Сварочный трансформатор – это аппарат, преобразующий переменное напряжение сети в переменное напряжение для сварки (как правило, понижает переменное напряжение до значения менее 141 В).т.е увеличивает ток понижает напряжение.
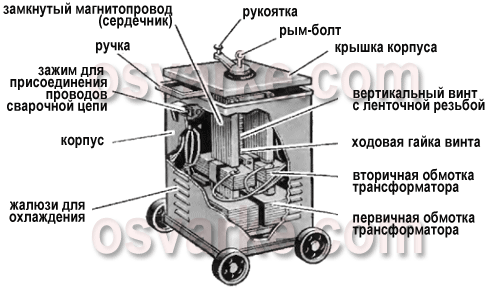
Рисунок. Устройство сварочного трансформатора (с подвижными обмотками)
Регулирование силы тока в таком сварочном трансформаторе осуществляется с помощью подвижной обмотки.
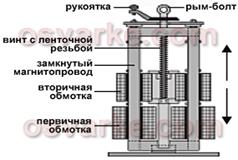
Рисунок. Схема регулирования тока в сварочном трансформаторе с подвижными обмотками
Принцип действия трансформатора основан на явлении электромагнитной индукции. Сварочный трансформатор (рис. 6) имеет стержневой сердечник 2 и смонтированные на нем первичную 1 и вторичную 3 обмотки.
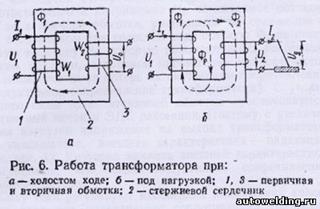
Режим холостого хода трансформатора (рис. 6, а) устанавливают (при разомкнутой цепи вторичной обмотки) в момент подключения первичной обмотки к сети переменного тока с напряжением U1. При этом в первичной обмотке проходит ток I1, который создает в сердечнике переменный магнитный поток Ф1. Этот поток создает во вторичной обмотке переменное напряжение U2. Поскольку цепь вторичной обмотки разомкнута, ток в ней не проходит, и никаких затрат энергии во вторичной цепи нет. Поэтому вторичное напряжение при холостом ходе максимально. Эта величина — напряжение холостого хода.
Отношение напряжений на первичной и вторичной обмотках при холостом ходе (коэффициент трансформации k) равно отношению количества витков первичной W1 и вторичной W2 обмоток. В сварочных трансформаторах сетевое напряжение 220 или 380 В преобразуется в более низкое — 60...90 В. Такие трансформаторы называются понижающими.
Внешняя характеристика источников питания (сварочного трансформатора, выпрямителя и генератора) - это зависимость напряжения на выходных зажимах от величины тока нагрузки. Зависимость между напряжением и током дуги в установившемся (статическом) режиме называется вольт-амперной характеристикойдуги.
Внешние характеристики источников питания сварочной дуги показаны на рис. 90.
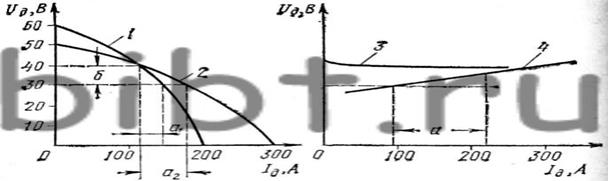
Рис. 90. Внешние характеристики источников питания:
1 - крутопадающая, 2 - пологопадающая, 3 - жесткая, 4 - пологовозрастающая
Длина дуги связана с ее напряжением: чем длиннее сварочная дуга, тем выше напряжение. Чем круче характеристика, тем меньше влияет длина сварочной дуги на сварочный ток. При изменении напряжения на величину δ при крутопадающей характеристике изменение тока равно а1, при пологопадающей - а2.
Для обеспечения стабильного горения дуги необходимо, чтобы характеристика сварочной дуги пересекалась с характеристикой источника питания (рис. 91).
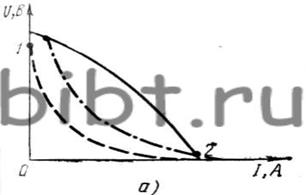
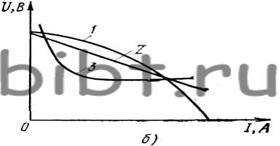
Рис. 91. Внешние характеристики источников питания (а) и сварочной дуги (б) (сплошная линия - генератора, штриховая - дуги в момент возбуждения, штрихпунктирная - дуги при горении)
В момент зажигания дуги (рис. 91, а) напряжение падает по кривой от точки 1 до точки 2 - до пересечения с характеристикой генератора, т. е. до положения, когда электрод отводится от поверхности основного металла. При удлинении дуги до 3-5 мм напряжение возрастает по кривой 2-3 (в точке 3 осуществляется устойчивое горение дуги). Обычно ток короткого замыкания превышает рабочий ток, но не более чем в 1,5 раза. Время восстановления напряжения после короткого замыкания до напряжения дуги не должно превышать 0,05 с.
11. Назначение автотрансформаторов. Особенности конструкции АТ, их достоинства и недостатки
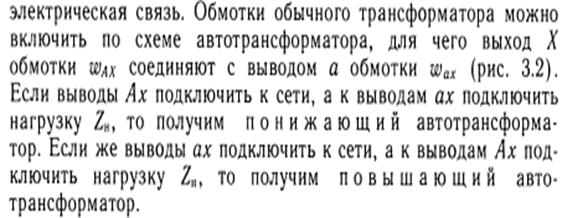
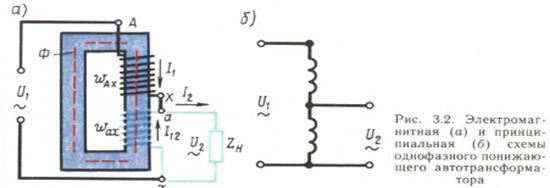
Автотрансформатор - это такой вид трансформатора, в котором помимо магнитной связи между обмотками еще имеется электрическая связь. Автотр. преобразует напряжение тока до номинальных параметров. Используется для плавного выравнивания ( регулирования) электрического напряжения в сети и питания лабораторных установок.
Sрасч.= U2+I12- расчетная мощность в автотрансформаторе составляет лишь часть проходной. Это дает возможность для изготовления автотрансформатора использовать магнитопровод меньшего сечения, чем в трансформаторе равной мощности. Средняя длина витка тоже уменьшается. Следовательно уменьшается расход меди на изготовление. Одновременно уменьшаются магнитные и электрические потери, повышается КПД.
Достоинства АВТ: повышенный КПД, меньше расход стальн. и медн. материалов.
Недостатки: электрическая связь между цепями вторичной и первичной обмоток.
12. Физические процессы в асинхронной машине при неподвижном роторе.
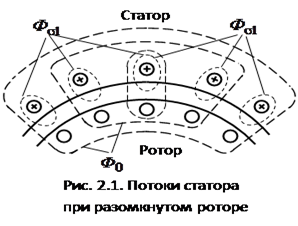
Пусть ротор асинхронной машины разомкнут и неподвижен, а статорная обмотка включена в сеть с напряжением U1 и частотой f1. В этом случае асинхронная машина представляет собой трансформатор при холостом ходе. Первичной обмоткой является статорная обмотка, а вторичной – обмотка неподвижного ротора. Под действием напряжения U1 по обмотке статора протекает ток холостого хода I0. Образуемая этим током МДС F0 создает поток, одна часть которого Ф0 сцеплена с обмотками обеих частей машины (основной поток), а другая часть (поток рассеяния) Фs1 - только с обмоткой статора (рис. 2.1). При числе пар полюсов машины –
 частота вращения n1 МДС F0 и соответственно потока Ф0 определяется по формуле (1.4): n1 = f1/р. Основной поток при неподвижном роторе создает в обмотках статора и ротора ЭДС, определяемые по формулам:
частота вращения n1 МДС F0 и соответственно потока Ф0 определяется по формуле (1.4): n1 = f1/р. Основной поток при неподвижном роторе создает в обмотках статора и ротора ЭДС, определяемые по формулам:
 , (2.1)
, (2.1)
 . (2.2)
. (2.2)
Поток рассеяния  создает в обмотке статора ЭДС рассеяния:
создает в обмотке статора ЭДС рассеяния:
 , (2.3)
, (2.3)
где х1- индуктивное сопротивление рассеяния обмотки статора.
На активном сопротивлении обмотки статора при протекании тока  происходит падение напряжения
происходит падение напряжения  . Таким образом, как и в случае трансформатора, уравнение напряжений статорной обмотки асинхронной машины представим в виде
. Таким образом, как и в случае трансформатора, уравнение напряжений статорной обмотки асинхронной машины представим в виде
 . (2.4)
. (2.4)
С учетом выражения (2.4) относительно напряжения
 . (2.5)
. (2.5)
Уравнение напряжений статорной обмотки асинхронной машины повторяет аналогичное уравнение первичной обмотки трансформатора. Отличие этих уравнений заключается в величине тока холостого хода. В асинхронной машине между статором и ротором имеется воздушный зазор и для проведения через него магнитного потока требуется большей величины МДС (  ). Поэтому ток холостого хода асинхронной машины обычно составляет от 20 до 50 % от IH, что значительно больше тока холостого хода трансформатора (от 1 до 8 % от IH). Выше падение напряжения в обмотке статора асинхронной машины в сравнении с обмоткой трансформатора.
). Поэтому ток холостого хода асинхронной машины обычно составляет от 20 до 50 % от IH, что значительно больше тока холостого хода трансформатора (от 1 до 8 % от IH). Выше падение напряжения в обмотке статора асинхронной машины в сравнении с обмоткой трансформатора.
Потери мощности при холостом ходе асинхронной машины с неподвижным ротором больше, чем в трансформаторе. Они складываются из потерь электрических в обмотке статора:
рЭЛ0 =  (2.6) и магнитных потерь в магнитопроводе статора и ротора:
(2.6) и магнитных потерь в магнитопроводе статора и ротора:  . На покрытие этих потерь машиной потребляется из сети мощность
. На покрытие этих потерь машиной потребляется из сети мощность
 . (2.7)
. (2.7)
Потребляемой активной мощностью определяется активная составляющая тока холостого хода:
 .
.
13. Электромагнитный момент асинхронной машины.
Момент, развиваемый двигателем равен электромагнитной мощности, деленной на синхронную скорость вращения электропривода.
M = Pэм/ω0
Электромагнитная мощность – это мощность, передаваемая через воздушный зазор от статора к ротору, и она равна потерям в роторе, которые определяются по формуле:
Pэм = m • I22 • (r2’/s)
m – число фаз.
M = Mэм = (Pm/ω0) • (I2’)2 • (r2’/s)
Электромеханической характеристикой асинхронного двигателя является зависимость I2’ от скольжения. Но так как асинхронная машина работает только в качестве электродвигателя, основной характеристикой является механическая характеристика.
M = Mэм = (Pm/ω0) • (I2’)2 • (r2’/s) – упрощенное выражение механической характеристики.
Подставив в это выражение значение тока, получим:
M = [P•3•Uф2•(r2’/s)] / [ω0•[(r1 + r2’/s)2 + (x1 + x2’)2]]
Будем считать, что m=3.
Ω = ω0/p
Вместо ω0 нужно подставить механическую скорость, в результате чего число пар полюсов сокращается.
M = [3•Uф2•(r2’/s)] / [ω0•[(r1 + r2’/s)2 + (x1 + x2’)2]] – это уравнение механической характеристики асинхронного двигателя.
При переходе асинхронного двигателя в генераторный режим, скорость вращения ω > ω0 и скольжение становится отрицательным (s Когда скольжение изменяется от 0 до +∞, режим называется «режимом электромагнитного тормоза».
Задаваясь значениями скольжения от о до +∞, получим характеристику:
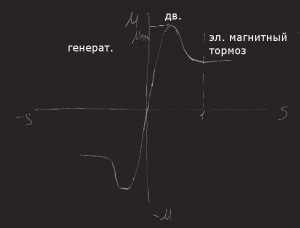
Полная механическая характеристика асинхронного двигателя.
Как видно из механической характеристики, она имеет два экстремума: один на отрезке изменения скольжения на участке от 0 до +∞, другой на отрезке от 0 до -∞.
dM/ds=0
Mmax = [3•Uф2•(r2’/s)] / [2ω0•[r1 ± √(r12 + (x1 + x2’)2)]]
+ относится к двигательному режиму.
– относится к генераторному режиму.
Mmax=Mкр
Mкр – критический момент.
Скольжение, при котором момент достигает максимума, называется критическим скольжением, и оно определяется по формуле:
sкр = ±[r2’/(x1+x2’)]
Критическое скольжение имеет одинаковое значение и в двигательном и в генераторном режимах.
Величину Mкр можно получить, подставив в формулу момента значение критического скольжения.
Момент при скольжении равном 1 называется пусковым моментом. Выражение для пускового момента можно получить, подставив 1 в формулу:
Mп = [3•Uф2•r2’] / [ω0•[(r1 + r2’)2 + (x1 + x2’)2]]
Поскольку знаменатель в формуле момента максимального на несколько порядков больше Uф, принято считать Mкр≡Uф2.
Критическое скольжение зависит от величины активного сопротивления обмотки ротора R2’. Момент пусковой, как видно из формулы, зависит от активного сопротивления ротора r2’. это свойство пускового момента используется в асинхронных двигателях с фазным ротором, у которых пусковой момент увеличивают путем введения активного сопротивления в цепь ротора.
14. ЭДС, индуктируемые в обмотках машин переменного тока.
Электродвижущая сила в обмотке электрической машины индуктируется только при условии изменения потокосцепления магнитного поля с витками катушки, что находит отражение в известном соотношении:
отражающем закон электромагнитной индукции. Потокосцепление может изменяться под действием различных причин.
При вращении витка в магнитном поле или при перемещении магнитного поля относительно неподвижного витка в нем индуктируется ЭДС, которую называют ЭДС вращения. При изменении во времени потока, сцепленного с неподвижным витком, в нем индуктируется так называемая трансформаторная ЭДС. Во всех случаях величина и характер изменения индуктируемой ЭДС определяется величиной и характером изменения потокосцепления и также параметрами витка.
Определим ЭДС в одной катушке обмотки статора синхронного генератора, имеющей число витков Wк и диаметральный шаг (рис. 3).
Частота индуктируемой в витке ЭДС определяется скоростью вращения и числом пар полюсов ротора. Одному повороту двухполюсного ротора соответствует один период изменения ЭДС. Для того чтобы в двухполюсном СГ получить частоту ЭДС 50 Гц, необходимо вращать ротор со скоростью 50 оборотов в секунду или 3000 оборотов в минуту. При увеличении числа полюсов скорость вращения ротора будет пропорционально уменьшается. В общем случае, если ротор имеет 2р полюсов и вращается со скоростью n об/мин, то частота ЭДС равна:

Величину ЭДС вращения удобно определить по соотношению: 
из которого ясно видна зависимость формы кривой ЭДС от характера распределения магнитной индукции на полюсном делении.
Одно из основных требований, предъявляемых к генераторам переменного тока, заключается в обеспечении синусоидальности изменения во времени ЭДС, индуктируемой в обмотке статора, т.е. в обеспечении зависимости:
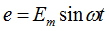
15. Принцип действия трехфазной машины с короткозамкнутым ротором.
Трехфазный асинхронный двигатель, схематично показанный на рис.1—это двухполюсный двигатель с короткозамкнутым ротором.
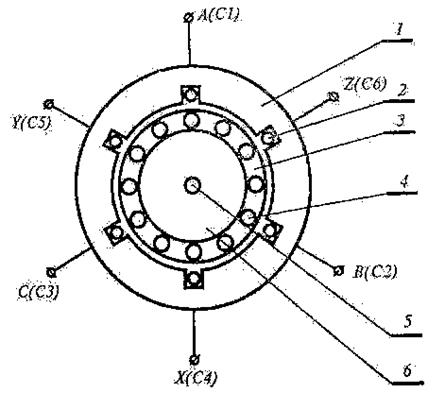
Рис.1. Конструктивная схема трёхфазного асинхронного двигателя с короткозамкнутым ротором: 1—сердечник статора; 2—обмотка статора; 3—короткозамыкающее кольцо обмотки ротора; 4—рабочие стержни работы ротора; 5—вал; 6—сердечник ротора
При подаче трехфазного напряжения на зажимы статорной обмотки в его магнитной системе, как уже отмечалось выше, возникает вращающееся магнитное поле с полюсами No - So, эквивалентное полю постоянного магнита.
Для рассмотрения принципа действия двигателя условно заменим вращающееся магнитное поле статора полем постоянного магнита, который будем вращать по часовой стрелке (рис. 2, а), а коротко- замкнутую обмотку ротора - одним короткозамкнутым витком (рис. 2, б), закрепленным на осях с возможностью вращения.
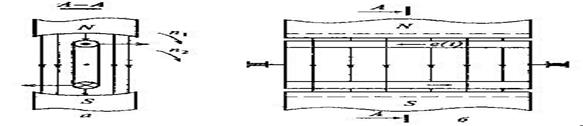
Рис. 2. Условное обозначение асинхронного двигателя для объяснения принципа действия: а - вид спереди; б - вид сбоку
В момент запуска двигателя, когда ротор (изображаемый короткозамкнутым витком) неподвижен, а внешнее магнитное поле начало вращаться, силовые линии этого поля пересекают обмотки ротора и наводят в ней ЭДС, направление которой можно определить, используя правило правой руки.
Напомним его: «Если правую руку расположить так, чтобы силовые линии входили в ладонь, а отогнутый большой палец показывал направление движения проводника относительно магнитного поля, то вытянутые четыре пальца покажут направление наведенной ЭДС».
Обратим внимание на то, что в данном случае относительно движущегося по часовой стрелке магнитного поля проводник (будучи пока неподвижным) как бы перемещается в противоположном направлении. Поэтому, согласно правилу правой руки, в верхней части витка ЭДС будет направлена к нам, а в нижней части нитка - от нас.
Так как ЭДС возникает в замкнутом витке, то под ее действием пойдет электрический ток, практический совпадающий по фазе с ЭДС.
Проводник же с током, находящийся в магнитном поле, будет из него выталкиваться в направлении, определенном правилом левой руки:
«Если расположить левую руку так, чтобы силовые линии входили в ладонь, а четыре вытянутых пальца показывали направление тока в проводнике, то отогнутый большой палец покажет направление выталкивающей силы, действующей на проводник».
Если применить это правило, то окажется, что верхний проводник выталкивается из поля вправо, а нижний — влево, т. е. электромагнитные силы, приложенные к неподвижному ротору, создают пусковой момент, стремящийся повернуть ротор в направлении движения магнитного поля.
Когда электромагнитный момент, действующий на неподвижный ротор, превышает тормозной момент на валу, ротор получает ускоренное движение в направлении вращения магнитного поля двигателя.
По мере возрастания частоты вращения п1 ротора относительная разность частот я1 - п2 сокращается, вследствие чего уменьшаются величины ЭДС и тока в проводниках ротора, что влечет за собой соответствующее уменьшение вращающего момента.
Процессы изменения ЭДС, тока, момента и частоты вращения ротора прекратятся, как только наступит устойчивое равновесие между электромагнитным моментом, вызывающим вращение ротора, и тормозным моментом (моментом сопротивления), создаваемым производственным механизмом, который приводится в движение электродвигателем. При этом ротор машины будет вращаться с постоянной частотой пь а в короткозамкнутых контурах его обмотки установятся токи, обеспечивающие создание вращающего момента, равного моменту тормозному.
Таким образом, принцип работы асинхронных двигателей основан на взаимодействии вращающегося магнитного поля статора с токами, которые наводятся этим полем в проводниках ротора. Очевидно, что возникновение токов в роторе и создание вращающегося момента возможны лишь при движении проводников ротора относительно магнитного поля машины, т. е. при наличии разности частот вращения магнитного поля статора п1и ротора п2 (п1- п2) должно быть больше 0.
Для примера определим, что же произойдет, если частота вращения ротора п2 сравнится с частотой вращения магнитного поля статора п1 (п1 = п2).
