Акустическими методами НК называют методы контроля, основанные на применении упругих колебаний и волн, возбуждаемых или возникающих в контролируемом объекте. При проведении контроля в ультразвуковом диапазоне частот акустических колебаний, контроль называют ультразвуковым. Если ультразвуковой неразрушающий контроль входит в комплекс мероприятий технического диагностирования допускается применение термина ультразвуковое диагностирование.
Классификация методов.
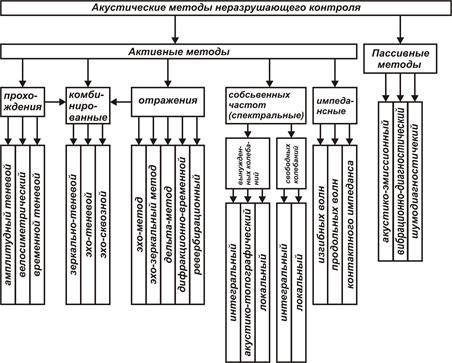
Известно много акустических методов неразрушающего контроля, некоторые из которых применяются в нескольких вариантах. Классификация акустических методов неразрушающего контроля показана на рисунке 3.14.
Акустические методы делят на две большие группы: использующие излучение и прием акустических колебаний и волн (активные методы) и основанные только на приеме колебаний и волн (пассивные методы).
Активные методы делят на методы прохождения, отражения, комбинированные (использующие как прохождение, так и отражение), импедансные и методы собственных частот.
Методы прохождения используют излучающие и приемные преобразователи, расположенные по разные стороны или по одну стороны контролируемого изделия. Применяют импульсное или (реже) непрерывное излучение и анализируют сигнал, прошедший через контролируемый объект.
|
| Рисунок 3.14 – Классификация акустических методов неразрушающего контроля |
Исторически методы прохождения применяли только для обнаружения несплошностей, меняющих параметры сквозного сигнала вследствие образования за дефектом акустической тени. Поэтому их называли «теневыми». Однако затем эти методы начали использовать для контроля прочности, пористости, структуры и других параметров материала, не связанных с наличием тени, поэтому теневой метод – частный случай метода прохождения.
К методам прохождения относят:
· Амплитудный теневой метод, основанный на регистрации уменьшения амплитуды волны, прошедшей через контролируемый объект, вследствие наличия в нем несплошности (рисунок 3.15, а).
· Временной теневой метод, базирующийся на регистрации запаздывания импульса, вызванного увеличением его пути в изделии при огибании несплошности (рисунок 3.15, б); тип волны при этом не меняется.
· Метод многократной тени. Он аналогичен амплитудному методу прохождения, но о наличии несплошности судят по амплитуде сквозного сигнала (теневого импульса), многократно (обычно двукратно) прошедшего между параллельными поверхностями изделия. Метод более чувствителен, чем теневой или зеркально теневой, так как волны проходят через дефектную зону несколько раз, но менее помехоустойчив.
|
| ||
| а) | б) | в) |
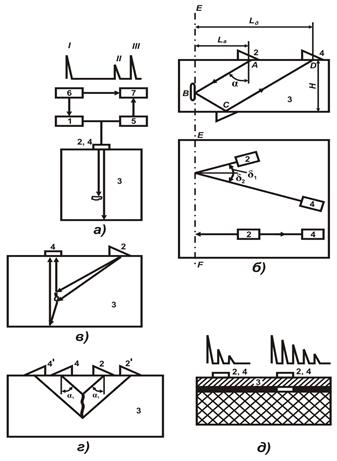
| Рисунок 3.15 – Методы прохождения: | ||
| а – теневой; б – временной теневой; в – велосиметрический; 1 – генератор; 2 – излучатель; 3 – объект контроля; 4 – приемник; 5 – усилитель; 6 – измеритель амплитуды; 7 – измеритель времени пробега; 8 – измеритель фазы | ||

· В фотоакустической микроскопии акустические колебания генерируются вследствие термоупругого эффекта при освещении образца модулированным световым потоком (например, импульсным лазером), сфокусированным на поверхности образца. Энергия светового потока, поглощаясь в материале, порождает тепловую волну, параметры которой зависят от теплофизических характеристик объекта контроля. Тепловая волна приводит к появлению термоупругих колебаний, которые регистрируются, например, одним пьезоэлектрическим детектором. Сканирование поверхности объекта контроля лучом лазера синхронизировано с разверткой экрана дисплея. Сканируя лучом поверхность исследуемого объекта, можно получить информацию о его однородности.
· Ультразвуковая реконструктивная томография – сквозное прозвучивание объекта контроля по разным направлениям с выявлением его особенностей, полученных при разных направлениях лучей.
· Метод лазерного детектирования – метод визуального представления акустических полей в твердых средах. Визуализация достигается путем наблюдения за смещением точек поверхности, вдоль которой распространяется ультразвуковая волна, с помощью лазерного интерферометра.
· Термоакустический метод контроля называют также ультразвуковой локальной термографией. Метод состоит в том, что в объект контроля вводятся мощные низкочастотные (около 20 кГц) ультразвуковые колебания. На несплошности происходит превращения ультразвуковых колебаний в тепло. Повышение температуры фиксируется термовизором. Ультразвуковые колебания моделированы по амплитуде частотой в несколько герц. Такую же модуляцию имеют и тепловые волны. Это существенно повышает возможность регистрации и локализации несплошностей.
