Группы соединения трехфазных трансформаторов
Группой соединения трансформатора называется угол сдвига между линейными ЭДС первичной и вторичной обмоток трансформатора. За первичную обмотку принимают обмотку высокого напряжения.
Группа соединения зависит от:
от направления намотки;
маркировки концов обмотки;
схемы соединения обмоток.
Группы соединения трехфазных трансформаторов:
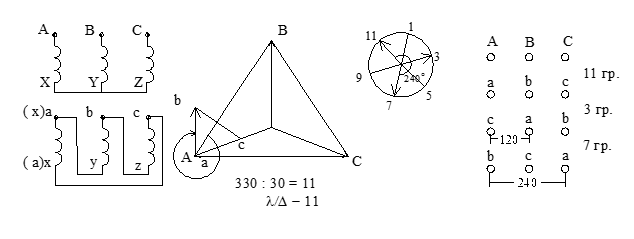 1) соединение
1) соединение  /D, рис 30. Рис. 30
/D, рис 30. Рис. 30
2) соединение / , рис. 31.
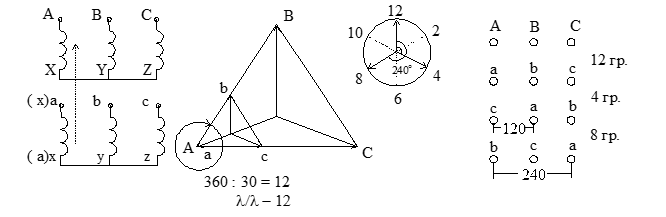 Рис. 31
Рис. 31
Группы соединения необходимо знать для включения трансформаторов на параллельную работу.
9. Трансформаторы измерительные: устройство, назначение, типы.
Прямой пуск
При прямом пуске двигатель включается непосредственно в сеть ( рис. 5.1 ), для
чего вручную ( при ручном управлении ) или при помощи аппаратуры ( при автоматизиро-ванном пуске ) замыкают контакты К1 и К2..

Рис. 5.1. Прямой пуск двигателя: а – схема пуска; б – пусковая диаграмма
Ток якоря двигателя определяется из ф-лы равновесия ЭДС (см.ранее)
I  =
= 
При прямом пуске пусковой ток ЭД постоянного тока равен
І п = (10 – 20 ) І н
Такой пусковой ток для двигателя недопустим по 2-м причинам :
1. на коллекторе может возникнуть круговой огонь и получается режим КЗ двигателя, а следовательно выход двигателя из строя;
2. возникает ударный пусковой момент и механические повреждения .
Причины такого большого пускового тока :
1. малое сопротивление обмотки якоря;
2. отсутствие противоЭДС при пуске .
По Правилам Регистра, прямой пуск электродвигателей допускается при условии, что номинальная мощность двигателя не превышает 0,5 кВт,т.е. Р  ≤ 0,5 кВт.
≤ 0,5 кВт.
Объясним эти причины более детально.
Как известно из СЭМ, обмотка якоря ЭД постоянного тока имеет очень малое активное сопротивление (от 3 до 10 % от Rн) .
Пусть электродвигатель имеет такие данные: напряжение U = 220 В, номинальная противоЭДС обмотки якоря Е  = 210 В, сопротивление обмотки якоря двигателя R
= 210 В, сопротивление обмотки якоря двигателя R  = 1 Ом.
= 1 Ом.
Тогда номинальный ток якоря
I = =  = 10 А.
= 10 А.
При пуске скорость якоря ω = 0, поэтому противоЭДС обмотки якоря
Е = к* ω* Ф = к* 0* Ф = 0
( к – конструктивный коэффициент, величина постоянная, ω – угловая скорость якоря, Ф – магнитный поток, созданный параллельной обмоткой возбуждения L ).
Тогда пусковой ток якоря
I  = =
= =  =
=  = 220 А.
= 220 А.
Таким образом, пусковой ток якоря I = 220 А превышает номинальный I = 10 А в 22 раза, что недопустимо.
После пуска двигатель начнет разгоняться, в обмотке якоря появится и станет увеличиваться противоЭДС обмотки якоря ↑Е = к↑ωФ, а ток якоря – уменьшаться.
Процесс пуска прекратится в точке «В», в которой скорость якоря и ток якоря имеют номинальные значения: ω = ω , I = I .
Допускаемые по условиям коммутации значения пусковых токов не должны превышать номинальный более чем в 2,5 раза, т.е. не должно нарушаться соотношение
I ≤ 2,5 I
Выясним, как можно уменьшить пусковые токи.
Как следует из формулы пускового тока якоря
I = ,
его можно уменьшить двумя способами:
1. увеличить знаменатель, т.е. увеличить при пуске сопротивления цепи обмотки якоря ( реостатный пуск );
2. уменьшить числитель, т.е. уменьшить при пуске напряжение на обмотке якоря.
Рассмотрим поочередно эти два способа.
Реостатный пуск
Схема реостатного пуска изображена на рис. 5.3.
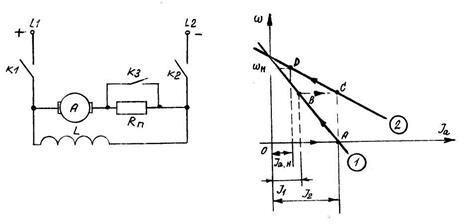
Рис. 5.3. Реостатный пуск двигателя: а – схема пуска; б – пусковая диаграмма
При пуске замыкаются контакты К1 и К2, контакт К3 разомкнут. Через контакты К1 и К2 на обмотку якоря «А» и параллельную обмотку возбуждения «L» подается питание сети, а через разомкнутый контакт КМ3 в цепь обмотки якоря вводится пусковой резистор R  , поэтому полное сопротивление обмотки якоря увеличивается до значения ( R + R ).
, поэтому полное сопротивление обмотки якоря увеличивается до значения ( R + R ).
Двигатель развивает пусковой ток
I = I  =
=  ≤ 2,5 I
≤ 2,5 I
На электромеханической характеристике ω( I ) двигатель переходит из точки «0» в точку «А», после чего начинает разгоняться по участку «АВ» характеристики.
В точке «В», при токе I  ( обычно I = 1,1…1,2 I ) контакт К3 замыкается, вследствие чего двигатель с броском тока переходит из точки «В» в точку «С» и далее продолжает разгоняться до точки «D», в которой наступит установившийся номинальный режим.
( обычно I = 1,1…1,2 I ) контакт К3 замыкается, вследствие чего двигатель с броском тока переходит из точки «В» в точку «С» и далее продолжает разгоняться до точки «D», в которой наступит установившийся номинальный режим.
На практике для ручного пуска применяют пусковые реостаты ( отсюда название этого способа – реостатный ), имеющие несколько ступеней.
Перед пуском маховичок реостата должен быть повернут влево до упора, при пуске его поворачивают по часовой стрелке, постепенно выводя ступени пускового резистора из цепи обмотки якоря двигателя ). Сам процесс пуска не должен превышать 6…8 с.
Нельзя оставлять маховичок реостата в промежуточном положении, при котором в цепи обмотки якоря останутся ступени пускового реостата, т.к. они сгорят.
Эти ступени рассчитаны лишь на кратковременное протекание через них пускового тока.
Второй способ рассмотрим при изучении схем Г-Д (генератор – двигатель).
36. Элементы конструкции и принцип действия машин постоянного тока.
Принцип действия электродвигателя:
Основан на взаимодействии магнитного поля и проводника с током.
