С целью улучшения коммутации и уменьшения искрения щеток в машинах постоянного тока используют следующие средства:
- применяют добавочные полюсы (рис. 11.5). Добавочные полюса помогают компенсировать размагничивающее и искажающее действие поперечной реакции якоря в зоне между главными полюсами. При этом щетки устанавливают линиям геометрических нейтралей и оставляют в этом положении при всех нагрузках.
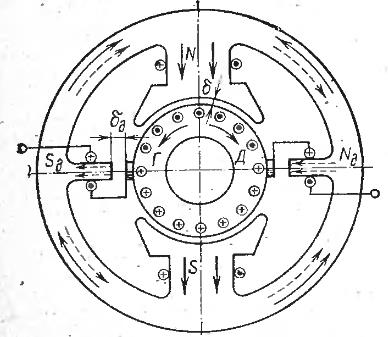
Рис.11.5. Установка добавочных полюсов в двухполюсной машине
- В машинах без добавочных полюсов сдвигают щетки с геометрической нейтрали на определенный угол. (рис. 11.6.). Для создания хорошей коммутации необходимо сдвигать щетки с геометрической нейтрали по направлению вращения якоря в генераторном режиме и против направления вращении в режиме двигателя.
Недостаток рассмотренного метода в том, что коммутирующее поле не изменяется автоматически пропорционально току якоря, и наилучшие условия коммутации получаются лишь при определенной нагрузке машины. При других нагрузках условия коммутации получаются менее благоприятными. Осуществить автоматическое изменение сдвига щеток при изменениях нагрузки практически невозможно.
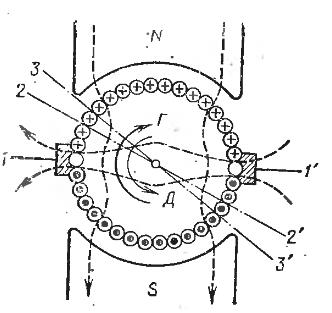
Рис.11.5. Сдвиг щеток для улучшения коммутации.
- Подбор щеток с соответствующими характеристиками. При выборе марки щеток часто приходится находить компромиссное решение взаимно противоречивых требований. Например, с точки зрения улучшения коммутации выгодно выбирать твердые сорта щеток. Однако это приводит к повышенному износу коллектора и к увеличению размеров всего щеточного аппарата и коллектора вследствие меньшей допустимой плотности тока этих сортов щеток. В настоящее время в машинах обычного исполнении широко применяют графитные щетки, в машинах с более тяжелым режимом работы — угольно - графитные и электро - графитные, в низковольтных машинах— медно- или бронзо - графитные.
- Применяют компенсационную обмотку (рис. 11.6). В пазу полюсных наконечников укладывают изолированные проводники, которые соединяют так, что они образуют обмотку с магнитной осью, совпадающей с геометрической нейтралью. Компенсационную обмотку включают последовательно с обмоткой якоря.
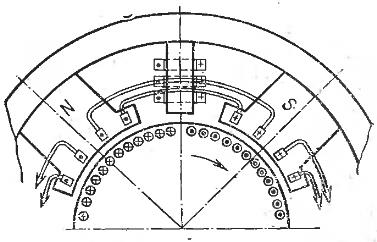
Рис.11.6. Компенсационная обмотка
46. Двигатели постоянного тока независимого, параллельного возбуждения.
Двигатели постоянного тока преобразуют электрическую энергию постоянного тока в механическую. Несмотря на успехи в создании статических полупроводниковых преобразователей и внедрение регулируемых электроприводов переменного тока, производство двигателей постоянного тока в процентном отношении к двигателям переменного тока не сокращается, и они находят новые области применения.
Двигатели постоянного тока допускают плавное и экономичное регулирование скорости вращения. Это преимущество перед двигателями переменного тока обеспечивает применение двигателей постоянного тока в электроприводах с широким диапазоном изменения скорости вращения. Двигатели постоянного тока находят применение в приводах прокатных станов, станков, на транспорте и в других системах автоматизированного электропривода.
По способу возбуждения двигатели постоянного тока, так же как и генераторы, делятся на двигатели независимого, параллельного, последовательного и смешанного возбуждения. Двигатели независимого возбуждения могут быть разделены на двигатели с электромагнитным возбуждением, когда обмотка возбуждения подключена к постороннему источнику постоянного тока или на зажимы двигателя, и на двигатели с магнитоэлектрическим возбуждением, когда вместо обмотки возбуждения используются постоянные магниты.
Двигатель постоянного тока потребляет электрическую мощность P1 из сети. Часть этой мощности расходуется на электрические потери в обмотке возбуждения Рв, электрические потери в обмотке якоря Рэа и электрические потери в контакте щеток Рэщ, а остальная ее часть передается магнитным полем к якорю. Эта мощность называется электромагнитной:
 .(1)
.(1)
Электромагнитная мощность РЭМ расходуется на покрытие потерь в стали магнитопровода якоря РМ (Рст) , механических РМХ и добавочных Рд потерь. Оставшаяся ее часть Р2 является полезной механической мощностью на валу двигателя:
 ,(2)
,(2)
где
 .(3)
.(3)
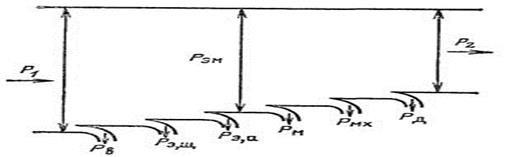
Рис. 1. Энергетическая диаграмма двигателя постоянного тока
Различают два вида потерь — основные и добавочные. Основные потери разделяются на магнитные, механические и электрические.
Магнитные потери  происходят только в сердечнике якоря, так как только этот элемент магнитопровода машины постоянного тока подвергается перемагничиванию. Величина магнитных потерь состоит из потерь от гистерезиса и потерь от вихревых токов и зависит от частоты перемагничивания
происходят только в сердечнике якоря, так как только этот элемент магнитопровода машины постоянного тока подвергается перемагничиванию. Величина магнитных потерь состоит из потерь от гистерезиса и потерь от вихревых токов и зависит от частоты перемагничивания  , значений магнитной индукции в зубцах и спинке якоря, толщины листов электротехнической стали, ее магнитных свойств и качества изоляции этих листов в пакете якоря.
, значений магнитной индукции в зубцах и спинке якоря, толщины листов электротехнической стали, ее магнитных свойств и качества изоляции этих листов в пакете якоря.
Механические потери обусловлены потерями на вентиляцию, трением вращающихся частей машины — трением в подшипниках,трением щеток о коллектор. Величина механических потерь зависит от скорости вращения якоря.
Магнитные и механические потери называют постоянными потерями, так как мощность этих потерь не зависит от нагрузки машины.
Аналитический расчет магнитных и механических потерь — сложная задача и не дает достаточной точности. Для определения этих потерь иногда пользуются экспериментальным методом.
2.2. Опыт холостого хода
Данный опыт даёт возможность изучить свойства магнитной цепи машины, определить возникающие при холостом ходе потери и механические свойства двигателя при питании от источника регулируемого напряжения.
Включают машину на холостом ходу в двигательный режим. При этом измеряют ток якоря Ia0 в режиме холостого хода и подведенное напряжение U0 и определяют мощность холостого хода Р0 в цепи якоря (Вт), которая представляет собой сумму магнитных (Рм ) и механических потерь:
 .(4)
.(4)
Потери в цепи возбуждения определяются потерями в обмотке возбуждения и в реостате, включенном в цепь возбуждения:
 или PB = I2B·RB , (5)
или PB = I2B·RB , (5)
здесь Uв — напряжение цепи возбуждения, RB = 440 Ом.