· Велосиметрический метод, основанный на регистрации изменения скорости распространения дисперсионных мод упругих волн в зоне несплошности и применяемый при одностороннем и двустороннем доступе к контролируемому объекту (рисунок 3.15, в). В этом методе обычно используют преобразователи с сухим точечным контактном. В варианте с односторонним доступом (рисунок 3.15, в, верх) скорость возбуждаемой излучателем антисимметричной волны нулевого порядка (а0) в отделенном несплошностью слое меньше, чем в бездефектной зоне. При двухстороннем доступе (рисунок 3.15, в, внизу) в бездефектной зоне энергия передается продольной волной L, в зоне несплошности – волнами а0, которые проходят больший путь и распространяются с меньшими скоростями, чем продольная волна. Несплошности определяются по изменению фазы или увеличению времени прохождения (только в импульсном варианте) по контролируемому изделию.
В методах отражения используют как один, так и два преобразователя; применяют импульсное излучение. К этой подгруппе относят следующие методы контроля.
Эхо-метод (рисунок 3.16, а) основан на регистрации эхо-сигналов от дефектов. На экране индикатора обычно наблюдают посланный (зондирующий) импульс I, импульс III, отраженный от противоположной поверхности (дна) изделия (донный импульс) и эхо-сигнал от несплошности II. Время прихода импульсов II и III пропорционально расстоянию от поверхности ввода ультразвуковой волны до несплошности и толщине изделия. При совмещенной схеме контроля (рисунок 3.16, а) один и тот же преобразователь выполняет функцию излучателя и приемника. Если эти функции выполняют разные преобразователи то схему называют раздельной.
Когерентные методы отличаются от других методов отражения тем, что в качестве информативного параметра помимо амплитуды и времени прихода импульсом используется также фаза сигнала. Благодаря этому повышается на порядок разрешающая способность методов отражения и появляется возможность наблюдать изображения несплошностей, близкие к реальным. Наиболее эффективным когерентным методом является компьютерная акустическая голография.
Эхо-зеркальный метод основан на анализе сигналов, испытавших зеркальное отражение от донной поверхности изделия и несплошности, т.е. прошедших пут АВСD (рисунок 3.16, б). Вариант этого метода, рассчитанный на выявление вертикальных несплошностей в плоскости ЕF, называют методом тандем. Для его реализации при перемещении преобразователей А и D поддерживают постоянное значение Lа + L D = 2Нtgα; для получение зеркального отражения от невертикальных несплошностей значение Lа + L D варьируют.
Один из вариантов метода, называемый «косой тандем», предусматривает расположения излучателя и приемника не в одной плоскости (рисунок 3.16, б, вид в плане внизу), а в разных плоскостях, но таким образом, чтобы принимать зеркальное отражение от несплошности.
|
| Рисунок 3.16 – Методы отражения: |
| а – эхо; б – эхо-зеркальный; в – дифракционно-временной; г – реверберационный; 1 – генератор; 2 – излучатель; 3 – объект контроля; 4 – приемник; 5 – усилитель; 6 – синхронизатор; 7 – индикатор. |
Дельта-метод (рисунок 3.16, в) основан на приеме преобразователем для продольных волн 4, расположенным над несплошностью, рассеянных на несплошности волн, излученных преобразователем для поперечных волн 2.
Дифракционно-временной метод (рисунок 3.16, г), в котором излучатели 2 и 2', приемники 4 и 4’ излучают и принимают либо продольные, либо поперечные волны, причем могут излучать и принимать разные типы волн. Преобразователи располагают так, чтобы получать максимумы эхо-сигналов волн, дифрагированных на концах несплошности. Измеряют амплитуды и время прихода сигналов от верхнего и нижнего концов несплошности.
Реверберационный метод (рисунок 3.16, д) использует влияние несплошности на время затухания многократно отраженных ультразвуковых импульсов в контролируемом объекте. Например, при контроле клееной конструкции с наружным металлическим слоем и внутренним полимерным слоем дефект соединения препятствует передаче энергии во внутренний слой, что увеличивает время затухания многократных эхо-сигналов во внешнем слое. Отражение импульсов в полимерном слое обычно отсутствуют вследствие большого затухания ультразвуковой волны в полимере.
В комбинированных методах используют принципы, как прохождения, так и отражения акустических волн.
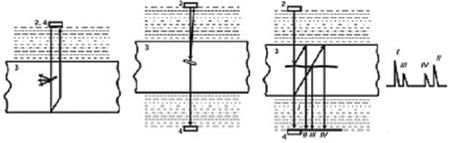
Зеркально-теневой метод основан на измерении амплитуды донного сигнала. На рисунке 3.17, а отраженный луч условно смещен в сторону. По технике выполнения (фиксируют эхо-сигнал) его относят к методам отражения, а по физической сущности контроля (измеряют ослабление сигнала, дважды прошедшего изделие в зоне несплошности) он близок к теневому методу.
Эхо-теневой метод основан на анализе как прошедших, так и отраженных волн (рисунок 3.17, б).
В эхо-сквозном методе (рисунок 3.17, в) фиксируют сквозной сигнал I, сигнал II, испытавший двукратное отражение в изделии, а в случае появления полупрозрачной несплошности – также сигналы III и IV, соответствующие отражениям волн от несплошности и испытавших также отражение от верхней и нижней поверхностей изделия. Большую непрозрачную несплошность обнаруживают по исчезновению или сильному уменьшению сигнала I, т.е. теневым методом, а также сигнала II. Полупрозрачные или небольшие несплошности обнаруживают по появлению сигналов III и IV, которые являются главными информационными сигналами.
