Билет №1
1. Время ускорения и замедления электропривода
Время переходных режимов привода: пуска, торможения, перехода от одной скорости к другой влияет на производительность механизма. Определение времени переходных процессов основано на интегрировании уравнения движения привода (4.3). Разделяя переменные, получаем:
 .
.
Время, необходимое для изменения скорости привода от  до
до  :
:
 (4.4)
(4.4)
Для решения этого интеграла необходимо знать зависимости моментов двигателя и механизма от скорости. В простейшем случае, приняв М=const, Мс=const и I=const, получим:
 .
.
Этим уравнением можно воспользоваться, например, для расчета времени пуска привода. Если значение момента двигателя во время пуска обозначить через М , как это показано на рис.4.1, то получим следующее выражение для времени пуска из состояния покоя до конечной скорости  , соответствующей заданному моменту сопротивления:
, соответствующей заданному моменту сопротивления:
 .
.
 |  | ||
.
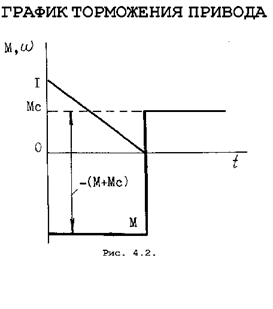
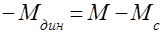
В тех случаях, когда динамический момент имеет отрицательное значение, привод замедляется. Как указывалось выше, для такого случая уравнение моментов будет иметь вид:
 .
.
Очевидно, привод замедляется и в том случае, когда двигатель развивает положительный момент, по абсолютному значению меньше момента сопротивления.
Из последнего уравнения следует, что время торможения:
 .
.
Полагая в частном случае М=const, Мс=const и I=const, получим:
 .
.
Пользуясь этим уравнением, можно рассчитать время торможения 
Билет №2
1. Типы электроприводов и движения осуществляемые ими. Структурная схема автоматизированного электропривода
Приводом называется совокупность механизмов, передающих движение от источника энергии (двигателя) до элемента выполняющего заданное движение станка, т.е. к рабочим или, иначе говоря, исполнительным органам станка.
Электропривод различается:
1) по видам движения:
- вращательный-; электродвигательным устройством является вращающийся двигатель
- поступательный;
- ударный;
- вибрационный;
- дискретный ( вращательный и поступательный );
2) по видам передаточных устройств:
- без редукторный;
- редукторный, с электромагнитной дисковой муфтой, электромагнитной муфтой скольжения, гидромуфтой;
3) по роду тока двигателя:
- постоянного тока;
- переменного тока;
4) по видам преобразовательных устройств:
- с машинным преобразователем;
- со статическим преобразователем;
5) по режиму работы:
- длительный;
- кратковременный;
- повторно-кратковременный;
6) по степени управляемости:
- нерегулируемый – параметры привода не регулируются и могут изменяться только в результате возмущающих воздействий;
- регулируемый – параметры привода могут изменяться под воздействием управляющего устройства;
- программно-управляемый – управляемый в соответствии с заданной программой;
- следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определённой точностью в соответствии с произвольно меняющимся задающим сигналом;
- адаптивный – автоматически избирающий структуру и параметры системы управления при изменении условий работы машины с целью выработки оптимального режима;
7) по уровню автоматизации:
- неавтоматизированный – в котором управление ручное;
- автоматизированный – управляемый автоматическим регулированием параметров;
- автоматический – в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
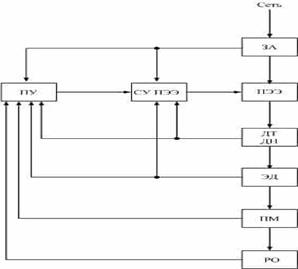
ЗА – ЗАЩИТНАЯ АППАРАТУРА (АВТОМАТИЧЕСКИЕ ВЫКЛЮЧАТЕЛИ, ПРЕДОХРАНИТЕЛИ И ПР.)
ПЭЭ – ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ (ЧАСТОТНИК, ТИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ)
ДТ – ТОКОВЫЙ ДАТЧИК
ДН – ДАТЧИК НАПРЯЖЕНИЯ
СУ ПЭЭ – СИСТЕМА УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ
ПУ – ПУЛЬТ УПРАВЛЕНИЯ
ПМ – ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ (МУФТА, РЕДУКТОР И ПР.)
РО – РАБОЧИЙ ОРГАН
ЭД — ЭЛЕКТРОДВИГАТЕЛЬ
При такой структуре управления СУ ПЭЭ управляет не только преобразователем, но и всей системой сразу. При таком управлении датчики обратной связи обеспечивают контроль за параметрами и сигнализируют об этом оператору. Данная система в автоматическом режиме может проводить некоторые операции (пуск, останов и пр.), но все равно требуется присутствие человека, для контроля, за работой данного устройства.