2.3. Опыт короткого замыкания
Данный опыт даёт возможность определить электрические потери возникающие в обмотках цепи якоря и в щеточном контакте машины постоянного тока при питании от источника регулируемого напряжения.
Электрические потери в обмотках цепи якоря и в щеточном контакте машины постоянного тока называют переменными, так как их величина зависит от нагрузки машины и обусловлена нагревом обмоток и щеточного контакта.
Потери в цепи якоря определяются по формуле:
 , (6)
, (6)
где  - сопротивление цепи якоря, приведенное к расчетной рабочей температуре
- сопротивление цепи якоря, приведенное к расчетной рабочей температуре
 , (7)
, (7)
где r/ — активное сопротивление при температуре Т1,
Т2 – рабочая температура двигателя,
α = 0,004 – температурный коэффициент меди.
Электрические потери в контакте щеток:
 , (8)
, (8)
где  — переходное падение напряжения на щетках, принимаемое в соответствии с маркой щеток.
— переходное падение напряжения на щетках, принимаемое в соответствии с маркой щеток.
2.4. Коэффициент полезного действия
В машинах постоянного тока имеется ряд трудно учитываемых потерь — добавочных. Поэтому, согласно ГОСТ, для двигателей без компенсационной обмотки значение добавочных потерь Рд принимают равным 1% от подводимой мощности. В машинах с компенсационной обмоткой значение добавочных потерь принимают равным 0,5%.
Мощность (Вт) для двигателя постоянного тока (электрическая мощность или подводимая мощность):
 . (9)
. (9)
Коэффициент полезного действия электрической машины представляет собой отношение мощностей отдаваемой (полезной) к подводимой (потребляемой):
 . (10)
. (10)
Обычно КПД машин постоянного тока составляет 0,75—0,9 для машин мощностью от 1 до 100 кВт и 0,9—0,97 для машин мощностью свыше 100 кВт. У машин постоянного тока малой мощности КПД намного меньше.
Коэффициент полезного действия электрической машины можно определять:
а) методом непосредственной нагрузки по результатам измерений подведенной P1 и отдаваемой P2 мощностей;
б) косвенным методом по результатам измерений потерь.
Метод непосредственной нагрузки применим только для машин малой мощности, для остальных случаев применяется косвенный метод, как более точный и удобный.
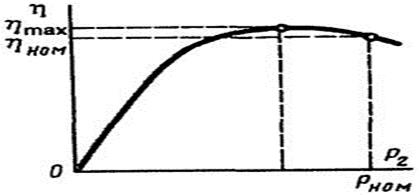
Рис. 2. Зависимость η = f(Р2)
Существует несколько косвенных способов определения КПД. Наиболее прост способ холостого хода двигателя, когда потребляемая машиной постоянного тока мощность затрачивается только на потери холостого хода. Что же касается электрических потерь, то их определяют расчетным путем после предварительного измерения электрических сопротивлений обмоток и приведения их к рабочей температуре.
2.5. Принцип действия двигателя постоянного тока
Электрические машины обладают свойством обратимости, т. е. они могут работать как в режиме генератора, так и в режиме двигателя. Поэтому если машину постоянного тока подключить к источнику энергии постоянного тока, то в обмотке возбуждения и в обмотке якоря машины появятся токи. Взаимодействие тока якоря с полем возбуждения создает на якоре вращающий электромагнитный момент Мэм.:
 , (11)
, (11)
где ω – угловая частота вращения якоря (рад/с).
Под действием электромагнитного момента якорь машины начнет вращаться, т. е. машина будет работать в режиме двигателя. В процессе работы двигателя его якорь вращается в магнитном поле. В обмотке якоря индуцируется ЭДС Еа , направление которой определяют по правилу «правой руки». В двигателе ЭДС направлена против тока Ia , и поэтому ее называют противо-ЭДС якоря.
Для двигателя, работающего с постоянной частотой вращения, подведенное к двигателю напряжение уравновешивается противо-ЭДС обмотки якоря и падением напряжения в цепи якоря:
 . (12)
. (12)
На основании (12) ток якоря определяется по формуле:
 . (13)
. (13)
Умножив обе части уравнения (12) на ток якоря Ia , получим уравнение мощности для цепи якоря:
 , (14)
, (14)
где  — электрическая мощность, подводимая к якорю,
— электрическая мощность, подводимая к якорю,
 — мощность электрических потерь в цепи якоря,
— мощность электрических потерь в цепи якоря,
 - электромагнитная мощность, представляющая собой полную электрическую мощность, которая преобразуется в полезную механическую мощность и расходуется на покрытие магнитных (потери в стали якоря), механических и добавочных потерь.
- электромагнитная мощность, представляющая собой полную электрическую мощность, которая преобразуется в полезную механическую мощность и расходуется на покрытие магнитных (потери в стали якоря), механических и добавочных потерь.
2.6. Пуск двигателя
Ток якоря двигателя определяется формулой (13). Если принять U и  неизменными, то ток Iа зависит от противо-ЭДС Еа. В начальный момент пуска якорь двигателя неподвижен (n = 0) и в его обмотке не индуцируется ЭДС (Еа = 0). Поэтому при непосредственном подключении двигателя к сети в обмотке его якоря возникает пусковой ток:
неизменными, то ток Iа зависит от противо-ЭДС Еа. В начальный момент пуска якорь двигателя неподвижен (n = 0) и в его обмотке не индуцируется ЭДС (Еа = 0). Поэтому при непосредственном подключении двигателя к сети в обмотке его якоря возникает пусковой ток:
 . (15)
. (15)
Обычно сопротивление ra невелико, поэтому значение пускового тока достигает недопустимо больших значений, в 10—20 раз превышающих номинальный ток двигателя. Такой большой пусковой ток весьма опасен для двигателя.
Во-первых, он может вызвать в машине круговой огонь, а во-вторых, при таком токе в двигателе развивается чрезмерно большой пусковой момент, который оказывает ударное действие на вращающиеся части двигателя и может механически их разрушить. Этот ток вызывает резкое падение напряжения в сети, что неблагоприятно отражается на работе других потребителей, включенных в эту сеть.
Поэтому пуск двигателя непосредственным подключением в сеть обычно применяют для двигателей мощностью не более 1,0 кВт. В этих двигателях благодаря повышенному сопротивлению обмотки якоря и небольшим вращающимся массам значение пускового тока лишь в (3—5) раз превышает номинальный, что не представляет опасности для двигателя. Что же касается двигателей большей мощности, то при их пуске для ограничения пускового тока используют пусковые реостаты, включаемые последовательно в цепь якоря (реостатный пуск).
По мере разгона якоря двигателя ступени пускового реостата R плавно выводятся, и пуск двигателя заканчивается. Сопротивление пускового реостата R выбирают обычно таким, чтобы пусковой ток не превышал номинальный более чем в 2—3 раза.
Для пуска двигателей большей мощности применять пусковые реостаты нецелесообразно, так как это вызывает значительные потери энергии. Кроме того, пусковые реостаты обладают большими массогабаритными показателями. Поэтому в двигателях большой мощности применяют пуск двигателя путем понижения напряжения.