Реверберационно-сквозной (акустико-ультразвуковой) метод сочетает признаки метода многократной тени и ультразвукового реверберационного метода. На объект контроля небольшой толщины на расстоянии порядка 20 см друг от друга устанавливают прямые излучающий и приемный преобразователи. Наличие в объекте контроля неоднородностей меняет условия прохождения импульсов.
|
| ||
| а) | б) | в) |
| Рисунок 3.17 – Комбинированные методы, использующие прохождение и отражение акустических волн: | ||
| а – зеркально-теневой; б – эхо-теневой; в – эхо-сквозной; 2 – излучатель; 4 – приемник; 3 – объект контроля | ||
Методы собственных частот основаны на измерении этих частот (или спектров) колебаний контролируемых объектов. Собственные частоты измеряют при возбуждении в изделиях как вынужденных, так и свободных колебаний. Свободные колебания обычно возбуждают механическим ударом, вынужденные – воздействием гармонической силы меняющейся частоты.
Различают интегральные и локальные методы. В интегральных методах анализируют собственные частоты изделия, колеблющегося как единое целое, в локальных – колебание отдельных его участков.
Методы собственных частот, использующие вынужденные колебания.
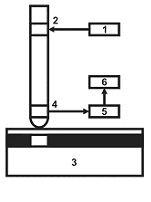
В интегральном методе генератор 1 (рисунок 3.18, а) регулируемой частоты соединен с излучателем 2, возбуждающем упругие колебания (обычно продольные или изгибные) в контролируемом изделии 3. Приемник 4 преобразует принятые колебания в электрический сигнал, который усиливается усилителем 5 и поступает на индикатор резонанса 6. Регулируя частоту генератора 1, измеряют собственные частоты изделия 3. Диапазон применяемых частот до 500 кГц.
|
| |||
| а) | б) | в) | г) |
| Рисунок 3.18 – Методы собственных частот | |||
| Методы колебаний: вынужденных (а – интегральный, б – локальный); свободных (в – интегральный, г – локальный): | |||
| 1 – генератор непрерывных колебаний меняющейся частоты; 2 – излучатель; 3 – объект контроля; 4 – приемник; 5 – усилитель; 6 – индикатор резонанса; 7 – модулятор частоты; 8 – индикатор; 9 – спектроанализатор; 10 – ударный вибратор; 11 – блок обработки информации. | |||
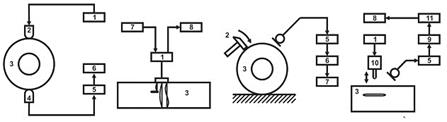
Локальный метод с использованием вынужденных колебаний известен как ультразвуковой резонансный метод. Его применяют в основном для измерения толщин. В стенке изделия 3 (рисунок 3.18, б) с помощью преобразователе 2, 4 (обычно это совмещенный преобразователь) возбуждают упругие волны (обычно продольные) непрерывно меняющейся частоты. Фиксируют частоты, на которых отмечаются резонансы системы преобразователь – изделие. По резонансным частотам определяют толщину стенки изделия и наличие в нем несплошностей.
Несплошности, параллельные поверхности, меняют измеряемую толщину, а расположенные под углом к поверхности приводят к исчезновению резонансов. Диапазон применяемых частот – до нескольких МГц.
Методы собственных частот, использующие свободные колебания, также делят на интегральные и локальные.
В интегральном методе в изделии 3 (рисунок 3.18, в) ударом молотка 2 возбуждают свободно затухающие колебания. Эти колебания принимают микрофоном 4, усиливают усилителем 5 и фильтруют полосовым фильтром 6, пропускающим только сигналы с частотами, соответствующими выбранной моде колебаний. Частоту измеряют частотомером 7. Признаком дефекта служит изменение (обычно снижение) частоты. Как правило, используют основные собственные частоты, не превышающие 15 кГц.
В локальном методе (рисунок 3.18, г) возбуждаемый генератором 1 вибратор 10 создает периодические удары по контролируемому изделию. Электрические сигналы с приемного микрофона 4 через усилитель 5 поступают на спектроанализатор 9. Выделенный последним спектр принятого сигнала обрабатывается решающим устройством 11, результат обработки появляется на индикаторе. Кроме микрофонов применяются пьезоэлектрические приемники.
Дефекты регистрируют по изменению спектра принятого импульсного сигнала. В отличие от интегрального метода контроль выполняется путем сканирования изделия. Обычный диапазон рабочих частот от 0,3 до 20 кГц.
Акустико-топографический метод имеет признаки интегрального и локального методов. Он основан на возбуждении в изделии интенсивных изгибных колебаний непрерывно меняющейся частоты и регистрации распределения амплитуд колебаний с помощью наносимого на поверхность порошка. Упругие колебания возбуждают преобразователем, прижимаемым к сухому изделию. Преобразователь питают от мощного (порядка 0,4 кВт) генератора непрерывно меняющейся частоты. Если собственная частота отделенной несплошностью (расслоением, нарушением соединения) зоны попадает в диапазон возбуждаемых частот, колебания этой зоны усиливаются, покрываемый ее порошок смещается и концентрируется по границам несплошностей, делая их видимыми. Диапазон используемых частот от 40 до 150 кГц.