Билет №3
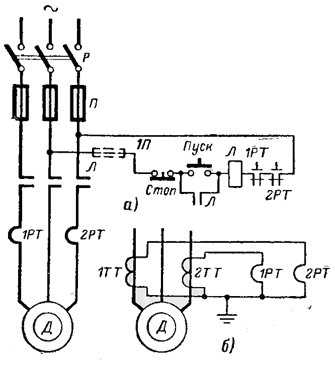
1. Схема управления работой двух АД, исключающая их одновременную работу с тепловой защитой
Билет №4
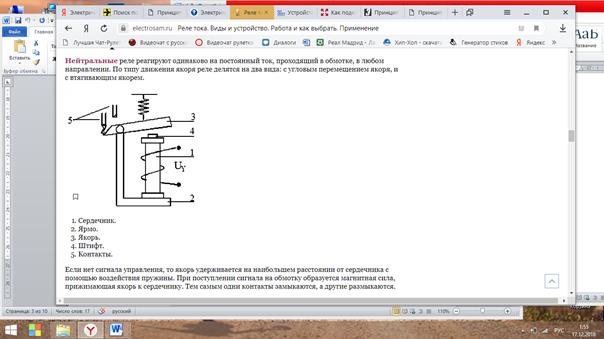
1. Тепловая защита АД. Электрическая схема
Тепловое реле является альтернативным способом защиты электродвигателя с определённой инерцией срабатывания. Принцип действия основан на использовании биметаллической пластины, которая нагревается током обмоток двигателя. Деформация пластины приводит к срабатыванию контактов, необходимых для отключения движка.
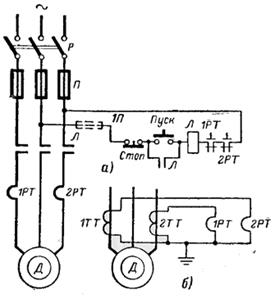
Надёжность такой защиты зависит от подобия тепловых процессов в реле и в двигателе. Такое возможно только при достаточно длительном перерыве между включениями и выключениями движка. Условия окружающей среды для двигателя и для элементов тепловой защиты должны быть одинаковыми.
Скорость срабатывания тепловых реле тем меньше, чем больше ток, протекающий через нагревательные элементы или же саму пластину в зависимости от конструкции. При больших значениях токов в обмотках асинхронного двигателя подключение выполняется с использованием трансформаторов тока. Существуют модели магнитных пускателей со встроенными в них тепловыми реле.
Основными электрическими параметрами являются
· номинальное напряжение. Это максимальное напряжение в сети допустимое для использования реле.
· Номинальный ток, при котором реле работает длительно и не срабатывает при этом.
Тепловая защита не способна реагировать на токи короткого замыкания и недопустимые кратковременные перегрузки. Поэтому её надо использовать совместно хотя бы с плавкими предохранителями.
Более совершенной разновидностью защиты электродвигателя от недопустимого нагрева является схема с использованием специального датчика тепла. Такой тепловой сенсор располагается на самом движке в том или ином месте. Некоторые модели двигателей имеют встроенный биметаллический сенсор – контакт, подключаемый к защите.
Билет №5
1. Уравнение движения электропривода
В общем виде уравнение движения привода может быть записано следующим образом:
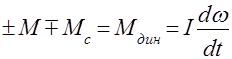 (4.3)
(4.3)
Выбор знаков перед значениями моментов в (4.3) зависит от режима работы двигателя и характера моментов сопротивления. Если эти моменты направлены в ту же сторону, что и вращение, то они считаются положительными, а если в обратную, то - отрицательными. Электромагнитный момент М двигателя со знаком "+" означает, что двигатель работает в двигательном режиме и вращение происходит под действием электродвигателя. Момент М со знаком "-" означает, что двигатель работает в тормозном (генераторном) режиме, т.е. его электромагнитный момент препятствует движению.
Реактивный статический момент сопротивления всегда отрицателен, так как силы трения всегда направлены против движения. Активный момент может быть и положительным, и отрицательным (см. рис.2.1, б).
Примеры основного уравнения электропривода:
 . Уравнение соответствует работе двигателя в двигательном режиме (+М) с замедлением (-Мдин); при этом момент сопротивления может быть активным или реактивным, и направлен против вращения (-Мс). В таком режиме работают: токарный станок в момент увеличения глубины резания или подачи, транспортерная лента при увеличении количества грузов на ней и т.д.
. Уравнение соответствует работе двигателя в двигательном режиме (+М) с замедлением (-Мдин); при этом момент сопротивления может быть активным или реактивным, и направлен против вращения (-Мс). В таком режиме работают: токарный станок в момент увеличения глубины резания или подачи, транспортерная лента при увеличении количества грузов на ней и т.д.
 . Уравнение соответствует работе электропривода с ускорением при уменьшении нагрузки в тех же механизмах.
. Уравнение соответствует работе электропривода с ускорением при уменьшении нагрузки в тех же механизмах.