Магнитное поле статора и ротор будут в этом случае неподвижны относительно друг друга. Силовые линии магнитного поля статора не будут пересекать обмотку ротора, следовательно, в ней не будет наводиться ЭДС, не появится ток, не будет и выталкивающей силы.
Ротор несколько притормозится, но как только возникает разность частот вращения п1-п2, вновь в обмотке ротора наведется ЭДС, появится ток и начнут действовать выталкивающая сила и электромагнитный момент.
Таким образом, ротор вращаться с синхронной частотой пх в естественных условиях не может.
Отсюда следует важный вывод о том, что магнитное поле статора и ротор АД вращаются в пространстве в одном направлении, но с разной частотой: частота вращения ротора двигателя п2 всегда меньше частоты вращения п{ магнитного поля статора. С этим связано, кстати, и название машины: асинхронный двигатель.
При анализе работы асинхронных машин пользуются безразмерным параметром S, называемым скольжением и определяемым разностью частот вращения магнитного поля статора п1 и ротора п2 выраженной в относительных единицах (отнесенной к п1): S=(n1-n2)/n1.
Это выражение часто записывают следующим образом: п2 = п1(I- S).
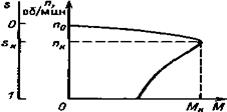
В соответствии с этим соотношением зависимость частоты вращения ротора п2 от скольжения при заданной п] графически выражается прямой, построенной в двух граничных режимах при запуске двигателя п2 = 0, т. е. скольжение S = 1, а при п2 =п1, (так называемый идеальный холостой ход) S=0 (рис.3). Следовательно, режим двигателя характеризуется скольжением, изменяющимся от 1 до 0.
Номинальное же скольжение Sн современных машин общепромышленного исполнения Sн = 1-3 %. Например, при п1 = 3000 об/мин и S = 1 % ротор будет вращаться с частотой, всего на 30 об/мин меньше, чем п1 (п2 = 2970 об/мин).
Рис.3 График зависимости частоты вращения ротора трехфазного асинхронного двигателя от скольжения
16. Пуск в ход трехфазных АД с фазным ротором.
Выше было показано, что условия работы асинхронного двигателя в режиме пуска значительно отличаются от условий его работы в нормальном режиме. В режиме пуска в обмотках ротора и статора проходят токи, значительно превышающие токи, протекающие в этих обмотках в номинальном режиме. Длительный ток приводит к перегреву обмоток двигателя и может вызвать сгорание обмоток и аварию двигателя.
Для того чтобы исключить такие явления, необходимо, с одной стороны, обеспечить ограничение пускового тока двигателя, а с другой стороны, по возможности уменьшить время его разгона. Время разгона двигателя от момента его включения до момента, когда ротор достигает номинальной частоты вращения, определяется ускорением ротора во время пуска(49)
| tпуск = | ωн | . |
| aср |
где ωн — номинальная угловая скорость двигателя, с-1; аср — среднее угловое ускорение во время пуска, с-2.
В свою очередь ускорение зависит от разности вращающего момента двигателя и момента сопротивления на его валу при постоянстве момента инерции:
(50)Jа = Мвр - Мс ,
где Мвр — вращающий момент двигателя, Н-м; Мс — статический момент сопротивления на валу двигателя, Н∙м; J — момент инерции всех вращающихся частей, кг∙м2; а — угловое ускорение ротора, с-2.
Пуск может быть успешно проведен, если в течение всего времени разгона Мвр > Мс .
Из выражения (50) следует также, что при заданной величине момента сопротивления ускорение будет тем больше, чем больше величина вращающего момента двигателя. Соответственно при увеличении вращающего момента двигателя в режиме пуска сократится время его разгона. Таким образом, второе требование, которое должно выполняться во время пуска асинхронного двигателя, заключается в создании достаточно большого вращающего момента в этом режиме.
Необходимо, кроме того, иметь в виду, что в тяжелых условиях пуска при недостаточно большом вращающем моменте разгон двигателя вообще невозможно осуществить. Это произойдет в том случае, если момент сопротивления на валу окажется большим, чем вращающий момент двигателя.
Рассмотрим теперь, каким образом выполняются эти два основных требования, предъявляемых к пусковому режиму асинхронного двигателя. Прежде всего отметим, что характеристики асинхронных двигателей в режиме пуска в большой степени зависят от его конструкции. В двигателях с фазным ротором имеются хорошие возможности для регулирования величины пускового тока и пускового момента введением сопротивлений в цепь ротора двигателя. Однако они являются более дорогими и сложными в эксплуатации. Более дешевые и надежные двигатели с короткозамкнутым ротором не позволяют осуществлять такого регулирования и их пусковые характеристики значительно хуже.
Наиболее часто применяются следующие способы пуска асинхронных двигателей:
прямое включение двигателей с короткозамкнутой обмоткой ротора;
включение двигателя с понижением напряжения, подаваемого на обмотку статора;
пуск в ход с введением сопротивления в фазную обмотку ротора.
Прямое включение асинхронного двигателя в сеть является наиболее простым способом пуска двигателя. В то же время в этом случае обмотки статора и ротора двигателя обтекаются большим пусковым током (током короткого замыкания), равным 4—7-кратному значению номинального. Поэтому очень важно, чтобы время пуска двигателя было при этом как можно меньшим.
Из всех способов пуска асинхронных двигателей с короткозамкнутой обмоткой ротора при данном способе пуска создается наибольший вращающий момент. Пусковой вращающий момент двигателя определяется при этом по формуле (48). Поскольку он все же относительно невелик, данный способ пуска применяется для приводов со средними и легкими условиями пуска. Отметим, что в настоящее время все большее распространение получают двигатели
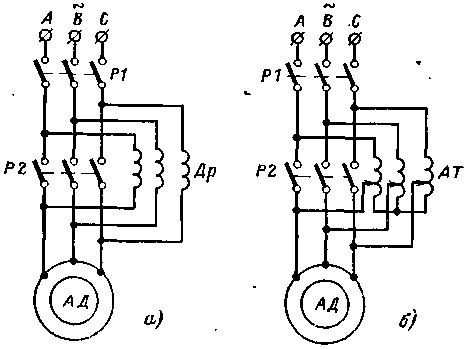
| Рис. 22. Схемы пуска асинхронного двигателя. а — при последовательном включении индуктивного сопротивления Др; б — при включении двигателя через автотрансформатор АТ. |
с глубоким пазом, которые имеют улучшенные пусковые характеристики. Обладая всеми преимуществами двигателей с короткозамкнутым ротором, они развивают больший пусковой момент при меньшем пусковом токе по сравнению с двигателями обычного исполнения. Это позволяет применять такие двигатели для приводов с более тяжелыми условиями пуска, т. е. со значительными статическими моментами при малых частотах вращения ротора. Необходимо также иметь в виду, что большой ток, потребляемый двигателем, проходит не только по его обмоткам, но и по проводам сети и трансформатору. Поэтому в питающей сети создается падение напряжения, которое в случае пуска мощного двигателя может оказаться весьма значительным. В результате напряжение, подводимое к двигателю в этом режиме, сильно понизится и это вызовет Дополнительное снижение вращающего момента двигателя. Поэтому прямое включение при пуске мощных Двигателей допустимо при наличии достаточно мощной сети, выдерживающей прохождение больших токов без значительного падения напряжения. В современных мощных системах производится прямое включение на сеть двигателей с номинальной мощностью в несколько сотен киловатт.
|
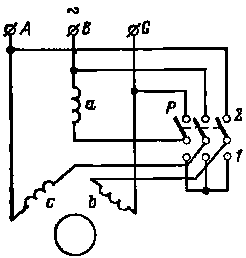
| Рис. 23. Схема пуска двигателя с переключением обмоток со звезды на треугольник. |
Включение двигателя при пониженном напряжении питающей сети позволяет уменьшить пусковой ток, потребляемый двигателем. Однако в этом случае снижается и вращающий момент, развиваемый двигателем при пуске, причем это уменьшение происходит пропорционально квадрату подводимого к двигателю напряжения. Такой способ применяется для приводов с легкими условиями пуска.
Практически понижение напряжения достигается включением индуктивного сопротивления последовательно с обмоткой статора двигателя (рис. 22,а) или включением двигателя через автотрансформатор (рис. 22,б). При пуске по схеме на рис. 22,а вначале замыкают рубильник Р1, а затем, когда ротор достигает достаточной частоты вращения, замыкают рубильник Р2, включая двигатель на полное напряжение сети. При пуске с помощью автотрансформатора (рис. 22,б) вначале замыкается рубильник Р1, а затем рубильник Р2. Применение автотрансформатора позволяет ограничивать пусковой ток в питающей сети при меньшем снижении напряжения питающего двигатель, чем в случае включения индуктивного сопротивления. Следовательно, при этом в меньшей степени понижается пусковой момент двигателя.
К способам пуска с понижением напряжения можно отнести также пуск с переключением обмоток статора со звезды на треугольник (рис. 23). В режиме пуска переключатель Р находится в положении 1, причем обмотка статора включена по схеме звезды. После того как ротор достигает установившейся частоты вращения, переключатель необходимо перевести в положение 2 и обмотки статора будут включены по схеме треугольника.
|
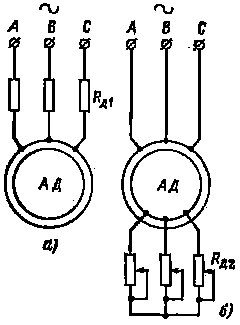
| Рис. 24. Схемы асинхронных двигателей с введением сопротивлений-резисторов в цепь статора (а) и в цепь ротора (б). |
При данном способе пуска фактически понижается величина напряжения, подводимого к каждой фазе двигателя, поскольку при одинаковом напряжении в линии напряжение на фазу в схеме звезды в √3 раз меньше, чем в схеме треугольника. Пусковой ток в сети при соединении обмотки статора звездой понижается в 3 раза по сравнению с соединением статора треугольником. Однако в 3 раза понижается также пусковой момент.
Для приводов с наиболее тяжелыми условиями пуска следует использовать двигатели с фазной обмоткой ротора. Введение сопротивления в цепь роторапозволяет, с одной стороны.ограничить пусковой ток двигателя, а с другой стороны — повысить пусковой момент. Схема включения сопротивлений (резисторов) в цепь ротора двигателя изображена на рис. 24,б.
Подставляя sмакс = 1 в формулу (45), можно найти величину дополнительного сопротивления в цепи ротора, при котором пусковой момент для данной характеристики оказывается равным максимальному моменту,
(51) r'д = x1 - r'2 + х'2.
Последовательно изменяя по мере увеличения частоты вращения двигателя сопротивление в цепи ротора, можно добиться того, чтобы весь процесс пуска проходил при вращающем моменте, близком к максимальному. Это позволяет получить возможно меньшее время пуска двигателя.
17. Тормозные режимы работы асинхронного двигателя.
 18. Рабочие характеристики трехфазного асинхронного двигателя.
18. Рабочие характеристики трехфазного асинхронного двигателя.
|
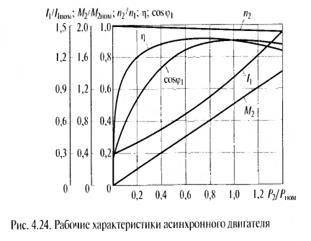
Зависимости скольжения S, момента на валу M2, тока статора I1,КПД η и cos ф от полезной мощности Р2, , выявляющие, как изменяются технические показатели двигателя в функции нагрузки, называют рабочими характеристиками. Их можно определить экспериментально или путем расчета по схеме замещения либо по круговой диаграмме.
Зависимость η= f(P2). Эта зависимость имеет такой же характер, как и для трансформатора. При изменении нагрузки электрической машины отдельные виды потерь изменяются по-разному . Все виды потерь можно разделить на две группы: постоянные потери и переменные.
Зависимость S = f(P2). При переходе от режима холостого хода к режиму полной нагрузки скольжение S изменяется незначительно.
Зависимость cos ф= f(P2)Коэффициент мощности (cosф) представляет собой отношение активной мощности (Р) к полной мощности (S).
Зависимость М2= f(P2). Эта зависимость определяется соотношение Р2=М2ω. Поскольку при изменении нагрузки в пределах от холостого хода до номинальной частота вращения асинхронных двигателей изменяется мало, то зависимость М2= f(P2) асинхронного двигателя близка к линейной.
Зависимость I1 = f(P2). Активная составляющая тока пропорциональна полезной мощности. Реактивная составляющая в диапазоне рабочих нагрузок изменяется мало, так как она определяется главным образом током холостого хода
18. Рабочие характеристики трехфазного асинхронного двигателя.
На рис. 3.21 представлены рабочие характеристики асинхронного двигателя.
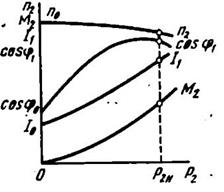
Рис. 3.17. Рабочие характеристики трехфазного асинхронного двигателя
Характеристика двигателя n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Объясняется это тем, что даже при номинальной нагрузке скольжение обычно не превышает  .
.
Работа двигателя при небольшом скольжении весьма экономична, так как электрические потери в роторе пропорциональны скольжению [см. (8.40)].
Полезная мощность двигателя:
 (3.73)
(3.73)
где  – угловая скорость ротора; М2 – полезный момент на валу двигателя, Нм.
– угловая скорость ротора; М2 – полезный момент на валу двигателя, Нм.
Зависимость М2 = f(P2) криволинейна, так как сростом нагрузки Р2, частота вращения n2, несколько уменьшается.
Зависимость тока I1 = f(P2) представляет собой характеристику, близкую к прямой. Это свидетельствует о том, что с возрастанием нагрузки ток I1увеличивается практически пропорционально полезной мощности. Эта зависимость выходит не из начала координат, так как двигатель в режиме холостого хода (P2 = 0) потребляет из сети ток холостого хода I0, величина которого у асинхронных двигателей больше, чем у трансформаторов. Последнее объясняется наличием механических потерь и воздушного зазора на пути магнитного потока двигателя. Ток холостого хода в асинхронных двигателях может достигать  от номинального тока I1ном. В некоторых специальных двигателях малой мощности он может достигать и больших значений.
от номинального тока I1ном. В некоторых специальных двигателях малой мощности он может достигать и больших значений.
Зависимость  показывает: при малых нагрузках
показывает: при малых нагрузках  имеет низкие значения
имеет низкие значения  . С увеличением нагрузки коэффициент мощности увеличивается, достигая максимума
. С увеличением нагрузки коэффициент мощности увеличивается, достигая максимума  при нагрузке, близкой к номинальной. Последнее объясняется тем, что при любой нагрузке двигателя, включая режим холостого хода, двигатель потребляет из сети намагничивающий (реактивный) ток приблизительно одинаковой величины. Поэтому в режиме холостого хода и при небольших нагрузках потребляемый из сети ток I1 имеет значительную реактивную составляющую, что и является причиной низкого значения . С возрастанием на грузки увеличивается активная составляющая тока I1 коэффициент мощности повышается.
при нагрузке, близкой к номинальной. Последнее объясняется тем, что при любой нагрузке двигателя, включая режим холостого хода, двигатель потребляет из сети намагничивающий (реактивный) ток приблизительно одинаковой величины. Поэтому в режиме холостого хода и при небольших нагрузках потребляемый из сети ток I1 имеет значительную реактивную составляющую, что и является причиной низкого значения . С возрастанием на грузки увеличивается активная составляющая тока I1 коэффициент мощности повышается.
При перегрузках, соответствующих малым частотам вращения (большому скольжению), уменьшается, что объясняется увеличением индуктивного сопротивления обмотки ротора  при возрастании скольжения.
при возрастании скольжения.
У трехфазных двигателей малой мощности (от 50 до 600 Вт) номинальное значение коэффициента мощности составляет  .
.
19. Пуск однофазного АД и его характеристики.
|
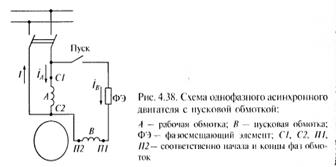
Для создания начального пускового момента Mн необходимо, чтобы в период пуска двигателя магнитное ноле статора было не пульсирующим, а вращающимся, как в трехфазном двигателе. Для получения вращающегося магнитного поля на статоре двигателя помимо основной рабочей обмотки А в оставшейся незаполненной 1/3 части пазов располагают вспомогательную пусковую обмотку В, ось которой обычно смещена относительно оси рабочей обмотки на 90 эл. град, (рис. 4.38). Кроме того, токи в обмотках iA и iв должны быть сдвинуты по фазе относительно друг друга во времени. Обе обмотки включают в одну сеть. Для получения необходимого сдвига токов но фазе в цепь пусковой обмотки (П1 — П2) вводят фазосмешиваюший элемент ФЭ: активное сопротивление, индуктивность или ёмкость. После того как частота вращения двигателя достигнет значения, близкого к номинальному, пусковую обмотку В отключают. Таким образом, на время пуска однофазный двигатель становится двухфазным.
20. Конструкция и принцип действия однофазного АД
Двигатели этого типа уступают по своим технико-экономическим показателям трехфазным и применяются в случаях, когда питание может быть осуществлено только от однофазной сети переменного тока.
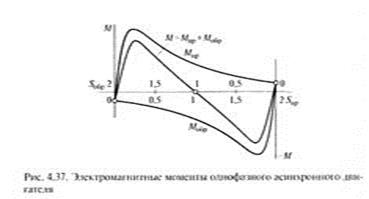
 По своему устройству однофазный двигатель состоит из статора, в 2/3 пазов которого уложена однофазная основная обмотка, и короткозамкнутого ротора. Заполнение обмоткой всех пазов статора неэффективно, поскольку прирост МДС и ЭДС незначителен по сравнению с увеличением расхода меди и электрических потерь в ней. Особенность работы однофазных асинхронных двигателей объясняется тем, что при включении однофазной обмотки статора СI— С2 в сеть (рис. 4.36) МДС статора создает не вращающийся, а пульсирующий магнитный поток(рис.4.37).
По своему устройству однофазный двигатель состоит из статора, в 2/3 пазов которого уложена однофазная основная обмотка, и короткозамкнутого ротора. Заполнение обмоткой всех пазов статора неэффективно, поскольку прирост МДС и ЭДС незначителен по сравнению с увеличением расхода меди и электрических потерь в ней. Особенность работы однофазных асинхронных двигателей объясняется тем, что при включении однофазной обмотки статора СI— С2 в сеть (рис. 4.36) МДС статора создает не вращающийся, а пульсирующий магнитный поток(рис.4.37).
Для создания начального пускового момента Mн необходимо, чтобы в период пуска двигателя магнитное ноле статора было не пульсирующим, а вращающимся, как в трехфазном двигателе. Для получения вращающегося магнитного поля на статоре двигателя помимо основной рабочей обмотки располагают вспомогательную пусковую обмотку
21. Уравнение механической характеристики трехфазного асинхронного двигателя в параметрической форме.
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АСИНХРОННОГО ДВИГАТЕЛЯМеханической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы.
n= f(М) или s = f(M).
Механическая характеристика является одной из важнейших характеристик двигателя. При выборе двигателя к производственному механизму из множества двигателей с различными механическими характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма.
Уравнение механической характеристики асинхронного двигателя может быть получено на основании формулы (10.41) и схемы замещения.
С помощью схемы замещения (см. рис. 10.17) определяют приведенный ток фазы ротора:
| I'2 = | U1ф | , | |
| √ | (r1 + | r'2 | ) + (x1 + x'2)2 |
| s |
где
| r'2 | = r'2 + | r'2(1 - s) | . |
| s | s |
Полученное значение тока I'2nподставляют в уравнение момента (10.41), в котором предварительно I2 и r2 заменяют через их приведенные значения:
(10.50)
| M = | 3I22r2 | = | 3I'22r'2 | . |
| ω0s | ω0s |
После подстановки получим
(10.51)
| M = | 3U1ф2r'2 | = | ||||
| ω0s [(r1 + | r' | )2+ (x1 + x'2)2] | ||||
| s | ||||||
| ||||||
| Рис. 10.18. Механическая характеристика асинхронного двигателя | ||||||
Выражение (10.51) представляет собой уравнение механической характеристики, поскольку оно связывает момент и скольжение двигателя. Остальные входящие в уравнение величины: напряжение сети и параметры двигателя — постоянны 1 и не зависят от s и М. Располагая параметрами двигателя, можно рассчитать и построить его механическую характеристику, которая будет иметь вид, изображенный на рис. 10.18.