2.7. Характеристики двигателей постоянного тока параллельного и независимого возбуждения
Основными характеристиками, по которым оцениваются рабочие свойства двигателя, являются:
− скоростная характеристика (электромеханическая) n = f(Ia) — зависимость скорости вращения якоря от тока якоря;
− моментная характеристика Mэм = f(Ia) — зависимость электромагнитного момента от тока якоря;
− механическая характеристика n = f(Mэм) — зависимость скорости вращения якоря от электромагнитного момента.
При снятии характеристик нагрузочный момент изменяют от нуля до 1,1—1,2Мном.
Номинальный момент Мном, Н·м, определяют по формуле
 , (16)
, (16)
где  − номинальная угловая частота вращения якоря определяется по формуле
− номинальная угловая частота вращения якоря определяется по формуле
 .(рад/сек.) (17)
.(рад/сек.) (17)
ЭДС двигателя определяется по формуле
 , (18)
, (18)
тогда скорость вращения якоря двигателя (об/мин)
 . (19)
. (19)
Подставив значение Еа из (12), получим выражение скоростной характеристики
 , (20)
, (20)
т. е. скорость вращения якоря двигателя прямо пропорциональна напряжению и обратно пропорциональна магнитному потоку возбуждения.
Если к валу машины не будет приложен нагрузочный момент (М2 = 0), то двигатель будет работать на холостом ходу, при этом ток в якоре Ia = I0, а скорость n = n0. Ток I0 — ток холостого хода — создает электромагнитный момент Мо, необходимый для преодоления существующего в самом двигателе тормозного момента, обусловленного силами трения и магнитными потерями. Этот ток относительно мал и составляет (2—5)% от номинального.
Работа двигателя при М = 0 и Iа = 0 называется идеальным холостым ходом. Согласно (20) скорость при идеальном холостом ходе равна:
 .(об/мин) (21)
.(об/мин) (21)
Изменение скорости вращения двигателя при переходе от номинальной нагрузки к холостому ходу, выраженное в процентах, называют номинальным изменением скорости вращения якоря:
 .(% ) (22)
.(% ) (22)
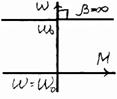
В двигателях параллельного и независимого возбуждения
изменение скорости при переходе от холостого хода к номинальной нагрузке мало и составляет (2—5)%. Такие слабо падающие скоростные и механические характеристики называются жесткими.
Скоростную характеристику двигателя n = f(Ia) снимают при Iв = Iвном = const и U = Uном = const. Номинальный ток возбуждения Iвном
устанавливают так, чтобы обеспечить номинальную скорость nном при Iа = Iаном и номинальном подведенном напряжении Uном .
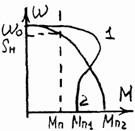
Скоростные характеристики показаны на рис. 3. Их анализ проведем, исходя из уравнения (20).
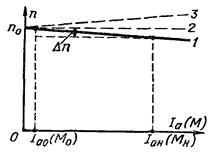
Рис. 3. Скоростные характеристики двигателя постоянного тока параллельного и независимого возбуждения
При U = Uном = const на скорость якоря будут оказывать влияние два фактора: падение напряжения в цепи якоря и размагничивающее действие реакции якоря, уменьшающее поток. Поток двигателя при нагрузке
 , (23)
, (23)
где Ф0 — поток, созданный током возбуждения;  — уменьшение потока из-за размагничивающего действия поперечной реакции якоря. Тогда при возрастании тока якоря падение напряжения
— уменьшение потока из-за размагничивающего действия поперечной реакции якоря. Тогда при возрастании тока якоря падение напряжения  будет стремиться уменьшить скорость, а — увеличить.
будет стремиться уменьшить скорость, а — увеличить.
Вид скоростной характеристики зависит от того, какой из этих факторов будет действовать сильнее. При более сильном влиянии падения напряжения характеристика имеет падающий характер сплошная линия на (рис. 3), а если будет преобладать действие реакции якоря, то она может иметь возрастающий характер (штриховые линии). Нормальная работа двигателя возможна только при падающей характеристике.
Моментную характеристику двигателя Mэм = f(Ia) снимают при Iв = const. Зависимость электромагнитного момента от тока якоря описывается уравнением:
 . (24)
. (24)
Если бы при Iв = const поток Ф оставался постоянным, то момент был бы пропорционален току якоря Ia и моментная характеристика представляла бы прямую линию, выходящую из начала координат (штриховая прямая на
рис. 4).
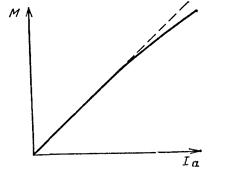
Рис. 4. Моментная характеристика двигателя постоянного
тока независимого возбуждения
Действительная характеристика из-за уменьшения потока вследствие размагничивающего действия реакции якоря пойдет ниже, и будет отклоняться от линейной зависимости (сплошная линия на рис. 4). Однако расхождение между этими характеристиками невелико и во многих практических расчетах может не учитываться.
Механическую характеристику двигателя n = f(Mэм) снимают при Iв = const и U = Uном = const. Выразим ток Iа из выражения (24):
 . (25)
. (25)
Подставив (25) в (20), получим аналитическое выражение механической характеристики:
 . (26)
. (26)
Вид механической характеристики двигателя параллельного и независимого возбуждения такой же, как и у скоростной характеристики. Если принять пропорциональную зависимость между моментом и током якоря, то при одних и тех же значениях U и Iв скоростная характеристика в другом масштабе будет являться и механической характеристикой.
Рабочие характеристики двигателя М, P1, Iа, n, η = f(P2) снимают при Iв = const и U = Uном = const.
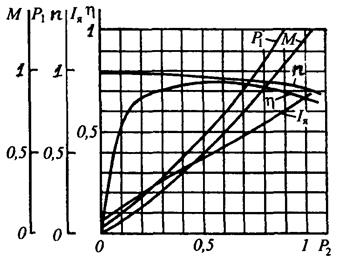
Рис. 5. Рабочие характеристики двигателя постоянного
тока параллельного и независимого возбуждения
С увеличением нагрузки на валу двигателя Р2 растет момент двигателя М, а скорость вращения n немного падает. Увеличение нагрузки приводит к росту мощности P1, забираемой из сети, и росту тока якоря Iа. При холостом ходе (Р2 = 0) КПД = О, затем с увеличением Р2 сначала КПД быстро растет, но в связи с большим ростом потерь в цепи якоря при больших нагрузках снова начинает уменьшаться.
Направление вращения якоря зависит от направлений магнитного потока возбуждения Ф и тока в обмотке якоря. Поэтому, изменив направление какой-либо из указанных величин, можно изменить направление вращения якоря.
2.8. Устойчивость двигателя
Важно, чтобы работа двигателя вместе с производственным механизмом протекала устойчиво. Под устойчивой работой двигателя понимается его способность вернуться в исходную точку равновесия после кратковременного действия возмущающих сил, нарушивших это равновесие. Оценку устойчивости производят из совместного рассмотрения механических характеристик двигателя и производственного механизма.
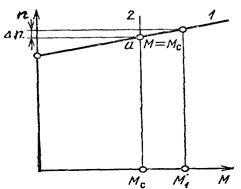
Рис. 6. К определению устойчивости работы двигателя
совместно с механизмом
Работа двигателя может быть устойчивой и неустойчивой.