 . Уравнение соответствует работе двигателя в тормозном режиме (-М), но электропривод вращается с ускорением (+Мдин). Это может быть только под действием статического момента сопротивления, направленного в сторону вращения (+Мс). Например, при спуске груза, когда во время работы двигателя на подъем трос все же разматывается под действием очень тяжелого груза.
. Уравнение соответствует работе двигателя в тормозном режиме (-М), но электропривод вращается с ускорением (+Мдин). Это может быть только под действием статического момента сопротивления, направленного в сторону вращения (+Мс). Например, при спуске груза, когда во время работы двигателя на подъем трос все же разматывается под действием очень тяжелого груза.
 . Уравнение соответствует замедлению (-Мдин) при тормозном режиме двигателя (-М) и статическом моменте, препятствующем движению (-Мс). Так движется по инерции электропоезд при подходе к станции. Он останавливается и за счет трения, и за счет торможения двигателем.
. Уравнение соответствует замедлению (-Мдин) при тормозном режиме двигателя (-М) и статическом моменте, препятствующем движению (-Мс). Так движется по инерции электропоезд при подходе к станции. Он останавливается и за счет трения, и за счет торможения двигателем.
Билет №6
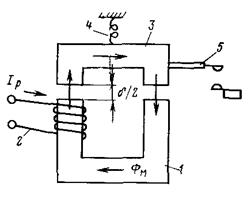
1. Защита АД с помощью реле тока. Электрическая схема
Чтобы избежать нежелательной перегрузки в электрической цепи используют реле тока. Кроме того, его применяют при ограничении лимита подачи электроэнергии.
Существуют два вида реле:
1. Основной – отключать который от сети электоэнергии нельзя (например, компьютерная техника, телевизионная и т.п.).
2. Неосновной – «безболезненное» отключение от сети (нагревательные приборы, освещение и т.п.).
При использовании реле следят, чтобы оно сработало при возникшей перегрузке в сети и не допустило выключение вводного автомата.
Обычно вместе с этим подключают и реле напряжения для отслеживания колебаний напряжения в сети или его отсутствия.
В электрической схеме последовательно подключают реле тока и параллельно реле напряжения.
Для каждого реле существует свой порог срабатывания, т.е. положение при котором оно отключает электрическую сеть, это связано с перегрузкой тока.

Билет №7
1. Схема последовательного (поочередного) включения нескольких (двух, трех) АД
Билет №8
1. Схема управления работой двух АД, исключающая их одновременную работу
Билет №9
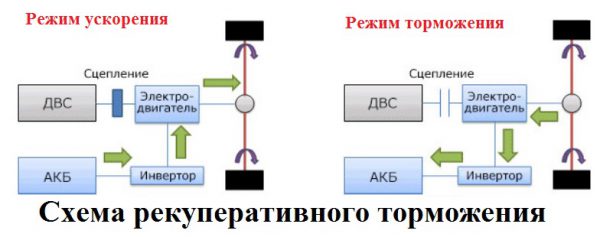
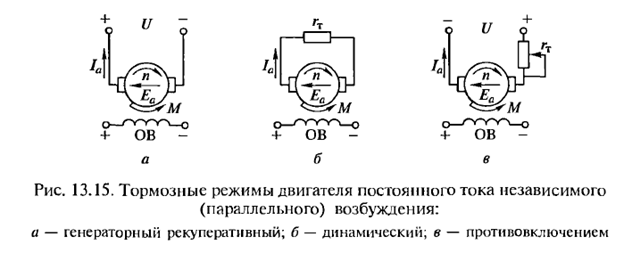
1. Рекуперативное торможение ДПТ. Схема и характеристика
При рекуперативном торможении электродвигатель переходит в генераторный режим. При этом двигатель преобразует механическую энергии, полученную от движущихся частей привода, в электрическую, которую двигатель возвращает в судовую электрическую сеть.
Рекуперативное торможение наступает в следующих случаях:
1. при движении электровоза под уклон (что невозможно в судовых условиях);
2. при переходе двигателя с большей скорости на меньшую (происходит каждый раз автоматически);
3. при опускании тяжелых грузов.
В любом из этих случаев выполняется одно и то же условие рекуперативного торможения: противо ЭДС обмотки якоря двигателя Е = сωФ должна cтать больше напряжения питающей сети U.
В этом случае ток якоря двигателя изменяет знак на обратный
I = (U – E) / r < 0.
Соответственно изменяет свой знак и электромагнитный момент двигателя
М = с (– I )Ф
и момент двигателя становится тормозным.
В судовых условиях рекуперативное торможение может наступить при спуске тяжелого груза, когда двигатель переходит в режим генератора, преобразуя механическую энергию опускающегося груза в электрическую энергию, возвращаемую в сеть;
Однако использование энергии, возвращаемой в судовую сеть практически невозможно вследствие кратковременности работы двигателя в генераторном режиме (с учетом ограниченной высоты трюма).
