.Н. Проектирование крылатых ракет с ТРД. – М: Изд-во МАИ, 2003
19. Теория и расчет воздушно-реактивных двигателей / Под ред. С.М. Шляхтенко. – М: Машиностроение, 1987
20. Денегин Н.В., Мельников В.В., Петраш В.Я. Проектирование летательных аппаратов с прямоточными воздушно-реактивными двигателями. – М: Изд-во МАИ, 1983
21. Пестов М.Д. Проектирование РДТТ. – М: Изд-во МАИ, 1992
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ
1. ЗАДАЧИ ПРОЕКТНОГО АНАЛИЗА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БЛА)
2. УЧЕБНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА САПР-602
2.1. Элементная база программно-информационного обеспечения системы
2.2. Автоматизация сборки проектных программ и их информационных моделей
3. ФОРМИРОВАНИЕ ОПОРНОГО ОБЛИКА ВАРИАНТА БЛА
3.1. Формализация облика, внутренней структуры и компоновки БЛА
3.2 Формирование информационных массивов характеристик агрегатов и элементов конструкции БЛА
4. ПОСТРОЕНИЕ ПРОГРАММ И ИНФОРМАЦИОННЫХ МОДЕЛЕЙ ЗАДАЧ ПРОЕКТНОГО АНАЛИЗА БЛА С РАКЕТНЫМИ ДВИГАТЕЛЯМИ
4.1 Особенности формирования исходных данных БЛА с ракетными двигателями
4.2 БЛА класса П-В с аэродинамическим управлением
4.3 БЛА класса П-В с аэрогазодинамическим управлением
4.3.1. БЛА с моментным аэрогазодинамическим управлением
4.3.2. БЛА с поперечным аэрогазодинамическим управлением
4.4 БЛА классов В-П и П-П с ракетными двигателями
4.5 БЛА класса В-В
5. ОСОБЕННОСТИ ПРОГРАММ И ИНФОРМАЦИОННЫХ МОДЕЛЕЙ ЗАДАЧ ПРОЕКТНОГО АНАЛИЗА БЛА С ВОЗДУШНО-РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ (ВРД)
5.1 БЛА класса В-П с ТРДД
5.2 БЛА класса В-П с ТРДФ
5.3 БЛА класса В-П с КПВРД
6. ОСОБЕННОСТИ РЕШЕНИЯ ЗАДАЧ ПРОЕКТНОГО АНАЛИЗА БЛА В МОДЕРНИЗИРОВАННОЙ УЧЕБНОЙ САПР
ПРИЛОЖЕНИЕ
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ
Проектирование сложных технических систем таких, как беспилотный летательный аппарат (БЛА) – это многоэтапный, итерационный процесс, центральное место в котором занимает задача формирования проектных решений проектируемого объекта.
Анализ структур БЛА показывает, что все они отличаются многообразием возможных технических решений по составу и типам подсистем, агрегатов, узлов, вариантами конструкторских и технологических решений, используемых при их разработке, разнообразием принципов и методов управления полетом, характером траекторий и множеством других факторов. Для выбора того или иного варианта проектного решения их количество, необходимое для проектной проработки, увеличивается многократно. Автоматизация процесса оперативного формирования проектных решений альтернативных вариантов БЛА, является одной из важнейших задач САПР.
Формирование проектного решения включает решение задач синтеза и анализа. В технике синтезом принято называть проектную процедуру, результатом которой является соединение различных элементов в единое целое: систему, машину, прибор, процесс и др. [1]. Разработка структуры объекта – проектная процедура структурного синтеза; определение значений параметров элементов – процедура параметрического синтеза.
Реализация процедуры структурного синтеза заключается в формировании множества возможных вариантов с учетом ограничивающих условий. В системах автоматизированного проектирования наибольшее распространение получили комбинаторно-логические методы, основанные на общих принципах комбинаторики. На основе обобщенной структуры БЛА, описывающей все возможные варианты проектно-конструкторских и технологических решений, осуществляется перебор и поиск сочетаний элементов структуры с использованием знаний о данной предметной области, анализа массива существующих решений (аналогов и прототипов) и обобщения опыта проектирования [1,2].
