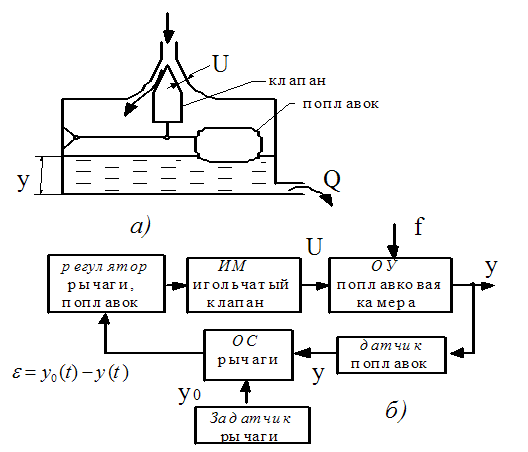
 Самым простым непрерывным законом регулирования является пропорциональный закон или П- закон. На рис. 1а схематично показана поплавковая камера карбюратора двигателя внутреннего сгорания, где используется П- закон регулирования уровня топлива. На рис. 1б представлена функциональная схема данной системы автоматического регулирования. Управляемой величиной y здесь является уровень топлива в камере, а управляющим воздействием U- –площадь открытия игольчатого клапана. Задающее воздействие (уставка) y0 определяется высотой закрепления поплавка. При уменьшении уровня топлива в камере поплавок опускается и перемещает иглу клапана. Чем больше опускается поплавок, тем больше площадь открытия клапана и тем больше поступает топлива в камеру. Таким образом, управляющее воздействие U и разность между заданным значением управляемой величины y0 и ее реальным значением y связаны жестким образом: U прямо пропорциональна
Самым простым непрерывным законом регулирования является пропорциональный закон или П- закон. На рис. 1а схематично показана поплавковая камера карбюратора двигателя внутреннего сгорания, где используется П- закон регулирования уровня топлива. На рис. 1б представлена функциональная схема данной системы автоматического регулирования. Управляемой величиной y здесь является уровень топлива в камере, а управляющим воздействием U- –площадь открытия игольчатого клапана. Задающее воздействие (уставка) y0 определяется высотой закрепления поплавка. При уменьшении уровня топлива в камере поплавок опускается и перемещает иглу клапана. Чем больше опускается поплавок, тем больше площадь открытия клапана и тем больше поступает топлива в камеру. Таким образом, управляющее воздействие U и разность между заданным значением управляемой величины y0 и ее реальным значением y связаны жестким образом: U прямо пропорциональна
 ,
,
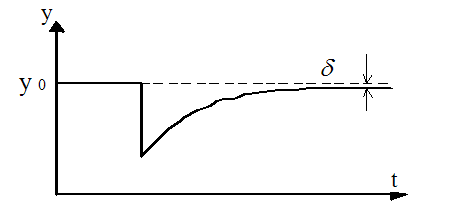
то есть U=k e, где k- коэффициент пропорциональности. На рис. 2 показана кривая регулирования при пропорциональном законе. При внезапном уменьшении уровня (начале расхода) топлива клапан открывается и в камеру начинает поступать топливо. Уровень его начинает монотонно увеличиваться. Однако, если расход топлива продолжается, то через некоторый промежуток времени наступает равновесное состояние: сколько топлива вливается, столько и выливается. Уровень его остается постоянным, но не равным заданному y0. Между ними существует разница, которая называется статической ошибкой d. Чем больше расход топлива, тем больше статическая ошибка. Поэтому системы автоматического регулирования, использующие пропорциональный закон регулирования называют еще статическими системами. Статическая ошибка обусловлена жесткой связью между управляющим воздействием и отклонением управляемой величины от заданного значения. Чтобы избавиться от нее применяются законы регулирования с гибкой связью.
Интегральный закон регулирования (И- закон) математически формулируется следующим образом:
 ,
,
то есть управляющее воздействие является интегральной величиной от отклонения управляемой величины. На рис. 1.10 показана кривая процесса регулирования при использовании интегрального закона регулирования. В этом случае статическая ошибка отсутствует, но наблюдаются значительные колебания управляемой величины относительно заданного значения, которые обусловлены инерционностью объекта управления. Первый выброс в противоположную сторону от установившегося значения принято называть перерегулированиемs. Системы автоматического регулирования без статической ошибки принято называть астатическими системами.
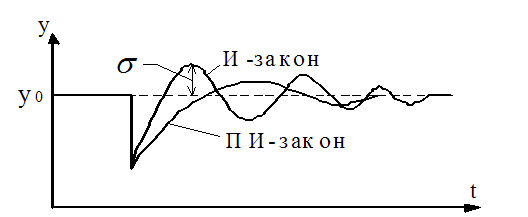 Для уменьшения перерегулирования и колебаний управляемой величины используется пропорционально- интегральный закон (ПИ-закон) регулирования, который представляет собой комбинацию пропорционального и интегрального законов:
Для уменьшения перерегулирования и колебаний управляемой величины используется пропорционально- интегральный закон (ПИ-закон) регулирования, который представляет собой комбинацию пропорционального и интегрального законов:
 .
.
На рис. 1.10 показана кривая регулирования для этого закона.
Для улучшения характеристик регулятора широкое распространение получил более сложный закон регулирования, а именно пропорционально-интегрально-дифференциальный закон регулирования, или ПИД-закон:
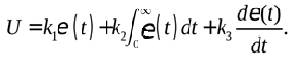
ПИД- закон использует три составляющие регулирования:
Дата: 2019-02-19, просмотров: 383.