 Если проводник с током поместить в магнитное поле на него начнет действовать выталкивающая сила.
Если проводник с током поместить в магнитное поле на него начнет действовать выталкивающая сила.
Вокруг проводника с током образуется собственное магнитное поле, имеющее концентрических окружностей. Направление силовых линий этого поля определяется по правилу буравчика.
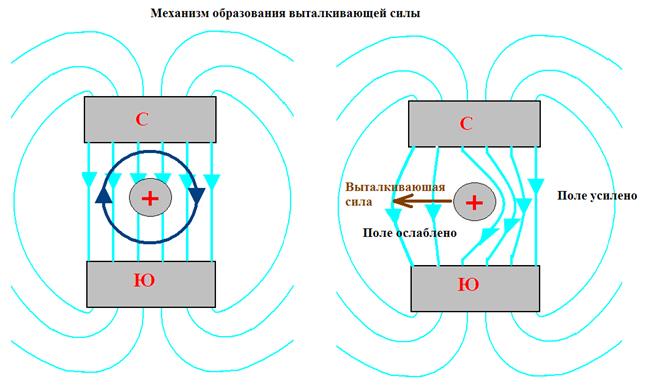
Когда проводник с током находится в магнитном поле, его магнитное поле накладывается на внешнее поле усиливая его с той стороны, где направление силовых линий обоих полей совпадает и ослабляя с противоположной стороны, где силовые линии полей направлены в противоположные стороны.
В результате и образуется выталкивающая сила. Более сильное поле выталкивает проводник в сторону более слабого поля.
Направление выталкивающей силы определяется по правилу левой руки.
«Если расположить левую руку так, чтобы силовые линии входили в ладонь, вытянутые 4 пальца показывали направление движения тока в проводнике, тогда отогнутый большой палец укажет направление действия выталкивающей силы».
А ее величина определяется по формуле;  I, где:
I, где:
В – величина магнитной индукции (плотность магнитного потока);
l – активная длинна проводника
I – скорость движения проводника;
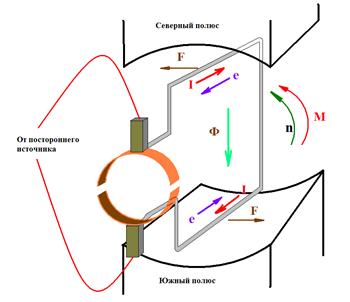
Простейший электродвигатель
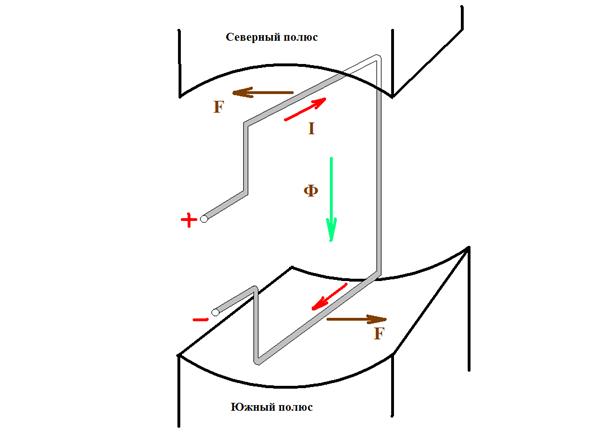 Представляет из себя проводник выполненный в форме рамки, помещенный в магнитное поле между двух полюсов, при прохождении тока по проводнику на его активные стороны начинают действовать пара выталкивающих сил F создающая вращательный момент, заставляющий рамку поворачиваться.
Представляет из себя проводник выполненный в форме рамки, помещенный в магнитное поле между двух полюсов, при прохождении тока по проводнику на его активные стороны начинают действовать пара выталкивающих сил F создающая вращательный момент, заставляющий рамку поворачиваться.
В реальности такой двигатель работать не сможет. Рассмотрим 3 положения рамки.
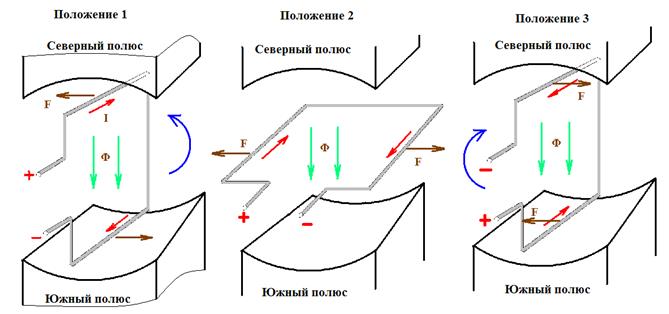
| Вращение против часовой стрелки | Вращения нет, рамка растягивается | Вращение по часовой стрелке |
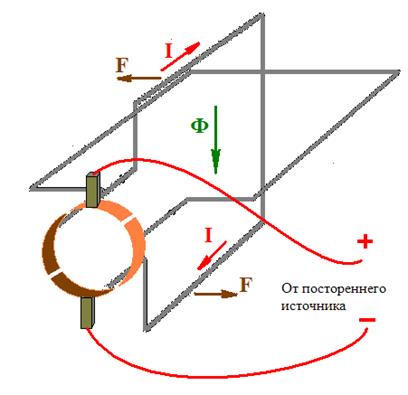 Реальный двигатель должен иметь не одну, а несколько рамок и снабжен специальным устройством – коллектором, обеспечивающим поочередное соединение рамок с внешней цепью при помощи скользящих щеток и осуществляющем переключение рамок таким образом, чтобы во всех проводниках рамок находящимся под одним полюсом было одно направление тока, а во всех проводниках рамок под другим полюсом также одно, но противоположное направление тока
Реальный двигатель должен иметь не одну, а несколько рамок и снабжен специальным устройством – коллектором, обеспечивающим поочередное соединение рамок с внешней цепью при помощи скользящих щеток и осуществляющем переключение рамок таким образом, чтобы во всех проводниках рамок находящимся под одним полюсом было одно направление тока, а во всех проводниках рамок под другим полюсом также одно, но противоположное направление тока
ПРИНЦИП ДЕЙСТВИЯ ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА
Основывается на явлении электромагнитной индукции

 Рассмотрим систему состоящую из проводника и магнитного поля.
Рассмотрим систему состоящую из проводника и магнитного поля.
При движении проводника через магнитное поле в нем создается электродвижущая сила Е, направление этой силы определяется по правилу правой руки
«Если расположить правую руку так, чтобы силовые линии входили в ладонь, отогнутый большой палец показывал направление движения проводника , тогда вытянутые 4 пальца укажут направление индуктируемой ЭДС и тока в проводнике»
Величина ЭДС определяется по формуле:
 где:
где:
В – величина магнитной индукции (плотность магнитного потока);
l – активная длинна проводника
V – скорость движения проводника;
Cos α – коэффициент учитывающий направление движения относительно направления силовых линий поля.
