В режиме холостого хода генератора постоянного тока ток возбуждения создает основной поток, который при вращении якоря наводит в обмотке якоря ЭДС. Поток при холостом ходе имеет симметричный характер, рис. 18. Если якорную цепь подключить к нагрузке, то по обмотке якоря будет протекать ток, который создаст свой поток.
Взаимодействие потока якоря с потоком основных полюсов и называется реакцией якоря. Картину распределения потока якоря можно представить на рис. 19.
При холостом ходе генератора ЭДС наводимая в обмотке якоря определяется по правилу правой руки. Подключив нагрузку, в якоре появится ток с тем же направлением что и ЭДС. Ток создаст поток, который взаимодействуя с потоком основных полюсов, создаст результирующий поток. За счет потока якоря набегающий край полюса будет размагничиваться, а сбегающий край полюса намагничиваться, рис. 20. Физическая нейтраль у генератора будет сдвигаться по ходу вращения якоря. Она перпендикулярна результирующему потоку.
 Реакция якоря у двигателя противоположна генератору.
Реакция якоря у двигателя противоположна генератору.
Генератор Двигатель
При одинаковом направлении вращения якоря, независимо от режима работы, направление ЭДС в якоре одинаково. В двигательном режиме ток якоря направлен встречно ЭДС, поэтому реакция якоря двигателя противоположна генератору, т.е. набегающий край полюса будет намагничиваться, а сбегающий край полюса размагничиваться.
Рассмотрим намагничивающую силу реакции якоря, магнитную индукцию якоря и результирующую индукцию на полюсном делении.
Для рассмотрения намагничивающей силы реакции якоря введем понятие о линейной нагрузке якоря – ток приходящийся на единицу длины окружности якоря.
Путем введения этой величины можно условно заменить зубчатый якорь гладким, у которого линейная нагрузка равномерно распределена по всей поверхности. У реального якоря ток находится только в пазах, что осложняет расчет.
По закону полного тока следует, что намагничивающая сила по замкнутому контуру равна полному току, который охватывается этим контуром, а полный ток на данной длине определяется линейной нагрузкой.
Поэтому намагничивающая сила реакции якоря  - линейный закон. При
- линейный закон. При  ,
,  ;
;  ,
,  .
.
Определим закономерность индукции якоря.  - линейный закон сохраняется под полюсами, а между полюсами за счет большого сопротивления воздуха кривая индукции имеет провал. (
- линейный закон сохраняется под полюсами, а между полюсами за счет большого сопротивления воздуха кривая индукции имеет провал. (  ), рис. 21. При холостом ходе индукция
), рис. 21. При холостом ходе индукция
рис.21  имеет вид близкий к трапеции.
имеет вид близкий к трапеции.
Результирующая кривая индукции  имеет искаженный характер, т. е. набегающий край полюса размагничивается, а сбегающий намагничивается. Щетки установлены на нейтрали. Реакция якоря при этом будет поперечная, рис. 22.
имеет искаженный характер, т. е. набегающий край полюса размагничивается, а сбегающий намагничивается. Щетки установлены на нейтрали. Реакция якоря при этом будет поперечная, рис. 22.
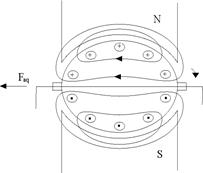

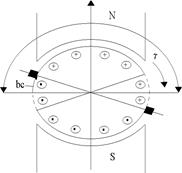
рис.22 рис.23 рис.24
Если щетки установить вдоль полюсов, реакция якоря будет продольно размагничивающая, рис. 23. Если щетки генератора сдвинуть на дугу (  ) по направлению вращения то реакцию якоря можно разложить по осям, рис. 24.
) по направлению вращения то реакцию якоря можно разложить по осям, рис. 24.
 ,
,  ,
,
где:  - поперечная ось
- поперечная ось
 - продольная ось.
- продольная ось.
Поперечная намагничивающая сила искажает магнитный поток, а продольная размагничивает.
Реакция якоря влияет на все характеристики генераторов постоянного тока.