Для БЛА синтез структуры тесно связан с его компоновкой, т.е. с пространственным размещением компонентов проектируемого изделия. Типичными ограничениями при компоновке являются ограничения на расположение и вместимость отсеков, а также несовместимость элементов отдельных типов друг с другом, требующих их размещения в разных отсеках.
Параметрический синтез – во многом творческая работа. Это, прежде всего, обоснованный выбор параметров облика БЛА, базирующийся на опыте и квалификации проектировщика, знании зависимостей этих параметров от характеристик проектируемого БЛА. Практика показывает, что задачи синтеза – наиболее трудно формализуемая часть проектной работы, требующая активного участия проектировщика, и поэтому может быть лишь частично автоматизирована.
Цель задач анализа – получение информации о характере функционирования БЛА и значениях его выходных параметров при сформированной структуре и обоснованно выбранных параметрах самого объекта и его подсистем. Задачи анализа базируются на достаточно хорошо разработанных и формализуемых методах и моделях [1,2], что позволяет автоматизировать процесс их решения, а проектировщику на основе полученной информации быстро и оперативно провести оценку большого числа альтернативных вариантов.
В настоящем пособии рассмотрена методика решения задач проектного анализа БЛА различных классов и типов двигательных установок с использованием учебной автоматизированной системы формирования проектных решений, получившей название САПР-602 [3,4].
ЗАДАЧИ ПРОЕКТНОГО АНАЛИЗА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БЛА)
Для предварительной оценки большого числа альтернативных вариантов БЛА проектировщику необходима информация о баллистических, массовых, геометрических характеристиках, а также об устойчивости и маневренности БЛА по траекториям применения. Таким образом, формирование проектных решений вариантов требует выполнения совокупности информационно-взаимосвязанных задач проектного анализа БЛА [5,6,7], включающих:
· баллистическое проектирование, т.е. расчет траекторных характеристик и потребного запаса топлива при выбранном законе управления полетом и программе работы двигательной установки (ДУ);
· расчет массы частей БЛА и стартовой массы;
· определение геометрических размеров БЛА, центровки, обеспечение устойчивости и маневренности БЛА.
Каждый БЛА предназначен для применения в широком диапазоне дальностей и высот полета. Поэтому решение проектных задач проводят для наиболее трудных условий применения, которые называют расчетными. В этом случае потребные значения запаса топлива и площади крыльев получаются наибольшими.
Особенностью решения рассматриваемой совокупности задач является их информационная взаимосвязанность, требующая итерационного процесса решения. Это отражено в виде многочисленных обратных связей, показанных на рис.1.1, каждая из которых указывает на необходимость возврата к одной из предшествующих задач, либо к коррекции опорного облика БЛА. По-существу, это комплексная задача проектного анализа БЛА.
Рис. 1.1 Укрупненная схема решения комплексной задачи проектного анализа вариантов БЛА
Недостаточность и неопределенность исходной информации, приводящая к итерационному характеру проектной задачи и неоднократному вмешательству проектировщика в процесс ее решения, не всегда приводит к желаемому результату.
Нередко уже при выполнении баллистического проектирования не удается получить положительного решения из-за неудачного формирования исходных данных. Обычно это проявляется в чрезмерном падении скорости полета или превышении допустимого угла атаки на каком-либо участке траектории. Для выхода из подобной ситуации приходится возвращаться к начальному этапу формирования опорного облика БЛА и, проанализировав полученную информацию, изменить некоторые параметры: геометрические, траекторные, программу работы ДУ или другие исходные данные.
Ряд трудностей может возникнуть и на этапе расчета стартовой массы: например, масса БЛА может оказаться неприемлемо большой или даже принимать отрицательное значение. Последнее свидетельствует о нарушении уравнения баланса масс [5], вызванного полученными нереально большими значениями относительной массы какого-либо элемента конструкции или ДУ. В этих случаях также необходима обоснованная корректировка исходных данных опорного облика варианта.
При расчете размеров, центровки и положения крыльев, обеспечивающего заданную степень продольной статической устойчивости БЛА, полученные результаты также могут не удовлетворять проектировщика, а иногда вообще не имеют физического смысла (крылья пересекаются с оперением, выходят за пределы габаритов корпуса и др.). Следовательно, требуется вновь, проанализировав причину, корректировать исходную информацию.