Неустойчивая работа будет наблюдаться при возрастающих механических характеристиках двигателя. На рис. 6 показана такая характеристика двигателя (прямая 1). Там же дана механическая характеристика для механизма, приводимого во вращение двигателем (прямая 2). Для него принята зависимость Мс = М2 = const, являющаяся типичной для целого ряда механизмов (подъемные краны, механизмы подачи для металлорежущих станков и т. д.). Пересечение этих прямых является точкой равновесия моментов М = Мс и соответствует установившемуся режиму работы.
Предположим, что в результате действия каких-либо возмущающих сил скорость увеличится на Δn. Тогда момент двигателя увеличится до М1 и возникнет положительный динамический момент, так как М1—Mc > 0. Под действием избыточного момента двигателя скорость n начнет нарастать, разность (М—Мс) еще больше увеличится, что приведет к дальнейшему возрастанию скорости, и т. д. Если в результате возмущения скорость уменьшится, то (М—Мс) < 0 и скорость будет непрерывно уменьшаться. Отсюда следует, что точка а является точкой неустойчивого равновесия и, следовательно, нормальная работа двигателя с возрастающей механической характеристикой невозможна.
Аналогичным путем можно показать что при падающей механической характеристике работа будет проходить устойчиво, так как всякое отклонение скорости на ±Δn вызывает появление избыточного момента, направленного на восстановление равновесия. В общем виде критерием устойчивой работы является неравенство
 . (27)
. (27)
Иногда при проектировании двигателей в целях уменьшения его размеров и массы принимают повышенные значения линейной нагрузки А и индукции в воздушном зазоре Вδ. В таких двигателях сильно проявляется
размагничивающее действие реакции якоря и получить у них падающую механическую характеристику не удается. Тогда предусматривают специальную обмотку возбуждения (стабилизирующую обмотку), располагаемую на полюсах и включаемую последовательно с якорем. Она имеет всего несколько витков и предназначается для компенсации размагничивающего действия реакции якоря. При наличии такой обмотки поток машины практически не будет изменяться с ростом тока якоря — он будет стабилизирован. Механическая характеристика такой машины будет падающей.
47. Уравнения электрического состояния машины постоянного тока в двигательном и генераторном режимах.
????? ПЕЧАЛЬКА ????????????????????
48. Конструкция и принцип действия синхронной машины.
· неподвижной - статора
· вращающейся – ротора
Синхронная машина имеет две основные обмотки.
Одна обмотка подключается к источнику постоянного тока. Протекающий по этой обмотке ток создает основное магнитное поле машины. Эта обмотка располагается на полюсах и называется обмоткой возбуждения.
Иногда у машин небольшой мощности обмотка возбуждения отсутствует, а магнитное поле создается постоянными магнитами.
Другая обмотка является обмоткой якоря. В ней индуктируется основная ЭДС машины. Она укладывается в пазы якоря и состоит из одной, двух или трех обмоток фаз. Наибольшее распространение в синхронных машинах нашли трехфазные обмотки якоря.
В синхронных машинах чаще всего находит применение конструкция, при которой, обмотка якоря располагается на статоре, а обмотка возбуждения - на роторе (рис.34.1). Синхронные машины небольшой мощности иногда имеют обращенное исполнение, когда обмотка якоря располагается на роторе, а обмотка возбуждения - на полюсах статора (рис. 34.2). В электромагнитном отношении обе конструкции равноценны.
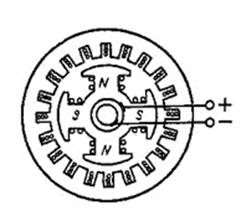
Рис. 34.1. Конструктивный вариант синхронной машины, при котором обмотка якоря располагается на статоре, а обмотка возбуждения – на роторе.
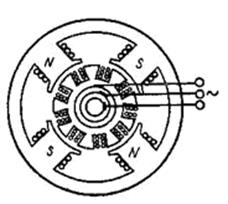
Рис. 34.1. Конструктивный вариант синхронной машины, при котором обмотка якоря располагается на роторе, а обмотка возбуждения – на статоре.
Однако из практических соображений более предпочтительной является первая конструкция, так как в этом случае к скользящим контактам на роторе подводится мощность возбуждения, составляющая 0,3-3 % номинальной мощности машины.
Во втором варианте скользящие контакты следовало бы рассчитывать на полную мощность машины. Для мощных машин, имеющих относительно высокое напряжение и большие токи, обеспечить удовлетворительную работу таких контактов весьма затруднительно.
В дальнейшем будут рассматриваться синхронные машины, выполненные по первому (основному) конструктивному варианту.
Рассмотрим принцип действия синхронного генератора. Если через обмотку возбуждения протекает постоянный ток, то он создает постоянное во времени магнитное поле с чередующейся полярностью. При вращении полюсов и, следовательно, магнитного поля относительно проводников обмотки якоря в них индуктируются переменные ЭДС, которые, суммируясь, определяют результирующие ЭДС фаз.
Если на якоре уложены три одинаковые обмотки, магнитные оси которых сдвинуты в пространстве на электрический угол, равный 120°, то в этих обмотках индуктируются ЭДС, образующие трехфазную систему.
Частота индуктируемых в обмотках ЭДС зависит от числа пар полюсов р и частоты вращения ротора п:

Для получения ЭДС необходимой частоты число пар полюсов и частота вращения должны находиться в определенной зависимости между собой.
Так, для получения стандартной частоты f1= 50 Гц при р=1нужно иметь частоту вращения n = 3000 об/мин, а при р = 24 n = 125 об/мин.
Если к трехфазной обмотке якоря синхронного генератора подсоединить нагрузку, то возникший ток создаст вращающееся магнитное поле якоря. Частота вращения этого поля относительно статора

Заменяя в этой формуле частоту ее значением из предыдущей формулы, получаем
n 1 = n.
Равенство частот вращения ротора пи поля якоря n1 является характерной особенностью синхронной машины, обусловившей ее название.
При работе синхронной машины двигателем трехфазная обмотка якоря присоединяется к трехфазной сети. При этом образуется вращающееся магнитное поле с частотой вращения n1. Это поле, взаимодействуя с полем полюсов ротора, создает вращающий момент. Чтобы этот момент имел одно и то же направление, поля должны быть неподвижны относительно друг друга. Это имеет место, если ротор и, следовательно, его магнитное поле вращаются с частотой, равной n1. Поэтому в синхронном двигателе ротор как при холостом ходе, так и при нагрузке вращается с постоянной частотой, равной частоте вращения поля n1.
49. Основные характеристики синхронного генератора.
Свойства синхронного генератора определяются характеристиками холостого хода, короткого замыкания, внешними и регулировочными.