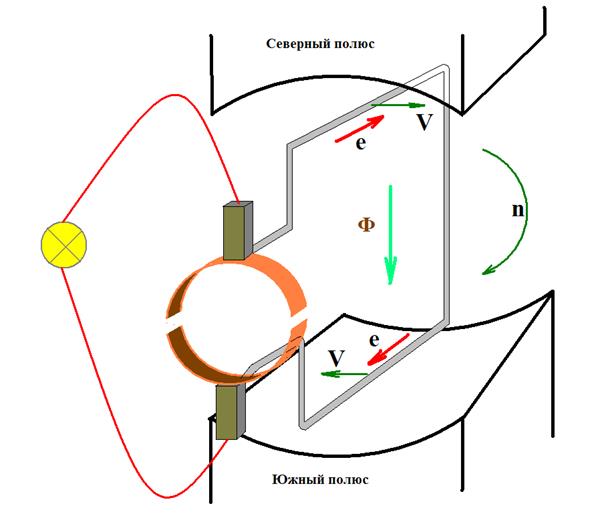 Простейший генератор можно представить в виде рамки вращающейся в магнитном поле
Простейший генератор можно представить в виде рамки вращающейся в магнитном поле
При вращении рамки ее проводники пересекают силовые линии поля и в них индуктируется ЭДС, причем направление ЭДС обоих активных сторон суммируются. Но величина индуктируемых ЭДС постоянно меняется в зависимости от угла поворота рамки и даже меняет направление когда активные стороны рамки меняются местами.
Таким образом при вращении рамки в ней создается переменная ЭДС. И один полный оборот рамки соответствует полному периоду изменяющейся ЭДС.
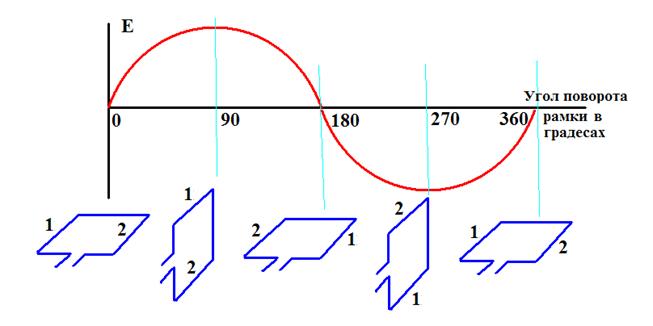
 Чтобы превратить переменный ток в постоянный используется такой же коллектор, как и у двигателя при этом получается выпрямленный, но пульсирующий ток.
Чтобы превратить переменный ток в постоянный используется такой же коллектор, как и у двигателя при этом получается выпрямленный, но пульсирующий ток.
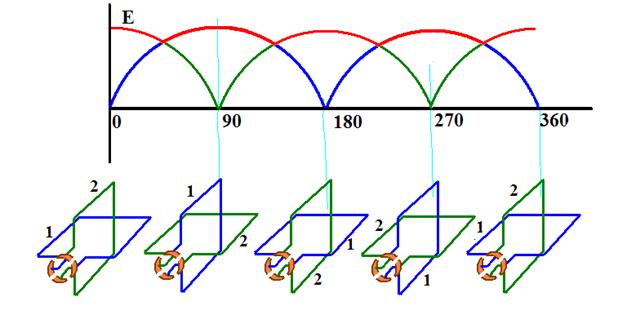 Если применить систему из двух рамок развернутых относительно друг друга на 90 градусов и кольцо, выполняющее роль коллектора разрезать на 4 части, то при вращении такой системы рамок получим не только выпрямленный, но и сглаженый ток. И чем больше рамок будет у реального генератора, тем более сглаженный ток будет вырабатывать генератор.
Если применить систему из двух рамок развернутых относительно друг друга на 90 градусов и кольцо, выполняющее роль коллектора разрезать на 4 части, то при вращении такой системы рамок получим не только выпрямленный, но и сглаженый ток. И чем больше рамок будет у реального генератора, тем более сглаженный ток будет вырабатывать генератор.
Коллектор генератора постоянного тока обеспечивает соединения обмотки якоря с внешней электрической цепью, а также выполняет роль механического выпрямителя.
ПРИНЦИП ОБРАТИМОСТИ МАШИН ПОСТОЯННОГО ТОКА.
| Двигатель | Генератор | |
| Обе электрические машины состоят из одних и тех же частей, но выполняют обратные превращения энергии | ||
| 
| |
| Электрическую энергию превращает в механическую | Механическую энергию превращает в электрическую | |
| Совпадают по направлению вращающий момент и направление вращения | Вращающий момент направлен в сторону противоположную направлению вращения | |
| ЭДС индуктируемая в обмотке якоря направлена против тока и приложенного напряжения | Совпадают по направлению ток и ЭДС |
| Вращающий момент вырабатываемый двигателем | 
| Электромагнитный момент сопротивления вращения |
| Противо-ЭДС направлена против тока и приложенного напряжения. | 
| Вырабатываемая ЭДС, обеспечивающая прохождение тока по замкнутой цепи. |
| Определение тока двигателя | 
| В режиме холостого хода напряжение генератора равно ЭДС |

| Определение скорости вращения якоря двигателя | 
| В нагрузочном режиме напряжение меньше ЭДС на величину падения напряжения в самом генераторе |
ОСНОВНЫЕ ЧАСТИ МАШИН ПОСТОЯННОГО ТОКА.
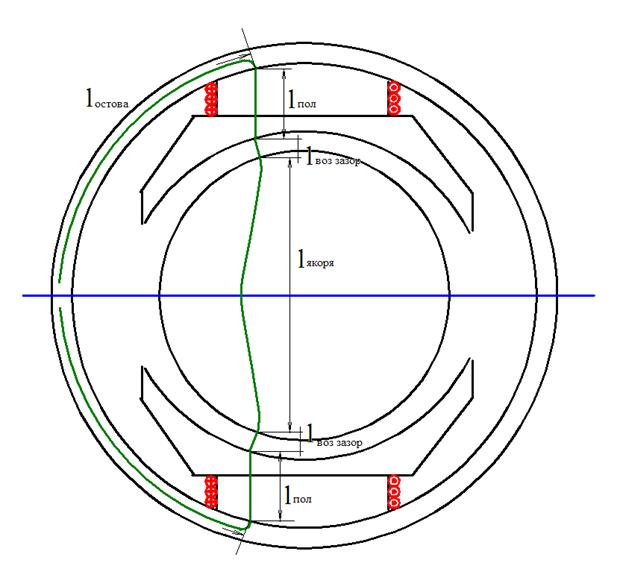
Магнитная система
Остов – являясь корпусом машины, одновременно выполняет роль магнитопровода;
Главные полюса – создающие основной магнитный поток, состоят из сердечников и катушек.
 Двухполюсная машина имеет два разноименных полюса расположенных напротив друг друга. Катушки главных полюсов включаются последовательно и встречно по направлению тока, так чтобы они образовывали разную полярность
Двухполюсная машина имеет два разноименных полюса расположенных напротив друг друга. Катушки главных полюсов включаются последовательно и встречно по направлению тока, так чтобы они образовывали разную полярность
Величина магнитного потока для магнитной цепи определяется по формуле:
 где:
где:
I*W– магнитодвижущая сила, определяется как произведение силы тока Iна количество витков катушек на обеих полюсах W
R магн магнитное сопротивление цепи состоящее из сопротивления остова; 2-х сердечников полюсов; сердечника якоря и 2-х воздушных зазоров.
Двухполюсная машина имеет одну пару полюсов и один магнитный поток выходящий из северного полюса пронизывающий тело якоря и уходящий в южный полюс.
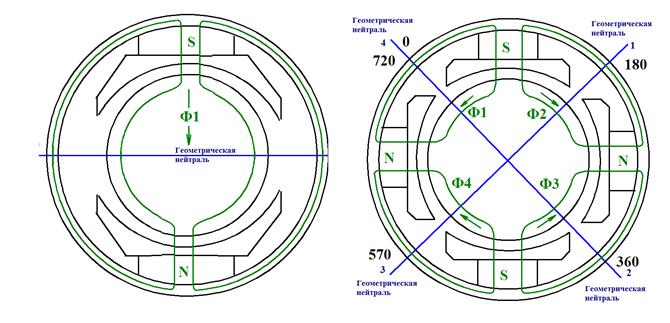
 У многополюсных машин количество магнитных потоков соответствует количеству главных полюсов. Соединения обмоток возбуждения могут выполняться различным способом.