Таким образом, даже краткое описание комплексной задачи проектного анализа показывает, что полностью формализовать ее решение невозможно. Решающая роль в этом процессе принадлежит проектировщику, от опыта, знаний и изобретательности которого зависит качество полученного результата. Рассмотрим более подробно содержательную часть задач, входящих в комплексную задачу проектного анализа БЛА.
Баллистическое проектирование
Баллистическое проектирование – это определение траекторных характеристик и потребного запаса топлива путем численного интегрирования уравнений движения совместно с уравнениями, приближенно описывающими систему управления БЛА [6].
Для решения задачи баллистического проектирования и определения потребного запаса топлива необходимы абсолютные размеры БЛА (для расчета Cx и Cy). Вначале они могут быть найдены только приближенно с использованием статистических данных.
Предварительно размеры корпуса рассчитываются исходя из задаваемых статистических значений его параметров λф, λнос, стартовой массы и средней плотности компоновки БЛА ρср, а также удлинения эквивалентного цилиндра: λw≈λф–0,5λнос. Это позволяет в первом приближении определить объем корпуса ср, (где ), рассчитать опорные значения его диаметра и длины .
Для нахождения потребной площади крыла S на основе анализа статистических характеристик БЛА, близких по функциональному назначению, задается значение удельной нагрузки на крыло p= / S. Это дает возможность определить значение площади крыла S= / p, выполнить баллистическое проектирование опорного варианта БЛА и рассчитать для него потребный запас топлива.
В дальнейшем удельная нагрузка на крыло, а, следовательно, и площадь крыла для маневренных БЛА уточняются итерационным путем из условия обеспечения маневренности БЛА, в соответствии с которым его максимальная (располагаемая) перегрузка = должна быть не меньше потребной перегрузке nпотр, (т.е. перегрузке, необходимой для обеспечения полета по программе или методу наведения), откуда расчетное значение p определяется выражением:
(1.1)
где ξ – доля выгоревшего топлива, – скоростной напор.
Вычисление потребной перегрузки nпотр производится в наиболее опасной (расчетной) точке траектории полета БЛА с учетом возможных возмущающих факторов: ошибок наведения, маневра цели и др. Это позволяет определить расчетное значение удельной нагрузки на крыло «с запасом» [6,13].
При решении задачи баллистического проектирования принято допустимым считать движение БЛА считать плоским, а работу системы управления (СУ) идеальной. Это дает возможность существенно упростить уравнения, описывающие работу СУ. В частности, при решении системы уравнений движения могут использоваться уравнения идеальных связей, в результате чего рассчитывается кинематическая траектория движения БЛА. В классической постановке задачи такой подход называют кинематическим [6,7].
В другом подходе [8] модель баллистического проектирования вместо кинематических связей включает упрощенные уравнения законов управления, имитирующие реальную работу системы управления. В этом случае в результате баллистического проектирования будет получена приближенная динамическая траектория БЛА. Такой подход называют динамическим. Оба подхода реализованы в учебной системе САПР-602 и успешно применяются в учебном процессе [2,8,9].
Численное интегрирование уравнений движения осуществляется до момента окончания полета, т.е. до достижения летательным аппаратом цели. Полученная в результате баллистического расчета траектория полета БЛА не является окончательной. Она должна удовлетворять задаваемым в ТЗ тактическим граничным требованиям. Для БЛА класса «поверхность-воздух» (П-В) это может быть, например, средняя скорость V ср, что при заданной дальности D эквивалентно времени полета t к=D / V ср.
Для БЛА классов «воздух-поверхность» (В-П) и «поверхность-поверхность» (П-П) более важным тактическим параметром является конечная скорость V к, обеспечивающая требуемую целевую эффективность БЛА. Для БЛА класса «воздух-воздух» (В-В) необходимо обеспечить в конце полета требуемое превышение скорости БЛА над скоростью цели. Это превышение определяется косвенным путем из условия сопровождения цели головкой самонаведения (ГСН) и требований срабатывания неконтактного взрывателя [6].
Добиться выполнения тактических граничных условий можно только повторным решением задачи баллистического расчета при скорректированной соответствующим образом программе работы ДУ – mсек( t). В случае если программа работы ДУ задана постоянной по времени величиной ( , где τдв – время работы ДУ), то корректируется относительный запас топлива . На рис. 1.1 итерационный характер задачи баллистического проектирования отражен наличием обратной связи коррекции относительной массы топлива.