1 Сопротивление r2 зависит от частоты f2 и, следовательно, от s, но для двигателей общего назначения изменение r2 незначительно.
Однако необходимо отметить, что после включения двигателя в нем происходят сложные переходные электромагнитные процессы. В тех случаях, когда время разбега оказывается соизмеримым с временем электромагнитных процессов, механическая характеристика двигателя в период разбега может существенно отличаться от статической.
Одной из важных точек характеристики, представляющей интерес при анализе работы и выборе двигателя, является точка, где момент, развиваемый двигателем, достигает наибольшего значения. Эта точка имеет координаты nкр, sкр , Mmax. Значение критического скольжения sкр , при котором двигатель развивает максимальный (критический) момент Мmax, легко определить, если взять производную dM/ds выражения (10.51) и приравнять ее нулю.
После дифференцирования и последующих преобразований выражение sкр будет иметь следующий вид:
(10.52)
| sкр= ± | r'2 | . |
| √r12+ xк2 |
где хк = x1 + х'2.
Подставив sкр вместо s в уравнение (10.51), получим выражение максимального момента
(10.53)
| Мmax = | 3U1ф2 | . |
| 2ω0(r1 ± √r12+ xк2) |
Необходимо отметить, что из выражений (10.51) — (10.53) вытекает следующее.
Момент, развиваемый двигателем, при любом скольжении пропорционален квадрату напряжения. Максимальный момент пропорционален квадрату напряжения и не зависит от сопротивления цепи ротора. Критическое скольжение пропорционально сопротивлению цепи ротора и не зависит от напряжения сети.
Полученные выражения удобны для анализа, однако из-за отсутствия в каталогах параметров r1, х1, х2их использование для расчетов и построения характеристик затруднено.
В практике обычно пользуются уравнением механической характеристики, с помощью которого можно произвести необходимые расчеты и построения, используя только каталожные данные.
Активное сопротивление обмотки статора r1значительно меньше остальных сопротивлений цепи статора и ротора, и им обычно пренебрегают. Тогда выражения (10.51) — (10.53) будут иметь вид
(10.54)
| M = | 3U1ф2r'2 | ; |
| ω0s [(r'2/s)2 + хк2] |
(10.55)
sкр = ±r'2/хк;
(10.56)
| Mmax= | 3U1ф2 | ; |
| 2ω0хк |
Упрощенное уравнение механической характеристики получается из совместного решения уравнений (10.54) — (10.56):
(10.57)
| M = | 2M max | ; |
| s/sк + sк/s |
Значение Мmaxопределяется из отношения Мmax/Мном = λ, указываемого в каталогах, a sкр — из уравнения (10.57), если решить его относительно sкр и вместо текущих значений s и М подставить их номинальные значения, которые легко определить по паспортным данным:
(10.58)
sкр = sном (λ ± √λ2 - 1),
где sном = (n0 - nном)/n0; λ = Мmax/Мном.
Следует отметить, что в зоне от М = 0 до М ≈ 0,9Мmax механическая характеристика близка к прямой линии. Поэтому, например, при расчетах пусковых и регулировочных резисторов эту часть механической характеристики принимают за прямую линию, проходящую через точки М = 0, n = n0 и Мном , nном . Уравнение механической характеристики в этой части будет иметь вид
| M = | Мном | s. |
| sном |
22. Нагрев и охлаждение электродвигателей.
При работе любого электродвигателя часть поступающей ктему энергии затрачивается на потери, связанные с нагревом обмоток и магнитопроводов, трением в подшипниках и вращающихся частей о воздух. Хотя потери энергии в современных электродвигателях невелики, при их работе все же выделяется значительное количество тепла, что приводит к нагреву электродвигателей. Различают постоянные и переменные потери в электрических машинах. Величина первых не зависит или мало зависит от нагрузки машины. К ним относятся потери на перемагничивание, на вихревые токи, на нагрев параллельных обмоток возбуждения и на трение (о воздух, в подшипниках, на щетках и т. п.). К переменным относят потери, пропорциональные квадрату тока нагрузки. Это потери на нагрев обмотки якоря или статора), последовательных обмоток возбуждения, коллектора и т. п. На холостом ходу нагрев машин определяется постоянными потерями. По мере загрузки машины увеличиваются переменные потери и нагрев ее повышается.
Таким образом, вопросы нагрева электродвигателей имеют большое практическое значение, так как нагревом должна определяться допустимая нагрузка электродвигателя. Температура неработающей машины равна температуре окружающего воздуха. Если машина приведена в рабочее состояние и нагрузка на ,нее постоянна, то в каждую единицу времени в ней начинают выделяться определенные порции тепла. В начальный момент работы все выделенное в машине тепло почти полностью идет на ее нагрев, при этом повышается температура машины, т. е. появляется температурный перепад τ между температурой машины и температурой окружающей среды. При появлении температурного перепада машина начинает часть выделяющегося в ней тепла отдавать окружающей среде путем конвекции, лучеиспускания и теплопроводности.
Чем выше перепад τ, тем больше тепла машина будет отдавать окружающей среде. Наконец, перепад достигает такого предельного значения τпр, когда все выделяемое в машине тепло станет отводиться в окружающую среду и нагрев машины прекратится, т. е. ее температура достигнет значения, предельного для данной нагрузки.
В случае, когда нагрузка на машину превышает допустимую, установившаяся температура может оказаться слишком высокой и превысит допустимую. Установившаяся температура работающей машины не должна превосходить величины, определяемой теплоемкостью ее изоляции.
При включении двигателя в сеть и наличии на его валу нагрузки происходит его нагрев, зависящий от тепловых потерь ΔР, времени нагрева t, теплоемкости С и теплоотдачи двигателя А. Эти величины связаны между собой уравнением теплового баланса электродвигателя:
ΔР·dt = C·dτ + A·τ·dt, Вт·с,
где τ - превышение температуры двигателя над температурой охлаждающей среды, которую принимают, как правило, равной +40°С.
Решение этого уравнения дает зависимость изменения превышения температуры двигателя во времени. Зависимость имеет экспоненциальный характер (см. рис.):
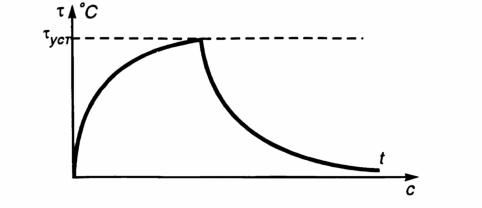
τ = τуст(1 - e-1/Тн) + τнач e-1/Тн,
где τуст - установившееся превышение температуры, °С; τнач - начальное превышение температуры, °С; ТН - постоянная времени нагревания, Тн = С·А, с.
23. Работа асинхронной машины с вращающимся ротором.
ЭДС и ток в обмотке ротора. Рассмотрим общий случай индуцирования ЭДС в обмотке ротора, увлекаемого вращающимся магнитным полем. Так как эта обмотка пересекается магнитным потоком с частотой пs = п1 - п2 , частота индуцируемой в ней ЭДС
(4.12)
f2 = pпs /60 = p(п1 — п2 )/60.
Учитывая, что pп1 /60 = f1 и (п1 - п2 )/п1 = s, представим (4.12) в ином виде:
(4.12a) f2 = f1s.
При вращении ротора ЭДС в его обмотке
(4.13) Е2s = 4,44f2 w2 kоб2 Фm = 4,44f1 sw2 kоб2 Фm.
Учитывая, что ЭДС при заторможенном роторе Е2 = 4,44f1 w2 kоб2 Фm, получаем
(4.13a) Е2S = E2S .
Если обмотка ротора замкнута, по ней проходит ток с частотой f2 , который создает бегущую волну МДС F2 ; вращающуюся относительно ротора с частотой
nF2 = 60f2 /р = 60f1 s/p = n1s = n1 - п2 .
Направление вращения МДС ротора определяется порядком чередования максимумов тока в фазах, т. е. МДС ротора вращается в ту же сторону, что и магнитное поле статора (см. § 3.4). Легко заметить, что частота вращения МДС ротора относительно статора равна сумме частот п2 + nF2 = п1.
Следовательно, при вращении ротора МДС cтamopa F1 и МДС ротора F2 вращаются в пространстве с одинаковой частотой, т. е. относительно друг друга они неподвижны. Таким образом, полученные выше для заторможенного ротора выводы о взаимодействии токов в первичной и вторичной обмотках применимы и для вращающегося ротора.
Энергетическая диаграмма. При работе асинхронной машины в двигательном режиме (рис. 4.12) к статору из сети подводится мощность
(4.14) P1 = m1 U1 I1 cos φ1 .
Часть этой мощности затрачивается на покрытие электрических потерь ΔРэл1 в активном сопротивлении обмотки статора и магнитных потерь ΔРм1 в статоре. В ротор посредством вращающегося магнитного поля передается электромагнитная мощность
(4.15) Рэм = P1 - ΔРэл1 - ΔРм1 .
Часть электромагнитной мощности, полученной ротором, тратится на покрытие электрических потерь ΔРэл2 в его обмотке. В машинах с фазным ротором возникают также потери в щеточных контактах на кольцах, которые обычно включают в потери ΔРэл2. Оставшаяся часть мощности Рэм превращается в механическую мощность
(4.16) Рмех = Рэм - ΔРэл2 .
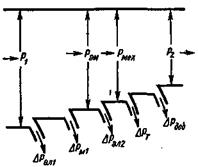 Рис. 4.12.Энергетическая диаграмма асинхронной машины
Рис. 4.12.Энергетическая диаграмма асинхронной машины
Электромагнитный момент. Формулу (4.21), полученную из энергетической диаграммы, преобразуем к более удобному для анализа виду, подставив в нее значения
(4.27) ω1 = 2πn1 /60 = 2π f1 /p;
(4.28) ΔРэл2 = m2 I2 E2s cosψ2 ,
где ψ2 —угол сдвига фаз между ЭДС и током ротора.
При этом с учетом (4.13) получаем
(4.29)М = (рт2 kоб2 /√2)Фm I2 cosψ2 = сM Фm I2 cosψ2,
где сM = рm2 kоб2 /√2 - постоянная.
Формула (4.29) справедлива не только для асинхронных машин, но и для электрических машин всех типов. Во всех этих машинах электромагнитный момент пропорционален произведению магнитного потока на активную составляющую тока ротора.
24. Асинхронные двигатели с улучшенными пусковыми свойствами (пояснить рисунками пазов и механическими характеристиками).
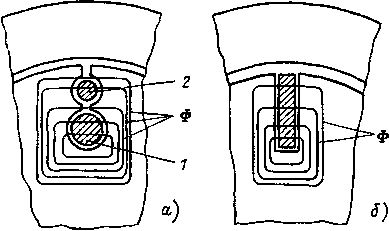
Для механизмов, имеющих тяжелые условия пуска, где по ряду причин желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения. Эти двигатели отличаются от двигателей нормального исполнения только устройством короткозамкнутой обмотки ротора. Одни из них снабжены двумя самостоятельными обмотками типа «беличьей клетки» (рис. 10.24, а), другие имеют более глубокие пазы ротора (рис. 10.24, б), в которые укладывается короткозамкнутая обмотка, имеющая в отличие от обычной стержни с большим отношением высоты к ширине, третьи обладают повышенным сопротивлением стержней обмотки. Первые называются двигателями с двойной «беличьей клеткой», вторые — с глубоким пазом, третьи — с повышенным скольжением. Рассмотрим процессы, происходящие при пуске двигателя с двойной «беличьей клеткой».
|
| Рис. 10.24 Двигатель с улучшенными пусковыми свойствами: с двойной «беличьей клеткой» (а), с глубоким пазом (б) |
Обмотка 1 (рис. 10.24, а) имеет меньшее активное сопротивление по сравнению с обмоткой 2, так как она большего диаметра и выполнена из материала с меньшим удельным сопротивлением (медь), чем вторая (латунь). Стержни обмотки1 расположены в толще ферромагнитного сердечника ротора, стержни обмотки 2 —ближе к воздушному зазору. В результате этого при пуске магнитное поле, образованное токами обмоток, располагается примерно так, как показано на рис. 10.24.
Из рисунка следует, что магнитный поток, сцепленный с обмоткой 1, больше, чем магнитный поток, сцепленный с обмоткой 2, следовательно, индуктивность первой обмотки будет также больше.
В первый момент пуска (s = 1) индуктивное сопротивление обмоток будет иметь наибольшее значение, так как
xs = 2πf2L= 2πf1sL = 2πf1L,
и токораспределение между обмотками будет определяться главным образом их индуктивными сопротивлениями. Поскольку индуктивное сопротивление первой обмотки значительно больше, чем второй, ток в ней, как следует из закона Ома для роторной цепи (10.29), будет значительно меньше по сравнению с током второй обмотки. Таким образом, основной
момент будет возникать в результате действия тока второй обмотки, имеющей значительное активное сопротивление. По мере разгона двигателя уменьшаются частота тока ротора и индуктивные сопротивления обеих обмоток, что вызывает перераспределение тока в обмотках: в первой обмотке ток увеличивается, во второй уменьшается. После окончания разгона частота тока ротора становится настолько малой (0,5 — 5 Гц), что индуктивное сопротивление обмоток оказывается намного меньше их активного сопротивления, вследствие чего весь ток ротора практически будет располагаться в первой обмотке, активное сопротивление которой значительно меньше, чем второй. Таким образом, роль рабочей выполняет первая обмотка, роль пусковой — вторая. Получается картина, подобная пуску двигателя с контактными кольцами и введенным в цепь ротора добавочным сопротивлением.
Асинхронные короткозамкнутые двигатели с улучшенными пусковыми свойствами
|
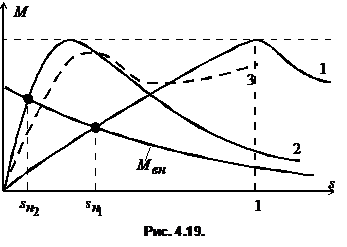
Многие электроприводы для достижения высокого быстродействия и надежности запуска требуют повышенного пускового момента, близкого к максимальному. Этой цели можно достичь, выполнив обмотку ротора с повышенным активным сопротивлением (кривая 1 рис. 4.19). Однако рабочая ветвь механической характеристики такого двигателя оказывается весьма «мягкой», поэтому в номинальном режиме двигатель будет работать с большим скольжением, что связано со значительными потерями и низкими энергетическими показателями. Для достижения высоких энергетических показателей желательно иметь «жесткую» механическую характеристику (кривая 2 рис. 4.19). Получить механическую характеристику, сочетающую положительные свойства характеристик 1 и 2, можно, если использовать поверхностный эффект в стержнях роторной обмотки для повышения активного сопротивления обмотки в начале пуска, когда частота тока в роторе  близка к частоте сети. По мере разгона двигателя частота тока в роторе падает, поверхностный эффект ослабляется и сопротивление ротора снижается. Вид механической характеристики такого двигателя представлен кривой 3 на рис. 4.19. Существует несколько конструктивных решений, обеспечивающих использование поверхностного эффекта.
близка к частоте сети. По мере разгона двигателя частота тока в роторе падает, поверхностный эффект ослабляется и сопротивление ротора снижается. Вид механической характеристики такого двигателя представлен кривой 3 на рис. 4.19. Существует несколько конструктивных решений, обеспечивающих использование поверхностного эффекта.
25. Конструкция асинхронной машины с короткозамкнутым и фазным ротором
Асинхронный двигатель с фазным ротором – это двигатель, который можно регулировать с помощью добавления в цепь ротора добавочных сопротивлений. Обычно такие двигатели применяются при пуске с нагрузкой на валу, так как увеличение сопротивления в цепи ротора, позволяет повысить пусковой момент и уменьшить пусковые токи. Этим асинхронный двигатель с фазным ротором выгодно отличается от АД с короткозамкнутым ротором.
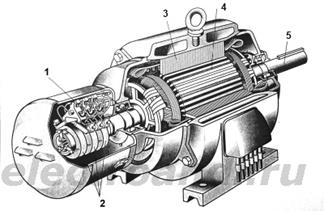
Статор (3) выполнен, так же как и в обычном асинхронном двигателе, он представляет из себя полый цилиндр, набранный из листов электротехнической стали, в который уложена трехфазная обмотка.
Ротор (4) по сравнению скороткозамкнутым, представляет из себя более сложную конструкцию. Он состоит из сердечника в который уложена трехфазная обмотка, аналогично обмотке статора. Отсюда название двигателя. Если двигатель двухполюсный, то обмотки ротора смещены геометрически друг относительно друга на 120. Эти обмотки соединяются с тремя контактными кольцами (2), расположенными на валу (5) ротора. Контактные кольца выполнены из латуни или стали, причем друг от друга они изолированы. С помощью нескольких металлографитовых щеток (обычно двух), которые расположены на щеткодержателе (1) и прижимаются пружинами к кольцам, в цепь вводятся добавочные сопротивления. Выводы обмоток соединяются по схеме "звезда".
Добавочное сопротивление вводится только при пуске двигателя. Причем им обычно служит ступенчатый реостат, сопротивление которого уменьшают с увеличением оборотов двигателя. Таким образом пуск двигателя осуществляется тоже ступенчато. После того, как разгон закончился и двигатель вышел на естественную механическую характеристику, обмотку ротора закорачивают. Для того, чтобы сохранить щетки и снизить потери на них, в двигателях с фазным ротором существует специальное устройство, которое поднимает щетки и замыкает кольца. Таким образом, удается повысить еще и КПД двигателя.
Добавочное сопротивление позволяет главным образом осуществить пуск двигателя под нагрузкой, работать с ним длительное время двигатель не может, так как механические характеристики слишком мягкие и работа двигателя на них нестабильна.
Для того чтобы автоматизировать пуск двигателя, в обмотку ротора включают индуктивность. В момент пуска, частота тока в роторе наибольшая, а значит и индуктивное сопротивление максимально. Затем, при разгоне двигателя, частота, как и сопротивление уменьшаются, и двигатель постепенно начинает работать в обычном режиме.
За счет усложнения своей конструкции, асинхронный двигатель с фазным ротором, обладает хорошими пусковыми и регулировочными характеристиками. Но по той же причине, его стоимость возрастает приблизительно в 1.5 по сравнению с обычным АД, кроме того увеличивается масса, размеры и как правило, уменьшается надежность двигателя.
Асинхронный электродвигатель с короткозамкнутым ротором
Короткозамкнутая обмотка ротора состоит из стержней 3, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами 4. Такая обмотка напоминает “беличье колесо” и называют её типа “беличьей клетки” (рис. 1, позиция а).
Электродвигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие электродвигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов.
1 – станина, 2 – сердечник статора, 3 – обмотка статора, 4 – сердечник ротора с короткозамкнутой обмоткой, 5 – вал.
Доливо-Добровольский выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. Он также назвал причину этого недостатка – сильно закороченный ротор.
Достоинства асинхронного электродвигателя с короткозамкнутым ротором
приблизительно постоянная скорость при разных нагрузках;
возможность кратковременных механических перегрузок;
простота конструкции;
простота пуска и легкость его автоматизации;
более высокие cos φ и КПД, чем у электродвигателей с фазным ротором.
Недостатки асинхронного электродвигателя с короткозамкнутым ротором:
затруднения в регулировании скорости вращения;
большой пусковой ток;
низкий cos φ при недогрузках.