У многополюсных машин количество магнитных потоков соответствует количеству главных полюсов. Соединения обмоток возбуждения могут выполняться различным способом.
Последовательное соединение всех катушек главных полюсов, обеспечивает относительно более равные по величине магнитные потоки. Но при очень больших токах нагрузки применяется смешанное соединение катушек полюсов.
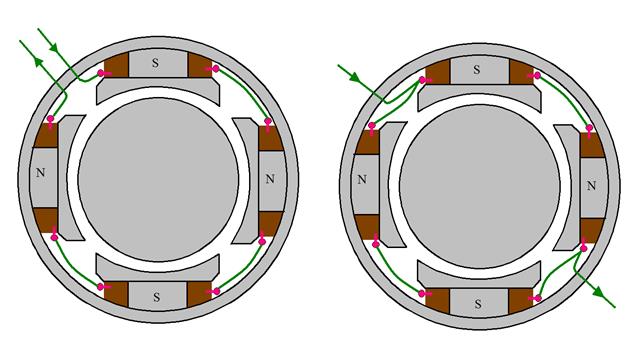
| Магнитные потоки относительно равны, так как по катушкам полюсов проходит один и тот же ток, а катушки имеют равное количество витков. Разность потоков образуется за счет неодинаковых воздушных зазоров из-за неточностей изготовления и сборки. | На разность магнитных потоков оказывает влияние качество контактов в соединениях катушек полюсов и возможная неравномерность распределения тока по параллельным ветвям. |
Обмотка якоря
Применяются основных три вида обмотки якоря:
Петлевая;
Волновая;
Смешанная
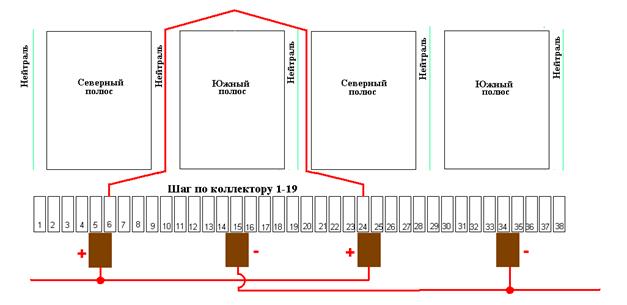
Простая петлевая обмотка:
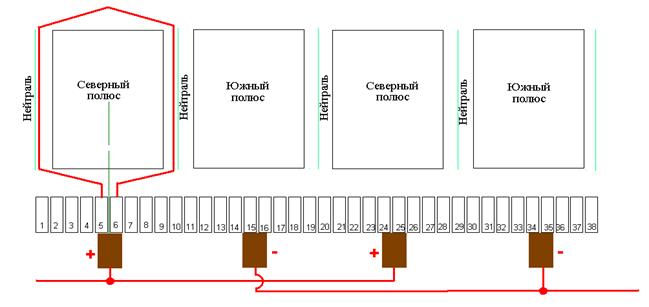
Шаг по коллектору 1; шаг по пазам якоря диаметральный. Укладка обмотки производится последовательно с 1-й на 2-ю; со 2-й на 3-ю и так до конца последняя секция укладывается с последней на 1-ю коллекторную пластину.
Петлевая обмотка имеет параллельные ветви прохождения по ней тока равно числу главных полюсов. Она применяется для машин работающих с большим током нагрузки.
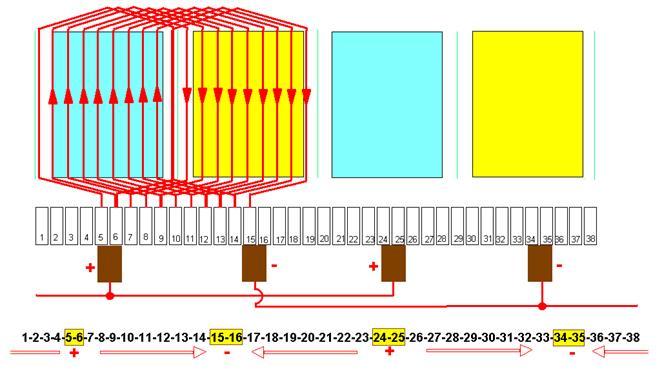
В связи с тем, что при вращении якоря в каждой параллельной ветви число последовательно работающих секций постоянно меняется в процессе работы в каждой параллельной ветви создается собственная ЭДС отличная от ЭДС в других параллельных ветвях. Так по нашей схеме между 6 и 15, а также между 25 и 34 коллекторными пластинами последовательно находятся по 9 секций, а между 5 и 35 также между 24 и 16 коллекторными пластинами последовательно находятся по 8 секций. Учетом реальной толщины щеток в процессе вращения якоря количество последовательных секций между положительными и отрицательными щетками будет постоянно меняться от 7 до 9 секций. С учетом того, что в реальной машине напряжение одной секции по расчетам составляет 14-16 Вольт, то разница ЭДС в параллельных секциях может достигать от 14 до 32 Вольт.
По этой причине в обмотке якоря между секциями создается разность потенциалов, под воздействием которой возникает уравнительный ток.
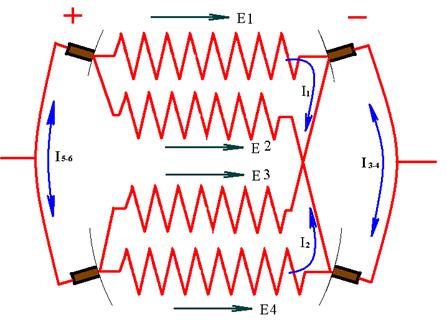
Отдельные уравнительные токи I1иI2 проходят не загружая щеточный аппарат машины, но токи I3-4 и I5-6 проходят через щеточный аппарат, усложняя работу щеток, повышая плотность тока в переходном контакте Щетка-Коллектор вызывают повышенное искрение под щетками и способствуют образования кругового огня.

Для разгрузки щеток от уравнительных токов при простой петлевой обмотке применяют уравнительные соединения 1-го рода. Которые соединят друг с другом коллекторные пластины одновременно находящиеся под плюсовыми или минусовыми щетками.
Уравнительные соединения чаще всего делают не на всех подряд коллекторных пластинах. А с учетом ширины щеток через одну и ли через две коллекторные пластины.
