Цифровой (дискретного счета) метод измерения частоты реализован в цифровых (электронно-счетных — ЭСЧ) частотомерах. Данные приборы удобны в эксплуатации, имеют широкий диапазон измеряемых частот (от нескольких герц до сотен мегагерц) и позволяют получить результат измерения с высокой точностью (относительная погрешность измерения частоты 10-6...10-9). Как уже отмечалось, цифровые частотомеры являются многофункциональными приборами. В зависимости от режима их работы можно проводить измерение не только частоты и отношения двух частот, но и интервалов времени (периода следования периодических сигналов и интервала, заданного временным положением двух импульсов).
Принцип измерения частоты гармонического сигнала цифровым методом поясняет рис.7, где приведены структурная схема цифрового частотомера в режиме измерения частоты и временные диаграммы к его работе.
Исследуемый гармонический сигнал, имеющий частоту fx, подается на входное устройство (ВУ), усиливающее или ослабляющее его до значения, требуемого для работы последующего устройства частотомера (рис. 7, а).
Снимаемый с выхода ВУ гармонический сигнал u1 (рис. 7.7, б) поступает на первый формирователь импульсов (Ф1), преобразующий его в последовательность коротких однополярных импульсов и2, следующих с периодом Тх = 1/fx и называемых счетными. Причем передние фронты этих импульсов практически совпадают с моментами перехода сигнала и1 через нулевое значение на оси времени при его возрастании. Формирователь Ф1 состоит из усилителя-ограничителя и компаратора (триггера Шмитта).
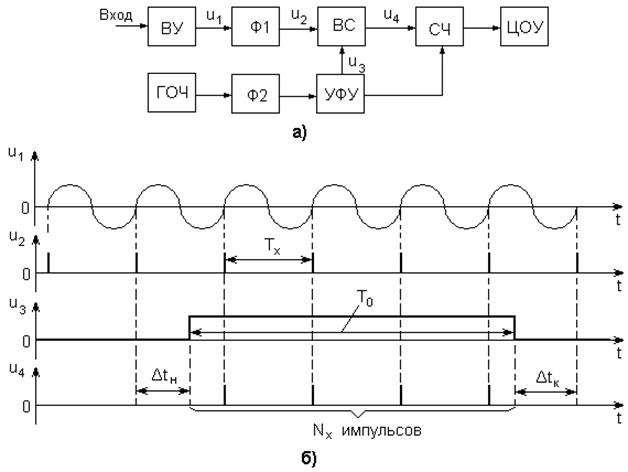
Рисунок 7 - Цифровой частотомер в режиме измерения частоты:
а) структурная схема, б) временные диаграммы
Счетные импульсы u2 поступают на один из входов временного селектора (ВС), на второй вход которого от устройства формирования и управления (УФУ) подается строб-импульс uз прямоугольной формы и калиброванной длительности Т0 > Тх. Интервал времени Т0 называется временем счета. Временной селектор открывается строб-импульсом u3 , и в течение его длительности пропускает группу (пакет) импульсов u2 на вход счетчика (СЧ). В результате на счетчик поступает пакет из Nx импульсов u4. Из рис. 7, б следует, что
T0 = NxTx - Δtн + Δtκ = NxTx - Δtд (3)
где ΔtΗ и Δtκ — погрешности дискретизации начала и конца интервала Т0, вызванные случайным положением строб-импульса относительно счетных импульсов u2; Δtд = Δtн- Δtκ - общая погрешность дискретизации.
Пренебрегая в (3) погрешностью Δtд, получаем, что число импульсов в пакете Nx = T0/Tx = T<fx и, следовательно, измеряемая частота пропорциональна числу счетных импульсов, поступающих на счетчик:
fx=N/T0. (4)
Для формирования строб-импульса на устройство УФУ поступают короткие импульсы с периодом Т0 (на рисунке для упрощения не показаны) от схемы, включающей генератор образцовой частоты (ГОЧ) и второй формирователь импульсов (Ф2), аналогичный формирователю импульсов Ф1. В составе ГОЧ имеются кварцевый генератор образцовой частоты fкв и декадный делитель частоты с коэффициентом деления Кд (каждая декада уменьшает частоту fкв в десять раз). Период импульсов на выходе формирователя Ф2 и длительность строб-импульса равны периоду сигнала на выходе делителя частоты, т.е. Т0 = Кд/fкв; поэтому выражение (4) можно представить в виде
fx = Nx fкв/Kд . (5)
Отношение fкв/Kд можно дискретно изменять вариацией Кд, т.е. за счет изменения числа декад делителя Д.