26. Способы регулирования частоты вращения асинхронного двигателя
Частота вращения асинхронного двигателя
n = n1 (1 – s) = (60f1/p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Рис1. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
Регулирование путем изменения частоты питающего напряжения. Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 1), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 1, а) число полюсов равно четырем, при встречном включении (рис. 1, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 2).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
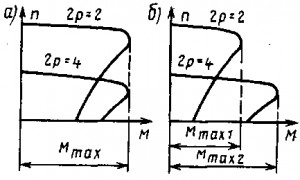
Рис.2. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 3) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
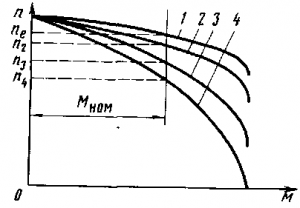
Рис.3. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 4, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 4,б). Такое переключение можно осуществить обычным переключателем.
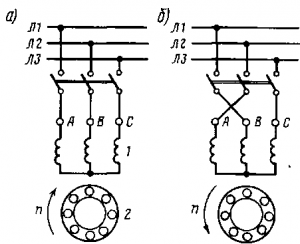
Рис.4. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
27. Динамическое торможение асинхронного двигателя.
В современном асинхронном электродвигателе для осуществления динамического торможения двигатель отключается от сети переменного тока и включается по схеме рис.1:
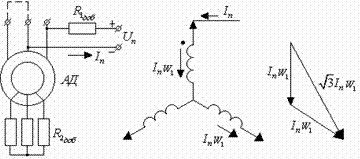
a) б) в) Рис. 1. К анализу режима динамического торможения.
Так как постоянный ток не зависит от тока ротора в статике, а при достаточно большом  и в динамике, то режим динамического торможения двигателя является частным случаем питания машины от источника тока при
и в динамике, то режим динамического торможения двигателя является частным случаем питания машины от источника тока при  и
и  (механическая характеристика рис.1а, пересекающая начало системы координат).
(механическая характеристика рис.1а, пересекающая начало системы координат).
Установим связь между током Iп и трёхфазным током I1, для которого было получено выражение механической характеристики. Условием эквивалентности является равенство МДС, создаваемых постоянным током Iп при данной схеме соединений и переменным током I1.
Из теории электрических машин согласно принципу образования кругового вращающегося магнитного поля в трёхфазной системе результирующая величина магнитной индукции в асинхронной машине определяется МДС, определяемой выражением  .
.
Поэтому можно написать (рис. 1. б и в):
 .
.
Отсюда:
Подставим равенства  в выражения для
в выражения для  и
и 

Статическая жёсткость механической характеристики:

Так как наклон механической характеристики с введением добавочных резисторов в цепь ротора увеличивается, то, в соответствии с выражением для жёсткости, её значение уменьшается.
Преимущества режима динамического торможения:
- Относительная простота осуществления способа;
- Возможность торможения до полной остановки вала ротора;
- Высокая эффективность торможения, особенно при использовании комбинированного метода.
Основным недостатком является необходимость наличия источника постоянного тока.
28. Вращающееся магнитное поле асинхронной машины.
Пульсирующее поле. При питании однофазной обмотки переменным током возникает магнитное поле, пульсирующее во времени с частотой изменения тока. В этом случае при синусоидальном распределении МДС (рис. 3.12) в каждой точке воздушного зазора, расположенной на расстоянии х от оси обмотки, действует МДС
(3.12)Fx = F0 cos (πx/τ) = Fm sinωtcos (πx/τ),
где F0 = Fm sinωt - МДС в точке, расположенной на оси обмотки.
Выражение (3.14) можно преобразовать к виду
(3.13)Fx = 0,5Fm sin (ωt - πx/τ) + 0,5Fm sin (ωt + πx/τ).
Каждый из членов правой части (3.13) представляет собой уравнение бегущей (или вращающейся) волны МДС. Следовательно, пульсирующее магнитное поле, синусоидально распределенное в пространстве, можно представить в виде суммы двух магнитных полей, вращающихся в противоположных направлениях (рис. 3.13). При этом бегущие волны МДС, создающие эти магнитные поля,
(3.14)F'x = 0,5Fm sin (ωt - πx/τ); F''x = 0,5Fm sin (ωt + πx/τ).
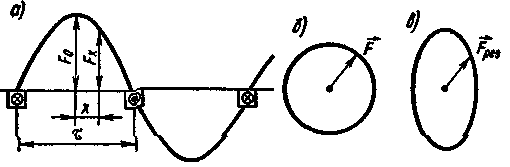
Рис. 3.12. Диаграмма распределения МДС в воздушном зазоре (а) и годографы пространственного вектора МДС (б, в)
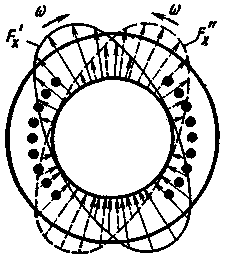
Рис. 3.13. Вращающиеся магнитные поля однофазной обмотки
В каждом из этих полей максимальные значения МДС в различные моменты времени остаются неизменными. Следовательно, если каждое из этих полей представить в виде пространственного вектора МДС F (рис. 3.12,6), то конец его будет описывать окружность. Такое поле называют круговым.
В качестве положительного направления условно примем направление вращения бегущей волны МДС по часовой стрелке. Координату точки х, в которой МДС F'x максимальна и равна 0,5Fm, можно получить, положив sin (ωt - πx/τ) = 1. При этом ωt - πx/τ = π/2, откуда
(3.15)х = τ(ωt - π/2)/π.
Следовательно, при увеличении угла ωt координата точки х перемещается в положительном направлении, т. е. МДС F'x вращается по часовой стрелке, a F''x — против часовой стрелки. Линейная скорость перемещения бегущей волны МДС
(3.16)u = dx/dt = ωτ/π = 2fτ
т. е. за один период магнитное поле проходит пару полюсов. Частота вращения бегущей волны МДС (частота вращения магнитного поля)
n1 = 60u/(πD) = 60• 2fτ/(πD) = 60f /p.
Следовательно, изменяя число полюсов электрической ма-шины 2р, можно получать различные частоты вращения магнитного поля.
Из (3.17) следует, что в многополюсной машине за один период изменения переменного тока магнитное поле поворачивается на пространственный угол 360°/р, соответствующий одной паре полюсов. Поэтому при рассмотрении электромагнитных процессов в электрических машинах вводят понятие «электрические градусы», с которыми оперируют при построении векторных диаграмм, проектировании обмоток и пр. При этом 360 временным градусам соответствует 360р электрических градуса, а электрические градусы имеют связь с геометрическими градусами в виде соотношения α°эл = рα°геом.
Круговое вращающееся поле при трехфазной обмотке. Если на статоре электрической машины расположить симметричную трехфазную обмотку (рис. 3.14), у которой оси фаз АХ, BY иCZ сдвинуты в пространстве на угол 120°, то при питании ее симметричным трехфазным током получим круговое вращающееся магнитное поле. На рис. 3.14 для простоты фазы обмотки показаны сосредоточенными, но распределение МДС, образуемое каждой фазой, следует считать синусоидальным.
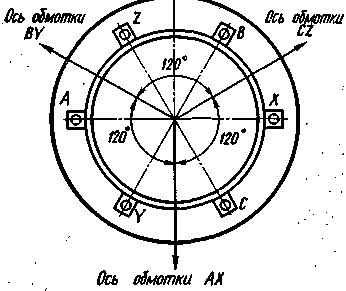
Рис. 3.14. Расположение обмоток фаз на статоре двухполюсной трехфазной машины
Ввиду того что в рассматриваемой обмотке фазы АХ, BY и CZ смещены в пространстве на (2/3) τ, а токи в них сдвинуты во времени на угол (2/3) π, получим следующие выражения для составляющих МДС в точке х от каждой из фаз:
| FxA = Fm sin ωt cos |
| = |
| sin (ωt - |
| ) + |
| sin (ωt + |
| ); |
| FxB = Fm sin (ωt - |
| ) cos ( |
| ) = |
| sin(ωt - |
| ) + |
| sin (ωt + |
| ); |
| FxC = Fm sin (ωt - |
| ) cos ( |
| ) = |
| sin(ωt - |
| ) + |
| (ωt + |
| + |
| ). |
Результирующую МДС в точке х можно получить путем сложения отдельных ее составляющихFxA, FxB, FxC. При этом обратновращающиеся волны МДС исчезают, а результирующая МДС
(3.18)Fxpeз = 1,5Fm sin (ωt - πx/τ).
Круговое вращающееся поле при двухфазной обмотке. В симметричной двухфазной обмотке фазы АХ и BY (рис. 3.15, а) сдвинуты в пространстве на половину полюсного деления τ. Если такую обмотку питать симметричным двухфазным током, при котором токи отдельных фазÍА и ÍВ (рис. 3.15,6) сдвинуты во времени на угол 90° (ÍВ = ± jÍА ) то возникает круговое вращающееся поле.
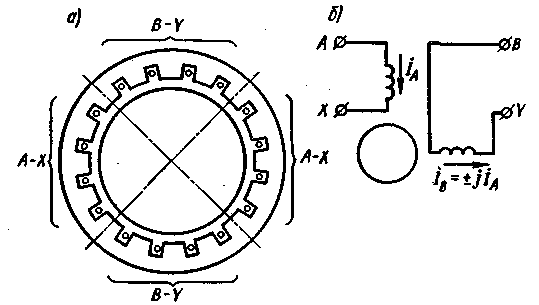
Рис. 3.15. Схема двухполюсной двухфазной машины и расположение на статоре обмоток ее фаз
Для составляющих МДС, образуемых этими токами, получим следующие выражения:
| FxA = Fm sin ωt cos |
| = |
| sin(ωt - |
| ) + |
| sin(ωt | + |
| ); |
| FxB = Fmsin(ωt - |
| )cos( |
| ) = |
| sin(ωt - |
| ) + |
| sin(ωt + |
| - π); |
При этом уравнение бегущей волны принимает вид
Fxpeз = FxA + FxB = Fm sin (ωt - πx/τ).
Частота вращения поля, образованного двухфазной обмоткой, определяется так же, как и поля, образованного трехфазной обмоткой, по формуле (3.17). Для изменения направления вращения поля следует изменить порядок чередования тока в фазах обмотки, т. е. переключить провода, присоединяющие фазы обмотки к сети. Общий случай кругового вращающегося поля. В общем случае, когда по симметричной m-фазной обмотке (фазы которой сдвинуты в пространстве на угол α = 2π/т) проходят переменные токи, сдвинутые во времени на угол 2π/т, уравнение бегущей волны МДС имеет вид
(3.19)Fxpeз = 0,5mFm sin (ωt - πx/τ).
Несимметричная m-фазная обмотка также может создать круговое вращающееся поле, если на ее фазы подать определенным образом подобранную m-фазную несимметричную систему токов. Однако на практике фазы многофазных обмоток обычно располагают симметрично, чтобы получить круговое поле при минимальных токах в фазах и электрических потерях в них.
Круговое вращающееся магнитное поле обладает следующими характерными свойствами:
а) максимумы результирующих волн МДС и индукции всегда совпадают с осью той фазы, в которой ток имеет максимум. Это положение легко проверить, задаваясь величиной ωt,соответствующей максимуму тока в фазе, и определяя по (3.15) координату точки х, в которой МДС F'x максимальна;
б) магнитное поле перемещается в сторону оси той фазы, в которой ожидается ближайший максимум. Это свойство непосредственно следует из предыдущего;
в) для изменения направления вращения поля необходимо изменить порядок чередования тока в фазах. В трехфазных машинах для этого следует поменять местами провода, подводящие ток из трехфазной сети к двум любым фазам обмотки. В двухфазных машинах нужно переключить провода, присоединяющие фазы обмотки к двухфазной сети.
29. Механические характеристики асинхронного двигателя в двигательном и тормозном режимах
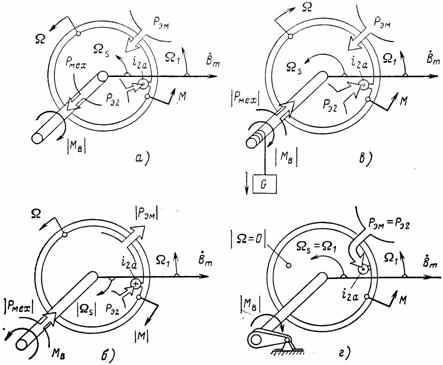
Режимы работы асинхронной машины.
а — двигательный;
б — генераторный;
в — тормоза;
г — трансформатора (или короткого замыкания).
2.2.1. Двигательный режим
Работа машины электродвигателем частично рассмотрена в подразд. 2.1. Разгону двигателя предшествует его пуск. При пуске трехфазная обмотка статора подключается к сети. Протекающий ток создает вращающееся магнитное поле, оно вращается с частотой n1, но ротор в силу инерционности небольшой момент времени остается неподвижным, n = 0, тогда при пуске
 . (2.2)
. (2.2)
По мере разгона частота вращения ротора n будет расти, а скольжение S уменьшаться. Скольжение, соответствующее номинальной нагрузке двигателя называют номинальным Sн. Для асинхронных двигателей общего назначения Sн = (1¸8) %, при этом для двигателей большой мощности
Sн = 1 %, а для двигателей малой мощности Sн = 8 %.
При помощи постороннего двигателя частота вращения ротора
машины может быть увеличена до скорости вращения магнитного поля, т. е. n = n1
При этом скольжение
 . (2.3)
. (2.3)
В этом случае ротор и поле будут взаимно неподвижны, а токи в роторе и электромагнитные силы исчезнут. Такой режим называют идеальным холостым ходом асинхронной машины.
2.2.2. Генераторный режим
Если обмотку статора включить в сеть, а ротор асинхронной машины посредством приводного двигателя вращать в направлении вращения магнитного поля статора с частотой n > n1. Так как ротор будет обгонять поле статора, то направление движения ротора относительно поля статора изменится на обратное, по сравнению с двигательным режимом. При этом скольжение станет отрицательным
 . (2.4)
. (2.4)
Эдс, наведённая в обмотке ротора, изменит свое направление. Токи и электромагнитный момент ротора изменят свое направление. Такой момент будет противодействовать вращению приводного двигателя. Таким образом, асинхронная машина, ротор которой вращается в направлении вращения магнитного поля с частотой, превышающей частоту поля, является генератором.
Скольжение асинхронной машины в генераторном режиме может изменяться в диапазоне 0 > S –¥, т. е. оно принимает любые отрицательные значения.
2.2.3. Режим электромагнитного тормоза
В режиме электромагнитного тормоза асинхронная машина работает тогда, когда её ротор и магнитное поле вращаются в разных направлениях. Например, машина работает в двигательном режиме. Если изменим порядок чередования фаз, подводимого к обмоткам статора напряжения, то вращающееся поле статора изменит направление вращения на обратное. При этом ротор асинхронной машины под действием сил инерции будет продолжать вращение в прежнем направлении, т.е. ротор и поле статора будут вращаться в противоположных направлениях. В этих условиях электромагнитный момент машины, направленный в сторону вращения поля статора, будет оказывать на ротор тормозящее действие.
В режиме электромагнитного торможения частота вращения ротора по отношению к частоте вращения поля статора является отрицательной; поэтому скольжение имеет положительное значение
 . (2.5)
. (2.5)
Скольжение асинхронной машины в режиме торможения противовключением может изменяться в диапазоне 1 < S < +¥, т. е. принимать любые положительные значения больше единицы.
Режим работы асинхронной машины и зависимость скольжения от частоты вращения ротора иллюстрируется на рис. 2.1.
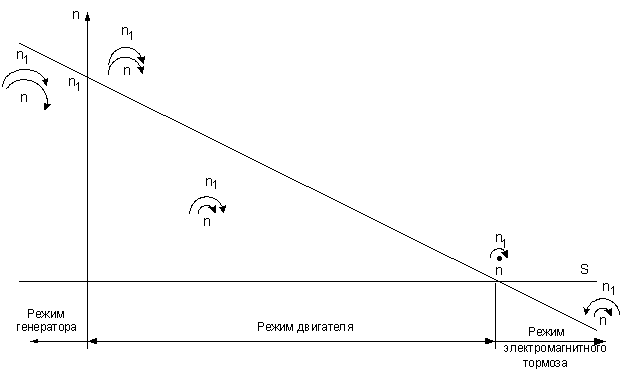 Рис. 2.1. Режимы работы асинхронной машины
Рис. 2.1. Режимы работы асинхронной машины
2.3. Линейная скорость вращающегося магнитного поля
Частота вращения магнитного поля статора n1 (синхронная частота вращения n0) в несистемной единице измерения
 , (2.6)
, (2.6)
где f1 – частота переменного тока питающей сети; p – число пар полюсов.
Перемещение магнитного поля происходит по внутренней поверхности статора, диаметр которого Da, тогда линейная скорость перемещения магнитного поля следующее

 (2.7)
(2.7)
а в секунду
 . (2.8)
. (2.8)
Линейная скорость ротора незначительно отличается от линейной скорости магинтного поля статора. Это позволяет сравнивать ее с допустимой скоростью вращения, так как она определяет механическое крепление обмотки в пазах вращающегося ротора.
30. Схема замещения асинхронной машины, векторная диаграмма, параметры схемы замещения
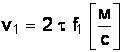
Схема замещения позволяет определить токи, потери мощности и падения напряжения в асинхронной машине. При этом нужно учитывать, что в обмотке вращающегося ротора проходит ток, действующее значение и частота которого зависят от частоты вращения. Из электрической схемы замещения ротора при его вращении (рис. 4.14, а) следует, что ток ротора
(4.30)I2 = E2s /Z2 = E2s /√R22 + X22s.
При вращении ротора [см. (4.13а) и (4.12a)] ЭДС E2s в обмотке ротора и ее частота пропорциональны скольжению s. Следовательно, и индуктивное сопротивление обмотки ротора зависит от скольжения:
(4.31)Х2s = 2πf2 L2 = 2πf1 L2 s = X2 s ,
где Х2 — индуктивное сопротивление обмотки заторможенного ротора.
| Рис. 4.14. Схемы замещения ротора асинхронной машины |
Подставляя значения Е2s и Х2s в (4.30), получаем
(4.32a)I2 = sE2 /√R22 + (sX2)2 .
В числителе и знаменателе (4.32а) есть переменная величина s, поэтому преобразуем его к виду
(4.32б)I2 = E2 /√(R2 /s)2 + X22 .
Уравнению (4.326) соответствует электрическая схема замещения, показанная на рис. 4.14,6. Здесь ЭДС Е2 и индуктивное сопротивление Х2 неизменны, а активное сопротивление R2/s изменяется в зависимости от скольжения.
Схемы, представленные на рис. 4.14, а и б, с энергетической точки зрения не эквивалентны. Так, в схеме, приведенной на рис. 4.14, а, электрическая мощность ротора Рр равна электрическим потерям
(4.33a)Рр = ΔРэл2 = m2 I22 R2 ,
а мощность, потребляемая в схеме, приведенной на рис. 4.14,6,
(4.33б)Р'р = m2 I22 R2 /s.
Отношение этих мощностей
Рр /Р'р = ΔРэл2 /Р'р = m2 I22 R2 /(m2 I22 R2 /s ) = s .
Однако, поскольку s = ΔРэл2 /Рэм, получим, что Р'р = Рэм . Следовательно, электрическая мощность Р'р в схеме, представленной на рис. 4.14,6, равна всей электромагнитной мощности, подводимой от статора к ротору.
По известным величинам ΔРэл2 и Рэм можно определить и механическую мощность ротора:
(4.34)Рмех = Рэм - ΔРэл2 = m2 I22 R2 /s - m2 I22 R2 = m2 I22 R2 (1 - s)/s.
Полученный результат наглядно представлен электрической схемой (рис. 4.14, в), в которой активное сопротивление обмотки ротора состоит из двух частей: R2 и R2(1 - s)/s. Первое сопротивление не зависит от режима работы, и потери в нем равны электрическим потерям реального ротора. Второе сопротивление зависит от скольжения, и мощность, выделяющаяся в нем, численно равна механической мощности двигателя. Таким образом, рассматриваемая схема замещения позволяет заменить реальный вращающийся ротор неподвижным, в цепь обмотки которого включено активное сопротивление, зависящее от частоты вращения ротора.