3.5. Генераторы постоянного тока
Генератор постоянного тока преобразует механическую энергию в электрическую. В зависимости от способов соединения обмоток возбуждения с якорем генераторы классифицируются:
1. генератор независимого возбуждения, рис. 25
2. генераторы с самовозбуждением:
а) генератор параллельного возбуждения, рис. 26
б) генератор последовательного возбуждения, рис. 27

| 
| 
|
в) генератор смешанного возбуждения, рис. 28

|
Энергетическая диаграмма генератора независимого возбуждения. 
 - механическая мощность на валу
- механическая мощность на валу
 - электромагнитная мощность
- электромагнитная мощность
 - отдаваемая электрическая мощность
- отдаваемая электрическая мощность
 - потери магнитные, механические, электрические, потери в щеточном контакте.
- потери магнитные, механические, электрические, потери в щеточном контакте.

 Разделив уравнение на ток якоря
Разделив уравнение на ток якоря  , получим:
, получим:
 или
или 
42. Механические характеристики ДПТ независимого возбуждения.
Электрический двигатель, в отличие от двигателей других типов, способен сам автоматически разгоняться до скорости установившегося режима работы, снижать скорость при увеличении момента сопротивления и из установившегося режима с большей скоростью переходить в установившийся режим с меньшей скоростью, увеличивать скорость при уменьшении момента сопротивления и переходить из установившегося режима с меньшей скоростью к установившемуся режиму с большей скоростью. Эта особенность электрического двигателя объясняется тем, что между скоростью вращения и вращающим моментом двигателя существует зависимость ω=f(М), в соответствии с которой с увеличением момента скорость уменьшается и наоборот. Называют эту зависимость механической характеристикой двигателя.
С помощью механической характеристики можно определить основные свойства электрического двигателя и проверить их соответствие требованиям технологической машины.
Оси абсцисс и ординат, по которым откладываются соответственно величины М и ω, разделяют плоскость на четыре квадрата. Первый номер принято присваивать верхнему правому квадрату, а остальные нумеровать против часовой стрелки.
В первом квадранте знаки М и ω, а значит и направление величин, совпадает. Поэтому в нём располагаются механические характеристики для двигательного режима работы электрической машины. Аналогичные характеристики для противоположного направления вращения располагаются и в третьем квадранте, так как знаки М и ω отрицательны.
Во втором квадранте скорость ω положительна, а момент М имеет отрицательный знак. Поэтому в нём располагаются механические характеристики, соответствующие режиму электрического торможения, когда под действием инерционных сил направление вращения сохраняется, а направление момента за счёт изменения схемы включения двигателя изменяется на противоположное. Аналогичные характеристики для противоположного направления вращения располагаются и в четвёртом квадранте, так как в нём ω имеет отрицательный знак, а М – положительный.
Схема включения двигателя постоянного тока (ДПТ) с независимым возбуждением приведена на рис. 2.1.
Якорь двигателя и обмотка возбуждения LM получает питание от независимых источников напряжения U и Uв. Поэтому ток в обмотке возбуждения Ів не зависит от тока якоря Ія. Мощность источника Uв не превышает 15% от мощности источника U.
При вращающемся якоре в его обмотке наводится э.д.с. вращения Е. На схеме включения двигателя направление Е встречно по отношению к направлению U, что соответствует двигательному режиму работы. Величина Е равна:
 ,
,
где ω – угловая скорость двигателя;
|
Рис. 2.1 – Схема включения двигателя постоянного тока с независимым возбуждением
Ф –поток двигателя;
 – конструктивный коэффициент двигателя, данные, для расчёта которого приводятся в справочниках.
– конструктивный коэффициент двигателя, данные, для расчёта которого приводятся в справочниках.
Здесь р – число пар полюсов двигателя; N – число активных проводников обмотки якоря; а – число пар параллельных ветвей обмотки якоря.
Направление якорного тока Iя, как и направление Е, на схеме включения показано для двигательного режима работы.
Допустимое значение якорного тока двигателя Iя.доп. ограничивается условиями коммутации и механической прочностью якоря и не должно превышать номинальный ток Iя.н. более чем в 2,5 раза - Iя.доп. ≤ 2,5∙ Iя.н..