Импедансные методы используют зависимость импедансов изделий при их упругих колебаниях от параметров этих изделий и наличия в них несплошностей. Обычно оценивают механический импеданс  , где
, где  и
и  – комплексные амплитуды возмущающей силы и колебательной скорости соответственно. В отличие от характеристического импеданса ρс, являющимся параметром среды, механический импеданс характеризирует конструкцию. В импедансных методах используют изгибные и продольные волны.
– комплексные амплитуды возмущающей силы и колебательной скорости соответственно. В отличие от характеристического импеданса ρс, являющимся параметром среды, механический импеданс характеризирует конструкцию. В импедансных методах используют изгибные и продольные волны.
При использовании изгибных волн преобразователь стержневого типа (рисунок 3.19) содержит соединенный с генератором 1 излучающий 2 и приемный 4 пьезоэлектрические элементы. Через сухой точечный контакт преобразователь возбуждает в изделии 3 гармонические изгибные колебания. В зоне несплошности соединения модуль |Z| механического импеданса Z=|Z|e jφ уменьшается и меняет его аргумент φ. Эти изменения регистрируют электронной аппаратурой. В импульсном варианте этого метода в системе преобразователь – изделие возбуждают импульсы свободно затухающих колебаний. Признаком несплошности служит уменьшение амплитуды и несущей частоты этих колебаний.
|
| Рисунок 3.19 – Импедансный метод |
| 1 – генератор; 2 – излучатель; 3 – объект контроля; 4 – приемник; 5 – усилитель; 6 – блок обработки информации с индикатором. |
Кроме совмещенного преобразователя, применяют раздельно-совмещенные преобразователи, имеющие в общем корпусе раздельные излучающий и приемный вибраторы. Эти преобразователи работают в импульсном режиме. При работе совмещенными преобразователями используют частоты до 8 кГц, раздельно-совмещенными – импульсы с несущими частотами 15 – 35 кГц.
В другом варианте в контролируемой многослойной конструкции с помощью плоского пьезоэлектрического преобразователя возбуждают продольные упругие волны фиксированной частоты. Несплошности регистрируют по изменению входного электрического импеданса Z, пьезоэлектрического преобразователя. Импеданс Z, определяется входным акустическим импедансом контролируемой конструкции, зависящий от наличия и глубины залегания несплошности соединения между ее элементами. Изменения Z, представляют в виде точки на комплексной плоскости, положение которой зависит от характера несплошности. В отличие от методов, использующих изгибные волны, преобразователь контактирует с изделием через слой контактной смазки.
Пассивные акустические методы основаны на анализе упругих колебаний волн, возникающих в самом контролируемом объекте.
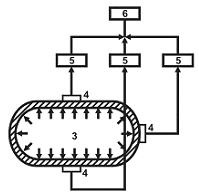
Наиболее характерным пассивным методом является акустико-эмиссионный метод (рисунок 3.20). Явление акустической эмиссии состоит в том, что упругие волны излучаются самим материалом в результате внутренней динамической локальной перестройки его структуры. Такие явления, как возникновение и развитие трещин под влиянием внешней нагрузки, аллотропические превращения при нагреве или охлаждении, движение скоплений дислокаций – наиболее характерные источники акустической эмиссии. Контактирующие с изделием пьезоэлектрические преобразователи принимают упругие волны и позволяют установить место их источника (дефекта).
|
| Рисунок 3.20 – Акустико-эмиссионный метод |
| 1 – генератор; 2 – излучатель; 3 – объект контроля; 4 – приемник; 5 – усилитель; 6 – блок обработки информации с индикатором. |
Пассивными акустическими методами являются вибрационно-диагностический и шумодиагностический. При первом анализируют параметры вибраций какой-либо отдельной детали или узла (ротора, подшипников, лопатки турбины) с помощью приемников контактного типа, при втором изучают спектр шумов работающего механизма, обычно с помощью микрофонных приемников.
Физические основы ультразвукового диагностирования
Природа ультразвука
Ультразвук – упругие колебания и волны высокочастотной части спектра акустических волн. Как известно, в зависимости от частоты упругие волны подразделяют на инфразвуковые (с частотой до 20 Гц), звуковые (от 20 до 2×104 Гц), ультразвуковые (от 2×104 до 109 Гц) и гиперзвуковые (свыше 109 Гц). Акустические (упругие) волны – распространяющиеся в упругой среде механические возмущения (деформации). Упругие волны могут возникать в любой среде – твердой, жидкой и газообразной. Возмущения от источника передаются частицам среды, которые также начинают колебаться относительно своей точки равновесия. Эти колебания передаются соседним частицам, которые также начинают колебаться, затем колебания передаются все новым и новым частицам и в среде возникает упругая волна. Пространство, в котором распространяются упругие волны, – звуковое или акустическое поле. Упругие волны характеризуются следующими параметрами: длиной волны l, частотой f и скоростью распространения c, которые связаны зависимостью:

| (3.5) |
В зависимости от упругих свойств среды в ней могут возникать упругие волны различных видов, отличающиеся направлением смещения колеблющихся частиц. В связи с этим различаются продольные, сдвиговые, поверхностные, нормальные и другие волны.