Характеристика холостого хода синхронного генератора.Представляет собой график зависимости напряжения на выходе генератора в режиме х.х. U1 = Е0 от тока возбуждения Iв.0 при n1 = const. Схема включения синхронного генератора для снятия характеристики х.х. приведена на рис. 20.9, а. Если характеристики х.х. различных синхронных генераторов изобразить в относительных единицах Е* = f (Iв*), то эти характеристики мало отличаются друг от друга и будут очень схожи с нормальной характеристикой х.х. (риc. 20.9, б), которую используют при расчетах синхронных машин:
| E* | 0,58 | 1,0 | 1,21 | 1,33 | 1,40 | 1,46 | 1,51 |
| Iв* | 0,5 | 1,0 | 1,5 | 2,0 | 2,5 | 3,0 | 3,5 |
Здесь E* = Е0 / U1ном — относительная ЭДС фазы обмотки статора;
Iв* = Iв0 /Iв0ном — относительный ток возбуждения; Iв0ном — ток возбуждения в режиме х.х., соответствующий ЭДС х.х. Е0 = U1ном
Характеристика короткого замыкания.Характеристику трехфазного к.з. получают следующим образом: выводы обмотки статора замыкают накоротко (рис. 20.10, а) и при вращении ротора с частотой вращения n1 постепенно увеличивают ток возбуждения до значения, при котором ток к.з. превышает номинальный рабочий ток статорной обмотки не более чем на 25% (I1к = l,25 I1ном). Так как в этом случае ЭДС обмотки статора имеет значение, в несколько раз меньшее, чем в рабочем режиме генератора, и, следовательно, основной магнитный поток весьма мал, то магнитная цепь машины оказывается ненасыщенной. По этой причине характеристика к.з. представляет собой прямую линию (рис. 20.10, б). Активное сопротивление обмотки статора невелико по сравнению с ее индуктивным сопротивлением, поэтому, принимая r1 ≈ 0, можно считать, что при опыте к.з. нагрузка синхронного генератора (его собственные обмотки) является чисто индуктивной. Из этого следует, что при опыте к.з. реакция якоря синхронного генератора имеет продольно-размагничивающий характер (см. § 20.3).
Векторная диаграмма, построенная для генератора при опыте трехфазного к.з., представлена на рис. 20.10, в. Из диаграммы видно, что ЭДС  индуцируемая в обмотке статора, полностью уравновешивается ЭДС продольной реакции якоря
индуцируемая в обмотке статора, полностью уравновешивается ЭДС продольной реакции якоря  и ЭДС рассеяния
и ЭДС рассеяния  .
.
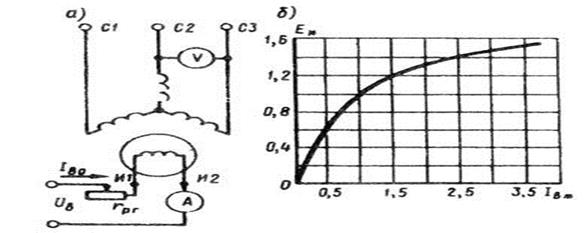
Рис. 20.9. Опыт холостого хода синхронного генератора
При этом МДС обмотки возбуждения имеет как бы две составляющие: одна компенсирует падение напряжения  , а другая компенсирует размагничивающее влияние реакции якоря
, а другая компенсирует размагничивающее влияние реакции якоря  .
.
Характеристики к.з. и х.х. дают возможность определить значения токов возбуждения, соответствующие указанным составляющим МДС возбуждения. С этой целью характеристики х.х. и к.з. строят в одних осях (рис. 20.11), при этом на оси ординат отмечают относительные значения напряжения х.х. Е* = E0/ U1номи тока к.з. Iк* = I1к/ I1ном. На оси ординат откладывают отрезок ОВ, выражающий в масштабе напряжения относительное значение ЭДС рассеяния  . Затем точку В сносят на
. Затем точку В сносят на
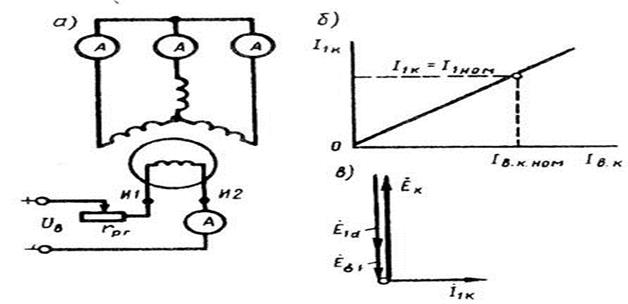
Рис. 20.10. Опыт короткого замыкания синхронного генератора
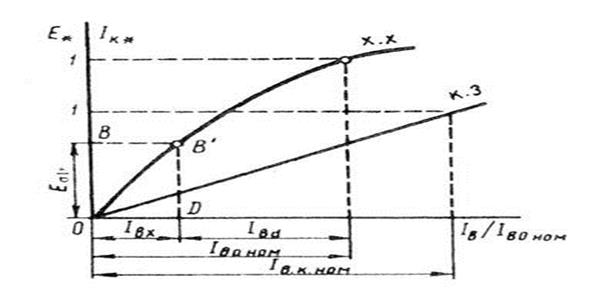 Рис. 20.11. Определение составляющих тока к.з.
Рис. 20.11. Определение составляющих тока к.з.
характеристику х.х. (точка В') и опускают перпендикуляр B'D на ось абсцис. Полученная точка D разделила ток возбуждения Iв0ном на две части: Iвх — ток возбуждения, необходимый для компенсации падения напряжения , и  — ток возбуждения, компенсирующий продольно-размагничивающую реакцию якоря.
— ток возбуждения, компенсирующий продольно-размагничивающую реакцию якоря.
Один из важных параметров синхронной машины — отношение короткого замыкания (ОКЗ), которое представляет собой отношение тока возбуждения Iв0ном, соответствующего номинальному напряжению при х.х., к току возбуждения Iв.к.ном соответствующему номинальному току статора при опыте к.з. (рис. 20.10, б):
OK 3 = IB 0 HOM / IB . K . HOM . (20.34)
Для турбогенераторов ОКЗ = 0,4 ÷ 0,7; для гидрогенераторов ОКЗ = 1,0 ÷ 1,4.
ОКЗ имеет большое практическое значение при оценке свойств синхронной машины: машины с малым ОКЗ менее устойчивы при параллельной работе (см. гл. 21), имеют значительные колебания напряжения при изменениях нагрузки, но такие машины имеют меньшие габариты и, следовательно, дешевле, чем машины с большим ОКЗ.
Внешняя характеристика.Представляет собой зависимость напряжения на выводах обмотки статора от тока нагрузки: U1 = f (I1) при Iв = const; соs φ1, = const; n1 = nном = const. На рис. 10.12, а представлены внешние характеристики, соответствующие различным по характеру нагрузкам синхронного генератора.
При активной нагрузке (соs φ1 = 1) уменьшение тока нагрузки I1 сопровождается ростом напряжения U1, что объясняется уменьшением падения напряжения в обмотке статора и ослаблением размагничивающего действия реакции якоря по поперечной оси. При индуктивной нагрузке (cos φ1 < 1; инд.) увеличение U1при сбросе нагрузки более интенсивно, так как с уменьшением тока I1 ослабляется размагничивающее действие продольной составляющей реакции якоря (см. § 20.3). Однако в случае емкостной нагрузки генератора (cos φ1 < 1; емк.) уменьшение I1 сопровождается уменьшением напряжения U1, что объясняется ослаблением подмагничивающего действия продольной составляющей реакции якоря.
Изменение напряжения синхронного генератора, вызванное сбросом номинальной нагрузки при Iв = const и n1 = const, называется номинальным изменением (повышением) напряжения (%):
 (20.35)
(20.35)
При емкостной нагрузке генератора сброс нагрузки вызывает уменьшение напряжения, а поэтому ΔU1ном отрицательно.
В процессе эксплуатации синхронного генератора напряжение U1 при колебаниях нагрузки поддерживается неизменным посредством быстродействующих автоматических регуляторов. Однако во избежание повреждения изоляций обмотки ΔUном, не должно превышать 50%.