Массовый расчет
После расчета по теоретико-эмпирическим моделям относительных масс частей БЛА μi [7] при заданной массе полезной нагрузки mпн значение стартовой массы m0 уточняется из уравнения баланса масс: . При этом совместное решение задач баллистического проектирования и массового расчета повторяется в цикле до получения требуемой точности. В дальнейшем после расчета потребных объемов и размеров БЛА и его частей весь цикл задач проектного анализа повторяется.
Нужно отметить, что трудоемкость итерационного процесса расчета стартовой массы невелика, так как для вычисления относительных масс частей БЛА µ i используются сравнительно простые модели, а сходимость итерационного процесса определения стартовой массы из уравнения баланса масс достаточно высокая.
С точки зрения организации циклического итерационного процесса массово-баллистического расчета не принципиально, с решения какой задачи начинать, – с баллистического проектирования или расчета массы. Однако если вначале организовать расчет размеров и массы, то число итерационных цепочек уменьшится на одну, что может оказаться полезным для сокращения времени итерационного процесса. Такой подход реализован в модернизированном варианте учебной системе, использующем динамический подход баллистического проектирования [8].
Расчет размеров
Расчет размеров БЛА выполняется после получения массовой сводки (mi = µ i m0) с учетом компоновки, т.е. размещения всех агрегатов и взаимосвязи их между собой. При этом объем каждого отсека БЛА Wi рассчитывается как отношение массы размещаемых в нем агрегатов mi к плотности компоновки этого отсека ρ i, т.е. Wi = mi /ρ i.
Значения плотности компоновки отсеков ρ i определяются из конструктивных особенностей или на основе анализа статистики. Уточненный объем корпуса рассчитывается как сумма объемов его отсеков
. После окончательного определения объема W, уточняется диаметр корпуса , длина корпуса и длины всех его отсеков .
Площадь крыла S, как было отмечено ранее, рассчитывается через полученное из условия маневренности значение удельной нагрузки на крыло p, т.е. S= Размеры несущих поверхностей определяются исходя из найденной площади крыла S и известных (из формирования опорного облика варианта) значениях параметров консолей (λк, ηк, , tgx1) [7].
Центровка, обеспечение устойчивости БЛА
В основу расчета центровки кладется массовая сводка БЛА. Для каждого отсека массой mi назначается положение его центра масс xi относительно носка корпуса. Тогда координата центра масс определится выражением:
= (1.2)
Расчеты центровки выполняются в начале и конце работы двигателя, что позволяет по окончании баллистического проектирования, массового и геометрического расчетов определить относительную разбежку центровки ∆ xm / l ф.
Изменение в полете взаимного положения центра масс xm и фокуса по углу атаки xFα существенно влияет на устойчивость и управляемость БЛА. Поэтому для анализа вариантов необходимо обеспечить заданную минимальную степень продольной статической устойчивости [7]:
∆ xFm = (1.3)
При известных параметрах оперения положение фокуса по углу атаки зависит от положения крыла по длине корпуса. При заданной минимальной степени продольной статической устойчивости ∆ xFm и найденных в подпрограмме аэродинамического расчета значениях производных коэффициента подъемной силы по углу атаки БЛА и его частей определяется координата начала бортовой хорды x б с использованием методики работы [6].
Следует отметить, что найденные в результате решения комплексной задачи проектного анализа баллистические, массовые и геометрические характеристики, а также центровка и положение крыльев варианта БЛА могут не удовлетворять требованиям ТЗ. Как результат – коррекция исходного облика и повторное решение всего комплекса задач проектного анализа (обратная связь рис. 1.1).
Отмеченное выше многообразие альтернативных вариантов БЛА требует оперативности их проектного анализа. Естественный путь сокращения сроков проектирования вариантов – структуризация и унификация программно-информационной среды решаемых задач и автоматизация сборки, как самой проектной программы, так и ее информационной модели (входной и выходной информации). По этим принципам построена учебная автоматизированная система САПР-602 [2,3,4], позволяющая оперативно решать задачи проектного анализа БЛА различных классов, конструктивных схем и способов управления.
УЧЕБНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА САПР-602
Дата: 2019-03-05, просмотров: 984.