Счетчик подсчитывает Nx импульсов и выдает соответствующий код в цифровое отсчетное устройство ЦОУ. Отношение fкв/Kд выбирается равным 10n Гц, где n — целое число. При этом ЦОУ отображает число Νχ, соответствующее измеряемой частоте fx в выбранных единицах. Например, если за счет изменения Кд выбрано n = 6, то число Nx, отображаемое на ЦОУ, соответствует частоте fx, выраженной в МГц. Перед началом измерений УФУ сбрасывает показания счетчика в нуль.
Погрешность измерения частоту fx имеет систематическую и случайную составляющие.
Систематическая составляющая вызывается в основном долговременной нестабильностью частоты кварцевого генератора fкв. Ее уменьшают путем термостатирования кварца или за счет применения в кварцевом генераторе элементов с термокомпенсацией. При этом относительное изменение частоты fкв за сутки обычно не выше δκв = 5·10-9. Погрешность за счет неточности установки номинального значения частоты fкв уменьшается калибровкой кварцевого генератора по сигналам эталонных значений частоты, передаваемых по радио, или с помощью перевозимых квантовых стандартов частоты. Относительная погрешность калибровки кварцевого генератора не превосходит (1...5)10-10. Очень часто требуемая стабильность частоты достигается введением в схему кварцевого генератора системы фазовой автоподстройки (ФАПЧ).
Случайная составляющая определяется погрешностью дискретизации Δtд = Δtн - Δtκ. Поскольку взаимная синхронизация строб-импульса и счетных импульсов отсутствует, погрешности Δtн и Δtκ, определяющие на рис. 7.7, б положение начала и конца строб-импульса между соседними двумя счетными импульсами, могут принимать во времени с одинаковой вероятностью значения от нуля до Т0. Поэтому погрешности Δtн и Δtκ являются случайными и распределены по равномерному закону. Вследствие независимости этих погрешностей общая погрешность дискретизации ΔtД распределена по треугольному закону с предельными значениями ±Т0.
Максимальную погрешность Δtд = ±Т0 удобно учитывать через эквивалентное случайное изменение числа счетных импульсов Ν, на ±1 импульс. При этом максимальная абсолютная погрешность дискретизации может быть определена разностью значений частоты fx , получаемых по формулам (4) или (5) при Νχ± 1 и Νχ, и равна Δfx = ±1/T0. Соответствующая максимальная относительная погрешность: δ = Δfx/fx. = ±1/Nx= ±1/(T0fx).
С учетом изложенного суммарная относительная погрешность измерения частоты цифрового частотомера нормируется в процентах величиной
 (6)
(6)
Отсюда следует, что суммарная погрешность измерения из-за погрешности дискретизации увеличивается по мере уменьшения измеряемой частоты fx. При достаточно малой частоте fx она может превзойти допустимое значение даже при максимальном времени счета Т0, которое в цифровых частотомерах обычно не превышает 1 с или 10 с. В этом случае целесообразно измерить период Тк =1/fx, а затем вычислить искомую частоту fx.
Для уменьшения влияния погрешности дискретизации на результат измерения частоты fx можно провести ее многократные наблюдения, а затем выполнить их статистическую обработку в порядке, указанном в разделе 2.4.
Обычно диапазон измеряемых частот цифровых частотомеров ограничивается снизу погрешностью дискретизации, а сверху — конечным быстродействием используемых счетчиков-делителей. Верхний предел измерения частоты обычно не превосходит 200 МГц, и его расширяют способом гетеродинного преобразования (переноса) измеряемой частоты в область более низких частот. Один из способов такого преобразования рассмотрен в предыдущем разделе.
Необходимо отметить, что в структурную и принципиальную схемы частотомера обязательно включается схема автоматической регулировки усиления (АРУ) и подавления внешних помех. При малом уровне входного сигнала (ниже милливольта) измерения прекращаются и показания счетчика сбрасываются на нуль. В устройстве предусмотрены также меры защиты от перегрузок.
В современных схемах цифровых частотомеров широко применяются синтезаторы частот, создающие сигналы с дискретной сеткой частот. Цифровые частотомеры с программно-управляемыми синтезаторами частот и встроенными микропроцессорами являются перспективными измерительными приборами благодаря высокой точности, широкому диапазону измеряемых частот и удобству включения в автоматизированные измерительные системы.
Дата: 2019-02-25, просмотров: 473.