В соответствии с уравнением равновесия напряжений при установившемся режиме работы двигателя напряжение U, приложенное к якорной цепи двигателя, уравновешивается падением напряжения в якорной цепи IЯRЯЦ и наведённой в обмотке якоря э.д.с. вращения Е:
 ,
,
где  – суммарное сопротивление якорной цепи.
– суммарное сопротивление якорной цепи.
Здесь RЯ – сопротивление обмотки якоря; RДП – сопротивление обмотки дополнительных полюсов; RКО – сопротивление компенсационной обмотки; RП – сопротивление пускового реостата.
Величина IЯ в установившемся режиме будет равна:
 .
.
В режиме пуска Е=0, поэтому из–за небольшого сопротивления обмоток пусковой ток Iяп может превышать допустимое значение. Для ограничения пускового тока служит пусковой реостат, сопротивление которого Rп выбирается таким образом, чтобы IЯП ≤ Iя.доп..
 .
.
В цепи питания LM включён реостат с сопротивлением RВ. С его помощью уменьшается ток в обмотке возбуждения. В результате поток двигателя Фослабляется, становясь меньше номинального значения Ф≤Фн.
Из уравнения равновесия напряжений для якорной цепи можно получить аналитическое выражение для механической характеристики двигателя.
Подставив в него вместо э.д.с. вращения Е, её значение и решив полученное уравнение относительно скорости, получим зависимость скорости двигателя ω от тока якоря IЯ ω=f(IЯ), которая называется электромеханической характеристикой:
 .
.
Вращающий момент двигателя М связан с током якоря и магнитным потоком зависимостью М=кФIЯ. Подставив в уравнение электромеханической характеристики значения для тока IЯ=М/кФ, получим выражение для механической характеристики ω=f(М):
 или
или  ,
,
где с=кФ – коэффициент, принимаемый постоянным и не зависящим от тока якоря, если у двигателя имеется компенсационная обмотка или если реакцию якоря не учитывать.
При неизменных параметрах U, Ф, RЯЦ уравнение механической характеристики есть уравнение прямой линии.
В режиме идеального холостого хода Мс=0 и М=0, поскольку в установившемся режиме двигатель работает с М=Мс. Тогда
 ,где ω0 –скорость идеального холостого хода.
,где ω0 –скорость идеального холостого хода.
При увеличении момента сопротивления скорость установившегося режима уменьшается на величину статического падения скорости Δωс, которое равно:
 .
.
Таким образом, уравнение для механической характеристики двигателя можно записать в следующем виде:
 .
.
Механическая характеристика двигателя, которая получается при отсутствии внешних сопротивлений в якорной цепи (RП=0) и номинальных значениях потока двигателя (Ф=Фн) и напряжения на якоре (U=Uн) называется естественной характеристикой. Следует отметить, что выполнение двух первых условий не вызывает трудностей. Третье условие (U=Uн) выполняется в том случае, если якорная цепь двигателя питается от источника бесконечной мощности или в замкнутой системе преобразователь-двигатель с обратной связью по напряжению преобразователя и астатическим регулятором напряжения.
Построить естественную характеристику, учитывая её линейность, можно по двум точкам – точке идеального холостого хода с координатами (М=0; ω=ω0) и точке, соответствующей номинальному режиму работы (М=Мн; ω=ωн). На основании паспортных данных двигателя (Рн, Uн, Ін, nн) можно найти:
 .
.
Естественная характеристика приведена на рис. 2.2.
Рис. 2.2 - Механические характеристики двигателя постоянного тока независимого возбуждения.
При скорости двигателя ток ω=ω0 ІЯ=0, так как э.д.с. вращения Е=U и направлена по отношению к нему встречно. Работать в двигательном режиме со скоростью ω=ω0 двигатель не может, так как даже при отсутствии нагрузки со стороны технологической машины трение в подшипниках и крыльчатка вентилятора создают момент сопротивления холостого хода Мсхх. Двигатель в установившемся режиме будет работать с М= Мсхх и ω=ωхх<ω0. При этом Е<U, а Ія>0.