Более того, это торможение опасно тем, что при одновременном переходе большого числа грузовых лебедок в режим рекуперативного торможения возможен переход генераторов судовой электростанции в двигательный режим с последующим их отключением по обратному току (при помощи реле обратного тока). При этом судно обесточивается. Такие случаи имели место на судах типа «Ленинский комсомол».
Поэтому на судах этой серии параллельно обмоткам якорей двигателей лебедок стали включать реле максимального напряжения, которые при напряжении на якоре U = 225…235 В, т.е. при переходе лебедок в режим рекуперативного торможения, отключали питание судовой сети от данной лебедки.
Билет №10
1. Реверсивная схема включения АД для работы в продолжительном режиме
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и два тепловых реле защиты КК. (рис. 8.3). Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключени-ем при ручном (неавтоматическом) управлении.
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FA). Кроме того, схема управления обес-печивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1 и КМ2). Пуск двигателя при включенном автома-тическом выключателе QF в условных направлениях «Вперед» или «На-зад» осуществляется нажатием соответственно кнопок SB1 или SB2. Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Для реверса или торможения двигателя вначале нажимается кнопка SB3, что приводит к отключению включенного до сих пор контактора (например, КМТ), после чего нажимается кнопка SB2.
Это приводит к включению контактора КМ2 и подаче на АД напря-жения источника питания с другим порядком чередования фаз. Маг-нитное поле двигателя изменяет свое направление вращения на проти-воположное, и начинается процесс реверса, состоящий из двух этапов: торможения противовключением и разбега в противоположную сторону. В случае необходимости только торможения двигателя при достижении им нулевой скорости должна быть вновь нажата кнопка SB3, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение.
Если кнопка SB3 нажата не будет, то это приведет к разбегу двига-теля в другую сторону, т.е. к его реверсу. Во избежание короткого замы-кания в цепи статора, которое можетвозникнуть в результате одно-временного ошибочного нажатия кнопок SB1 и SB2, в реверсивных маг-нитных пускателях иногда предусматривается специальная механичес-кая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управ-ления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата KM2 и, наоборот.
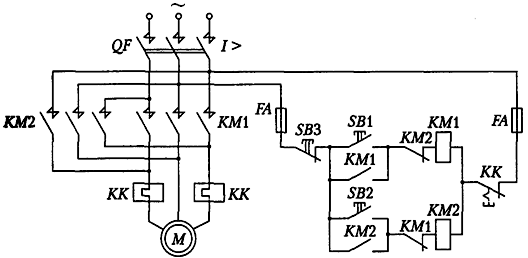
Рис. 8.3. Схема управления асинхронным двигателем с использованием реверсивного магнитного пускателя
Отметим, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании, как это может иметь место при установке предохранителей, а также он не требует замены элементов (как в предохранителях при сгорании их плавкой вставки).
Билет №11топ
1. Время ускорения и замедления электропривода
Билет №12
1. Регулирование угловой скорости ДПТ. Способы. Краткая характеристика
Из уравнений механической характеристики (3.3) следует, что принципиально  может регулироваться изменением
может регулироваться изменением  и
и  .
.
Следует отметить, что естественное снижение скорости с увеличением нагрузки не входит в понятие регулирования .
Одним из показателей характеризующего регулирования скорости является диапазон регулирования  , которое определяется выражением
, которое определяется выражением
 (3.8)
(3.8)
Как правило диапазон регулирования представляют в числах в виде соотношения например 100:1 и т.д. Естественно указывают с требуемой точностью стабилизируют скорости изменением отклонения момента нагрузки.
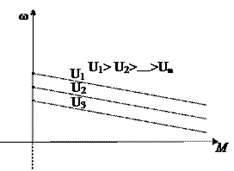
3.3.1 Регулирование скорости вращения двигателя изменением питающего напряжения.
Как следует из уравнения (3.3) при изменении питающего напряжения изменяется величина скорости холостого хода. В результате можно получить семейство механических характеристик (рис. 3.3).
Практически имеется возможность только уменьшать напряжение питания якоря относительно его номинального значения  , т.е. при регулировании скорости изменением
, т.е. при регулировании скорости изменением  должно соблюдаться неравенство
должно соблюдаться неравенство  .
.
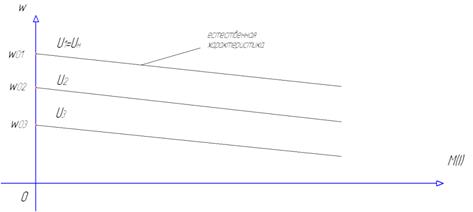
Рис.3.3 Механические характеристики ДПТ с НВ при различных напряжениях 
Таким образом, скорость вращения при изменении напряжения на якоре ДПТ регулируется только вниз от основной, соответствующей естественной характеристике. Это обусловлено тем, что уже на стадии своего проектирования ДПТ рассчитывается на конкретное номинальное напряжение и превышение которого может привести к пробою изоляции. Напряжение на якоре может регулировать с помощью различных статических устройств (управляемые выпрямители, импульсные преобразователи и т.п.)
