Схемы структурные определяют основные функциональные части изделия, их назначение и взаимосвязи и служат для общего ознакомления с изделием. На структурной схеме раскрывается не принцип работы отдельных функциональных частей изделия, а только взаимодействие между ними. Поэтому составные части изделия изображают упрощенно в виде прямоугольников произвольной формы.
Допускается применять условные графические обозначения.
При разработке проекта автоматизации в первую очередь необходимо решить, с каких мест те или иные участки объекта будут управляться, где будут размещаться пункты управления, операторские помещения, какова должна быть взаимосвязь между ними, т. е. необходимо решить вопросы выбора структуры управления. Под структурой управления понимается совокупность частей автоматической системы, на которые она может быть разделена по определенному признаку, а также пути передачи воздействий между ними. Графическое изображение структуры управления называется структурной схемой. Хотя исходные данные для выбора структуры управления и ее иерархии с той или иной степенью детализации оговариваются заказчиком при выдаче задания на проектирование, полная структура управления должна разрабатываться проектной организацией.
Выбор структуры управления объектом автоматизации оказывает существенное влияние на эффективность его работы, снижение относительной стоимости системы управления, ее надежности, ремонтоспособности и т.д.
В самом общем виде структурная схема системы автоматизации представлена на рис. 8.1. Система автоматизации состоит из объекта автоматизации и системы управления этим объектом. Благодаря определенному взаимодействию между объектом автоматизации и системой управления система автоматизации в целом обеспечивает требуемый результат функционирования объекта, характеризующийся параметрами х1, х2, ..., хn.
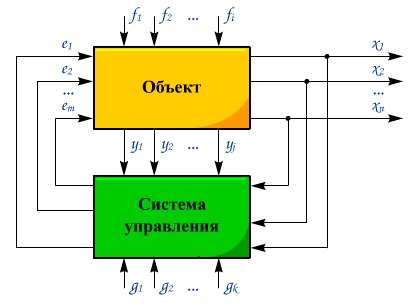
Рис. 8.1. Структурная схема системы автоматизации
Кроме этих основных параметров, работа комплексного объекта автоматизации характеризуется рядом вспомогательных параметров y1, y2,... yi, которые также должны контролироваться и регулироваться (например, поддерживаться постоянными). К такого рода параметрам можно отнести, например, величины, характеризующие работу установок подготовки технологического пара, насосных станций оборотного водоснабжения и т. д.
От этих установок требуется только подача на вход технологической установки сырья и энергоносителей с заданными параметрами. При этом необходимая дозировка подачи сырья и энергоносителей осуществляется средствами управления, относящимися к технологической установке.
В процессе работы на объект поступают возмущающие воздействия f1, f2,... fi, вызывающие отклонения параметров x1, х2, ..., хn от их требуемых значений. Информация о текущих значениях x1, х2,..., хn, у1, у2, ..., yi поступает в систему управления и сравнивается с предписанными им значениями g1, g2,..., gk, в результате чего система управления вырабатывает управляющие воздействия E1, E2,…, Em для компенсации отклонений выходных параметров.
Таким образом, объект автоматизации в общем случае состоит из нескольких в большей или меньшей степени связанных друг с другом участков управления. Участки управления физически могут представляться в виде
отдельных установок, агрегатов и т. д. или в виде локальных каналов управления отдельными параметрами одних и тех же установок, агрегатов и т. д.
В свою очередь, система управления в зависимости от важности регулируемых параметров, круга работников эксплуатационного персонала, которым необходимо знать их значения для осуществления оптимального управления объектом, в общем случае должна обеспечивать разные уровни управления объектом автоматизации, т. е. должна состоять из нескольких пунктов управления, в той или иной степени взаимосвязанных друг с другом.
С учетом изложенного структуры управления объектом автоматизации могут быть в частных случаях одноуровневыми централизованными, одноуровневыми децентрализованными и многоуровневыми. Одноуровневые системы управления, в которых управление объектом осуществляется с одного пункта управления, называются централизованными. Одноуровневые системы, в которых отдельные части сложного объекта управляются из самостоятельных пунктов управления, называются децентрализованными.
Структурные схемы одноуровневых централизованных и децентрализованных систем приведены на рис.8.2, на котором стрелками показаны только основные потоки передачи информации от объекта управления к системе управления и управляющие воздействия системы на объект управления. На рис.8.2 отдельные части сложного объекта управления, управляемые соответственно с пунктов ПУ1 - ПУ3, разделены штриховыми линиями.
Одноуровневые централизованные системы применяются в основном для управления относительно несложными объектами или объектами, расположенными на небольшой территории. Большинство промышленных объектов в настоящее время представляет собой сложные комплексы, отдельные части которых расположены на значительном расстоянии друг от друга.