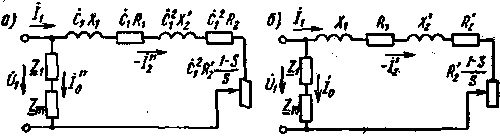
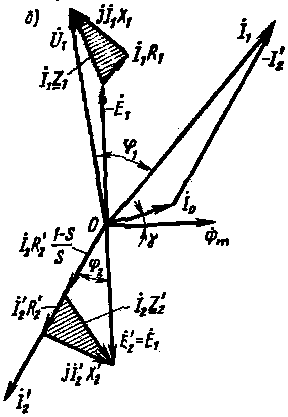
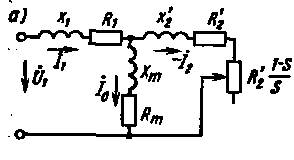
Полная схема замещения асинхронной машины при вращающемся роторе отличается от схемы замещения асинхронной машины с заторможенным ротором только наличием в цепи ротора активного сопротивления, зависящего от нагрузки (рис. 4.15, а). Эту схему замещения называют Т-образной. Следовательно, и в этом случае удается свести теорию асинхронной машины к теории трансформатора. Векторная диаграмма для Т-образной схемы замещения приведена на рис. 4.15,6.
Сопротивления Rm и Хт намагничивающего контура значительно меньше соответствующих значений для схемы замещения трансформатора, так как ток холостого хода асинхронного двигателя гораздо больше, чем у трансформатора. Если при рассмотрении работы трансформатора часто можно Пренебречь намагничивающим контуром, то при рассмотрении работы асинхронного двигателя этого сделать нельзя, так как ошибка может получиться значительной.
Можно упростить вычисления, преобразовав Т-образную схему замещения в Г-образную, как это показано на рис. 4.16, а. Подобные преобразования изучаются в курсе ТОЭ, поэтому математические выкладки здесь не приводятся.
Для Г-образной схемы замещения (рис. 4.16, а) имеем
Í1 = Í'0 + ( -Í''2 ); Í''2 = Í'2 /Ć1 ,
где Í'2 и Í''2 - токи рабочих контуров для Т-образной и Г-образной схем замещения.
| Рис. 4.16. Схемы замещения асинхронной машины |
| 
|
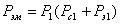
Появившийся в этой схеме замещения комплекс Ć1 == 1 + (R1 + jX1)/(Rm + jXm) практически всегда можно заменить модулем С1, который для асинхронных двигателей мощностью 10 кВт и выше равен 1,02 - 1,05. При анализе электромагнитных процессов в машинах общего применения часто полагают C1 ≈ 1, что существенно облегчает расчеты и мало влияет, на точность полученных результатов. Г-образную схему замещения при C1 = 1 называют упрощенной схемой замещениям вынесенным намагничивающим контуром (рис. 4.16,6). В этой схеме ток I''0 без большой погрешности можно приравнять току I0.
Параметры схемы замещения.
механическая мощность
линейное или фазное напряжение питания
линейный или фазный ток
скорость вращенияили скольжение
номинальный момент нагрузки
коэффициент мощности
коэффициент полезного действия
кратность максимального момента
кратность пускового момента
кратность пускового тока
31. Потери и КПД в асинхронной машине.
В обмотку статора из сети поступает мощность P1. Часть этой мощности идет на потери в стали Pсl, а также потери в обмотке статора Рэ1:
 Оставшаяся мощность посредством магнитного потока передается на ротор и называется электромагнитной мощностью:
Оставшаяся мощность посредством магнитного потока передается на ротор и называется электромагнитной мощностью:
 Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора:
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора:
 Оставшаяся мощность преобразуется в механическую, получившую название полной механической мощности:
Оставшаяся мощность преобразуется в механическую, получившую название полной механической мощности:
Р2‘ = Рэм - Рэ2
Воспользовавшись ранее полученной формулой
 запишем выражение полной механической мощности:
запишем выражение полной механической мощности:
 тогда
тогда
 Рэ2 = SРэм,
Рэ2 = SРэм,
то есть мощность электрических потерь пропорциональна скольжению.
Мощность на валу асинхронного двигателя P2 меньше полной механической мощности Р2’ на величину механических Рмех и добавочных Рдобпотерь:
Р2 = Р2’ — (Рмех + Рдоб)
Таким образом:
Р2 = Р1 - SP,
где SP = Pсl + Рэ1 + Рэ2 + Рмех + Рдоб.
КПД асинхронного двигателя
Коэффициент полезного действия асинхронного двигателя есть отношение мощности на валу P2 к потребляемой мощности P1:
Потери энергии и КПД асинхронных двигателей
В электрическом двигателе при преобразовании одного вида энергии в другой часть энергии теряется в виде теплоты, рассеиваемой в различных частях двигателя. В электрических двигателях имеются потери энергии трех видов: потери в обмотках, потери в стали и механические потери. Кроме того, имеются незначительные добавочные потери.
Потери энергии в асинхронном двигателе рассмотрим при помощи его энергетической диаграммы (рис. 1). На диаграмме Р1 - мощность, подводимая к статору двигателя из сети. Основная часть Рэм этой мощности, за вычетом потерь в статоре, передается электромагнитным путем на ротор через зазор. Рэм называется электромагнитной мощностью.
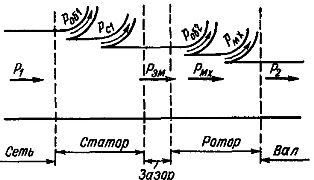
Рис. 1. Энергетическая диаграмма двигателя
Потери мощности в статоре складываются из потерь мощности в его обмотке Pоб1 = m1 х r1 х I12 и потерь в стали Pс1. Мощность Pс1 является потерями на вихревые токи и на перемагничивание сердечника статора.
Потери в стали имеются и в сердечнике ротора асинхронного двигателя, но они невелики и могут не приниматься во внимание.
Это объясняется тем, что скорость вращения магнитного потока относительно статора n0 во много раз больше скорости вращения магнитного потока относительно ротора n0 - n, если скорость вращения ротора асинхронного двигателя n соответствует устойчивой части естественной механической характеристики.
Механическая мощность асинхронного двигателя Рмх, развиваемая на валу ротора, меньше электромагнитной мощности Рэм на значение мощности Pоб2 потерь в обмотке ротора:
Рмх = Рэм - Pоб2энергия двигатель мощность потеря
Мощность на валу двигателя:
Р2 = Рмх - pмх,
где pмх - мощность механических потерь, равная сумме потерь на трение в подшипниках, на трение вращающихся частей о воздух (вентиляционные потери) и на трение щеток о кольца (для двигателей с фазным ротором).
Электромагнитная и механическая мощности равны
Рэм = ω0M, Рмх = ωM,
где ω0 и ω - синхронная скорость и скорость вращения ротора двигателя; М - момент, развиваемый двигателем, т. е. момент, с которым вращающееся магнитное поле действует на ротор.
Из этих выражений следует, что мощность потерь в обмотке ротора:
Pоб2 = s х Pэм
В случаях, когда известно активное сопротивление г 2 фазы обмотки ротора, потери в этой обмотке могут быть найдены также из выражения
Pоб2 = m2х r2х I22.
В асинхронных электродвигателях имеются также добавочные потери, обусловленные зубчатостью ротора и статора, вихревыми токами в различных конструктивных узлах двигателя и другими причинами. При полной нагрузке двигателя потери Pд принимаются равными 0,5% его номинальной мощности.
Коэффициент полезного действия (КПД) асинхронного двигателя:
η = P2 / P1 = (P1 - (Pоб - Pс - Pмх - Pд)) / P1
где Роб =Pоб1 + Роб2 - суммарная мощность потерь в обмотках статора и ротора асинхронного двигателя.
Поскольку общие потери зависят от нагрузки, то и КПД асинхронного двигателя является функцией нагрузки.
На рис. 2, а дана кривая η = f(Р/Рном), где Р/Рном - относительная мощность.
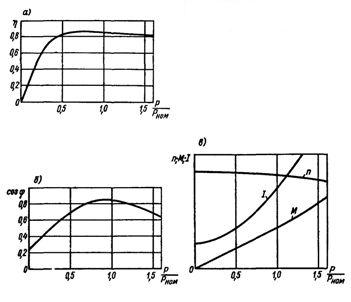
Рис. 2. Рабочие характеристики асинхронного двигателя
Асинхронный электродвигатель конструируется так, чтобы максимум ее коэффициента полезного действия ηmax имел место при нагрузке, несколько меньшей номинальной. КПД двигателя достаточно высок и в широком диапазоне нагрузок (рис. 2, а). Для большинства современных асинхронных двигателей КПД имеет значение 80 - 90%, а для мощных двигателей 90-96%.
32. Расчет и построение механической характеристики асинхронного двигателя.
Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валуn = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M). Если учесть взаимосвязь s = (n1 - n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
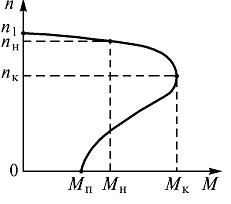
Рис. 1. Механическая характеристика асинхронного двигателя
Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристики получаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики.
Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
Для оценки свойств асинхронного двигателя прибегают кпостроению механической характеристики.
Механическая характеристика асинхронного двигателя выражает зависимость между электромагнитным моментом и частотой вращения, либо скольжением. Скольжение – это величина, которая показывает, насколько частота вращения магнитного поля опережает частоту вращения ротора.
Благодаря механической характеристике, появляется возможность определить к какому типу установки больше подходит двигатель, на каком участке сохраняется его устойчивая работа, перегрузочную способность и другое.
Последовательность расчёта:
Для построения необходимо произвести расчет номинального момента и скольжения.
Рассчитываем критическое скольжение и момент, для этого необходимо знать коэффициент λ.Mmax/Mн = λ
С помощью упрощенной формулы Клосса, рассчитываем моменты для других значений скольжений: 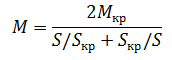 .
.
Рассчитываем для каждого значения скольжения момент и частоту вращения.
На основании расчетов строим саму механическую характеристику.
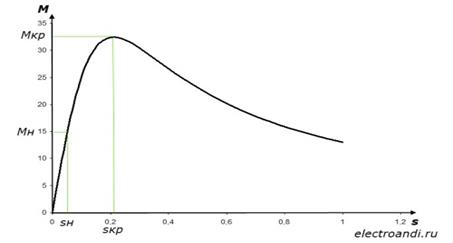
Зависимость момента от скольжения M = f(s)
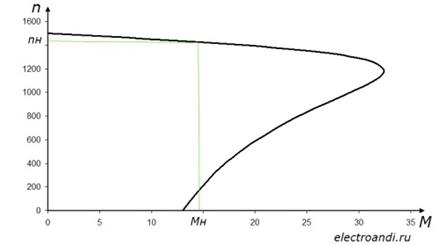
Зависимость частоты оборотов от момента n = f(M)
33. Способы регулирования скорости вращения ДПТ.
5.3.1. Преобразовательные устройства, применяемые при регулировании скорости двигателей
Как было рассмотрено выше, регулирование скорости возможно различными способами: изменением напряжения на якоре двигателя, изменением сопротивления в цепи якоря, изменением напряжения на обмотке возбуждения двигателя. Реостатное регулирование является не экономичным и по возможности используются другие, более экономичные способы регулирования скорости.
Регулирование скорости возможно при использовании преобразовательных устройств, которые позволяют изменять параметры энергии на своем выходе. Например, преобразователи для ДПТ позволяют менять значение напряжения на выходе, преобразователи для АД, кроме того, могут изменять частоту выходного напряжения. Первоначально в качестве управляемых преобразователей (управляемых выпрямителей для ДПТ) применяли электромашинные преобразователи. Такой преобразователь состоит из механически соединённых друг с другом АД и генератора постоянного тока независимого возбуждения. В настоящее время в связи с бурным развитием полупроводниковой техники ЭМП не используются ввиду экономической нецелесообразности.
Полупроводниковые преобразователи в настоящее время принято разделять на неуправляемые выпрямители (например, для питания обмотки возбуждения двигателя в однозонных САР), управляемые выпрямители, позволяющие изменять на выходе среднее значение напряжения; непосредственные преобразователи частоты, изменяющие частоту первой гармоники; частотные преобразователи, частота и напряжение на выходе которых меняется по какому-либо закону частотного управления.
5.3.2. Система генератор-двигатель
Рассмотрим основные свойства системы генератор-двигатель (Г-Д). Принципиальная схема системы Г-Д представлена на рис. 5.5. Она состоит из приводного двигателя Д (асинхронный или синхронный двигатель), который механически связан с генератором постоянного тока Г. Величина ЭДС генератора регулируется путем изменения напряжения на обмотке возбуждения генератора. Якоря генератора и двигателя электрически связаны друг с другом. Регулируемым параметром в данном случае выступает величина ЭДС двигателя. Для обеспечения магнитного потока в двигателе и генераторе используется возбудитель, который представляет собой ДПТ меньшей мощности  . В настоящее время в качестве возбудителей используются полупроводниковые преобразователи.
. В настоящее время в качестве возбудителей используются полупроводниковые преобразователи.
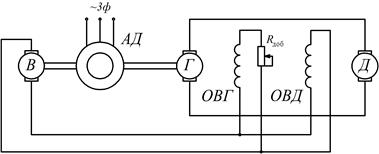
| 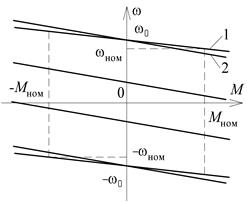
|
| Рис. 5.5. Принципиальная схема системы Г-Д | Рис. 5.6. Механические характеристики системы Г-Д |
Из уравнения равновесия напряжений по второму закону Ома можно составить уравнение ЭДС
 ,
,
где  – ЭДС генератора,
– ЭДС генератора,  – сопротивления якоря генератора.
– сопротивления якоря генератора.
Подставив в это уравнение значения ЭДС  и тока двигателя
и тока двигателя  , можно найти уравнение механической характеристики системы Г-Д:
, можно найти уравнение механической характеристики системы Г-Д:
 .
.
Вид механических характеристик представлен на рис. 5.6. Анализируя полученное уравнение МХ для системы ГД, можно заключить, что относительное падение напряжения в этой системе в вдвое выше (прямая 2 на рис. 5.6), чем у естественной характеристики двигателя (прямая 1 на рис 5.6). Обуславливается это наличием сопротивления генератора, которое примерно равно сопротивлению якоря двигателя, так как машины примерно одинаковой мощности.
Основным достоинством данного способа регулирования является высокая плавность регулирования скорости двигателя.
К недостаткам можно отнести следующее: в системе Г-Д происходит двукратное преобразование энергии: в приводном двигателе из электрическую в механическую, в генераторе из механической в электрическую, а также непосредственно в самом двигателе из электрической в механическую. Так как каждое устройство обладает своим КПД, становится очевидно, что в данной системе общий КДП, равный произведению КПД всех входящих в систему преобразовательный устройств  , не может иметь высокого значения.
, не может иметь высокого значения.
Кроме того, при работе ЭМП возникает дополнительный шум, ухудшающий условия работы персонала, повышаются расходы на обслуживание, а сама система обладает повышенными массогабаритными показателями, так как мощность приводного двигателя и генератора должны быть немного больше мощности двигателя. Ввиду указанных недостатков в настоящее время данная система вытеснена более совершенной системой регулирования скорости, называемой тиристорный преобразователь-двигатель (ТП-Д).
5.3.3. Система тиристорный преобразователь-двигатель
Развитие силовой электроники позволило создать и успешно развивать статические преобразователи, преобразующие переменное напряжение в регулируемое постоянное.
Изменение величины постоянного напряжения осуществляется регулированием угла открывания вентилей в проводящей части переменного напряжения. Выпрямленное напряжение содержит постоянную  и переменную составляющие. Наличие пульсаций выпрямленного напряжения ухудшает условия коммутации двигателей и увеличивает потери в них, поэтому на выходе выпрямителя часто устанавливают фильтр, представляющий собой реактор, включаемый последовательно с цепью якоря и обладающий таким реактивным сопротивлением, которое позволяет обеспечить допустимый уровень пульсаций тока в якоре двигателя. Другим средством уменьшения пульсаций является использование схем повышенной пульсности, что позволяет значительно уменьшить пульсации тока выпрямленного напряжения и тока, однако требует больших затрат на оборудование. Схема реверсивного ТП представлена на рис. 5.7.
и переменную составляющие. Наличие пульсаций выпрямленного напряжения ухудшает условия коммутации двигателей и увеличивает потери в них, поэтому на выходе выпрямителя часто устанавливают фильтр, представляющий собой реактор, включаемый последовательно с цепью якоря и обладающий таким реактивным сопротивлением, которое позволяет обеспечить допустимый уровень пульсаций тока в якоре двигателя. Другим средством уменьшения пульсаций является использование схем повышенной пульсности, что позволяет значительно уменьшить пульсации тока выпрямленного напряжения и тока, однако требует больших затрат на оборудование. Схема реверсивного ТП представлена на рис. 5.7.
Уравнение электромеханической характеристики для системы ТП-Д имеет следующий вид:
 ,
,
где  – среднее значение выпрямленного напряжения при холостом ходе выпрямителя и полностью открытых тиристорах (
– среднее значение выпрямленного напряжения при холостом ходе выпрямителя и полностью открытых тиристорах (  );
);  – действующее значений переменного напряжения;
– действующее значений переменного напряжения;  – число фаз выпрямителя;
– число фаз выпрямителя;  - эквивалентное сопротивление якорной цепи;
- эквивалентное сопротивление якорной цепи;  – активное и реактивное сопротивления трансформатора;
– активное и реактивное сопротивления трансформатора;  - активное сопротивление сглаживающего реактора.
- активное сопротивление сглаживающего реактора.
Механическую характеристику системы ТП-Д можно получить из электромеханической, выразив значение тока через момент двигателя,
 .
.
Вид МХ представлен на рис. 5.8. Характеристики имеют меньшую жесткость по сравнению с естественной МХ за счет дополнительных сопротивлений в якорной цепи. При различных углах включения наклон характеристик остаётся неизменным.
Характеристики системы ТП-Д с раздельным управлением комплектами в зоне малых нагрузок являются нелинейными. Нелинейность характеристик приводит к наличию дополнительных звеньев в системах регулирования, призванных выполнить линеаризацию МХ системы.
При наличии двух комплектов мостов ТП появляется возможность рекуперации энергии в сеть. Более того, такие преобразователи обладают бо’льшим быстродействием. Коэффициент полезного действия ТП составляет 0,9-0,94 для мощностей порядка 50-100 кВт, что существенно превосходит КПД системы Г-Д.
Таким образом, к достоинствам системы ТП-Д можно отнести широкий диапазон регулирования скорости, жесткость МХ, высокий КПД, небольшие массогабаритные показатели и невысокие эксплуатационные расходы, высокая надежность, более высокое быстродействие в сравнении с системой Г-Д.
Недостатком таких систем являются пульсации выпрямленного напряжения, снижение коэффициента мощности, обусловленное уменьшением угла управления тиристорами. Приближенно считают, что  .
.
В настоящее время система ТП-Д является основным видом регулируемого электропривода постоянного тока, применяемым в широком диапазоне мощностей: от привода металлорежущих станков до привода крупных прокатных станов.
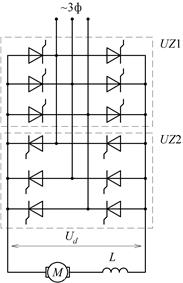
| 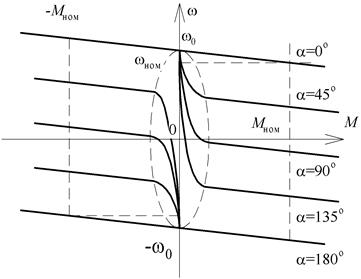
|
| Рис. 5.7. Схема реверсивного ЭП системы ТП-Д | Рис. 5.8. Механические характеристики системы ТП-Д |
34. Тормозные режимы работы электродвигателя постоянного тока.