3.3.2 Регулирование угловой скорости вращения изменением потока возбуждения
При введении добавочного сопротивления  в цепь обмотки возбуждения можно изменить величину магнитного потока двигателя
в цепь обмотки возбуждения можно изменить величину магнитного потока двигателя  в сторону уменьшения от его номинально значения
в сторону уменьшения от его номинально значения  , которое имеет место при
, которое имеет место при  . Как не трудно видеть из уравнения электромеханической характеристики (3.2) для различных значений потока можно получить семейство электромеханических характеристик, представленное на рис 3.4.
. Как не трудно видеть из уравнения электромеханической характеристики (3.2) для различных значений потока можно получить семейство электромеханических характеристик, представленное на рис 3.4.
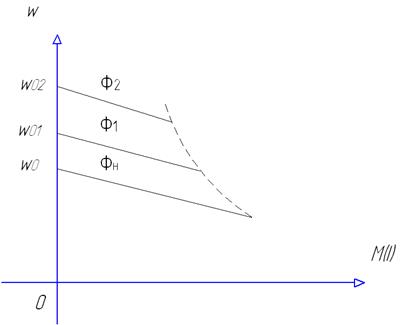
Рис 3.4 Механические (электромеханические ) характеристики при различных потоках возбуждения 
На рис 3.4 нижняя характеристика соответствует номинальному потоку возбуждения . Если при этом добавочное сопротивление в якорной цепи  равно 0 и на якорь подается номинальное напряжение , то эта характеристики будет естественной. При уменьшении величины потока возбуждения угловые скорости вращения холостого хода возрастают в соответствии с выражением (3.4).Ток короткого замыкания при этом остается неизменным.
равно 0 и на якорь подается номинальное напряжение , то эта характеристики будет естественной. При уменьшении величины потока возбуждения угловые скорости вращения холостого хода возрастают в соответствии с выражением (3.4).Ток короткого замыкания при этом остается неизменным.
Пусковой момент определяется выражением  , поэтому с уменьшением величины потока возбуждения Ф уменьшается. Практически этот способ используется только для регулирования угловой скорости вращения вверх от основной.
, поэтому с уменьшением величины потока возбуждения Ф уменьшается. Практически этот способ используется только для регулирования угловой скорости вращения вверх от основной.
3.3.3 Реостатное регулирование угловой скорости вращения
Это один из простейших способов регулирования угловой скорости вращения. Для его осуществления необходимо в цепи якоря регулировать величину добавочного сопротивления. Из уравнения механической характеристики (9) следует, что при постоянном моменте сопротивления  на валу можно получить различные установившиеся угловые скорости ниже основной. Жесткость механических характеристик уменьшается с увеличением величины добавочного сопротивления . Диапазон регулирования скорости не превышает 2:1. Способ характеризуется большими потерями электроэнергии на добавочном сопротивлении .
на валу можно получить различные установившиеся угловые скорости ниже основной. Жесткость механических характеристик уменьшается с увеличением величины добавочного сопротивления . Диапазон регулирования скорости не превышает 2:1. Способ характеризуется большими потерями электроэнергии на добавочном сопротивлении .
Билет №13
1. Способы реверсирования ДПТ с независимым возбуждением. Схемы
При реверсировании двигателя с параллельным возбуждением якорь сперва отключается от источника питания и двигатель механически тормозится или переключается для торможения. После окончания торможения якорь переключается, если он не был переключен в процессе торможения, и выполняется пуск при другом направлении вращения.
В такой же последовательности производится и реверсирование двигателя последовательного возбуждения: отключение — торможение — переключение — пуск в другом направлении. У двигателей со смешанным возбуждением при реверсировании следует переключить якорь либо последовательную обмотку вместе с параллельной.
Для изменения направления вращения ДНВ нужно изменить направление действия момента, чего можно достичь изменением направления IЯили Ф, как следует из выражения:
 .
.
О 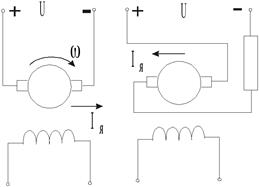 бычно это осуществляется изменением направления IЯ, т.к. изменение направления Ф сильно затянуло бы процесс реверса из-за большой индуктивности обмотки возбуждения. Кроме того, в ней при ее отключении и быстром исчезновении Ф может навестись большая ЭДС самоиндукции, которая может вызвать пробой изоляции.
бычно это осуществляется изменением направления IЯ, т.к. изменение направления Ф сильно затянуло бы процесс реверса из-за большой индуктивности обмотки возбуждения. Кроме того, в ней при ее отключении и быстром исчезновении Ф может навестись большая ЭДС самоиндукции, которая может вызвать пробой изоляции.