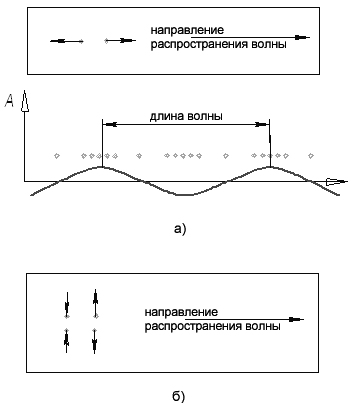
Если колебания частиц среды совпадают с направлением распространения волны, то волна называется продольной (рисунок 3.21, а). Такая волна может быть возбуждена в твердом теле, жидкой и газообразной средах. Если колебания частиц среды перпендикулярны направлению распространения волны, то волна называется сдвиговой (поперечной) (рисунок 3.21, б). Она может быть возбуждена только в твердом теле, которое способно упруго сопротивляться деформации сдвига. Продольные и поперечные волны могут возникать в чистом виде только в неограниченной среде или в теле, размеры которого во всех направлениях значительно превышают длину волны. На свободной поверхности твердого тела можно возбудить поверхностные волны.
|
| Рисунок 3.21 – Ультразвуковые волны: |
| а – продольная волна; б – поперечная (сдвиговая) волна |
В таблице 3.2. представлены справочные данные скоростей распространения ультразвуковых волн в различных материалах.
Таблица 3.2 – Скорости распространения ультразвуковых волн в различных материалах
| Материал | Скорость распространения волн с, 1·103 м/с | ||
| продольных | поперечных | поверхностных | |
| Металлы и сплавы | |||
| Алюминий | 6,36 | 3,13 | 2,9 |
| Бронза | 3,5 – 3,8 | 2,3 – 2,5 | 2,1 – 2,3 |
| Вольфрам | 5,32 | 2,7 | 2,65 |
| Дюралюминий | 6,25 – 6,35 | 3,0 – 3,2 | 2,8 – 3,0 |
| Железо | 5,91 | 3,23 | 3,0 |
| Золото | 3,24 | 1,2 | 1,12 |
| Латунь | 4,43 | 2,12 | 1,95 |
| Магний | 5,77 | 3,05 | 2,875 |
| Медь | 4,72 | 2,44 | 2,26 |
| Молибден | 6,29 | 3,35 | 3,11 |
| Никель | 5,63 | 2,96 | 2,64 |
| Олово | 3,32 | 1,67 | 1,56 |
| Платина | 3,96 | 1,67 | 1,57 |
| Серебро | 3,6 | 1,59 | 1,48 |
| Сталь углеродистая | 5,9 – 5,94 | 3,22 – 3,25 | 3,0 |
| Сталь коррозионно-стойкая | 5,66 – 6,14 | 3,12 – 3,25 | 3,1 |
| Титан | 6,1 | 3,13 | 2,91 |
| Чугун | 3,5 – 5,6 | 2,2 – 3,2 | – |
| Неметаллы | |||
| Бетон | 2,1 – 5,2 | – | – |
| Капрон | 2,64 | – | – |
| Нейлон, перлон | 1,8 – 2,2 | – | – |
| Полистирол | 2,37 | 1,12 | 1,04 |
| Смола акриловая | 2,67 | 1,12 | – |
| Стекло оконное | 5,7 | 3,4 | 3,1 |
| Стекло органическое | 2,65 – 2,75 | 1,12 – 1,13 | 1,05 |
| Текстолит | 2,63 | – | – |
| Фарфор | 5,3 – 5,35 | 3,5 – 3,7 | – |
| Фторопласт | 1,35 | – | – |
| Эбонит | 2,4 | – | – |
| Эпоксидная смола твердая | 2,5 – 2,8 | 1,1 | – |
Генерирование ультразвуковых волн
В практике ультразвуковой дефектоскопии металлов применяются ультразвуковые колебания частотой от 0.5-0.8 до 10.0 МГц. Для получения ультразвука таких частот используются пьезоэлектрические, магнитострикционные, электромагнитно-акустические и другие преобразователи. Наибольшее распространение получили пьезоэлектрические преобразователи, в которых активным элементом являются пьезоэлементы, изготовленные из монокристалла кварца или пьезокерамических материалов – титаната бария, цирконат-титаната свинца и других. На поверхности пьезоэлементов наносят слои серебра, служащие электродами. При подведении к электродам переменного электрического напряжения пьезоэлемент совершает вынужденные механические колебания (растягивается и сжимается) с частотой электрического напряжения (обратный пьезоэффект). При воздействии на пьезоэлемент упругих механических колебаний на его электродах возникает переменное электрическое напряжение с частотой воздействующих механических колебаний (прямой пьезоэффект). Амплитуда колебаний пьезоэлемента зависит от напряжения на электродах и соотношения частоты переменного напряжения и собственной частоты колебаний пьезоэлемента, максимальная амплитуда будет при резонансе, когда собственная частота его колебаний совпадает с частотой возбуждающего переменного напряжения.
Подавая на пьезоэлемент переменное напряжение с частотой, отличной от собственной частоты колебаний, можно получить вынужденные колебания пьезоэлемента с любой частотой. Однако в этом случае излучаемая энергия будет меньше, чем при резонансной частоте.
Основными характеристиками пьезоэлемента являются частотный спектр, излучаемая мощность звука, направленность излучения.
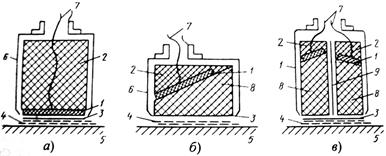
Конструкции основных типов пьезоэлектрических преобразователей представлены на рисунке 3.22: прямой (рисунок 3.22, а), наклонный (рисунок 3.22, б) и раздельно-совмещенный (рисунок 3.22, в).
|
| Рисунок 3.22 – Конструкция пьезоэлектрических преобразователей: |
| а – прямого; б – наклонного; в – раздельно-совмещенного; 1 – пьезопластина; 2 – демпфер; 3 – протектор; 4 – контактная жидкость; 5 – объект контроля; 6 – корпус преобразователя; 7 – выводы; 8 – призма. |
Фото пьезоэлектрических преобразователей различных типов представлено на рисунке 3.23.