Возможны три режима работы двигателя при торможении:
1. Рекуперативное торможение, т.е. торможение с отдачей энергии в сеть Е>Uс. ЭДС направлена навстречу напряжению. Направление тока якоря совпадает с направлением ЭДС двигателя.
2. Торможение противовключением. Направление ЭДС и напряжения сети совпадают. Ток направлен согласно ЭДС.
3. Динамическое торможение Uс=0.
Следует отметить, что когда машина работает двигателем напряжение ЭДС и тока в этом режиме противоположно. Когда машина работает генератором с отдачей энергии в сеть, направление ЭДС и тока двигателя совпадают. В генераторном режиме, когда ток направлен навстречу напряжению, происходит отдача энергии в сеть.
1. Рекуперативное торможение.
Этот вид торможения возможен только при скорости двигателя больше скорости w0 (w>w0) идеального холостого хода. Оно возможно в том случае, если на валу двигателя есть движущий активный момент.
Например: при случае спуска груза.
Рекуперативное торможение возможно и при регулировании скорости изменением напряжения на якоре двигателя, когда переход с более высокой скорости на более низкую.
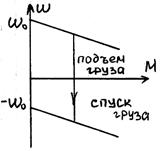
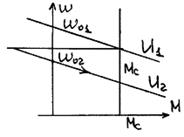
 ;
;  ;
; 
М<0, Iя<0.
2. Торможение противовключением.
- без рекуперации энергии в сеть, когда напряжение сети и ЭДС двигателя совпадают по направлению с напряжением и ЭДС. И это условие, когда напряжение сети совпадает по направлению с током, отрицает факт возврата энергии в сеть.
Торможение противовключением возможно в следующих случаях:
2.1 Когда прикладывается к валу двигателя движущий момент короткого замыкания. Например, при спуске груза. И в этом случае момент от груза вращает вал от двигателя в противоположную сторону направления момента двигательного режима.
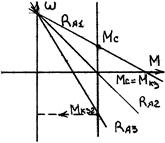 Мс>Мкз2 – торможение противовключения.
Мс>Мкз2 – торможение противовключения.
Rя1<Rя2<Rя3;
 ;
;  .
.
2.2  Противовключение можно осуществить изменением полярности напряжения на зажимах якоря двигателя при его вращении, что осуществляется переключением силовых контакторов в цепи якоря.
Противовключение можно осуществить изменением полярности напряжения на зажимах якоря двигателя при его вращении, что осуществляется переключением силовых контакторов в цепи якоря.
К1 – контактор «Вперед»
К2 – контактор «Назад»
К3 – контактор противовключения
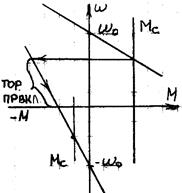
 ;
;
 ;
;
М<0, Iя<0;
 ;
;  ;
;  ;
;  ;
;  .
.
2.3 Изменением полярности напряжения на обмотке возбуждения двигателя. Применяется редко в связи с длительным переходным процессом.
Как и в режиме противовключения изменением полярности на зажимах якоря двигателя, так и при создании торможения противовключения изменением полярности напряжения на зажимах обмотки возбуждения, в якорь двигателя включается, для ограничения тока, дополнительное сопротивление.
3. Динамическое торможение двигателя постоянного тока независимого возбуждения.
Осуществляется отключением якоря двигателя от сети и закорачиванием якоря двигателя на активное сопротивление.
 - электромеханическая характеристика Iя=0;
- электромеханическая характеристика Iя=0;
 - механическая характеристика М<0.
- механическая характеристика М<0.
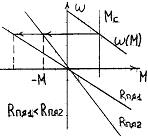
 ;
;  ;
;  ;
; 
35. Способы пуска двигателя постоянного тока.
Для пуска электродвигателей постоянного тока применяют два способа:
1. прямой пуск;
2. реостатный пуск.
Прямой пуск
При прямом пуске двигатель включается непосредственно в сеть ( рис. 5.1 ), для
чего вручную ( при ручном управлении ) или при помощи аппаратуры ( при автоматизиро-ванном пуске ) замыкают контакты К1 и К2..

Рис. 5.1. Прямой пуск двигателя: а – схема пуска; б – пусковая диаграмма
Ток якоря двигателя определяется из ф-лы равновесия ЭДС (см.ранее)
I  =
= 
При прямом пуске пусковой ток ЭД постоянного тока равен
І п = (10 – 20 ) І н
Такой пусковой ток для двигателя недопустим по 2-м причинам :
1. на коллекторе может возникнуть круговой огонь и получается режим КЗ двигателя, а следовательно выход двигателя из строя;
2. возникает ударный пусковой момент и механические повреждения .
Причины такого большого пускового тока :
1. малое сопротивление обмотки якоря;
2. отсутствие противоЭДС при пуске .
По Правилам Регистра, прямой пуск электродвигателей допускается при условии, что номинальная мощность двигателя не превышает 0,5 кВт,т.е. Р  ≤ 0,5 кВт.
≤ 0,5 кВт.
Объясним эти причины более детально.
Как известно из СЭМ, обмотка якоря ЭД постоянного тока имеет очень малое активное сопротивление (от 3 до 10 % от Rн) .
Пусть электродвигатель имеет такие данные: напряжение U = 220 В, номинальная противоЭДС обмотки якоря Е  = 210 В, сопротивление обмотки якоря двигателя R
= 210 В, сопротивление обмотки якоря двигателя R  = 1 Ом.
= 1 Ом.
Тогда номинальный ток якоря
I = =  = 10 А.
= 10 А.
При пуске скорость якоря ω = 0, поэтому противоЭДС обмотки якоря
Е = к* ω* Ф = к* 0* Ф = 0
( к – конструктивный коэффициент, величина постоянная, ω – угловая скорость якоря, Ф – магнитный поток, созданный параллельной обмоткой возбуждения L ).
Тогда пусковой ток якоря
I  = =
= =  =
=  = 220 А.
= 220 А.
Таким образом, пусковой ток якоря I = 220 А превышает номинальный I = 10 А в 22 раза, что недопустимо.
После пуска двигатель начнет разгоняться, в обмотке якоря появится и станет увеличиваться противоЭДС обмотки якоря ↑Е = к↑ωФ, а ток якоря – уменьшаться.
Процесс пуска прекратится в точке «В», в которой скорость якоря и ток якоря имеют номинальные значения: ω = ω , I = I .
Допускаемые по условиям коммутации значения пусковых токов не должны превышать номинальный более чем в 2,5 раза, т.е. не должно нарушаться соотношение
I ≤ 2,5 I
Выясним, как можно уменьшить пусковые токи.
Как следует из формулы пускового тока якоря
I = ,
его можно уменьшить двумя способами:
1. увеличить знаменатель, т.е. увеличить при пуске сопротивления цепи обмотки якоря ( реостатный пуск );
2. уменьшить числитель, т.е. уменьшить при пуске напряжение на обмотке якоря.
Рассмотрим поочередно эти два способа.
Реостатный пуск
Схема реостатного пуска изображена на рис. 5.3.
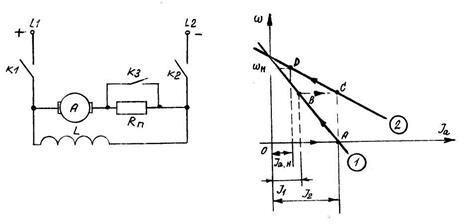
Рис. 5.3. Реостатный пуск двигателя: а – схема пуска; б – пусковая диаграмма
При пуске замыкаются контакты К1 и К2, контакт К3 разомкнут. Через контакты К1 и К2 на обмотку якоря «А» и параллельную обмотку возбуждения «L» подается питание сети, а через разомкнутый контакт КМ3 в цепь обмотки якоря вводится пусковой резистор R  , поэтому полное сопротивление обмотки якоря увеличивается до значения ( R + R ).
, поэтому полное сопротивление обмотки якоря увеличивается до значения ( R + R ).
Двигатель развивает пусковой ток
I = I  =
=  ≤ 2,5 I
≤ 2,5 I
На электромеханической характеристике ω( I ) двигатель переходит из точки «0» в точку «А», после чего начинает разгоняться по участку «АВ» характеристики.
В точке «В», при токе I  ( обычно I = 1,1…1,2 I ) контакт К3 замыкается, вследствие чего двигатель с броском тока переходит из точки «В» в точку «С» и далее продолжает разгоняться до точки «D», в которой наступит установившийся номинальный режим.
( обычно I = 1,1…1,2 I ) контакт К3 замыкается, вследствие чего двигатель с броском тока переходит из точки «В» в точку «С» и далее продолжает разгоняться до точки «D», в которой наступит установившийся номинальный режим.
На практике для ручного пуска применяют пусковые реостаты ( отсюда название этого способа – реостатный ), имеющие несколько ступеней.
Перед пуском маховичок реостата должен быть повернут влево до упора, при пуске его поворачивают по часовой стрелке, постепенно выводя ступени пускового резистора из цепи обмотки якоря двигателя ). Сам процесс пуска не должен превышать 6…8 с.
Нельзя оставлять маховичок реостата в промежуточном положении, при котором в цепи обмотки якоря останутся ступени пускового реостата, т.к. они сгорят.
Эти ступени рассчитаны лишь на кратковременное протекание через них пускового тока.
Второй способ рассмотрим при изучении схем Г-Д (генератор – двигатель).
36. Элементы конструкции и принцип действия машин постоянного тока.
Принцип действия электродвигателя:
Основан на взаимодействии магнитного поля и проводника с током.
 Если проводник с током поместить в магнитное поле на него начнет действовать выталкивающая сила.
Если проводник с током поместить в магнитное поле на него начнет действовать выталкивающая сила.
Вокруг проводника с током образуется собственное магнитное поле, имеющее концентрических окружностей. Направление силовых линий этого поля определяется по правилу буравчика.
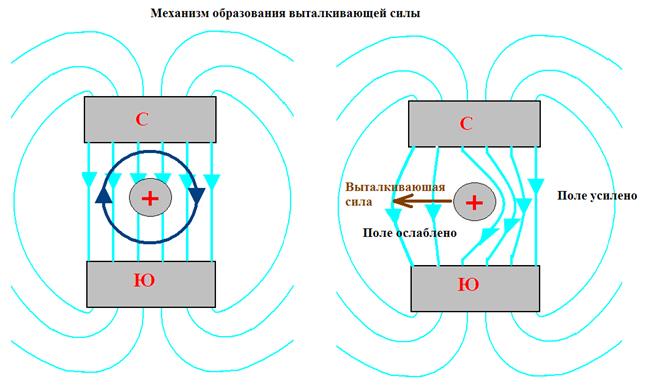
Когда проводник с током находится в магнитном поле, его магнитное поле накладывается на внешнее поле усиливая его с той стороны, где направление силовых линий обоих полей совпадает и ослабляя с противоположной стороны, где силовые линии полей направлены в противоположные стороны.
В результате и образуется выталкивающая сила. Более сильное поле выталкивает проводник в сторону более слабого поля.
Направление выталкивающей силы определяется по правилу левой руки.
«Если расположить левую руку так, чтобы силовые линии входили в ладонь, вытянутые 4 пальца показывали направление движения тока в проводнике, тогда отогнутый большой палец укажет направление действия выталкивающей силы».
А ее величина определяется по формуле;  I, где:
I, где:
В – величина магнитной индукции (плотность магнитного потока);
l – активная длинна проводника
I – скорость движения проводника;
Простейший электродвигатель
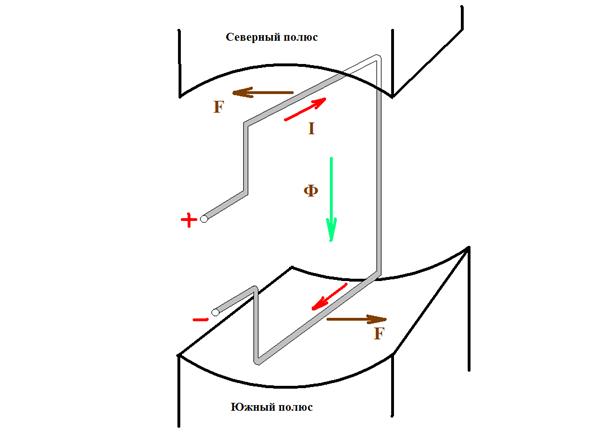 Представляет из себя проводник выполненный в форме рамки, помещенный в магнитное поле между двух полюсов, при прохождении тока по проводнику на его активные стороны начинают действовать пара выталкивающих сил F создающая вращательный момент, заставляющий рамку поворачиваться.
Представляет из себя проводник выполненный в форме рамки, помещенный в магнитное поле между двух полюсов, при прохождении тока по проводнику на его активные стороны начинают действовать пара выталкивающих сил F создающая вращательный момент, заставляющий рамку поворачиваться.
В реальности такой двигатель работать не сможет. Рассмотрим 3 положения рамки.
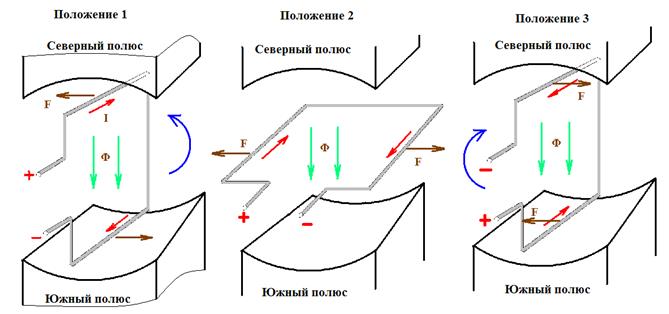
| Вращение против часовой стрелки | Вращения нет, рамка растягивается | Вращение по часовой стрелке |
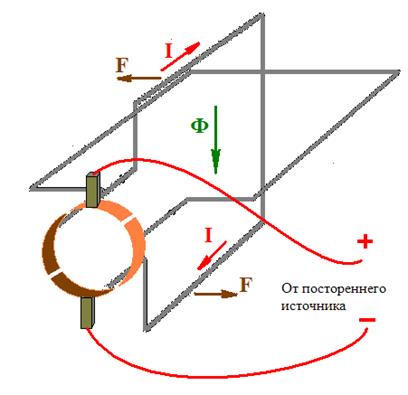 Реальный двигатель должен иметь не одну, а несколько рамок и снабжен специальным устройством – коллектором, обеспечивающим поочередное соединение рамок с внешней цепью при помощи скользящих щеток и осуществляющем переключение рамок таким образом, чтобы во всех проводниках рамок находящимся под одним полюсом было одно направление тока, а во всех проводниках рамок под другим полюсом также одно, но противоположное направление тока
Реальный двигатель должен иметь не одну, а несколько рамок и снабжен специальным устройством – коллектором, обеспечивающим поочередное соединение рамок с внешней цепью при помощи скользящих щеток и осуществляющем переключение рамок таким образом, чтобы во всех проводниках рамок находящимся под одним полюсом было одно направление тока, а во всех проводниках рамок под другим полюсом также одно, но противоположное направление тока
ПРИНЦИП ДЕЙСТВИЯ ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА
Основывается на явлении электромагнитной индукции

 Рассмотрим систему состоящую из проводника и магнитного поля.
Рассмотрим систему состоящую из проводника и магнитного поля.
При движении проводника через магнитное поле в нем создается электродвижущая сила Е, направление этой силы определяется по правилу правой руки
«Если расположить правую руку так, чтобы силовые линии входили в ладонь, отогнутый большой палец показывал направление движения проводника , тогда вытянутые 4 пальца укажут направление индуктируемой ЭДС и тока в проводнике»
Величина ЭДС определяется по формуле:
 где:
где:
В – величина магнитной индукции (плотность магнитного потока);
l – активная длинна проводника
V – скорость движения проводника;
Cos α – коэффициент учитывающий направление движения относительно направления силовых линий поля.
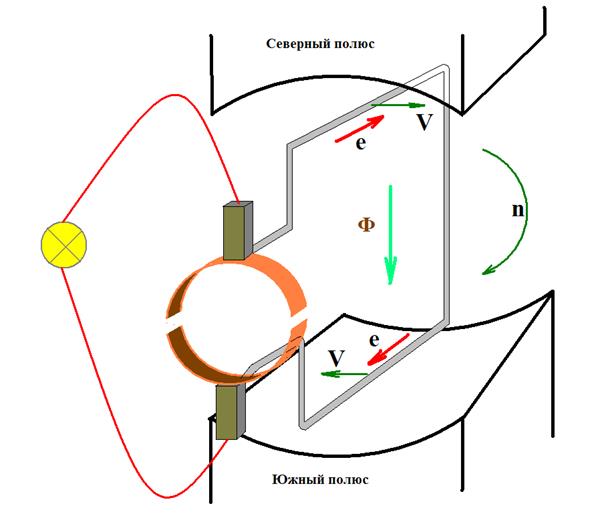 Простейший генератор можно представить в виде рамки вращающейся в магнитном поле
Простейший генератор можно представить в виде рамки вращающейся в магнитном поле
При вращении рамки ее проводники пересекают силовые линии поля и в них индуктируется ЭДС, причем направление ЭДС обоих активных сторон суммируются. Но величина индуктируемых ЭДС постоянно меняется в зависимости от угла поворота рамки и даже меняет направление когда активные стороны рамки меняются местами.
Таким образом при вращении рамки в ней создается переменная ЭДС. И один полный оборот рамки соответствует полному периоду изменяющейся ЭДС.
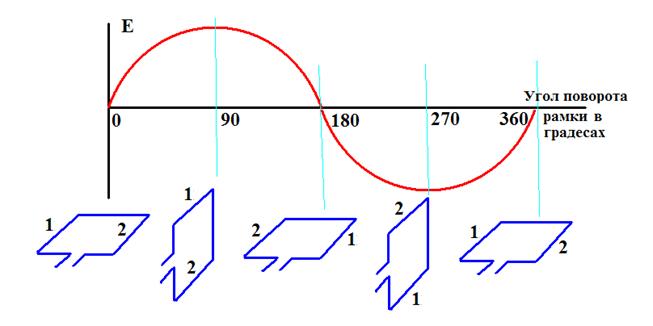
 Чтобы превратить переменный ток в постоянный используется такой же коллектор, как и у двигателя при этом получается выпрямленный, но пульсирующий ток.
Чтобы превратить переменный ток в постоянный используется такой же коллектор, как и у двигателя при этом получается выпрямленный, но пульсирующий ток.
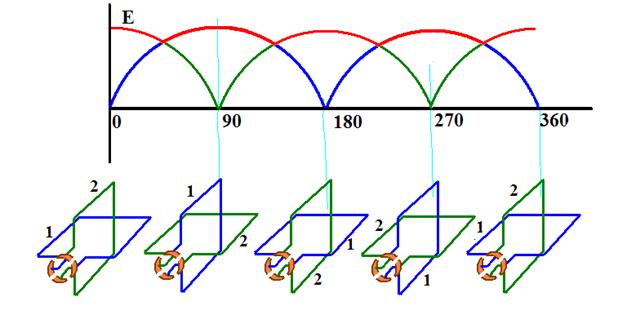 Если применить систему из двух рамок развернутых относительно друг друга на 90 градусов и кольцо, выполняющее роль коллектора разрезать на 4 части, то при вращении такой системы рамок получим не только выпрямленный, но и сглаженый ток. И чем больше рамок будет у реального генератора, тем более сглаженный ток будет вырабатывать генератор.
Если применить систему из двух рамок развернутых относительно друг друга на 90 градусов и кольцо, выполняющее роль коллектора разрезать на 4 части, то при вращении такой системы рамок получим не только выпрямленный, но и сглаженый ток. И чем больше рамок будет у реального генератора, тем более сглаженный ток будет вырабатывать генератор.
Коллектор генератора постоянного тока обеспечивает соединения обмотки якоря с внешней электрической цепью, а также выполняет роль механического выпрямителя.