Билет №14
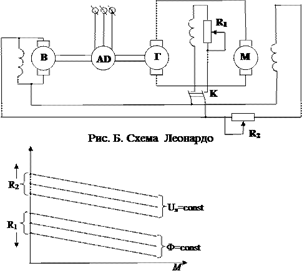
1. Краткий исторический обзор развития электропривода
Электропривод – наука, изучающая теорию и практику электромеханических систем.
Переход к более совершенным типам привода — индивидуальному и взаимосвязанному, которые полнее учитывают основные условия работы различных производственных механизмов, стал возможен лишь на базе широкой электрификации. Применение электропривода создали новую эпоху в развитии промышленности.
Первый электродвигатель, с помощью которого осуществлен электропривод, был построен в 1834—1838 гг. петербургским академиком Б. С. Якоби, в 1838 г. на Неве были проведены испытания этого двигателя, установленного на небольшом катере.
Открытие явления вращающегося магнитного поля в 80-х годах XIX века (Г. Феррарис и Н. Тесла) положило начало конструированию многофазных электродвигателей. Наиболее экономичной среди многофазных систем оказалась система трехфазного тока, основы которой были разработаны в 1889—1891 г.г. русским инженером М. О. Доливо-Добровольским. Система трехфазного тока явилась тем новым техническим средством, с помощью которого разрешался весь комплекс проблемы производства, передачи, распределения и потребления электроэнергии. Разработкой трехфазной системы были созданы предпосылки для развития электрификации.
Создание М. О. Доливо-Добровольским в 1889 г. трехфазного асинхронного двигателя ознаменовало новый этап в развитии электропривода и открыло широкую дорогу промышленному применению электричества.
Несомненные экономические преимущества централизованного производства электроэнергии и простота ее распределения привели к тому, что электродвигатель, постепенно вытесняя другие виды двигателей, занял первое место во всех отраслях промышленности.
Так, в черной металлургии уже в первой пятилетке было введено в строй 19 мощных прокатных станов, а во второй 60. В 1931—1932 гг. разрабатывается отечественная система комплексной автоматизации электроприводов загрузки доменных печей, создается электрооборудование для врубовых машин угольной промышленности, взаимосвязанный электропривод бумагоделательных машин и т. п.
В 1936—1937 гг. были разработаны на принципе следящего привода схемы автоматического управления нажимными винтами прокатных станов.
Последующие годы (1940—1945 гг.) ознаменованы разработкой новых принципов построения систем автоматического управления электроприводами, основанных на применении замкнутых систем с обратными связями и использовании электромашинных, электронных и в дальнейшем магнитных усилителей.
Первая установка такого рода, в которой двигатель постоянного тока для привода шахтного подъемника питался от управляемого ртутного выпрямителя, была пущена в эксплуатацию в 1940 г. Замена электромашинного агрегата ртутным выпрямителем заметно удешевила установку и привела к повышению КПД электропривода.
Революционизирующее влияние на развитие автоматизированного электропривода оказали разработка и производство полупроводниковых приборов - транзисторов, тиристоров, которые благодаря своим преимуществам стали вытеснять ранее применявшиеся в электроприводе устройства с электронными лампами и ионными приборами. Наряду с системой генератор—двигатель (Г - Д), все шире используется более быстродействующая система тиристорный преобразователь - двигатель (ТП - Д).
Быстрое развитие полупроводниковой техники, существенное увеличение выпускаемых тиристоров обусловливают резкое уменьшение их стоимости, поэтому наряду с широким использованием тиристорных преобразователей для приводов постоянного тока осваиваются автоматизированные электроприводы переменного тока, управляемые различного рода тиристорными преобразователями.
Привод переменного тока, в котором используется асинхронный двигатель с короткозамкнутым ротором с частотным управлением, является весьма перспективным и во многих случаях полностью заменяет систему ТП—Д постоянного тока.
Современный автоматизированный электропривод представляет собой сложную электромеханическую систему. Основные блоки системы управления реализуют: ввод данных, слежение за материалом, регистрацию измеряемых данных технологического процесса, автоматическую адаптацию и оптимальное по времени регулирование процесса и другие функции.
Системы автоматического управления электроприводам постоянного и переменного тока, в которых используются все достижения полупроводниковой техники, а также возможности электронной вычислительной техники, позволяют существенно упростить конструкции производственных механизмов, повысить их точность и поднять производительность, т. е. способствовать техническому прогрессу.
Билет №15
1. Регулирование угловой скорости ДПТ независимого возбуждения изменением питающего напряжения
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки.
Диапазон регулирования равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя.
Преимущества данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя осуществляется без дополнительных потерь мощности в силовой цепи якоря.