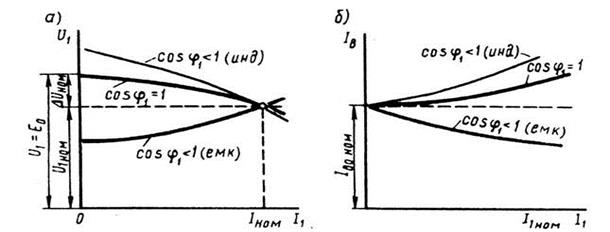 Рис. 20.12. Внешние (а) и регулировочные (б) характеристики синхронного генератора
Рис. 20.12. Внешние (а) и регулировочные (б) характеристики синхронного генератора
Регулировочная характеристика. Она показывает, как следует изменять ток возбуждения генератора при изменениях нагрузки, чтобы напряжение на зажимах генератора оставалось неизменно равным номинальному: Iв = f (I1) при U1 = U1ном = const; n1 = nном = const и cos φ1 = const. На рис. 20.12, б представлены регулировочные характеристики синхронного генератора. При активной нагрузке (соs φ1 = 1) увеличение тока нагрузки I1 сопровождается уменьшением напряжения U1, поэтому для поддержания этого напряжения неизменным по мере увеличения тока нагрузки I1 следует повышать ток возбуждения. Индуктивный характер нагрузки (cos φ1 < 1;инд.) вызывает более резкое понижение напряжения U1 (рис. 20.12, а), поэтому ток возбуждения Iв, необходимый для поддержания U1 = U1ном следует повышать в большей степени. При емкостном же характере нагрузки (cos φ1 < 1; емк.) увеличение нагрузки сопровождается ростом напряжения U1, поэтому для поддержания U1 = U1ном ток возбуждения следует уменьшать.
50. Устройство и принцип действия синхронного двигателя. Вывод зависимости электромагнитного момента от нагрузки.
Трехфазные асинхронные двигатели составляют основу современного электропривода. От ДПТ их отличает простота конструкции, надежность, высокие технико-экономические показатели. В настоящее время частотные преобразователи позволили сделать регулировочные свойства АД более лучшими, чем у ДПТ с НВ.
По конструкции ротора АД разделяются на двигатели и короткозамкнутым ротором (КЗР) и двигатели с фазным ротором (ФР). Наиболее простая конструкция у АД с КЗР. Ротор такого двигателя не имеет выводов, так как его обмотка выполнена в виде короткозамкнутой клетки (беличья клетка). Его обмотка выполнена в виде ряда медных или алюминиевых стержней, расположенных по периметру сердечника ротора, замкнутые в двух сторон короткозамыкающими кольцами. Простота конструкции обеспечивает им высокую надежность, простоту обслуживания и невысокую стоимость. Схема включения АД СС КЗР представлена на рис. 4.1, а.
Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора (рис. 4.1, б). Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора. Такие двигатели более сложны в изготовлении и эксплуатации, поэтому применяются только там, где применение АД с КЗР не обеспечит требованиям в приводу механизма.
Ротор АД отстаёт от вращающегося магнитного поля статора, которое создается обмоткой статора, то есть вращение происходит асинхронно. В этих условиях вращающееся поле статора индуцирует ЭДС в обмотке роторе, под действием которого в роторе протекает ток, который взаимодействует с вращающимся магнитным полем (ВМП), создавая вращающий момент двигателя. В рабочих режимах разница частот вращения статора и ротора не велика и составляет несколько процентов. При рассмотрение рабочих процессов АД обычно используют понятие скольжения 
 .
.
Скорость асинхронного двигателя в рабочих режимах
 ,
,
где синхронная частота вращения магнитного поля  ;
;  – частота питающего напряжения
– частота питающего напряжения  ;
;  – число пар полюсов.
– число пар полюсов.
|
| Рис. 4.1. Схема включения асинхронных двигателей с КЗР (а) и ФР (б) |
Статор синхронного двигателя (СД) конструктивно не отличается от статора АД. Ротор СД имеет явнополюсную конструкцию, на полюсах которого расположена обмотка возбуждения. При включении обмотки к источнику постоянного тока в двигателе создается дополнительное магнитное поле. Таким образом, для работы синхронного двигателя кроме 3х-фазного переменного напряжения требуется также постоянное. Исключение составляют двигатели, возбуждаемые постоянными магнитами. Такие двигатели обладают абсолютно жесткой механической характеристикой: ротор двигателя вращается синхронно с вращающимся магнитным полем с частотой  .
.
|
| Рис. 4.2. Схема включения СД |
В отличие от АД, синхронные не создают пускового момента, так как ротор двигателя по причине инерционности не может мгновенно разогнаться до синхронной скорости. Для пуска СД необходимо предварительно привести его во вращение до скорости, близкой к синхронной (  . С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
. С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
Процесс асинхронного пуска СД протекает следующим образом (рис. 4.2).
При включении обмотки статора СД в сеть СД запускается как асинхронный. При этом обмотку возбуждения замыкают на сопротивление для ограничения величины ЭДС, которая наводится в ОВ при пуске двигателя. При достижении скорости вращения близкой к номинальной, обмотку возбуждения подключают к постоянному напряжению, и двигатель втягивается в синхронизм, то есть скорость вращения двигателя становится равной синхронной скорости.
Синхронные двигатели изготавливаются на большие мощности: от сотен до тысяч киловатт. Объясняется это тем, что при меньших мощностях их применение нецелесообразно по технико-экономическим показателям.
СД обычно имеют целевое назначение, то есть каждая серия разработана для конкретных механизмов (для шаровых мельниц - СДМЗ, для привода компрессоров – СДК, для привода насосов – ВДС и др.).
Синхронные двигатели имеют перегрузочную способность  .
.
Еще одной особенностью СД является возможность работать с величиной  , более того, при перевозбуждении синхронный двигатель начинает генерировать емкостную нагрузку. Для повышении
, более того, при перевозбуждении синхронный двигатель начинает генерировать емкостную нагрузку. Для повышении  в сети используют синхронные компенсаторы, представляющие собой перевозбужденные СД специальной конструкции, работающие без нагрузки на валу.
в сети используют синхронные компенсаторы, представляющие собой перевозбужденные СД специальной конструкции, работающие без нагрузки на валу.
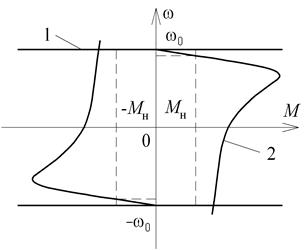
Механические характеристики синхронного двигателя представлены на рис. 4.3 (прямая 1).
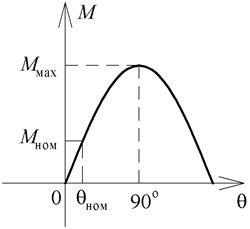
Для синхронных двигателей важное значение имеет угловая характеристика, то есть зависимость момента синхронной машины от угла  . Угол - это угол между напряжением на статоре и ЭДС двигателя. При значениях, больших 90 градусов, как видно из рис. 4.4, двигатель выпадает из синхронизма, так как участок угловой характеристики при
. Угол - это угол между напряжением на статоре и ЭДС двигателя. При значениях, больших 90 градусов, как видно из рис. 4.4, двигатель выпадает из синхронизма, так как участок угловой характеристики при  является неустойчивым.
является неустойчивым.
| 
|
| Рис. 4.3. Механические характеристики асинхронного и синхронного двигателей | Рис. 4.4. Угловая характеристика СД |
51. Электромагнитный момент синхронного двигателя. Пуск синхронных двигателей.