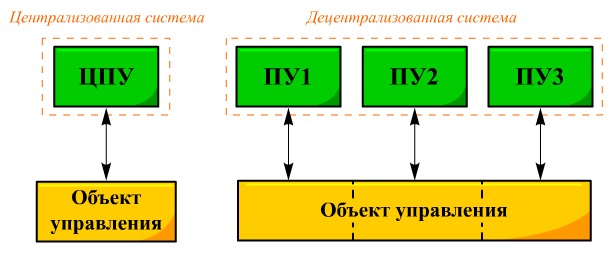
Рис. 8.2. Примеры одноуровневых систем управления
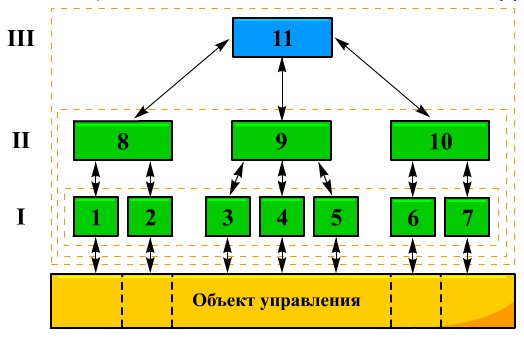
Рис. 8.3. Пример трехуровневой системы управления:
I - III - уровни управления
Кроме основных технологических установок, объекты имеют большое число вспомогательных установок-подобъектов (промышленные котельные, компрессорные, насосные станции оборотного водоснабжения, котлы-утилизаторы, очистные сооружения и т.п.), которые необходимы для обеспечения технологических установок всеми видами энергии, а также для утилизации и нейтрализации остаточных продуктов технологического процесса.
Если управление такого комплексного объекта построить по одноуровневой централизованной системе, то намного усложнятся коммуникации системы управления, резко возрастут затраты на ее сооружения и эксплуатацию, центральный пункт управления получится громоздким. Переработка информации, большая часть которой является ненужной для непосредственного ведения технологического процесса, представляет большие затруднения. Удаленность пункта управления от того или иного вспомогательного подобъекта затрудняет принятие оперативных мер по устранению тех или иных неполадок. В этом случае более приемлемой становится одноуровневая децентрализованная система управления.
Однако с помощью одноуровневых систем не всегда представляется возможным оптимально решить вопросы управления технологическими процессами. Это в первую очередь относится к сложным технологическим процессам. Тогда целесообразно переходить к многоуровневым системам управления. В качестве примера на рис.8.3 представлена трехуровневая система управления сложным объектом с разветвленными технологическими связями между установками. Отдельные технологические установки управляются децентрализованно с пунктов управления 1 - 7. Это первый уровень управления. С пунктов 1 - 7 соответственно управляются объекты, имеющие существенную технологическую взаимосвязь. В связи с этим наиболее ответственные регулируемые параметры установок передаются на пункты управления 8 - 10 второго уровня управления. Основные параметры, определяющие технологический процесс объекта в целом, могут управляться и контролироваться с пункта управления 11 третьего уровня.
Для первого уровня при проектировании целесообразно предусматривать три режима управления:
командами, поступающими от уровня более высокого ранга;
командами, формирующимися непосредственно на первом уровне;
командами, поступающими как с уровня более высокого ранга, так и формирующимися непосредственно на первом уровне.
Для уровня второго ранга и выше возможны четыре режима работы:
аппаратура данного i-го ранга принимает и реализует в управляющие воздействия команды (i + 1)-го ранга;
команды формируются непосредственно на аппаратуре i-го ранга;
все функции управления с i-го ранга передаются на аппаратуру (i - 1)-го ранга;
часть команд на аппаратуру i-го ранга поступает с (i + 1)-го ранга, часть команд формируется на i-м ранге, часть функций управления передана на аппаратуру (i- 1)-го ранга.
Аппаратура i-го ранга соответственно должна иметь переключатели режимов на три положения с четкой сигнализацией положений.
Перевод аппаратуры с режима 1 на режим 2 осуществляется по команде или с разрешения оператора системы вышестоящего ранга.
Передача функций управления тем или иным параметром на нижестоящий ранг осуществляется только после приема команды о передаче и подтверждения оператора системы нижестоящего ранга о готовности к принятию на себя тех или иных функций управления (формирования команд).
Многоуровневая структура системы управления обеспечивает ее надежность, оперативность, ремонтопригодность. При этом легко решается оптимальный уровень централизации управления с минимальным количеством средств технологического контроля, управления и линий связи между ними.
АСУ ТП классифицируются на уровни классов 1, 2 и 3. К классу 1 (АСУ ТП нижнего уровня) относятся АСУ ТП, управляющие агрегатами, установками, участками производства, не имеющие в своем составе других АСУ ТП. К классу 2 (АСУ ТП верхнего уровня) относятся АСУ ТП, управляющие группами установок, цехами, производствами, в которых отдельные агрегаты (установки) имеют свои локальные системы управления, не оснащенные АСУ ТП класса 1. К классу 3 (АСУ ТП многоуровневые) относятся АСУ ТП, объединяющие в своем составе АСУ ТП классов 1, 2 и реализующие согласованное управление отдельными технологическими установками или их совокупностью (цехом, производством).
Построение систем автоматизации по уровням управления определяется как требованиями снижения трудозатрат на их реализацию, так и целями (критериями) управления технологическими объектами.
Система автоматизации структурно может быть представлена по-разному.
В общем случае любая система может быть представлена конструктивной, функциональной или алгоритмической структурой. В конструктивной структуре системы каждая ее часть представляет собой самостоятельное конструктивное целое. Примерами изображения конструктивных структурных схем системы автоматизации могут служить рис.8.1 - 8.3.
В функциональной структуре каждая часть предназначена для выполнения определенной функции, в алгоритмической - для выполнения определенного алгоритма преобразования входной величины, являющегося частью алгоритма функционирования системы в целом.
В проектах автоматизации изображают конструктивные структурные схемы с элементами функциональных признаков.
Полные сведения о функциональной структуре с указанием локальных контуров регулирования, каналов управления и технологического контроля приводятся в функциональных схемах.
Алгоритмические структурные схемы по контурам регулирования крайне необходимы при производстве наладочных работ систем автоматизации.
Дата: 2019-03-05, просмотров: 507.