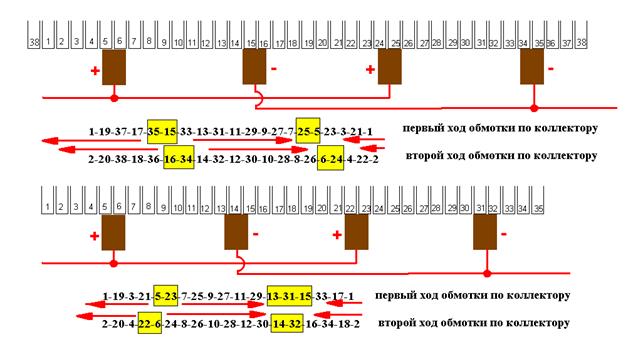
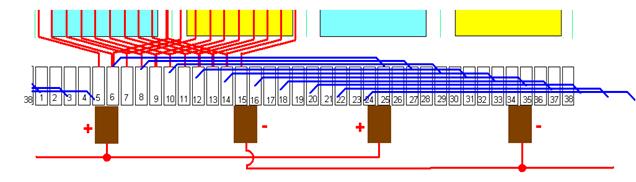 Для увеличения большего тока в машинах большой мощности применяется сложная (двузаходная) петлевая обмотка, имеющая увеличенный на одну шаг по коллектору. Секция начинается на 1-й коллекторной пластине, а заканчивается не на 2-й, а на 3-й коллекторной пластине. Такая обмотка имеет как бы два хода по коллектору один по четным коллекторным пластинам, а второй по нечетным пластинам. Так как щетка имеет ширину позволяющую перекрывать не одну а 3-4 коллекторные пластины количество параллельных ветвей удваивается. Такая обмотка обеспечивает прохождение тока в 2 раза большей величины, но при этом напряжение рабочее также в два раза должно быть снижено.
Для увеличения большего тока в машинах большой мощности применяется сложная (двузаходная) петлевая обмотка, имеющая увеличенный на одну шаг по коллектору. Секция начинается на 1-й коллекторной пластине, а заканчивается не на 2-й, а на 3-й коллекторной пластине. Такая обмотка имеет как бы два хода по коллектору один по четным коллекторным пластинам, а второй по нечетным пластинам. Так как щетка имеет ширину позволяющую перекрывать не одну а 3-4 коллекторные пластины количество параллельных ветвей удваивается. Такая обмотка обеспечивает прохождение тока в 2 раза большей величины, но при этом напряжение рабочее также в два раза должно быть снижено.

Такая обмотка имеет уравнительные соединения второго рода. Средняя точка каждой секции соединена со средней коллекторной пластиной секции. На примере секция начинается на 5-й, заканчивается на 7-й. средняя 6-я пластина. Такими уравнительными соединениями связывают четный и нечетный ход обмотки якоря.
Волновая обмотка
Применяется только на многополюсных машинах, это обмотка предназначается для работы с большим напряжением. Шаг по пазам якоря не отличается от петлевой обмотки, а шаг по коллектору у нее равен двум (электрическим) диаметрам.
 Последователь уложенные секции простой волновой обмотки образуют две параллельные ветви прохождения тока, причем рабочие стороны последовательно включенных секций располагаются под всеми полюсами машины и оказываются в абсолютно равных условиях и равных магнитных потоках.
Последователь уложенные секции простой волновой обмотки образуют две параллельные ветви прохождения тока, причем рабочие стороны последовательно включенных секций располагаются под всеми полюсами машины и оказываются в абсолютно равных условиях и равных магнитных потоках.
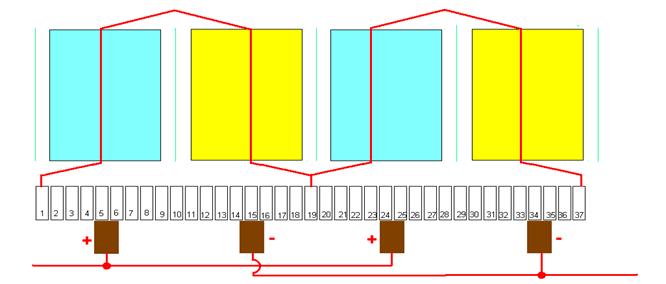
При этом часть секций накоротко замкнута одноименными щетками, и выполняет роль уравнительных соединений.
Если увеличить число коллекторных пластин на одну или уменьшить на три и сохраним шаг по коллектору получим сложную двухзаходную волновую обмотку.
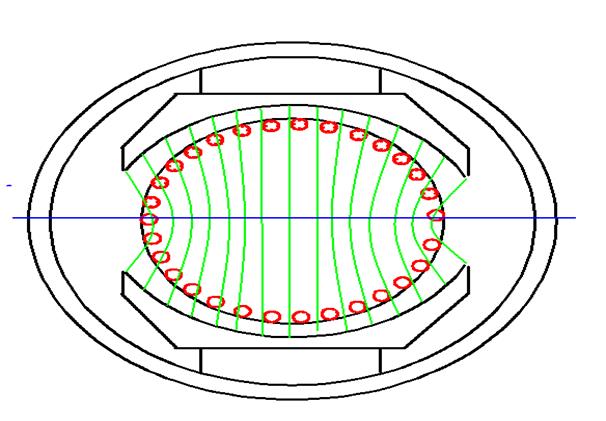 Реакция якоря
Реакция якоря
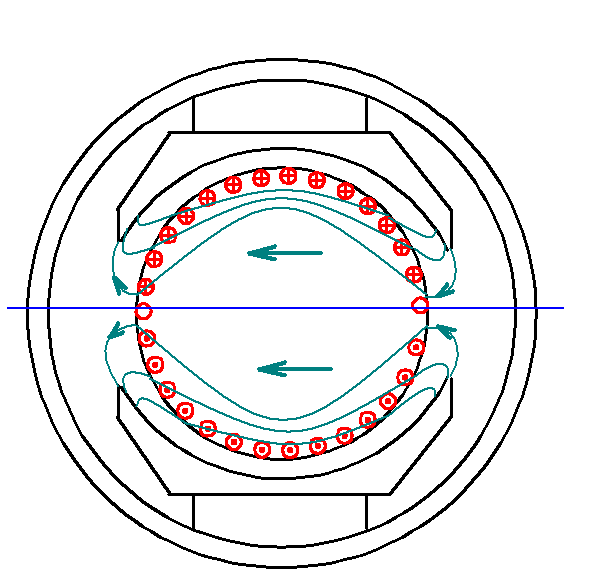
Главные полюса электрической машины создают основной магнитный поток, который под подошвой полюса должен быть равномерным. Обеспечивая равное воздействие на активные проводники обмотки якоря. Но такой поток сохраняется только на холостом ходу.
Как только машина начинает работать под нагрузкой и в обмотке якоря появляется ток обмотка якоря создает свой магнитный поток, направленный перпендикулярно магнитному потоку главных полюсов. В результате взаимодействия этих двух магнитных потоков происходит искажение магнитного потока главных полюсов, это явление и получило название РЕАКЦИЯ ЯКОРЯ.
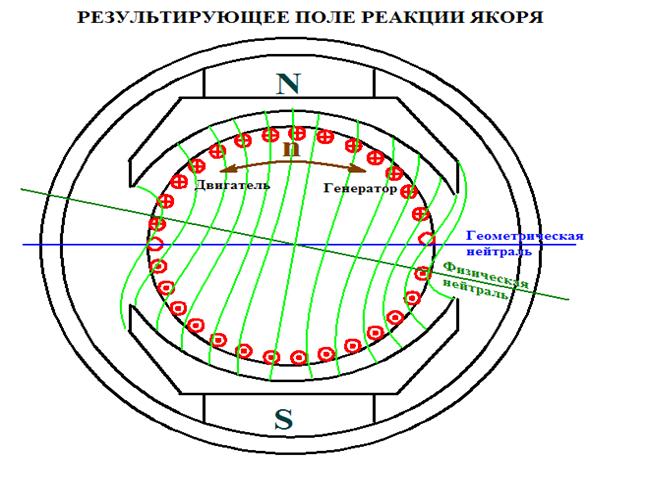
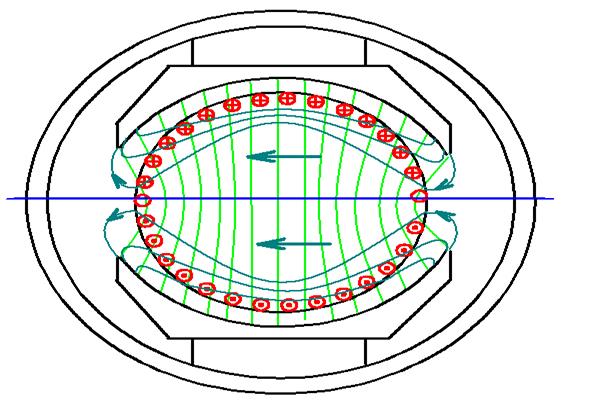
В результате реакции якоря нарушается равномерность магнитного потока под подошвами главных полюсов он ослабляется с одной стороны полюса и усиливается с другой стороны. У генераторов усиление поля происходит под сбегающим краем полюсов, а у двигателя наоборот под набегающим краем полюса. А также происходит смещение оси симметрии магнитного потока с геометрической на физическую нейтраль.