Синхронные двигатели долгое время находили себе применение лишь в редких случаях вследствие тех затруднений, которые создавались при пуске их в ход.
Электромагнитный вращающий момент Мэм будет все время направлен в одну сторону только при синхронной частоте вращения ротора. Если же двигатель подключить к сети переменного тока, когда его ротор неподвижен, а в обмотке возбуждения имеется постоянный ток, то электромагнитный момент, получающийся от взаимодействия неподвижного поля полюсов и перемещающихся с синхронной частотой по окружности статора токов, будет в течение периода дважды изменять свое направление (над северным, например, полюсом ротора будут иметь место токи то одного направления, то, спустя полпериода, другого направления). Двигатель не придет во вращение, так как электромагнитный момент не сможет в течение полпериода разогнать ротор до синхронной частоты из-за его инерции.
Следовательно, для того чтобы электромагнитный вращающий момент в синхронном двигателе был направлен все время в одну сторону, необходимо до подключения синхронного двигателя к сети раскрутить его каким-нибудь посторонним двигателем до синхронной частоты вращения. После этого включение рубильника или масляного выключателя должно быть произведено в определенный момент времени, который устанавливается при помощи синхроноскопа. Способы включения здесь те же, что и для генератора.
Пуск синхронного двигателя при помощи постороннего двигателя, называемого разгонным или пусковым, обладает рядом крупных недостатков, которые и препятствовали широкому распространению синхронных двигателей.
При помощи разгонного двигателя, мощность которого обычно составляла 5  15% от номинальной мощности синхронного двигателя, последний можно было пускать только при малой нагрузке на валу. Установка к тому же получалась громоздкой и неэкономичной.
15% от номинальной мощности синхронного двигателя, последний можно было пускать только при малой нагрузке на валу. Установка к тому же получалась громоздкой и неэкономичной.
В качестве разгонного двигателя обычно использовался асинхронный двигатель с числом полюсов на два меньшим, чем число полюсов синхронного двигателя.
В настоящее время пуск в ход при помощи разгонного двигателя на практике почти не применяется; он иногда находит себе применение главным образом для мощных синхронных компенсаторов (см. § 4-8,ж).
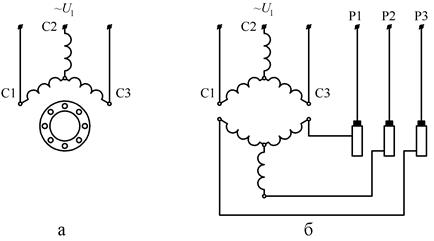
В последние годы почти во всех случаях практики применяется так называемый асинхронный пуск в ход. Синхронный двигатель при этом пускается как асинхронный. Его ротор должен быть снабжен специальной пусковой обмоткой, выполняемой так же, как продольно-поперечная успокоительная обмотка (рис. 4-46). Она мало отличается от короткозамкнутой обмотки ротора асинхронного двигателя. Стержни пусковой обмотки закладываются в пазы полюсных наконечников и соединяются на торцах пластинами, образующими короткозамыкающие кольца (рис. 4-81). Вместо пусковой клетки иногда используются массивные полюсные наконечники, которые на торцах также должны быть соединены пластинами.
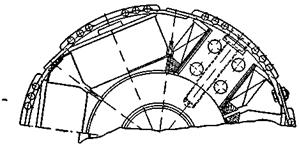
Рис. 4-81. Ротор синхронного двигателя с пусковой (успокоительной) обмоткой
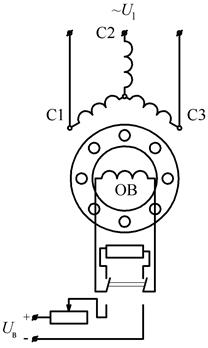
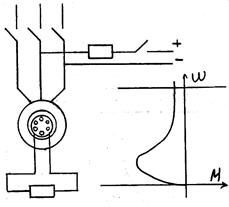
Принципиальная схема асинхронного пуска в ход синхронного двигателя приведена на рис. 4-82.

Рис. 4-82. Схема синхронного двигателя (при асинхронном пуске в ходе).
После включения двигателя в нем образуется вращающееся поле. Взаимодействие его с токами, наведенными в пусковой клетке, создает вращающий момент, так же как в короткозамкнутом асинхронном двигателе.
Обмотка возбуждения при этом должна быть замкнута, так как в противном случае в ней наводилась бы вращающимся полем большая э.д.с., опасная не только для изоляции обмотки, но и для обслуживающего персонала. Ее замыкают для увеличения пускового момента на сопротивление, приблизительно в 8 12 раз большее сопротивления самой обмотки возбуждения (переключатель на рис. 4-82 должен быть включен вверх). (При отсутствии пусковой клетки и при замкнутой накоротко обмотке возбуждения наблюдается "явление одноосного включения" (см. § 3-21,д).)
Синхронный двигатель, вращаясь как асинхронный, доходит почти до синхронной частоты. Получающееся при этом скольжение зависит от нагрузки на валу и от параметров электрических цепей ротора. Вхождение в синхронизм достигается после включения постоянного тока в обмотку возбуждения под действием возникающего при этом синхронизирующего момента (переключатель на рис. 4-82 должен быть включен вниз).
При асинхронном пуске в ход синхронных двигателей они обычно непосредственно подключаются к сети, если мощность сети достаточно велика и для нее допустимы большие пусковые токи, которые достигают в начале пуска 5¸6-кратных значений по сравнению с номинальными. Если же необходимо уменьшить пусковые токи, то пуск производится при пониженном напряжении, так же как мощных асинхронных короткозамкнутых двигателей.
Здесь также применяется пуск при переключении обмотки статора со звезды на треугольник, что дает уменьшение фазного напряжения при пуске в  раз, а линейного тока — примерно в 3 раза. Чаше для понижения напряжения при пуске используется автотрансформатор или реактор (реактивная катушка). Соответствующие принципиальные схемы пуска представлены на рис 4-83.
раз, а линейного тока — примерно в 3 раза. Чаше для понижения напряжения при пуске используется автотрансформатор или реактор (реактивная катушка). Соответствующие принципиальные схемы пуска представлены на рис 4-83.

Рис. 4-83. Схема пуска синхронного двигателя при пониженном напряжении.
а — автотрансформаторный пуск; б — реакторный пуск.
Автотрансформаторный пуск производится по схеме рис. 4-83,а, причем порядок пусковых операций следующий: замыкается выключатель В3, соединяющий обмотки автотрансформатора AT в звезду; затем замыкается выключатель В1; по достижении двигателем некоторой определенной частоты вращения выключатель В3 размыкается и автотрансформатор превращается в реактивную катушку; наконец, замыкается выключатель В2, и двигатель получает полное напряжение, после чего включается постоянный ток в обмотку возбуждения и двигатель входит в синхронизм.
Реакторный пуск производится по схеме рис. 4-83,б. Порядок пусковых операций в этом случае следующий: на первой стадии пуска замыкается выключатель В1; затем по достижении определенной частоты вращения замыкается выключатель В2 и к двигателю подается полное напряжение; после этого включается постоянный ток в обмотку возбуждения и двигатель входит в синхронизм.
Автотрансформаторный пуск является трехступенчатым пуском. На первой ступени к двигателю подводится напряжение U2, равное 40 60% номинального напряжения Uн; на второй ступени, когда автотрансформатор используется как реактор, к двигателю подводится напряжение, составляющее 70 80% номинального. Пусковые токи, получаемые из сети в начале пуска, здесь уменьшаются, как показано ниже, пропорционально квадрату напряжения.