ПРИНЦИП ОБРАТИМОСТИ МАШИН ПОСТОЯННОГО ТОКА.
| Двигатель | Генератор | |
| Обе электрические машины состоят из одних и тех же частей, но выполняют обратные превращения энергии | ||
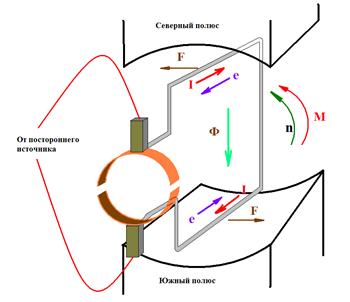
| 
| |
| Электрическую энергию превращает в механическую | Механическую энергию превращает в электрическую | |
| Совпадают по направлению вращающий момент и направление вращения | Вращающий момент направлен в сторону противоположную направлению вращения | |
| ЭДС индуктируемая в обмотке якоря направлена против тока и приложенного напряжения | Совпадают по направлению ток и ЭДС |
| Вращающий момент вырабатываемый двигателем | 
| Электромагнитный момент сопротивления вращения |
| Противо-ЭДС направлена против тока и приложенного напряжения. | 
| Вырабатываемая ЭДС, обеспечивающая прохождение тока по замкнутой цепи. |
| Определение тока двигателя | 
| В режиме холостого хода напряжение генератора равно ЭДС |

| Определение скорости вращения якоря двигателя | 
| В нагрузочном режиме напряжение меньше ЭДС на величину падения напряжения в самом генераторе |
ОСНОВНЫЕ ЧАСТИ МАШИН ПОСТОЯННОГО ТОКА.
Магнитная система
Остов – являясь корпусом машины, одновременно выполняет роль магнитопровода;
Главные полюса – создающие основной магнитный поток, состоят из сердечников и катушек.
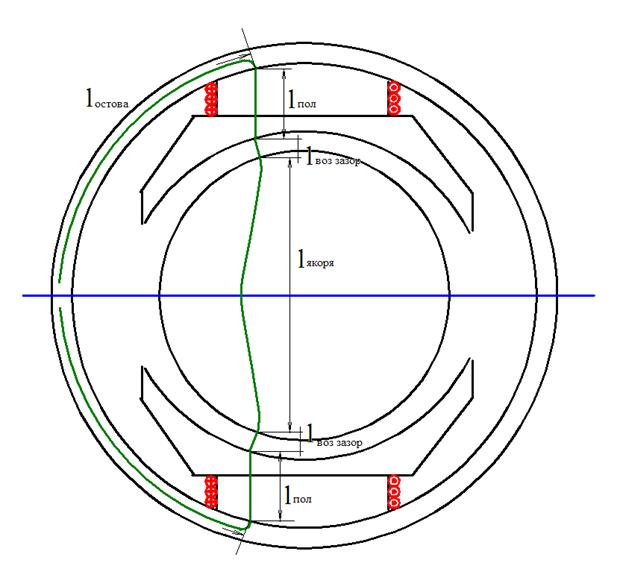 Двухполюсная машина имеет два разноименных полюса расположенных напротив друг друга. Катушки главных полюсов включаются последовательно и встречно по направлению тока, так чтобы они образовывали разную полярность
Двухполюсная машина имеет два разноименных полюса расположенных напротив друг друга. Катушки главных полюсов включаются последовательно и встречно по направлению тока, так чтобы они образовывали разную полярность
Величина магнитного потока для магнитной цепи определяется по формуле:
 где:
где:
I*W– магнитодвижущая сила, определяется как произведение силы тока Iна количество витков катушек на обеих полюсах W
R магн магнитное сопротивление цепи состоящее из сопротивления остова; 2-х сердечников полюсов; сердечника якоря и 2-х воздушных зазоров.
Двухполюсная машина имеет одну пару полюсов и один магнитный поток выходящий из северного полюса пронизывающий тело якоря и уходящий в южный полюс.
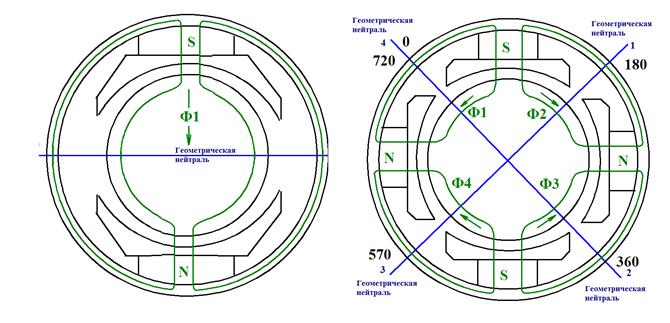
 У многополюсных машин количество магнитных потоков соответствует количеству главных полюсов. Соединения обмоток возбуждения могут выполняться различным способом.
У многополюсных машин количество магнитных потоков соответствует количеству главных полюсов. Соединения обмоток возбуждения могут выполняться различным способом.
Последовательное соединение всех катушек главных полюсов, обеспечивает относительно более равные по величине магнитные потоки. Но при очень больших токах нагрузки применяется смешанное соединение катушек полюсов.
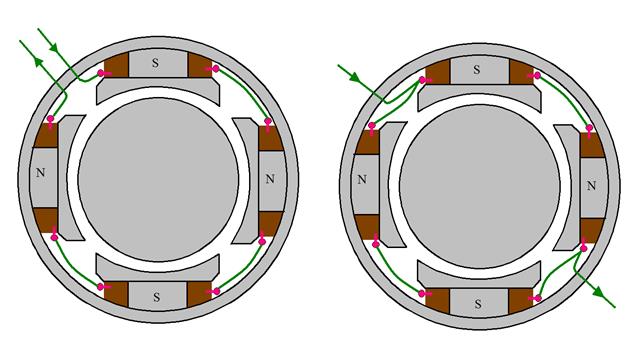
| Магнитные потоки относительно равны, так как по катушкам полюсов проходит один и тот же ток, а катушки имеют равное количество витков. Разность потоков образуется за счет неодинаковых воздушных зазоров из-за неточностей изготовления и сборки. | На разность магнитных потоков оказывает влияние качество контактов в соединениях катушек полюсов и возможная неравномерность распределения тока по параллельным ветвям. |
Обмотка якоря
Применяются основных три вида обмотки якоря:
Петлевая;
Волновая;
Смешанная
Простая петлевая обмотка:
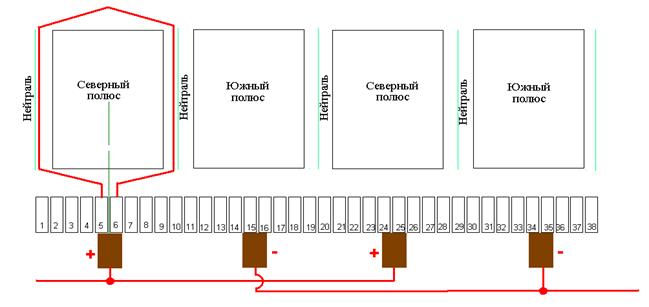
Шаг по коллектору 1; шаг по пазам якоря диаметральный. Укладка обмотки производится последовательно с 1-й на 2-ю; со 2-й на 3-ю и так до конца последняя секция укладывается с последней на 1-ю коллекторную пластину.
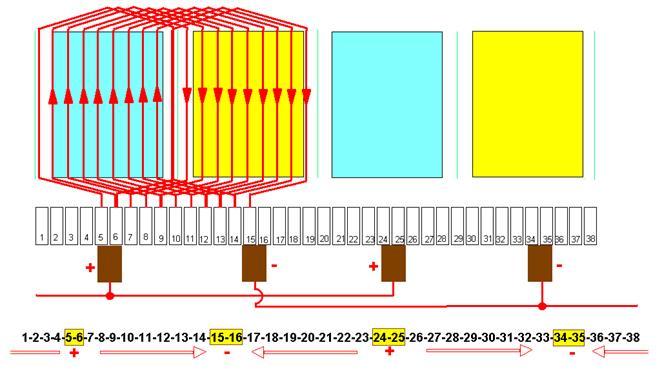
Петлевая обмотка имеет параллельные ветви прохождения по ней тока равно числу главных полюсов. Она применяется для машин работающих с большим током нагрузки.
В связи с тем, что при вращении якоря в каждой параллельной ветви число последовательно работающих секций постоянно меняется в процессе работы в каждой параллельной ветви создается собственная ЭДС отличная от ЭДС в других параллельных ветвях. Так по нашей схеме между 6 и 15, а также между 25 и 34 коллекторными пластинами последовательно находятся по 9 секций, а между 5 и 35 также между 24 и 16 коллекторными пластинами последовательно находятся по 8 секций. Учетом реальной толщины щеток в процессе вращения якоря количество последовательных секций между положительными и отрицательными щетками будет постоянно меняться от 7 до 9 секций. С учетом того, что в реальной машине напряжение одной секции по расчетам составляет 14-16 Вольт, то разница ЭДС в параллельных секциях может достигать от 14 до 32 Вольт.
По этой причине в обмотке якоря между секциями создается разность потенциалов, под воздействием которой возникает уравнительный ток.
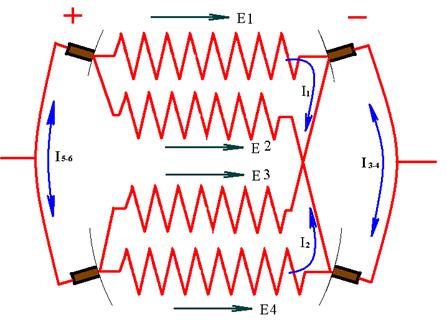
Отдельные уравнительные токи I1иI2 проходят не загружая щеточный аппарат машины, но токи I3-4 и I5-6 проходят через щеточный аппарат, усложняя работу щеток, повышая плотность тока в переходном контакте Щетка-Коллектор вызывают повышенное искрение под щетками и способствуют образования кругового огня.

Для разгрузки щеток от уравнительных токов при простой петлевой обмотке применяют уравнительные соединения 1-го рода. Которые соединят друг с другом коллекторные пластины одновременно находящиеся под плюсовыми или минусовыми щетками.
Уравнительные соединения чаще всего делают не на всех подряд коллекторных пластинах. А с учетом ширины щеток через одну и ли через две коллекторные пластины.
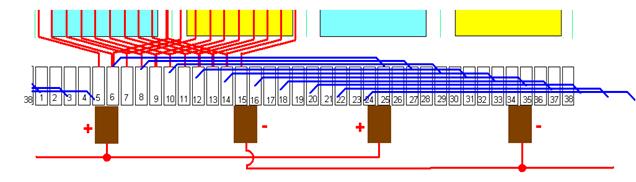 Для увеличения большего тока в машинах большой мощности применяется сложная (двузаходная) петлевая обмотка, имеющая увеличенный на одну шаг по коллектору. Секция начинается на 1-й коллекторной пластине, а заканчивается не на 2-й, а на 3-й коллекторной пластине. Такая обмотка имеет как бы два хода по коллектору один по четным коллекторным пластинам, а второй по нечетным пластинам. Так как щетка имеет ширину позволяющую перекрывать не одну а 3-4 коллекторные пластины количество параллельных ветвей удваивается. Такая обмотка обеспечивает прохождение тока в 2 раза большей величины, но при этом напряжение рабочее также в два раза должно быть снижено.
Для увеличения большего тока в машинах большой мощности применяется сложная (двузаходная) петлевая обмотка, имеющая увеличенный на одну шаг по коллектору. Секция начинается на 1-й коллекторной пластине, а заканчивается не на 2-й, а на 3-й коллекторной пластине. Такая обмотка имеет как бы два хода по коллектору один по четным коллекторным пластинам, а второй по нечетным пластинам. Так как щетка имеет ширину позволяющую перекрывать не одну а 3-4 коллекторные пластины количество параллельных ветвей удваивается. Такая обмотка обеспечивает прохождение тока в 2 раза большей величины, но при этом напряжение рабочее также в два раза должно быть снижено.

Такая обмотка имеет уравнительные соединения второго рода. Средняя точка каждой секции соединена со средней коллекторной пластиной секции. На примере секция начинается на 5-й, заканчивается на 7-й. средняя 6-я пластина. Такими уравнительными соединениями связывают четный и нечетный ход обмотки якоря.
Волновая обмотка
Применяется только на многополюсных машинах, это обмотка предназначается для работы с большим напряжением. Шаг по пазам якоря не отличается от петлевой обмотки, а шаг по коллектору у нее равен двум (электрическим) диаметрам.
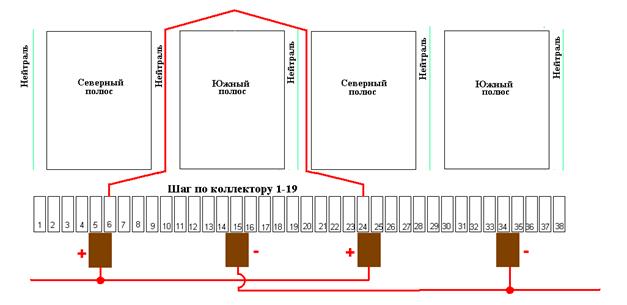 Последователь уложенные секции простой волновой обмотки образуют две параллельные ветви прохождения тока, причем рабочие стороны последовательно включенных секций располагаются под всеми полюсами машины и оказываются в абсолютно равных условиях и равных магнитных потоках.
Последователь уложенные секции простой волновой обмотки образуют две параллельные ветви прохождения тока, причем рабочие стороны последовательно включенных секций располагаются под всеми полюсами машины и оказываются в абсолютно равных условиях и равных магнитных потоках.
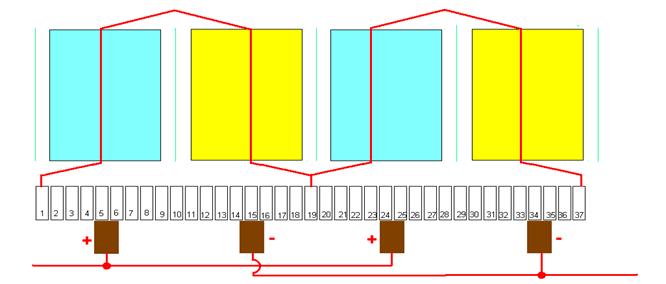
При этом часть секций накоротко замкнута одноименными щетками, и выполняет роль уравнительных соединений.
Если увеличить число коллекторных пластин на одну или уменьшить на три и сохраним шаг по коллектору получим сложную двухзаходную волновую обмотку.
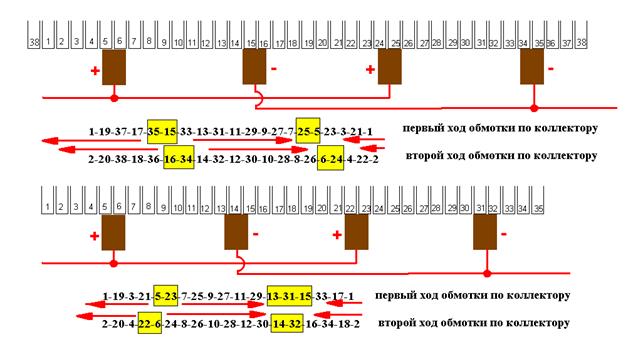
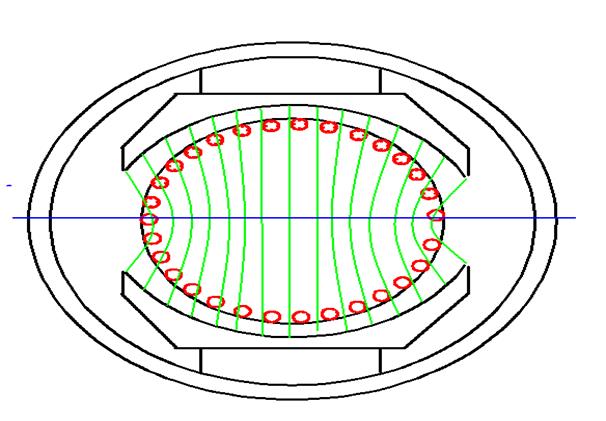 Реакция якоря
Реакция якоря
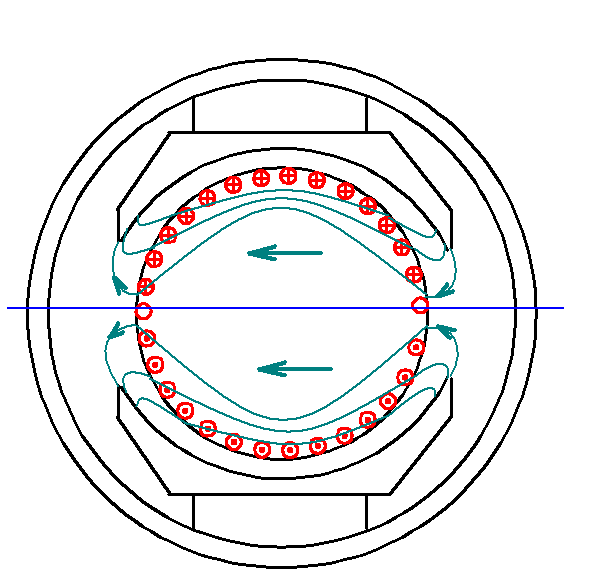
Главные полюса электрической машины создают основной магнитный поток, который под подошвой полюса должен быть равномерным. Обеспечивая равное воздействие на активные проводники обмотки якоря. Но такой поток сохраняется только на холостом ходу.
Как только машина начинает работать под нагрузкой и в обмотке якоря появляется ток обмотка якоря создает свой магнитный поток, направленный перпендикулярно магнитному потоку главных полюсов. В результате взаимодействия этих двух магнитных потоков происходит искажение магнитного потока главных полюсов, это явление и получило название РЕАКЦИЯ ЯКОРЯ.
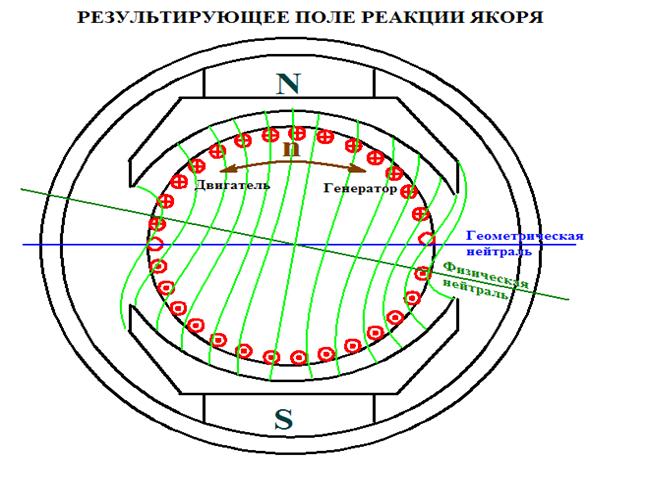
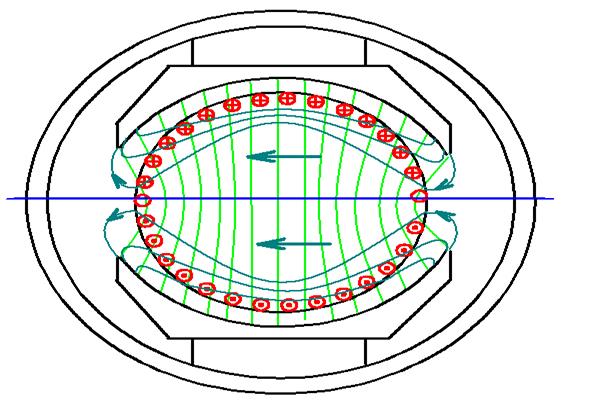
В результате реакции якоря нарушается равномерность магнитного потока под подошвами главных полюсов он ослабляется с одной стороны полюса и усиливается с другой стороны. У генераторов усиление поля происходит под сбегающим краем полюсов, а у двигателя наоборот под набегающим краем полюса. А также происходит смещение оси симметрии магнитного потока с геометрической на физическую нейтраль.
 Последствия реакции якоря.
Последствия реакции якоря.
1. Неравномерное распределение магнитного потока главных полюсов и как следствие уменьшение суммарного магнитного потока и уменьшение мощности машины.