 Последствия реакции якоря.
Последствия реакции якоря.
1. Неравномерное распределение магнитного потока главных полюсов и как следствие уменьшение суммарного магнитного потока и уменьшение мощности машины.
2. Ухудшение условий коммутации. повышенное искрение под щетками.
3. В момент прохождения активными проводниками секций под краями полюсов с увеличенным магнитным потоком резко возрастает напряжение на коллекторных пластинах этой секции. Возможность возникновения кругового огня.
Устранение вредных последствий реакции якоря.
На машинах малой мощности до 1 кВт., работающих с постоянной нагрузкой и не меняющих направление вращения применяется сдвиг щеток с геометрической на физическую нейтраль. Щеткодержатели устанавливаются на поворотную траверсу. Во время работы машины, поворачивая траверсу, находят положение с минимальным искрением щеток и потреблением наименьшего тока и в этом положении траверсу закрепляют.
В машинах большей мощности обязательно применяются добавочные полюса, которые устанавливают на геометрической нейтрали, между главными полюсами. Добавочные полюса создают магнитный поток направленный встречно магнитному потоку обмотки якоря, а чтобы эти два потока всегда соответствовали друг другу катушки добавочных полюсов всегда включаются последовательно с обмоткой якоря.
Полярность дополнительных полюсов
Для машин мощностью более 250 кВт дополнительно используют компенсационную обмотку, укладываемую в пазы подошвы главных полюсов и включенных в схему машины также как и дополнительные полюса, последовательно с обмоткой якоря.
Коммутация
 Понятие коммутация – это изменение состояния электрической цепи, то есть любое ее изменение. Но если в обычных электрических цепях переключения происходят относительно редко, то при работе любой электрической машины переключения в большом количестве происходят постоянно. Рассмотрим переход секции якоря из одной параллельной ветви в другую в момент когда ее коллекторные пластины проходят под щеткой.
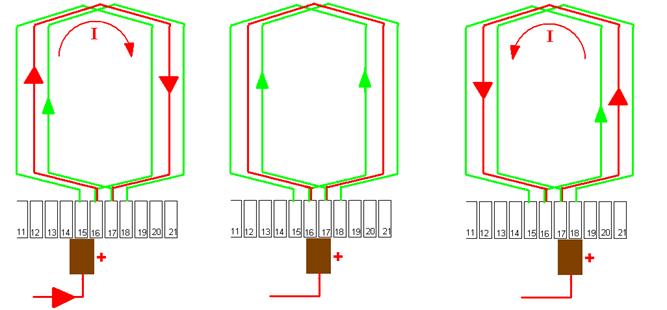
Понятие коммутация – это изменение состояния электрической цепи, то есть любое ее изменение. Но если в обычных электрических цепях переключения происходят относительно редко, то при работе любой электрической машины переключения в большом количестве происходят постоянно. Рассмотрим переход секции якоря из одной параллельной ветви в другую в момент когда ее коллекторные пластины проходят под щеткой.
Первая позиция-начало коммутации рабочий ток в секции протекает по часовой стрелке с 16 на 17 коллекторную пластину;
Вторая позиция- секция с 16 на 17 коллекторные пластины накоротко замкнута щеткой рабочего тока в ней нет;
Третья позиция-окончание коммутации. 16 коллекторная пластина вышла из под щетки и ток в секции протекает против часовой стрелки с 17 на 16 коллекторную пластину.
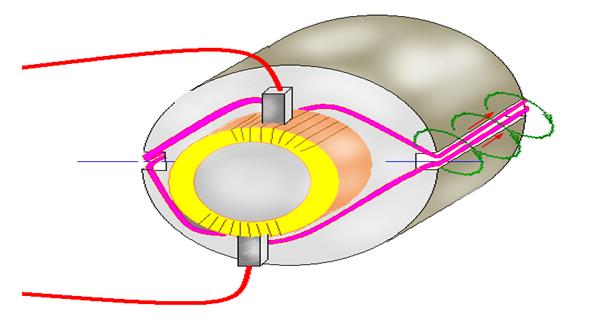
А процесс коммутации перешел на следующую секцию. И это одновременно происходит под всеми щетками машины.
Так, как этот процесс протекает за очень короткое время, в коммутируемой секции создается реактивная ЭДС состоящая из ЭДС самоиндукции и ЭДС взаимоиндукции. И эти обе ЭДС направлены на поддержание в коммутируемой секции тока предшествующего процессу коммутации.
ер = ес + ев
На рисунке видно, что активные проводники двух, одновременно коммутирующих секций, находятся в одном пазу и наводят друг в друге ЭДС взаимоиндукции.
В результате действия реакции якоря в этих же проводниках, пересекающих геометрическую нейтраль создается еще и 3-я ЭДС вращения, (евр) которая направлена также как и реактивная ЭДС. А так как секции накоротко замкнуты щетками в них возникает ток коммутации.
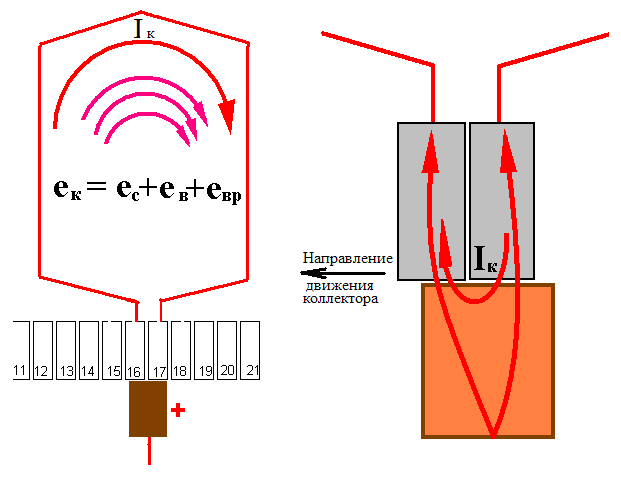
Коммутирующий ток проходя через коллекторные пластины и щетки приводит к перераспределению силы тока между коллекторными пластинами и щеткой. Так между щеткой и набегающей коллекторной пластиной ток нагрузки и коммутирующий ток направлены встречно друг другу, следовательно результирующий ток перехода уменьшается, а на сбегающей коллекторной пластине ток нагрузки и коммутирующий ток направлены в одну сторону, следовательно результирующий ток перехода увеличивается. При этом, так как коллекторная пластина уходит из под щетки и площадь контакта стремительно уменьшается, плотность тока нарастает и в момент отрыва коллекторной пластины от щетки происходит разрыв тока большой плотности, что и приводит к образованию искрения.
