

Рис. 7.3. Нитяной дальномер
Расстояние, измеренное нитяным дальномером, вычисляется по формуле
Д = d¢ + f + d, (7.7)
где d¢ – расстояние от рейки до фокуса,
f – фокусное расстояние объектива зрительной трубы,
d – расстояние от объектива до основной оси теодолита,
а¢в¢ – расстояние между дальномерными нитями,
АВ =  – количество делений на рейке между А и В.
– количество делений на рейке между А и В.
Из подобия DАВF и Dавf: 
где  – коэффициент дальномера, обычно равен 100;
– коэффициент дальномера, обычно равен 100;
f + d = с – постоянная дальномера, обычно равна 0,10 м.
С учетом выше изложенного Д =  . (7.8)
. (7.8)
Для удобства работы подкрашивают рейки таким образом, чтобы К = 100, а с = 0.

Рис. 7.4. Приведение линий к горизонту
Приведение к горизонту расстояний, измеренных дальномером:
если рейка перпендикулярна визирной оси (  = М¢N¢): Д =
= М¢N¢): Д =  ;
;
если рейка отвесна (  = МN): Д =
= МN): Д =  ;
;
если необходимо вычислить горизонтальное проложение:
d =  . (7.9)
. (7.9)
7.4. Дальномерные определения расстояний
 измерения дальномером с постоянным базисом и переменным параллактическим углом
измерения дальномером с постоянным базисом и переменным параллактическим углом
Рис. 7.5. Линия, измеренная дальномером с постоянным базисом
и переменным параллактическим углом: Д = 
 измерения дальномером с постоянным параллактическим углом и переменным базисом
измерения дальномером с постоянным параллактическим углом и переменным базисом


Рис. 7.6. Линия, измеренная дальномером с постоянным
параллактическим углом и переменным базисом: Д =
7.5. Измерение линий оптическими дальномерами (на основе светодальномера)
Электронный тахеометр 3Та5 (рис. 7.7) применяется как для линейных, так и для угловых измерений. Средняя квадратическая погрешность измерения горизонтальных углов тахеометром составляет ± 5².
|

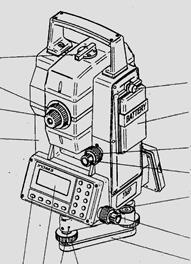
Дальномерная часть прибора выполнена на основе светодальномера. В приборе генерируются электромагнитные колебания высокой частоты, которые модулируются. Образуется сигнал в виде модулированных колебаний или импульсов, который с помощью оптической системы прибора направляется на отражатель. Отражатель (рис. 7.8) возвращает сигнал к прибору. Измеренные углы и расстояния поступают в блок обработки. Высотное положение снятых точек определяется по измеренным углам наклона и расстояниям методом тригонометрического нивелирования.


Рис. 7.8. Одно- и шести призменные отражатели
Тема 8. Теодолитные работы
Принцип измерения горизонтальных и вертикальных углов. Изучение устройства и поверки теодолита типа Т30. Измерение горизонтальных и вертикальных углов. Теодолитные работы
Дата: 2018-12-28, просмотров: 757.