Особенности данного режима:
1) Регулирование вниз от ωном
2) Характеристики параллельны
Билет №16
1. Реверсивная схема включения АД с тепловой защитой
Билет №17
1. Механические характеристики производственных механизмов
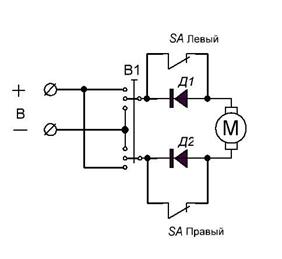
Реверсирование ДПТ. Схемы
Электромагнитный момент 
Е 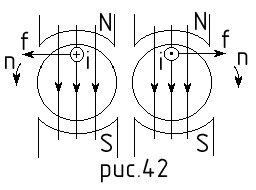 сли изменить направление тока в якоре, то сила действующая на проводник с током изменит направление, а, следовательно, изменится и направление вращения рис. 42. К такому же результату приведет изменение полюсов (изменение направления тока обмотки возбуждения). Таким образом, для реверсирования необходимо либо изменить направление тока в якоре, либо изменить направление тока в обмотке возбуждения (изменить полюса). Если на входе двигателя изменить + на - , то поток
сли изменить направление тока в якоре, то сила действующая на проводник с током изменит направление, а, следовательно, изменится и направление вращения рис. 42. К такому же результату приведет изменение полюсов (изменение направления тока обмотки возбуждения). Таким образом, для реверсирования необходимо либо изменить направление тока в якоре, либо изменить направление тока в обмотке возбуждения (изменить полюса). Если на входе двигателя изменить + на - , то поток  и ток якоря
и ток якоря  изменят направление, а момент останется тем же как и направление вращения.
изменят направление, а момент останется тем же как и направление вращения.
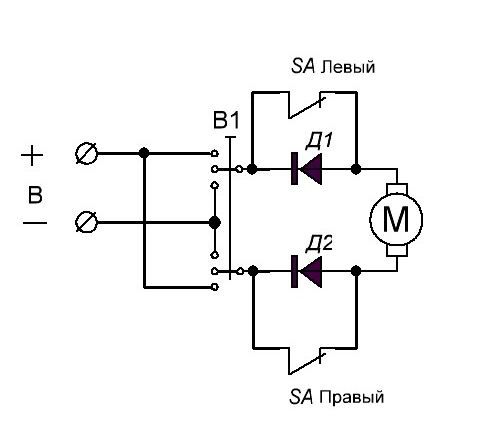
При использовании двигателя постоянного тока в различных устройствах иногда возникает необходимость остановки двигателя в любом положении, а также в крайних положениях позиционирования с последующим реверсом.
Эту задачу решает предлагаемая схема.
В1 - тумблер со средним положением для реверса двигателя. В зависимости от задачи он может иметь фиксацию в крайних положениях или без неё.
Диоды Д1 и Д2 подбираются по максимальному току двигателя при его нагрузке.
SA– концевики, установленные в устройстве.
Работа схемы.
В исходном состоянии питание на двигатель не поступает и он не вращается.
Если тумблер перевести в верхнее по схеме положение двигатель вращается (допустим) влево. В крайнем левом положении SAлевыйразмыкается и диод Д1 не пропускает напряжение питания. Двигатель останавливается.
Если тумблер перевести в нижнее положение - то происходит переполюсовка напряжения питания. Двигатель тогда вращается в правую сторону. Д1 этому уже не препятствует.
Далее концевик SAлевый замыкается. При достижении крайнего правого положения SAправыйразмыкается и диод Д2не пропускает напряжение питания. Двигатель останавливается.
Переключением положения тумблера меняется направление вращения двигателя.
Схему можно применить для вращения антенн, КПЕ, вариометров и т.п.
1. Реверсивная схема включения АД для работы в продолжительном режиме
СХЕМЫ ТОРМОЗНЫХ РЕЖИМОВ
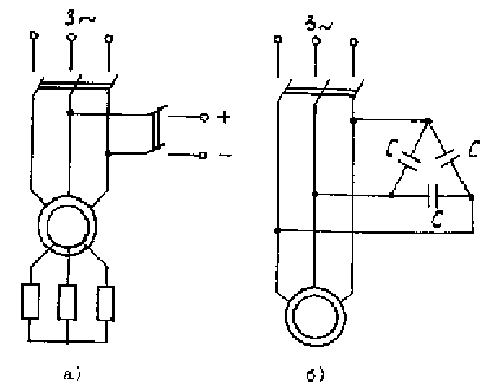 |
а) динамическое; б) конденсаторное; в) противовключением;
 |
г) индуктивно-динамическое.
 |
Билет №1
1. Время ускорения и замедления электропривода
Время переходных режимов привода: пуска, торможения, перехода от одной скорости к другой влияет на производительность механизма. Определение времени переходных процессов основано на интегрировании уравнения движения привода (4.3). Разделяя переменные, получаем:
.
Время, необходимое для изменения скорости привода от до :
(4.4)
Для решения этого интеграла необходимо знать зависимости моментов двигателя и механизма от скорости. В простейшем случае, приняв М=const, Мс=const и I=const, получим:
.
