IV.1 Обратные связи в системах автоматики
Поддержание регулируемой величины в заданных пределах или изменение ее по заданному закону в процессе работы системы управления и автоматики может быть выполнено по разомкнутому или замкнутому циклам регулирования. Рассмотрим систему (рис. 1), состоящую из последовательно соединенных: объекта регулирования ОР, регулирующего органа РО, регулятора Р и задатчика З — устройства, с помощью которого в систему подается задающее воздействие.
При регулировании по разомкнутому циклу (рис. 1, а) задающее воздействие х(t), поступающее на регулятор от задатчика, не является функцией результата этого воздействия на объект, оно задается оператором. Определенному значению задающего воздействия будет соответствовать определенное текущее значение регулируемой величины у(t), которое будет зависеть от возмущающего воздействия F(t). Объяснение основных терминов смотрите здесь: Общие принципы построения систем автоматики
Разомкнутая система представляет собой по существу передаточную цепь, в которой задающее воздействие х(t) от задатчика после надлежащей обработки регулятором посредством внутренних воздействий Z1(t) и Z2(t) передается объекту регулирования, но обратного воздействия объекта на регулятор нет.
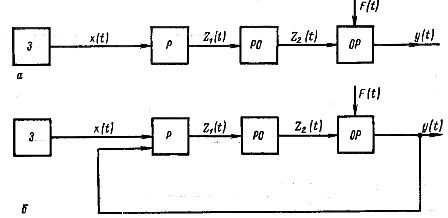
Рис. 1. Схемы регулирования по разомкнутому (а) и замкнутому (б) циклам: З — задатчик, Р — регулятор, РО — регулирующий орган, ОР — объект регулирования, х(t) — задающее воздействие, Z1(t) и Z2(t) — внутренние регулирующие воздействия, у(t) — регулируемая величина, F(t) — возмущающее воздействие.
Примеры регулирования по разомкнутому и замкнутому циклам
На рис. 2, а приведена схема управления частотой вращения двигателя постоянного тока Д. При изменении положения движка реостата Р будет меняться ток возбуждения в обмотке возбуждения ОВГ генератора Г, что приводит к изменению его э. д. с. и, следовательно, напряжения подводимого к двигателю Д.
Тахогенератор ТГ, установленный на одном валу с двигателем Д, развивает э. д. с, пропорциональную частоте вращения со вала двигателя. Вольтметр, подключенный к щеткам тахогенератора, со шкалой, проградуированной в единицах частоты вращения, позволяет осуществлять только визуальный контроль за частотой вращения двигателя.
Если характеристики машин стабильны, то каждому положению движка реостата будет соответствовать определенное значение частоты вращения двигателя. В данной системе имеет место воздействие регулятора на объект, но обратного воздействия нет, т.е. система работает по разомкнутому циклу.
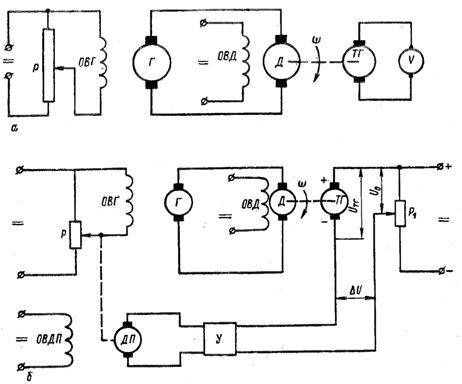
Рис. 2. Принципиальные схемы управления частотой вращения двигателя постоянного тока по разомкнутому (а) к замкнутому (б) циклам: Р — реостат, ОВГ — обмотка возбуждения генератора, Г — генератор, ОВД — обмотка возбуждения двигателя, Д — двигатель, ТГ — тахогенератор, ДП — двигатель привода ползунка реостата, У — усилитель.
Если соединить выход системы с регулятором таким образом, чтобы на регулятор все время поступало два сигнала — сигнал с задатчика и сигнал с выхода объекта, то получим систему, работающую по замкнутому циклу. В такой системе существует воздействие не только регулятора на объект, но и объекта на регулятор.
На рис. 2, б приведена схема управления частотой вращения двигателя Д постоянного тока, в которой выход системы посредством тахогенератора ТГ, реостата Р, усилителя У и двигателя ДП привода ползунка реостата Р соединен с входом системы.
Здесь существует автоматический контроль за частотой вращения двигателя. Любое изменение частоты вращения приведет к появлению сигнала на двигателе ДП, который переместит ползунок реостата Р в ту или другую стороны от положения, соответствующего заданной частоте вращения двигателя Д.
Если частота вращения по какой-либо причине уменьшится, то ползунок реостата Р займет положение, при котором ток возбуждения в обмотке возбуждения ОБ генератора увеличится. Это приведет к увеличению напряжения генератора, а следовательно, и к увеличению частоты вращения двигателя Д, которая примет первоначальное положение.
При увеличении частоты вращения двигателя Д произойдет перемещение ползунка реостата Р в обратном направлении, что и приведет к уменьшению частоты вращения двигателя Д.

Разомкнутая система автоматического регулирования самостоятельно, без вмешательства оператора, не может изменить режим своей работы, если стали иными возмущения, поступающие на систему. Замкнутая система автоматически реагирует на любые изменения, происходящие в системе.
Дата: 2019-02-19, просмотров: 408.