|
| Рисунок 3.23 – Фото пьезоэлектрических преобразователей различных типов |
Рассмотрим более подробно назначение некоторых элементов пьезоэлектрических преобразователей:
§ пьезоэлектрический элемент – предназначен для возбуждения и приема упругих колебаний, обычно имеет толщину равную половине длины волны в пьезоэлектрическом материале. На противоположных поверхностях пьезоэлектрического элемента нанесены металлические (обычно серебряные) электроды для приложения электрического поля;
§ демпфер – предназначен для гашения свободных колебаний пьезоэлектрического элемента, то есть получения коротких импульсов, а также для предотвращения механических повреждений пьезоэлектрических элементов (особенно тонких). Его состав и форма должны обеспечивать полное затухание и отвод упругих колебаний, излучаемых пьезоэлектрическим элементом в материал демпфера без многократных отражений;
§ протектор – предназначен для защиты пьезоэлектрического элемента от механических повреждений и износа при сканировании объекта контроля;
§ выводы – предназначены для подачи на пьезоэлектрический элемент от генератора дефектоскопа электрического тока (при излучении колебаний) и подачи от пьезоэлектрического элемента электрического тока на приемно-усилительный тракт дефектоскопа (при приеме колебаний);
§ корпус преобразователя – обязан обеспечивать прочность конструкции преобразователя, а также экранирование пьезоэлектрического элемента и выводов от электромагнитных помех. С учетом последнего корпуса из пластмасс металлизируются;
§ призма преобразователя – предназначена для ввода акустических колебаний в объект контроля под углом;
§ акустический экран – в раздельно-совмещенном преобразователе предназначен для предотвращения прямой передачи акустических сигналов от излучающего пьезоэлектрического элемента к приемному, минуя объект контроля.
Основные характеристики пьезоэлектрических материалов
Пьезоэлектрические материалы – материалы, обладающие пьезоэффектом, используются для изготовления пьезоэлектрических элементов (пьезопластин), служащих в преобразователях для преобразования электрических колебаний в упругие и наоборот.
В неразрушающем контроле в подавляющем большинстве случаев применяют пьезопластины, поляризованные по толщине. Для простоты в таблице 3.2 приведены характеристики пластин из пьезоэлектрических материалов представленные как скалярные величины, хотя в действительности они являются компонентами тензоров.
Максимальная эффективность преобразования при излучении и приеме упругих волн обычно соответствует полуволновой толщине пьезопластины:
| (3.6) | |
| где λ1 – длина упругой волны в пьезоэлектрическом материале; с1 – скорость звука в пьезоэлектрическом материале. | ||
В таблице 3.3 скорость звука с приведена для безграничного тела при постоянной напряженности электрического поля.
Плотность ρ1 и вычисляемый через нее характеристический импеданс z1= ρ1c1 используют в расчетах по согласованию пьезоэлектрического элемента со средой, куда излучается ультразвук.
Диэлектрическая проницаемость ε нужна для расчета емкости пьезопластины как плоского конденсатора:

| (3.7) | |
| где ε0=8,85´1012 Ф/м – диэлектрическая проницаемость вакуума; S – площадь пьезопластины. | ||
Коэффициент электромеханической связи b – наиболее полная общая энергетическая характеристика пьезоэлектрика. Полная энергия W деформированного пьезоэлектрика определяется суммой:

| (3.8) | |
| где WЕ – энергия электрического поля; WM – энергия, запасенная в механической форме. | ||
Таблица 3.3 – Технические характеристики пьезоэлектрических материалов
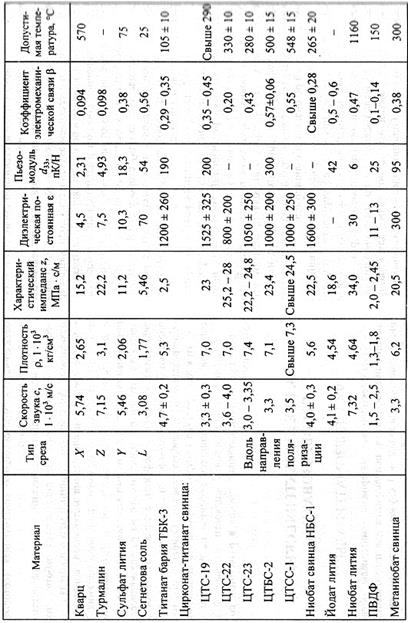
Коэффициент b показывает, какая часть общей энергии пьезоэлектрика преобразуется в механическую или электрическую форму:

| (3.9) |
Значение b, зависящее от материала и моды колебаний пьезоэлектрического преобразователя, определяет эффективность его работы в режимах излучения и приема упругих колебаний.
Допустимая температура пьезоэлектрического элемента на 20 … 500С ниже температуры аллотропических превращений для кварца, точек Кюри для пьезокерамик, температуры размягчения для ПВДФ.
Максимально допустимое электрическое напряжение U max зависит от электрической прочности пьезоэлектрического материала, определяемой напряженностью максимального электрического поля:
| (3.10) |
Для ЦТС-19 Emax=3000 В/мм. Однако уже при 0,3Emax наблюдается непропорционально замедленный рост амплитуды акустического сигнала с ростом электрического напряжения.