Найти величину ωхх можно, изобразив в одном квадрате с механической характеристикой двигателя механическую характеристику технологической машины. Если предположить, что Мс не зависит от скорости, то через точку с координатами (ω=0; М=Мсхх) необходимо провести вертикальную прямую до её пересечения с механической характеристикой двигателя (точка А). В точке А М=Мс, а её проекция на ось ординат равна ωхх.
При увеличении момента сопротивления от Мсхх до Мс=Мн появится отрицательный динамический момент МД<0 и скорость двигателя начнёт уменьшаться. Следствием этого будет уменьшение э.д.с. вращения Е=кωФ , увеличение якорного тока ІЯ=(U–Е)/RЯЦ и вращающего момента М=кIЯФ. Снижение скорости и увеличение момента двигателя будет продолжаться до тех пор, пока МД не станет равным нулю, т.е. момент двигателя МД не станет равным Мс=Мн..
Благодаря тому, что в обмотке якоря наводится э.д.с. вращения Е, двигатель при увеличении Мс автоматически, снизив скорость вращения и увеличив вращающий момент, перешёл из установившегося режима с большей скоростью (ωх.х.в точке А) в установившийся режим с меньшей скоростью (ωн в точке В).
Статически падение скорости на естественной характеристике равно:
 .
.
Если сопротивление пускового реостата RП>0, то Δωс при одном и том же моменте двигателя будет больше, чем на естественной характеристике:
 .
.
Поскольку величина ω0 не зависит от величины RП, то получаемая в этом случае характеристика, которая называется искусственной или реостатной, будет начинаться в той же точке, что и естественная, но проходить с большим наклоном к оси абсцисс.
Якорный ток Iя и момент двигателя М связаны прямой пропорциональной зависимостью. Поэтому ограничение с помощью Rп пускового тока значением Iя.доп.≤2,5 Iян автоматически ограничивает и допустимое значение пускового момента Мдоп≤2,5Мн. Механическая характеристика на рис. 2.2 в этом случае пересекает ось абсцисс в точке с координатами (ω=0; М=Мдоп=2,5Мн) и называется предельной пусковой. Реостатные характеристики, расположенные выше получаются при меньших величинах RП. Запускаясь при Мс=Мн по предельной пусковой характеристике, двигатель разгонится до скорости ω1 и перейдёт в установившийся режим работы. Для увеличения скорости двигателя необходимо уменьшить величину RП.
43. Устройство, принцип действия и применение машин постоянного тока.
У машины постоянного тока нормального исполнения цилиндрический ротор с расположенной на нем обмоткой, называемый якорем, вращается в неподвижном магнитном поле (рис. 8.11). В витках 1-3 и 2—4 обмотки якоря индуктируются переменные ЭДС, для получения неизменного направления тока i в сопротивлении нагрузки r применяется коллектор К, состоящий из медных изолированных друг от друга пластин, образующих цилиндр, по которому скользят щетки a − b. Наличие коллектора является отличительной особенностью машины постоянного тока. К его пластинам присоединяются начала и концы витков обмотки. Стороны витков, расположенные за плоскостью рисунка, условно показаны штриховыми линиями. Обмотку якоря выполняют из медной изолированной проволоки, в машинах большой мощности– из медных стержней. Обычно обмотка якоря состоит из отдельных якорных катушек, которые обматывают изоляционными лентами из миканита, асбеста, стеклоткани и др. и укладывают в пазы якоря. В каждом пазу укладывают обычно две стороны различных якорных катушек, одна поверх другой. Каждая якорная катушка включает в себя несколько секций, концы которых припаивают к соответствующим коллекторным пластинам.
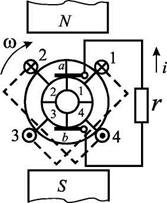
В положении, показанном на рис. 8.11, а, между щетками будет максимальная ЭДС, так как стороны 1-3 витка пересекают магнитные линии перпендикулярно. При дальнейшем вращении эта ЭДС начнет убывать. После поворота якоря на 45° (рис.8.11,б) щетки перейдут с пластин 1-3 коллектора на пластины 2—4 и подключатся к следующему витку. ЭДС в нем будет сначала возрастать до максимума, а затем начнет уменьшаться, пока щетки снова не перейдут на пластины 3-1; ЭДС снова начнет возрастать и т.д. Рост и уменьшение ЭДС происходят за время, соответствующее повороту якоря на угол π (Рис. 8.12), на протяжении этого времени каждая щетка касается одной и той же коллекторной пластины.