2. Ухудшение условий коммутации. повышенное искрение под щетками.
3. В момент прохождения активными проводниками секций под краями полюсов с увеличенным магнитным потоком резко возрастает напряжение на коллекторных пластинах этой секции. Возможность возникновения кругового огня.
Устранение вредных последствий реакции якоря.
На машинах малой мощности до 1 кВт., работающих с постоянной нагрузкой и не меняющих направление вращения применяется сдвиг щеток с геометрической на физическую нейтраль. Щеткодержатели устанавливаются на поворотную траверсу. Во время работы машины, поворачивая траверсу, находят положение с минимальным искрением щеток и потреблением наименьшего тока и в этом положении траверсу закрепляют.
В машинах большей мощности обязательно применяются добавочные полюса, которые устанавливают на геометрической нейтрали, между главными полюсами. Добавочные полюса создают магнитный поток направленный встречно магнитному потоку обмотки якоря, а чтобы эти два потока всегда соответствовали друг другу катушки добавочных полюсов всегда включаются последовательно с обмоткой якоря.
Полярность дополнительных полюсов
Для машин мощностью более 250 кВт дополнительно используют компенсационную обмотку, укладываемую в пазы подошвы главных полюсов и включенных в схему машины также как и дополнительные полюса, последовательно с обмоткой якоря.
Коммутация
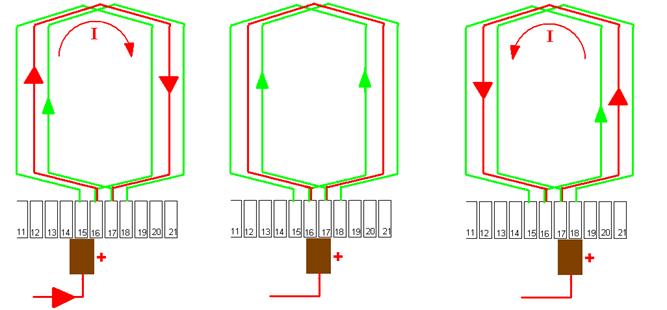 Понятие коммутация – это изменение состояния электрической цепи, то есть любое ее изменение. Но если в обычных электрических цепях переключения происходят относительно редко, то при работе любой электрической машины переключения в большом количестве происходят постоянно. Рассмотрим переход секции якоря из одной параллельной ветви в другую в момент когда ее коллекторные пластины проходят под щеткой.
Понятие коммутация – это изменение состояния электрической цепи, то есть любое ее изменение. Но если в обычных электрических цепях переключения происходят относительно редко, то при работе любой электрической машины переключения в большом количестве происходят постоянно. Рассмотрим переход секции якоря из одной параллельной ветви в другую в момент когда ее коллекторные пластины проходят под щеткой.
Первая позиция-начало коммутации рабочий ток в секции протекает по часовой стрелке с 16 на 17 коллекторную пластину;
Вторая позиция- секция с 16 на 17 коллекторные пластины накоротко замкнута щеткой рабочего тока в ней нет;
Третья позиция-окончание коммутации. 16 коллекторная пластина вышла из под щетки и ток в секции протекает против часовой стрелки с 17 на 16 коллекторную пластину.
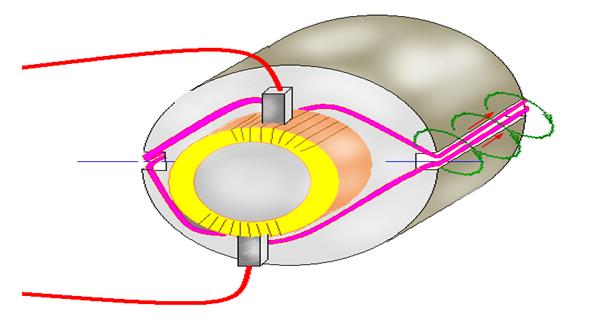
А процесс коммутации перешел на следующую секцию. И это одновременно происходит под всеми щетками машины.
Так, как этот процесс протекает за очень короткое время, в коммутируемой секции создается реактивная ЭДС состоящая из ЭДС самоиндукции и ЭДС взаимоиндукции. И эти обе ЭДС направлены на поддержание в коммутируемой секции тока предшествующего процессу коммутации.
ер = ес + ев
На рисунке видно, что активные проводники двух, одновременно коммутирующих секций, находятся в одном пазу и наводят друг в друге ЭДС взаимоиндукции.
В результате действия реакции якоря в этих же проводниках, пересекающих геометрическую нейтраль создается еще и 3-я ЭДС вращения, (евр) которая направлена также как и реактивная ЭДС. А так как секции накоротко замкнуты щетками в них возникает ток коммутации.
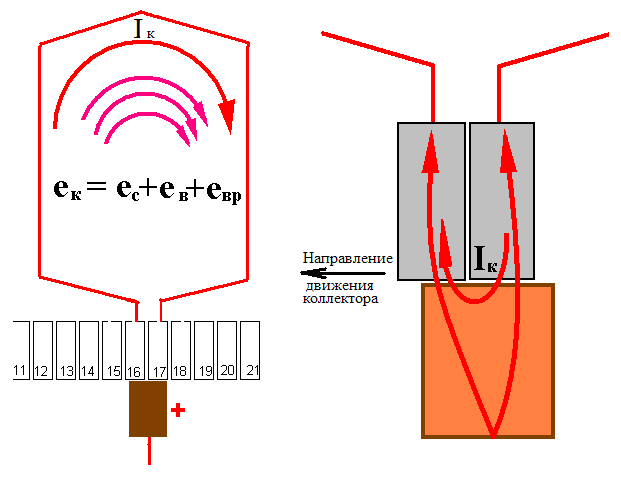
Коммутирующий ток проходя через коллекторные пластины и щетки приводит к перераспределению силы тока между коллекторными пластинами и щеткой. Так между щеткой и набегающей коллекторной пластиной ток нагрузки и коммутирующий ток направлены встречно друг другу, следовательно результирующий ток перехода уменьшается, а на сбегающей коллекторной пластине ток нагрузки и коммутирующий ток направлены в одну сторону, следовательно результирующий ток перехода увеличивается. При этом, так как коллекторная пластина уходит из под щетки и площадь контакта стремительно уменьшается, плотность тока нарастает и в момент отрыва коллекторной пластины от щетки происходит разрыв тока большой плотности, что и приводит к образованию искрения.
Таким образом, коммутация электрических машин постоянного тока характеризуется степенью искрения под щетками. Различают 5 степеней коммутации.
| темная | Практически искрения нет | Допускается работа машины без ограничения | |
| слабая | Незначительное искрение | |

| средняя | Искрение наблюдается на половине щеточного пространства | |
| сильная | Искрение наблюдается на большей части щеточного пространства | Не допустимые режимы работы машины | |
| тяжелая | Сплошное искрение с вылетом крупных снопов огня |
37. Способы возбуждения генераторов постоянного тока. Основные характеристики генератора постоянного тока.
ГПТ широко применяются в различных промышленных, транспортных и других установках для питания двигателей постоянного тока, возбуждения синхронных машин, для питания гальванических установок и т.д.
По способу возбуждения (рис.1.45) ГПТ делятся на генераторы с самовозбуждением и генераторы с независимым возбуждением. Генераторы независимого возбуждения могут возбуждаться от постороннего источника постоянного тока (электромагнитное возбуждение) или от постоянных магнитов (магнитоэлектрическое возбуждение).
Генераторы с самовозбуждением делятся на генераторы параллельного (шунтового), последовательного (сериесного) и смешанного (компаундного) возбуждения.
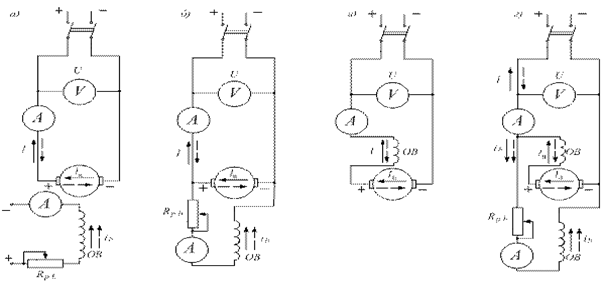
Рис. 1.45. Схемы возбуждения генераторов:
а) независимое; б) параллельное; в) последовательное; г) смешанное.
Уравнение напряжения генератора имеет вид:
 (1.137)
(1.137)
где  – э.д.с. якоря; Rа – полное сопротивление якоря.
– э.д.с. якоря; Rа – полное сопротивление якоря.
Работа ГПТ независимого возбуждения определяется следующими основными характеристиками:
1) холостого хода;
2) короткого замыкания;
3) внешняя;
4) регулировочная;
5) нагрузочная.
Достоинства и недостатки генераторов с независимым возбуждением.
Достоинства в том, что независимая обмотка возбуждения позволяет независимо изменять поток возбуждения в широком диапазоне вниз от номинальной величины по любому закону, в том числе и требуемому по технологии, и изменять выходное напряжение так же по требуемому закону.
Недостаток является продолжением достоинства генератора независимого возбуждения: для независимой обмотки возбуждения требуется отдельный источник питания.
Схема для снятия характеристик генератора постоянного тока независимого возбуждения представлена на рис. 1.46, а энергетическая диаграмма показана на рис. 1.47.
 Рис. 1.46. Схема для снятия характеристик
Рис. 1.46. Схема для снятия характеристик
38. Построить механическую и скоростную (электромеханическую) характеристики двигателя постоянного тока независимого возбуждения по паспортным данным .
Схема включения:
Обмотки возбуждения ДПТ ПВ включены последовательно с якорем. Поток возбуждения двигателя будет определятся нагрузкой на валу двигателя. Уравнение равновесия напряжения данного двигателя имеет вид Uc=E+Iя(Rz+Rпя+Rов); Е=КФ(Iя)w.
 ;
;
 .
.
Т.е. вид уравнения данного двигателя аналогичен виду ДПТ НВ, но в эти двигатели дополнительно входит сопротивление обмотки возбуждения и, в отличие от двигателя независимого возбуждения, нельзя аналитически в общем виде получить электромеханические скоростные характеристики двигателя, так как поток и ток возбуждения связаны нелинейной зависимостью, которую трудно представить в виде формулы. Для построения электромеханических и механических характеристик необходимо знать зависимости Ф*(Iя*) и М*(Iя*) , которые были бы универсальными для всей серии двигателей. Эти зависимости существуют, так как внутри одной серии зазоры и степень насыщения машин мало отличаются друг от друга для всех машин.
Приблизительно вид таких зависимостей следующий:
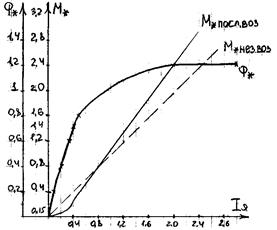
I зона - Iя*£0,3; М*£0,15;
II зона - Iя*=0,3¸1,3; М*=0,15¸1,4;
III зона - Iя*>1,3; М*>1,4.
Следует обратить внимание, что при токе Iя*>1 момент, развиваемый двигателем с последовательным возбуждением, возрастает в большей степени, чем ток М*>Iя* и эта ситуация является одним из достоинств двигателей с последовательным возбуждением. При одной и той же перегрузке по току двигатели последовательного возбуждения развивают больший момент. Это связанно с тем, что с увеличением тока растет поток двигателя. Так для двигателя независимого возбуждения:
Iя*доп=2¸2,5 - М*=2,0¸2,5 – НВ
Iя*доп=2¸2,5 - М*=2,4¸3,0 – ПВ
Зная зависимости Ф*(Iя*) и М*(Iя*), можно построить одну зависимость Ф*(М*)
Для полного представления о характеристиках двигателя с последовательным возбуждением пользуются кусочно-линейной аппроксимацией кривой намагничивания Ф(Iя).
1,2 зона: Ф=a1Iя; М=КФIя;  ;
;  ;
;
 ;
;
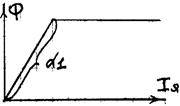
 .
.
3 зона: Ф=Ф0+a2Iя
Из выражения скоростных характеристик видно, что они представляют из себя кривые гиперболического вида одной из асимптот, которой является ось ординат, а второй -асимптотой говорить не имеет смысла, так как она соответствует Iя®¥, М®¥, т.е. она лежит вне аппроксимации.
Из выражения электромеханических характеристик видно, что при идеальном холостом ходе, когда ток якоря и момент стремятся к нулю, скорость двигателя w®¥. В действительности при токе якоря равном нулю, есть остаточное магнитное поле Фост*=0,02¸0,09 и наличие остаточного поля беспечивает величину скорости идеального холостого хода  . Скорость при этом превышает номинальную скорость в 10 раз, что недопустимо из условия прочности коллектора и бандаже крепящих обмоток якоря.
. Скорость при этом превышает номинальную скорость в 10 раз, что недопустимо из условия прочности коллектора и бандаже крепящих обмоток якоря.
Следует заметить, что допустимым значением идеального холостого хода для выпускаемых двигателей является w0*доп<4.
Данные двигатели последовательного возбуждения нельзя применять для механизмов, у которых возможен режим холостого хода с малыми потерями. Эти двигатели запрещается применять для механизмов с использованием цепных, ременных и клиноременных передач.
Наибольшая крутизна электромеханических характеристик в начальной части. Участок линейной аппроксимации в третей зоне обеспечивает более пологую механическую характеристику. На участках большей нагрузки Iя*>2, крутизна электромеханических характеристик практически не зависит от нагрузки. При полюсном насыщении магнитной цепи двигателя уравнение двигателя последовательного возбуждения становится аналогичным что и для двигателей с независимым возбуждением. В этом случае электромеханические характеристики будут представлять из себя прямые линии.
39. Двигатели постоянного тока последовательного и смешанного возбуждения.
Двигатель с параллельным возбуждением. В этом двигателе (рис. 8.59, а) обмотка возбуждения подключена параллельно с обмоткой якоря к сети. В цепь обмотки возбуждения включен регулировочный реостат Rр.в., а в цепь якоря — пусковой реостат Rп . Характерной особенностью двигателя является то, что его ток возбуждения Iв не зависит от тока якоря Iа (тока нагрузки), так как питание обмотки возбуждения по существу независимое. Следовательно, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. При этом условии согласно (8.84) и (8.85) получаем, что зависимости М = f(Ia ) и n = f(Ia) (моментная и скоростная характеристики) линейные (рис. 8.59,б). Следовательно, линейна и механическая характеристика двигателя n = f(M) (рис. 8.60, а).
Если в цепь якоря включен добавочный резистор или реостат Rп , то
п = [U - Iа(ΣRа + Rn )]/(свФ) = n0 - Δn, (8.86)

Рис. 8.59. Схема двигателя с параллельным возбуждением и его моментная и скоростная характеристики.
где n0 = U/(свФ) — частота вращения при холостом ходе; Δп = (ΣRа + Rn )Iа /(свФ) — снижение частоты, обусловленное суммарным падением напряжения во всех сопротивлениях, включенных в цепь якоря двигателя. Величина Δn , зависящая от суммы сопротивлений ΣRа + Rn , определяет наклон скоростной n = f(Ia) и механической n = f(M) характеристик к оси абсцисс.
Двигатель с последовательным возбуждением. В этом двигателе (рис. 8.61, а) ток возбуждения Iв = Ia, поэтому магнитный поток Ф является некоторой функцией тока якоря Ia. Характер этой функции изменяется в зависимости от нагрузки двигателя. При Ia < (0,8 ÷ 0,9)Iном, когда магнитная система машины не насыщена, Ф = kф Ia , причем коэффициент пропорциональности kф в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании тока якоря поток Ф возрастает медленнее, чем Ia , и при больших нагрузках (Ia > Iном ) можно считать, что Ф ≈ const. В соответствии с этим изменяются в зависимости n = f(Ia) и М = f(Ia). При Ia <(0,8 ÷ 0,9)Iном скоростная характеристика двигателя n = f(Ia) (рис. 8.61, б) имеет форму гиперболы, так как частота вращения: где С1 и С2 - постоянные.

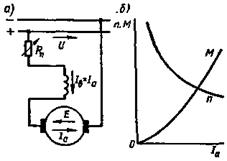
Рис. 8.61. Схема двигателя с последовательным возбуждением и его моментная и скоростная характеристики.
Двигатель со смешанным возбуждением. В этом двигателе (рис. 8.63, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной и последовательной. Поэтому его механические характеристики (рис. 8.63,б, кривые 3 и 4) располагаются между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения МДС параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (при малой МДС последовательной обмотки) или к характеристике 2 (при малой МДС параллельной обмотки). Одним из достоинств двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, так как его частота вращения n0 имеет конечное значение.
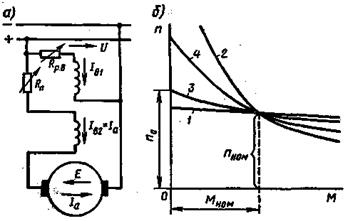
Рис. 8.63. Схема двигателя со смешанным возбуждением и его механические характеристики.
40. Потери мощности и КПД машин постоянного тока.
КПД машины является отношением полезной выходной мощности Р2 к подводимой Р1. Для определения КПД, как правило, применяются косвенные методы, при которых вычисляются потери мощности при нагрузке.
Наиболее просто определяются электрическая мощность на выходе генератора Р2 и мощность, подводимая к двигателю, Р1. Поэтому выражения КПД для генераторов и двигателей обычно отличаются друг от друга:
для генераторов  ; (27)
; (27)
для двигателей  . (28)
. (28)
Определение выходной мощности и порядка учета потерь двигателя с параллельным возбуждением показаны на диаграмме (рис. 17).
Потери в цепи якоря двигателя параллельного возбуждения рм состоит из потерь в сопротивлениях обмотки якоря rя, обмотки добавочных полюсов rд.п, компенсационной rк (при наличии), а также потерь в контакте щетки – коллектор. Сопротивление цепи берется при температуре 750С, падение напряжения в контакте щетки – коллектор ΔU принимается неизменным (1,5…2 В). Исходя из этого,
 . (29)
. (29)
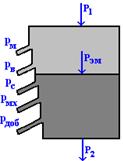
Рисунок 17
Потери в цепи якоря двигателя последовательного возбуждения состоят из потерь в сопротивлениях обмотки якоря rя, добавочных полюсов rд.п, последовательной обмотки rп.о и потерь в контакте щетки – коллектор ΔU:
 . (30)
. (30)
Потери в сопротивлении цепи возбуждения двигателя параллельного возбуждения
 . (31)
. (31)
Вращение сердечника якоря, обусловливает потери мощности в стали рс при перемагничивании: на гистерезис (потери пропорциональны частоте перемагничивания и наибольшей магнитной индукции в степени, близкой ко второй); на вихревые токи (потери пропорциональны частоте перемагничивания и магнитной индукции в квадрате). Двигатели параллельного возбуждения работают в большинстве случаев при малоизменяющихся скоростях вращения и магнитных потоках, поэтому эти потери можно считать неизменными. У двигателей с последовательным возбуждением произведение скорости вращения на магнитный поток остается примерно неизменным, что определяет некоторое уменьшение потерь при увеличении нагрузки. Вихревые токи и гистерезис оказывают тормозящее действие на якорь.
Механические потери рмх обусловлены трением вала якоря в подшипниках, трением щеток по коллектору при вращении, трением якоря в воздухе и вентиляционным действием при вращении якоря и вентилятора двигателя. Эти потери при малоизменяющейся скорости вращения остаются неизменными.
Добавочные потери рдоб принимаются равными 1% от мощности двигателя, в них учитываются различные трудноопределимые потери: потери в полюсных наконечниках, обусловленные пульсациями магнитного поля, и пр.
В потери холостого хода рх.х входят потери рс, рмх и рдоб:
 . (32)
. (32)
После вычитания из значения подводимой мощности Р1 потерь рм и рв получим электромагнитную мощность Рэм, передаваемую якорю, равную произведению электромагнитного момента Мэм на частоту вращения ω:
 . (33)
. (33)
Мощность на валу двигателя
 . (34)
. (34)
Дата: 2019-02-02, просмотров: 1089.