Влияние регуляторов на динамические показатели качества и на устойчивость могут быть выявлены только из результатов математического моделирования. Здесь можно дать лишь качественную оценку такого влияния:
1). При применении П-регулятора и увеличении коэффициента передачи kП его возрастает время переходного процесса tПП, может появиться перерегулирование σ, а время первой установки t1 уменьшается (рис.2.19). В целом система становится быстродействующей, но с возросшим перегулированием. При
очень большом kП существует небольшая вероятность потери устойчивости. Напряжение возбуждения uf в процессе регулирования изменялась от нулевого уровня до предельного уровня форсировки - потолочного возбуждения.
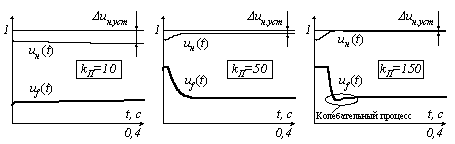
Рисунок 2.19 - Переходные процессы для напряжений статора uн(t) и возбуждения uf(t) при различных коэффициентах передачи kпП-регулятора
2). При применении И-регулятора с малой постоянной времени ТИ перерегулирование σ становится большим, велика вероятность потери устойчивости. Переходный процесс колебательный со слабым затуханием и, поэтому, с очень большим временем переходного процесса tПП, достигающем нескольких единиц-десятков секунд (рис.2.20). Поэтому, достижение абсолютной точности
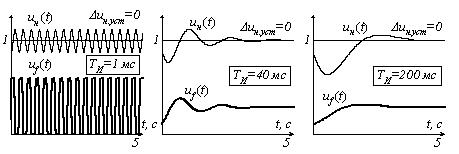
Рисунок 2.20 Переходные процессы для напряжений статора uн(f) и возбуждения uf(f) при различных постоянных времени ТиИ-регулятора
регулирования является чисто теоретическим эффектом, который не имеет практической значимости. При применении И-регулятора с большой постоянной времени ТИ перерегулирование σ мало, его может вообще не быть. Однако время переходного процесса tППбольшое, еще больше время первой установки t1. Поэтому, и в этом случае достижение абсолютной точности регулирования является чисто теоретическим эффектом, который не имеет практической значимости.
3). При применении ПИ-регулятора можно использовать И-часть с малой постоянной времени ТИ. Благодаря присутствию П-части в таком регуляторе перерегулирование σ становится умеренным или малым (рис.2.21). Поэтому
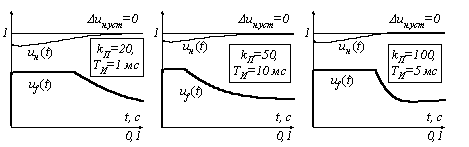
Рисунок 2.21. Переходные процессы для напряжений статора uн(t) и возбуждения uf(t) при различных сочетаниях значений коэффициента передачи kП и постоянной времени ТИПИ-регулятора
вероятность потери устойчивости очень мала. Время переходного процесса tПП и время первой установки t1 являются малыми, вполне удовлетворяющими требованиям к САР напряжения СГ. Нулевая ошибка регулирования напряжения достигается за доли секунды. Этими положительными качествами ПИ-регулятора обосновывается его преимущественное применение на практике. Остается лишь решить вопрос о выборе значений параметров настройки ПИ-регулятора – коэффициента передачи kП и постоянной времени ТИ. Существует множество методик решения указанного вопроса.
Дата: 2019-02-02, просмотров: 474.