Этим уравнением можно воспользоваться, например, для расчета времени пуска привода. Если значение момента двигателя во время пуска обозначить через М , как это показано на рис.4.1, то получим следующее выражение для времени пуска из состояния покоя до конечной скорости , соответствующей заданному моменту сопротивления:
.
| | | ||
.
В тех случаях, когда динамический момент имеет отрицательное значение, привод замедляется. Как указывалось выше, для такого случая уравнение моментов будет иметь вид:
.
Очевидно, привод замедляется и в том случае, когда двигатель развивает положительный момент, по абсолютному значению меньше момента сопротивления.
Из последнего уравнения следует, что время торможения:
.
Полагая в частном случае М=const, Мс=const и I=const, получим:
.
Пользуясь этим уравнением, можно рассчитать время торможения
Торможение противовключением ДПТ независимого возбуждения
ТОРМОЖЕНИЕ ПРОТИВОВКЛЮЧЕНИЕМ. Его можно получить двумя способами: изменением направления тока в обмотке якоря или в обмотке возбуждения. Чаще применяют первый способ, так как он вызывает меньшую дугу на контактах переключающих аппаратов, что способствует их меньшему износу и обеспечивает меньшее время торможения (вследствие меньшей индуктивности).
При изменении направления тока в якоре (рис. 8.1 г) момент изменяет свой знак:
 .
.
Теперь ток в якоре протекает не под действием разности сетевого направления и ЭДС, а под действием их суммы:
 .
.
Поэтому ток противовключения значительно больше тока короткого замыкания и в десятки раз больше номинального. Соответственно таким же большим получается и тормозной момент.
Противовключение применяют для быстрой остановки станков с небольшим моментом инерции. Достоинство этого вида торможения - его очень высокая эффективность. Но слишком интенсивное торможение равносильно удару в электроприводе, что опасно для механической прочности всего устройства: двигателя, редуктора, механизма. Другой недостаток - необходимость отключения двигателя от сети в момент, когда  , иначе произойдет реверсирование. Вручную сделать это невозможно, а автоматическое отключение требует определенной аппаратуры и точности её настройки.
, иначе произойдет реверсирование. Вручную сделать это невозможно, а автоматическое отключение требует определенной аппаратуры и точности её настройки.
Билет №2
1. Типы электроприводов и движения осуществляемые ими. Структурная схема автоматизированного электропривода
Приводом называется совокупность механизмов, передающих движение от источника энергии (двигателя) до элемента выполняющего заданное движение станка, т.е. к рабочим или, иначе говоря, исполнительным органам станка.
Электропривод различается:
1) по видам движения:
- вращательный-; электродвигательным устройством является вращающийся двигатель
- поступательный;
- ударный;
- вибрационный;
- дискретный ( вращательный и поступательный );
2) по видам передаточных устройств:
- без редукторный;
- редукторный, с электромагнитной дисковой муфтой, электромагнитной муфтой скольжения, гидромуфтой;
3) по роду тока двигателя:
- постоянного тока;
- переменного тока;
4) по видам преобразовательных устройств:
- с машинным преобразователем;
- со статическим преобразователем;
5) по режиму работы:
- длительный;
- кратковременный;
- повторно-кратковременный;
6) по степени управляемости:
- нерегулируемый – параметры привода не регулируются и могут изменяться только в результате возмущающих воздействий;
- регулируемый – параметры привода могут изменяться под воздействием управляющего устройства;
- программно-управляемый – управляемый в соответствии с заданной программой;
- следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определённой точностью в соответствии с произвольно меняющимся задающим сигналом;
- адаптивный – автоматически избирающий структуру и параметры системы управления при изменении условий работы машины с целью выработки оптимального режима;
7) по уровню автоматизации:
- неавтоматизированный – в котором управление ручное;
- автоматизированный – управляемый автоматическим регулированием параметров;
- автоматический – в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
ЗА – ЗАЩИТНАЯ АППАРАТУРА (АВТОМАТИЧЕСКИЕ ВЫКЛЮЧАТЕЛИ, ПРЕДОХРАНИТЕЛИ И ПР.)
ПЭЭ – ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ (ЧАСТОТНИК, ТИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ)
ДТ – ТОКОВЫЙ ДАТЧИК
ДН – ДАТЧИК НАПРЯЖЕНИЯ
СУ ПЭЭ – СИСТЕМА УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ
ПУ – ПУЛЬТ УПРАВЛЕНИЯ
ПМ – ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ (МУФТА, РЕДУКТОР И ПР.)
РО – РАБОЧИЙ ОРГАН
ЭД — ЭЛЕКТРОДВИГАТЕЛЬ
При такой структуре управления СУ ПЭЭ управляет не только преобразователем, но и всей системой сразу. При таком управлении датчики обратной связи обеспечивают контроль за параметрами и сигнализируют об этом оператору. Данная система в автоматическом режиме может проводить некоторые операции (пуск, останов и пр.), но все равно требуется присутствие человека, для контроля, за работой данного устройства.
Дата: 2019-02-02, просмотров: 543.