Таким образом, коммутация электрических машин постоянного тока характеризуется степенью искрения под щетками. Различают 5 степеней коммутации.
| темная | Практически искрения нет | Допускается работа машины без ограничения | |
| слабая | Незначительное искрение | |

| средняя | Искрение наблюдается на половине щеточного пространства | |
| сильная | Искрение наблюдается на большей части щеточного пространства | Не допустимые режимы работы машины | |
| тяжелая | Сплошное искрение с вылетом крупных снопов огня |
37. Способы возбуждения генераторов постоянного тока. Основные характеристики генератора постоянного тока.
ГПТ широко применяются в различных промышленных, транспортных и других установках для питания двигателей постоянного тока, возбуждения синхронных машин, для питания гальванических установок и т.д.
По способу возбуждения (рис.1.45) ГПТ делятся на генераторы с самовозбуждением и генераторы с независимым возбуждением. Генераторы независимого возбуждения могут возбуждаться от постороннего источника постоянного тока (электромагнитное возбуждение) или от постоянных магнитов (магнитоэлектрическое возбуждение).
Генераторы с самовозбуждением делятся на генераторы параллельного (шунтового), последовательного (сериесного) и смешанного (компаундного) возбуждения.
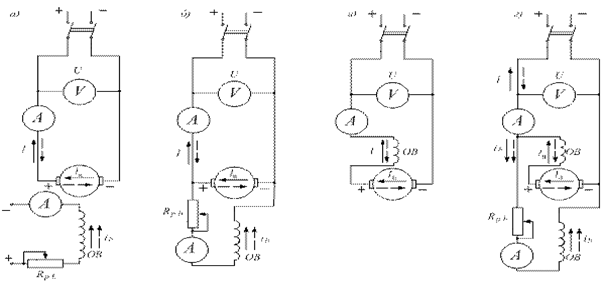
Рис. 1.45. Схемы возбуждения генераторов:
а) независимое; б) параллельное; в) последовательное; г) смешанное.
Уравнение напряжения генератора имеет вид:
 (1.137)
(1.137)
где  – э.д.с. якоря; Rа – полное сопротивление якоря.
– э.д.с. якоря; Rа – полное сопротивление якоря.
Работа ГПТ независимого возбуждения определяется следующими основными характеристиками:
1) холостого хода;
2) короткого замыкания;
3) внешняя;
4) регулировочная;
5) нагрузочная.
Достоинства и недостатки генераторов с независимым возбуждением.
Достоинства в том, что независимая обмотка возбуждения позволяет независимо изменять поток возбуждения в широком диапазоне вниз от номинальной величины по любому закону, в том числе и требуемому по технологии, и изменять выходное напряжение так же по требуемому закону.
Недостаток является продолжением достоинства генератора независимого возбуждения: для независимой обмотки возбуждения требуется отдельный источник питания.
Схема для снятия характеристик генератора постоянного тока независимого возбуждения представлена на рис. 1.46, а энергетическая диаграмма показана на рис. 1.47.
 Рис. 1.46. Схема для снятия характеристик
Рис. 1.46. Схема для снятия характеристик
38. Построить механическую и скоростную (электромеханическую) характеристики двигателя постоянного тока независимого возбуждения по паспортным данным .
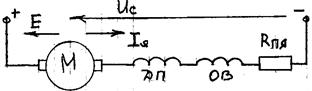
Схема включения:
Обмотки возбуждения ДПТ ПВ включены последовательно с якорем. Поток возбуждения двигателя будет определятся нагрузкой на валу двигателя. Уравнение равновесия напряжения данного двигателя имеет вид Uc=E+Iя(Rz+Rпя+Rов); Е=КФ(Iя)w.
 ;
;
 .
.
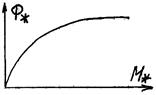
Т.е. вид уравнения данного двигателя аналогичен виду ДПТ НВ, но в эти двигатели дополнительно входит сопротивление обмотки возбуждения и, в отличие от двигателя независимого возбуждения, нельзя аналитически в общем виде получить электромеханические скоростные характеристики двигателя, так как поток и ток возбуждения связаны нелинейной зависимостью, которую трудно представить в виде формулы. Для построения электромеханических и механических характеристик необходимо знать зависимости Ф*(Iя*) и М*(Iя*) , которые были бы универсальными для всей серии двигателей. Эти зависимости существуют, так как внутри одной серии зазоры и степень насыщения машин мало отличаются друг от друга для всех машин.
Приблизительно вид таких зависимостей следующий:
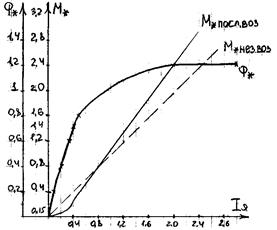
I зона - Iя*£0,3; М*£0,15;
II зона - Iя*=0,3¸1,3; М*=0,15¸1,4;
III зона - Iя*>1,3; М*>1,4.
Следует обратить внимание, что при токе Iя*>1 момент, развиваемый двигателем с последовательным возбуждением, возрастает в большей степени, чем ток М*>Iя* и эта ситуация является одним из достоинств двигателей с последовательным возбуждением. При одной и той же перегрузке по току двигатели последовательного возбуждения развивают больший момент. Это связанно с тем, что с увеличением тока растет поток двигателя. Так для двигателя независимого возбуждения:
Iя*доп=2¸2,5 - М*=2,0¸2,5 – НВ
Iя*доп=2¸2,5 - М*=2,4¸3,0 – ПВ
Зная зависимости Ф*(Iя*) и М*(Iя*), можно построить одну зависимость Ф*(М*)
Для полного представления о характеристиках двигателя с последовательным возбуждением пользуются кусочно-линейной аппроксимацией кривой намагничивания Ф(Iя).
1,2 зона: Ф=a1Iя; М=КФIя;  ;
;  ;
;
 ;
;
 .
.
3 зона: Ф=Ф0+a2Iя
Из выражения скоростных характеристик видно, что они представляют из себя кривые гиперболического вида одной из асимптот, которой является ось ординат, а второй -асимптотой говорить не имеет смысла, так как она соответствует Iя®¥, М®¥, т.е. она лежит вне аппроксимации.
Из выражения электромеханических характеристик видно, что при идеальном холостом ходе, когда ток якоря и момент стремятся к нулю, скорость двигателя w®¥. В действительности при токе якоря равном нулю, есть остаточное магнитное поле Фост*=0,02¸0,09 и наличие остаточного поля беспечивает величину скорости идеального холостого хода  . Скорость при этом превышает номинальную скорость в 10 раз, что недопустимо из условия прочности коллектора и бандаже крепящих обмоток якоря.
. Скорость при этом превышает номинальную скорость в 10 раз, что недопустимо из условия прочности коллектора и бандаже крепящих обмоток якоря.
Следует заметить, что допустимым значением идеального холостого хода для выпускаемых двигателей является w0*доп<4.
Данные двигатели последовательного возбуждения нельзя применять для механизмов, у которых возможен режим холостого хода с малыми потерями. Эти двигатели запрещается применять для механизмов с использованием цепных, ременных и клиноременных передач.
Наибольшая крутизна электромеханических характеристик в начальной части. Участок линейной аппроксимации в третей зоне обеспечивает более пологую механическую характеристику. На участках большей нагрузки Iя*>2, крутизна электромеханических характеристик практически не зависит от нагрузки. При полюсном насыщении магнитной цепи двигателя уравнение двигателя последовательного возбуждения становится аналогичным что и для двигателей с независимым возбуждением. В этом случае электромеханические характеристики будут представлять из себя прямые линии.