Из пьезоэлектрических материалов наибольшее применение получила пьезокерамика цирконат-титанат свинца (ЦТС). Кварц применяют, если необходимо обеспечить высокостабильные изменения. Метаниобад свинца имеет низкую механическую добротность, и его можно применять без демпфера. Кроме того, у него очень малы радиальные колебания, являющиеся источниками помех. Ниобат лития имеет высокую температуру точки Кюри (11600С).
Поливинилденфторид (ПВДФ) – это эластичная полимерная пленка. Ей можно придавать практически любую форму. У нее небольшое удельное волновое сопротивление, что облегчает согласование с иммерсионной жидкостью. Радиальные колебания близки к нулю, механическая добротность очень низкая. Существуют пленки на очень высокие частоты (до 100 МГц).
Распространение ультразвуковых волн
Распространение ультразвуковых волн происходит по законам геометрической (лучевой) акустики.
Поле излучения преобразователя определяется амплитудой давления, которое создается преобразователем и действует на точечный приемник, расположенный в случайной точке пространства перед преобразователем.
Поле излучения-приема преобразователя характеризуется средним значением амплитуды акустического сигнала на приемном преобразователе, который появляется в результате отражения излучения того же преобразователя от точечного рефлектора, помещенного в некоторой точке пространства перед преобразователем и рассеивающего падающие волны равномерно по всем направлениям. Оно пропорционально квадрату поля излучения.
Акустической осью прямого преобразователя называют перпендикуляр к его излучающей (приемной) поверхности, расположенный в геометрическом центре или центре тяжести площади пьезоэлектрического элемента. На достаточно большом расстоянии от преобразователя при равномерном синфазном излучении звука всеми точками его поверхности акустическая ось совпадает с направлением максимума поля излучения, имеющего название центрального луча.
Ближняя зона (зона Френеля, зона неравномерной чувствительности) преобразователя – область, расположенная возле поверхности преобразователя, в которой акустическое поле изменяется немонотонно при изменении расстояния от преобразователя вдоль акустической оси. В ближней зоне больше чем 80% энергии излучения находится в границах цилиндра, ограниченного краями преобразователя, однако по сечению цилиндра энергия распределена неравномерно.
Дальняя зона (зона Фраунгофера) преобразователя – область, в которой акустическое поле монотонно изменяется с увеличением расстояния от преобразователя вдоль акустической оси. В дальней зоне поле имеет вид лучей, выходящих из центра преобразователя. В дальней зоне акустическое поле преобразователя расходится на угол 2θ.
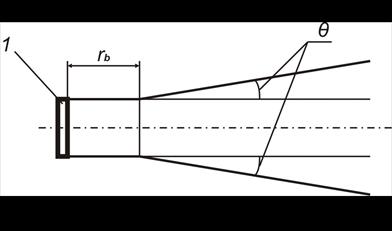
Схема распространения ультразвуковой волны дискового излучателя представлена на рисунке 3.24.
|
| Рисунок 3.24 – Схема распространения ультразвуковой волны дискового излучателя: |
| 1 – пьезоэлемент; rb – ближняя зона (зона Френеля), θ – угол расхождения |
Угол расхождения θ дискообразного преобразователя может быть определен по формуле:
| (3.11) | |
| где D – диаметр пьезоэлектрического элемента. | ||
Длина ближней зоны (зоны Френеля) для дискообразного преобразователя может быть определена по формуле:

| (3.12) | |
| где а – радиус пьезоэлектрического элемента. | ||
Длина ближней зоны для прямоугольного преобразователя со сторонами 2а1 и 2а2 может быть определена по формуле:

| (3.13) |
По мере удаления от излучателя амплитуда колебаний частиц постепенно убывает. Это обусловлено геометрическим расхождением лучей, что приводит к увеличению площади фронта волны, а также наличием потерь в среде, приводящих к постепенному затуханию колебаний при их распространении. Затухание ультразвуковых колебаний происходит по экспоненциальному закону:

| (3.14) | |
| где Р – амплитуда волны в некоторой точке пространства перед преобразователем; Р0 – амплитуда излученной волны; х – расстояние пройденное волной; δ – коэффициент затухания. | ||
Коэффициенты затухания различны для различных материалов и складываются из коэффициентов поглощения и рассеяния: d = dпог+ dрас. В однородной упругой изотропной среде и в монокристаллах металлов затухание определяется поглощением ультразвука. При этом энергия упругих колебаний переходит в тепловую. В поликристаллических материалах, обладающих упругой анизотропией, затухание определяется рассеянием упругих колебаний зернами материала и поглощением, причем основную роль в затухании играет именно рассеяние. Это приводит к дополнительному уменьшению интенсивности волн в направлении их распространения.
При распространении упругих волн в металлах возможна реверберация – постепенное затухание колебаний, обусловленное повторными отражениями. Реверберация может быть объемной (из-за многократного отражения колебаний от поверхностей, ограничивающих контролируемое изделие) и структурной (из-за многократного отражения и рассеяния колебаний границами зерен металла). Возникновение структурной реверберации может быть объяснено анизотропией упругих свойств зерен металла, благодаря чему ультразвук при переходе из одного зерна в другое претерпевает отражение на их границах, преломление при переходе через границы и постепенное рассеяние во все стороны.