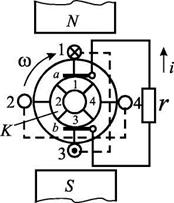
. Рис. 8.11 Простейший генератор с двумя витками и четырьмя коллекторными пластинами
Пульсации ЭДС (и тока) вредно сказываются на работе приемников и самого генератора. Для их уменьшения увеличивают число витков, в которых индуктируются ЭДС, и число коллекторных пластин.
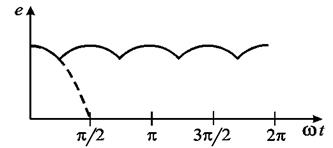
Рис. 8.12. ЭДС генератора с четырьмя коллекторными пластинами
В соответствии с принципом обратимости машина постоянного тока может работать как генератор и как двигатель. В любом случае проводники пересекают линии поля и в них возникает ЭДС. Одновременно на проводники с током в магнитном поле воздействуют электромагнитные силы.
Генератор преобразует механическую энергию, которая подводится к валу первичным двигателем, в электрическую, потребляемую приемником, включенным на его зажимы. Механическое усилие первичного двигателя (рис. 8.13,а) приводит проводники якоря в движение с некоторой скоростью υ. Возникающая ЭДС E вызывает ток I такого же направления и должна преодолеть падение напряжения в обмотке якоря и сопротивление нагрузки:
где U - напряжение на зажимах генератора или приемника; rя - сопротивления цепи якоря.
Электромагнитная сила Fэм действующая на проводники с током, оказывает противодействие усилию F первичного двигателя. В установившемся режиме при постоянной скорости эти силы равны:

В двигателе протекание тока в обмотке якоря обусловлено приложенным напряжением U, направление которого совпадает с направлением тока (рис. 8.13,б).
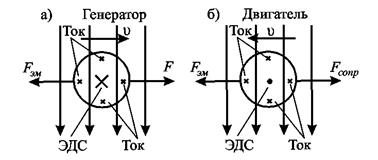
Рис. 8.13. ЭДС, токи и механические силы в проводнике обмотки якоря генератора и двигателя постоянного тока
На проводники с током действует электромагнитная сила Fэм приводящая в движение якорь со скоростью υ. При том же направлении тока, что и в генераторе, направление движения будет противоположным. Возникающая в проводниках при пересечении линий поля ЭДС оказывается противоположной току, а, следовательно, и напряжению U, которое должно преодолеть эту ЭДС и падение напряжения в обмотке якоря:
U = E + I rя
При постоянной скорости электромагнитная сила должна преодолевать силу сопротивления Fсопр на валу двигателя.
44. Пуск электродвигателя постоянного тока (пояснить механическими характеристиками).
Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений. Пусковой реостат выполняется из провода или ленты с высоким удельным сопротивлением, разделенных на секции. Провода присоединяются к медным кнопочным или плоским контактам в местах перехода от одной секции к другой. По контактам перемещается медная щетка поворотного рычага реостата. Реостаты могут иметь и другое выполнение. Ток возбуждения при пуске двигателя с параллельным возбуждением устанавливается соответствующим нормальной работе, цепь возбуждения включается прямо на напряжение сети, чтобы не было уменьшения напряжения, обусловленного падением напряжения в реостате (см. рис. 1). Необходимость иметь нормальный ток возбуждения связана с тем, что при пуске двигатель должен развивать возможно больший допустимый момент Мэм, необходимый для обеспечения быстрого разгона. Пуск двигателя постоянного токапроизводится при последовательном уменьшении сопротивления реостата, обычно — путем перевода рычага реостата с одного неподвижного контакта реостата на другой и выключения секций; уменьшение сопротивления может производиться и путем замыкания накоротко секций контакторами, срабатывающими по заданной программе. При пуске вручную или автоматически ток изменяется от максимального значения, равного 1,8 —2,5-кратному номинальному в начале работы при данном сопротивлении реостата, до минимального значения, равного 1,1 — 1,5-кратному номинальному в конце работы и перед переключением на другое положение пускового реостата. Ток якоря после включения двигателя при сопротивлении реостата rп составляет  где Uс — напряжение сети. После включения начинается разгон двигателя, при этом возникает противо-ЭДС Е и уменьшается ток якоря. Если учесть, что механические характеристики n = f1(Mн) и n = f2 (Iя) практически линейны, то при разгоне увеличение скорости вращения будет происходить по линейному закону в зависимости от тока якоря (рис. 1).