39. Двигатели постоянного тока последовательного и смешанного возбуждения.
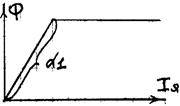
Двигатель с параллельным возбуждением. В этом двигателе (рис. 8.59, а) обмотка возбуждения подключена параллельно с обмоткой якоря к сети. В цепь обмотки возбуждения включен регулировочный реостат Rр.в., а в цепь якоря — пусковой реостат Rп . Характерной особенностью двигателя является то, что его ток возбуждения Iв не зависит от тока якоря Iа (тока нагрузки), так как питание обмотки возбуждения по существу независимое. Следовательно, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. При этом условии согласно (8.84) и (8.85) получаем, что зависимости М = f(Ia ) и n = f(Ia) (моментная и скоростная характеристики) линейные (рис. 8.59,б). Следовательно, линейна и механическая характеристика двигателя n = f(M) (рис. 8.60, а).
Если в цепь якоря включен добавочный резистор или реостат Rп , то
п = [U - Iа(ΣRа + Rn )]/(свФ) = n0 - Δn, (8.86)

Рис. 8.59. Схема двигателя с параллельным возбуждением и его моментная и скоростная характеристики.
где n0 = U/(свФ) — частота вращения при холостом ходе; Δп = (ΣRа + Rn )Iа /(свФ) — снижение частоты, обусловленное суммарным падением напряжения во всех сопротивлениях, включенных в цепь якоря двигателя. Величина Δn , зависящая от суммы сопротивлений ΣRа + Rn , определяет наклон скоростной n = f(Ia) и механической n = f(M) характеристик к оси абсцисс.
Двигатель с последовательным возбуждением. В этом двигателе (рис. 8.61, а) ток возбуждения Iв = Ia, поэтому магнитный поток Ф является некоторой функцией тока якоря Ia. Характер этой функции изменяется в зависимости от нагрузки двигателя. При Ia < (0,8 ÷ 0,9)Iном, когда магнитная система машины не насыщена, Ф = kф Ia , причем коэффициент пропорциональности kф в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании тока якоря поток Ф возрастает медленнее, чем Ia , и при больших нагрузках (Ia > Iном ) можно считать, что Ф ≈ const. В соответствии с этим изменяются в зависимости n = f(Ia) и М = f(Ia). При Ia <(0,8 ÷ 0,9)Iном скоростная характеристика двигателя n = f(Ia) (рис. 8.61, б) имеет форму гиперболы, так как частота вращения: где С1 и С2 - постоянные.

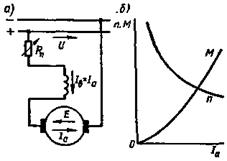
Рис. 8.61. Схема двигателя с последовательным возбуждением и его моментная и скоростная характеристики.
Двигатель со смешанным возбуждением. В этом двигателе (рис. 8.63, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной и последовательной. Поэтому его механические характеристики (рис. 8.63,б, кривые 3 и 4) располагаются между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения МДС параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (при малой МДС последовательной обмотки) или к характеристике 2 (при малой МДС параллельной обмотки). Одним из достоинств двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, так как его частота вращения n0 имеет конечное значение.
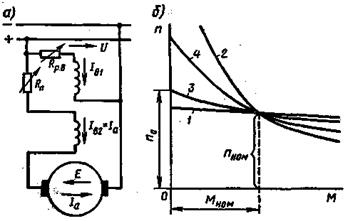
Рис. 8.63. Схема двигателя со смешанным возбуждением и его механические характеристики.
40. Потери мощности и КПД машин постоянного тока.
КПД машины является отношением полезной выходной мощности Р2 к подводимой Р1. Для определения КПД, как правило, применяются косвенные методы, при которых вычисляются потери мощности при нагрузке.
Наиболее просто определяются электрическая мощность на выходе генератора Р2 и мощность, подводимая к двигателю, Р1. Поэтому выражения КПД для генераторов и двигателей обычно отличаются друг от друга:
для генераторов  ; (27)
; (27)
для двигателей  . (28)
. (28)
Определение выходной мощности и порядка учета потерь двигателя с параллельным возбуждением показаны на диаграмме (рис. 17).
Потери в цепи якоря двигателя параллельного возбуждения рм состоит из потерь в сопротивлениях обмотки якоря rя, обмотки добавочных полюсов rд.п, компенсационной rк (при наличии), а также потерь в контакте щетки – коллектор. Сопротивление цепи берется при температуре 750С, падение напряжения в контакте щетки – коллектор ΔU принимается неизменным (1,5…2 В). Исходя из этого,
 . (29)
. (29)
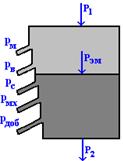
Рисунок 17
Потери в цепи якоря двигателя последовательного возбуждения состоят из потерь в сопротивлениях обмотки якоря rя, добавочных полюсов rд.п, последовательной обмотки rп.о и потерь в контакте щетки – коллектор ΔU:
 . (30)
. (30)
Потери в сопротивлении цепи возбуждения двигателя параллельного возбуждения
 . (31)
. (31)
Вращение сердечника якоря, обусловливает потери мощности в стали рс при перемагничивании: на гистерезис (потери пропорциональны частоте перемагничивания и наибольшей магнитной индукции в степени, близкой ко второй); на вихревые токи (потери пропорциональны частоте перемагничивания и магнитной индукции в квадрате). Двигатели параллельного возбуждения работают в большинстве случаев при малоизменяющихся скоростях вращения и магнитных потоках, поэтому эти потери можно считать неизменными. У двигателей с последовательным возбуждением произведение скорости вращения на магнитный поток остается примерно неизменным, что определяет некоторое уменьшение потерь при увеличении нагрузки. Вихревые токи и гистерезис оказывают тормозящее действие на якорь.
Механические потери рмх обусловлены трением вала якоря в подшипниках, трением щеток по коллектору при вращении, трением якоря в воздухе и вентиляционным действием при вращении якоря и вентилятора двигателя. Эти потери при малоизменяющейся скорости вращения остаются неизменными.
Добавочные потери рдоб принимаются равными 1% от мощности двигателя, в них учитываются различные трудноопределимые потери: потери в полюсных наконечниках, обусловленные пульсациями магнитного поля, и пр.
В потери холостого хода рх.х входят потери рс, рмх и рдоб:
 . (32)
. (32)
После вычитания из значения подводимой мощности Р1 потерь рм и рв получим электромагнитную мощность Рэм, передаваемую якорю, равную произведению электромагнитного момента Мэм на частоту вращения ω:
 . (33)
. (33)
Мощность на валу двигателя
 . (34)
. (34)
Группы соединения трехфазных трансформаторов
Группой соединения трансформатора называется угол сдвига между линейными ЭДС первичной и вторичной обмоток трансформатора. За первичную обмотку принимают обмотку высокого напряжения.
Группа соединения зависит от:
от направления намотки;
маркировки концов обмотки;
схемы соединения обмоток.
Группы соединения трехфазных трансформаторов:
1) соединение /D, рис 30. Рис. 30
2) соединение / , рис. 31.
Рис. 31
Группы соединения необходимо знать для включения трансформаторов на параллельную работу.
9. Трансформаторы измерительные: устройство, назначение, типы.
Дата: 2019-02-02, просмотров: 512.