Отражение и преломление ультразвуковых волн
на границе раздела двух сред
Законы отражения и преломления ультразвуковых волн аналогичны законам геометрической акустики. Если продольная волна, распространяющаяся в некоторой среде I, встречает на своем пути среду II с другими акустическими свойствами, то часть энергии отражается от границы раздела в первой среде, а оставшаяся часть проходит в новую среду. При этом отраженные волны распространяются от границы раздела в первой среде, а прошедшие – во второй. Пусть плоская упругая продольная волна, распространяясь со скоростью C I в однородной среде с плотностью r I , доходит до границы со второй средой с плотностью r II и скоростью распространения C II. Условимся углом падения ультразвукового луча называть угол, образованный лучом и нормалью к поверхности в точке падения луча.
Если упругая волна падает перпендикулярно на плоскую границу раздела двух сред (a=0), то часть ее энергии переходит во вторую среду, а часть отражается в первую, причем проходящая и отраженная волны будут того же вида, что и волна падающая, и направлены также перпендикулярно к границе раздела. Распределение энергии между отраженной и прошедшей волнами определяется коэффициентами отражения и прохождения.
Коэффициентом отражения R называется отношение интенсивностей отраженной и падающей волн.
Для рассматриваемого случая:
| (3.15) | |
| где r I CI ( zI) и r II CII ( zII) – удельные акустические сопротивления I и II сред. | ||
Коэффициентом прохождения D называется отношение интенсивностей прошедшей и падающей волн. Так как сумма коэффициентов отражения и прохождения при нормальном падении равна 1, то коэффициент прохождения можно определить из уравнения:

| (3.16) |
При падении упругой волны наклонно под углом к границе раздела двух сред происходит ее отражение, преломление и разложение. Возникают две преломленные волны (продольная CL2 и поперечная Ct2) и две отраженные (CL1 и Ct1). Углы преломления и отражения связаны с углом падения и зависят от скоростей соответствующих волн в данных средах (рисунок 3.25). Эту зависимость называют законом Снеллиуса. Записанная только для преломленных волн эта зависимость имеет вид:
| (3.17) |
При увеличении угла падения β углы прошедших волн α L,и α t также увеличиваются. При этом сначала возможно исчезновение во второй среде сначала продольной волны, а потом и поперечной. Углы β, соответствующие исчезновению продольной, а затем поперечной волны во второй среде, называют соответственно первым и вторым критическими углами.

| 
|
| а) | б) |
|
| |
| в) | |
| Рисунок 3.25 – Трансформация ультразвуковых волн при их преломлении: | |
| а – общая схема. Схемы б и в – соответствуют первому и второму критическим углам; z1, z2 – акустические сопротивления первой и второй среды соответственно | |

Сущность ультразвукового контроля эхо-методом
Ультразвуковой импульсный эхо-метод является наиболее распространенным акустическим методом контроля изделий на отсутствие внутренних недопустимых несплошностей. Это обусловлено тем, что:
§ эхо-метод имеет наибольшую чувствительность и помехоустойчивость;
§ эхо-метод обладает хорошей разрешающей способностью;
§ эхо-метод позволяет проводить контроль при одностороннем доступе к объекту контроля;
§ аппаратура эхо-метода имеет небольшие размеры и мобильна.
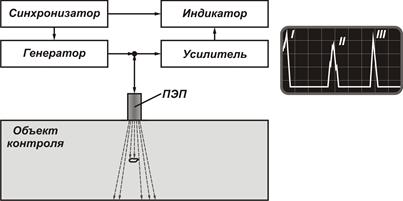
Схема контроля ультразвуковым импульсным эхо-методом представлена на рисунке 3.26.
|
| Рисунок 3.26 – Схема контроля ультразвуковым импульсным эхо-методом |
На экране индикатора обычно наблюдают посланный (зондирующий) импульс I, импульс III, отраженный от противоположной поверхности (дна) изделия (донный импульс) и эхо-сигнал от несплошности II. Время прихода импульсов II и III пропорционально глубине залегания несплошности и толщине изделия. При совмещенной схеме контроля один и тот же преобразователь выполняет функцию излучателя и приемника. Если эти функции выполняют разные преобразователи, то схему называют раздельной.
Для контроля эхо-методом применяются ультразвуковые импульсные дефектоскопы. На рисунке 3.27 представлены некоторые типы современных ультразвуковых импульсных дефектоскопов.
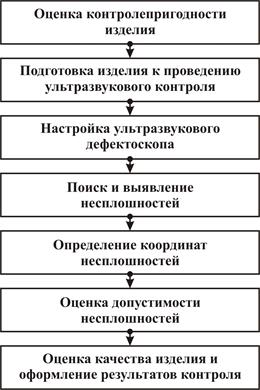
Технологический процесс ультразвукового контроля включает в себя следующие последовательно выполняемые операции – рисунок 3.28.

|
| Рисунок 3.27 – Ультразвуковые импульсные дефектоскопы: |
|
| Рисунок 3.28 – Технология ультразвукового контроля эхо-методом |
Операции настройки, поиска, обнаружения, измерения и оценки несплошностей объединяется термином «Методика контроля». Описание технологического процесса оформляется в виде инструкции, которая является рабочим документом специалиста проводящего контроль. Кроме методических приемов и технологических операций, в инструкцию включаются общие положения, регламентирующие организацию контроля, его технические возможности, требования к квалификации персонала, основные правила метрологической поверки аппаратуры, меры безопасности.
Дата: 2018-12-28, просмотров: 574.