Начальный пусковой ток в обмотке статора уменьшается пропорционально напряжению. Если при полном напряжении Uн на обмотке статора начальный пусковой ток равен Iнач, то при напряжении U2 он равен  . Ток из сети Iс — ток первичной обмотки автотрансформатора, имеющего коэффициент трансформации
. Ток из сети Iс — ток первичной обмотки автотрансформатора, имеющего коэффициент трансформации  ; следовательно,
; следовательно,  , т. е. ток сети пропорционален квадрату напряжения, так же как начальный вращающий момент, развиваемый двигателем.
, т. е. ток сети пропорционален квадрату напряжения, так же как начальный вращающий момент, развиваемый двигателем.
При реакторном пуске ток сети Iс, поступающий в двигатель в начале пуска, пропорционален напряжению, тогда как начальный вращающий момент пропорционален квадрату напряжения. В этом — недостаток реакторного пуска по сравнению с автотрансформаторным. Однако к его преимуществам нужно отнести большую простоту схемы, меньшее количество необходимой аппаратуры. Поэтому при питании двигателей от достаточно мощных подстанций, когда допустимы большие пусковые токи, следует предпочесть более простой и дешевый реакторный пуск.
52. Угловая и механическая характеристики синхронного двигателя.
Синхронный двигатель применяется для приводов механизмов, скорость которых не регулируется. Синхронный двигатель имеет достаточно высокий cosj, КПД, обладает повышенной надежностью, вследствии значительного воздушного зазора между статором и ротором двигателя. Синхронный двигатель чаще всего используется в установках с длительным режимом работы, особенно для приводов большой мощности. Двигатель применяется для привода компрессора и насосов, как двигатель-генератор, для приводов средней мощности бумажной и цементной промышленности и т.д.
В настоящее время в связи с развитием полупроводниковых технологий появился регулируемый электропривод на базе синхронного двигателя, где регулирование производится изменением частоты питающего напряжения.
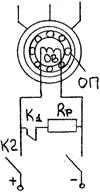
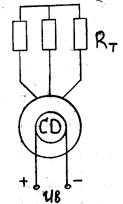
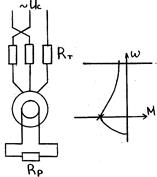
На статоре вложена трехфазная обмотка, на роторе обмотка возбуждения и пусковая обмотка. При пуске обмотку возбуждения включают на разрядное сопротивление Rр. При достижении скорости 0,95w0 подается возбуждение и включается Rр. Двигатель втягивается в синхронизм. Rр=(5¸10)Rов.
Если взять Rр достаточно большим, то в обмотке возбуждения наблюдается большие перенапряжения, если взять - малым, то искажается пусковая характеристика синхронного двигателя. Пусковая характеристика от обмотки «беличья клетка» аналогична асинхронному двигателю.
Синхронный двигатель выполнен с пусковыми клетками двух типов, что позволяет получить различные характеристики необходимые для различных механизмов.
Для второй характеристики, вследствие повышения активного сопротивления «беличьей клетки», соответствует наибольший пусковой момент. Но ей соответствует большее скольжение при номинальном моменте, что затрудняет вхождение в синхронизм. Двигатель с такой пусковой характеристикой применяется для механизмов с большим пусковым моментом.
Первая характеристика используется для механизмов при вентиляторном моменте.
Устойчивость системы синхронного двигателя характеризуется угловой характеристикой или зависимостью момента от угла внутреннего сдвига фаз между вектором ЭДС и напряжением сети.
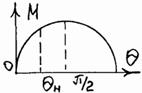
qн=(25¸30) эл. град. – номинальная L нагрузки.
Устойчивая область работы двигателя от 0 до p/2.
Векторная диаграмма:
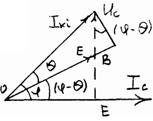
Из DОВЕ и DОАЕ: ОЕ=Uccosj=Ecos(j-q).
Из DОАС и DАВС: АС=Ucsinq=IcXccos(j-q).
 ;
;  ;
;
 ;
;  - при 900.
- при 900.
 .
.
Анализ зависимостей момента от q показывает, что асинхронный двигатель менее чувствителен к снижению напряжения, чем синхронный двигатель.
Наибольшее значение момента, характеризующего перегрузочную способность синхронного двигателя, наблюдается при угле согласования q=p/2 . При этом будет максимальный момент
 .
.
Вместе с тем важной характеристикой работы синхронного двигателя является величина угла рассогласования, который находится в пределах 300-250=qн. Этот угол характеризует двигательный режим работы двигателя по условиям нагрева.
Для повышения устойчивости работы синхронного двигателя при ударных нагрузках применяют автоматическое поддержание ЭДС двигателя за счет перевозбуждения двигателя.
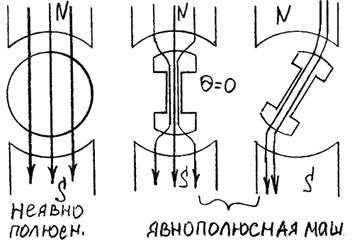
Для неявнополюсной машины момент при синхронной скорости может возникнуть только при наличии тока в обмотке возбуждения при явнополюсной машине, момент возникает и без возбуждения синхронного двигателя. Здесь возникает реактивный момент, который старается так повернуть полюса машины, чтобы сохранить минимальным магнитное сопротивление по продольной оси.
Синхронный двигатель отличается от другой машины тем, что с его помощью можно регулировать потребление реактивной энергии. Это объясняется тем, что если принять активное сопротивление статора равным нулю, то ЭДС двигателя без нагрузки будет равна напряжению сети. Она определяется результирующим магнитным полем, намагничивающих сил статора и намагничивающих сил обмотки возбуждения, и, в этом случае когда ток возбуждения отсутствует, весь поток создается статором, синхронный двигатель потребляет реактивный ток и тот отстает от напряжения сети на 900. Если машину возбудить, то часть результирующих намагничивающих сил будет создана обмоткой возбуждения и тогда намагничивающий ток статора, а следовательно и потребляемая энергия из сети уменьшится. Дальнейшее увеличение возбуждения двигателя приведет к размагничиванию магнитной системы двигателя.
Перевозбуждение машины заставляет работать двигатель в емкостном квадранте, работать генератором реактивной энергии. Синхронный двигатель характеризуется U-образными характеристиками, это зависимость полного тока статора от тока возбуждения при различных нагрузках.
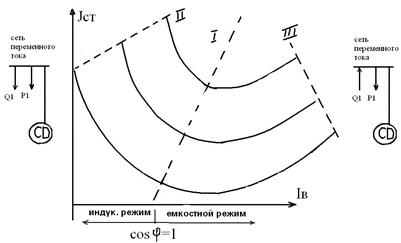

Кривая II – характеризует границу устойчивости статической работы двигателя.
Кривая I – регулировочная характеристика двигателя при cosj=1.
Кривая III – соответствует верхней границе возбуждения двигателя по условиям нагрева двигателя и самораскачивания.
Синхронный двигатель может работать в тех же тормозных режимах, что и асинхронный и другие двигатели, т.е. режим с рекуперацией энергии в сеть, режим динамического торможения и режим противовключения.
1)  2)
2) 
Торможение противовключением. В этом случае происходит изменение чередования фаз, обмотка возбуждения закорачивается на разрядное сопротивление.
Дата: 2019-02-02, просмотров: 1000.