где Uс — напряжение сети. После включения начинается разгон двигателя, при этом возникает противо-ЭДС Е и уменьшается ток якоря. Если учесть, что механические характеристики n = f1(Mн) и n = f2 (Iя) практически линейны, то при разгоне увеличение скорости вращения будет происходить по линейному закону в зависимости от тока якоря (рис. 1).
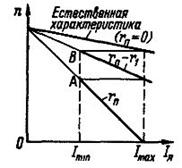
Рис. 1. Диаграмма пуска двигателя постоянного тока.
Пусковая диаграмма (рис. 1) для различных сопротивлений в цепи якоря представляет собой отрезки линейных механических характеристик. При уменьшении тока якоря IЯ до значения Imin выключается секция реостата с сопротивлением r1 и ток возрастает до значения  где E1 — ЭДС в точке А характеристики; r1—сопротивление выключаемой секции. Затем снова происходит разгон двигателя до точки В, и так далее вплоть до выхода на естественную характеристику, когда двигатель будет включен прямо на напряжение Uc. Пусковые реостаты рассчитаны по нагреву на 4 —6 пусков подряд, поэтому нужно следить, чтобы в конце пуска пусковой реостат был полностью выведен. При остановке двигатель отключается от источника энергии, а пусковой реостат полностью включается — двигатель готов к следующему пуску. Для устранения возможности появления больших ЭДС самоиндукции при разрыве цепи возбуждения и при ее отключении цепь может замыкаться на разрядное сопротивление. В регулируемых приводах пуск двигателей постоянного тока производится путем постепенного повышения напряжения источника питания так, чтобы ток при пуске поддерживался в требуемых пределах или сохранялся в течение большей части времени пуска примерно неизменным. Последнее можно осуществить путем автоматического управления процессом изменения напряжения источника питания в системах с обратными связями. Пуск двигателей постоянного тока с последовательным возбуждением производится также при помощи пусковых устройств. Пусковая диаграмма представляет собой отрезки нелинейной механической характеристики для различных сопротивлений цепи якоря. Пуск при относительно небольших мощностях может выполняться вручную, а при больших — путем замыкания накоротко секций пускового реостата контакторами, которые срабатывают при управлении вручную или автоматически.
где E1 — ЭДС в точке А характеристики; r1—сопротивление выключаемой секции. Затем снова происходит разгон двигателя до точки В, и так далее вплоть до выхода на естественную характеристику, когда двигатель будет включен прямо на напряжение Uc. Пусковые реостаты рассчитаны по нагреву на 4 —6 пусков подряд, поэтому нужно следить, чтобы в конце пуска пусковой реостат был полностью выведен. При остановке двигатель отключается от источника энергии, а пусковой реостат полностью включается — двигатель готов к следующему пуску. Для устранения возможности появления больших ЭДС самоиндукции при разрыве цепи возбуждения и при ее отключении цепь может замыкаться на разрядное сопротивление. В регулируемых приводах пуск двигателей постоянного тока производится путем постепенного повышения напряжения источника питания так, чтобы ток при пуске поддерживался в требуемых пределах или сохранялся в течение большей части времени пуска примерно неизменным. Последнее можно осуществить путем автоматического управления процессом изменения напряжения источника питания в системах с обратными связями. Пуск двигателей постоянного тока с последовательным возбуждением производится также при помощи пусковых устройств. Пусковая диаграмма представляет собой отрезки нелинейной механической характеристики для различных сопротивлений цепи якоря. Пуск при относительно небольших мощностях может выполняться вручную, а при больших — путем замыкания накоротко секций пускового реостата контакторами, которые срабатывают при управлении вручную или автоматически.
Дата: 2019-02-02, просмотров: 1007.