Наиболее распространенным типом магнитоэлектрического датчика является генераторный датчик коммутаторного типа с пульсирующим магнитным потоком. Принцип действия такого датчика заключается в изменении магнитного сопротивления магнитной цепи, а следовательно, и магнитного потока в ней, при изменении зазора с помощью ферромагнитного зубчатого ротора (коммутатора).
На рис. А.27 показана принципиальная схема магнитоэлектрического датчика коммутаторного типа. При вращении зубчатого ротора в обмотке статора в соответствии с законом электромагнитной индукции возникает переменное напряжение с частотой, соответствующей частоте вращения зубчатого ротора.


Рисунок А.27 – Принципиальная схема коммутаторного датчика и осциллограмма выходного сигнала
Напряжение определяется по формуле:
 ,
,
где k — коэффициент, зависящий от характеристик магнитной цепи; w — количество витков обмотки; n — частота вращения зубчатого ротора;  — изменение потока Ф в зависимости от угла поворота ά.
— изменение потока Ф в зависимости от угла поворота ά.
Когда зубцы ротора 4 приближаются к полюсам 5 статора, в обмотках 2, включенных последовательно и согласованно, нарастает напряжение £/„„,. При совпадении фронтов зубцов ротора с полюсами статора (со средней их линией) напряжение  достигает максимума, затем быстро меняет знак и при удалении зубцов увеличивается в противоположном направлении снова до максимума. Такие датчики еще и по настоящее время применяются в распределителях зажигания, в которых зубчатый ротор устанавливается на распределительный валик и изготавливается из мягкой стали. Число зубцов зависит от числа цилиндров двигателя. Необходимое магнитное поле создают постоянные магниты 1.
достигает максимума, затем быстро меняет знак и при удалении зубцов увеличивается в противоположном направлении снова до максимума. Такие датчики еще и по настоящее время применяются в распределителях зажигания, в которых зубчатый ротор устанавливается на распределительный валик и изготавливается из мягкой стали. Число зубцов зависит от числа цилиндров двигателя. Необходимое магнитное поле создают постоянные магниты 1.
Интересно отметить, что в данной симметричной магнитной системе для каждого положения ротора обеспечивается усредненное значение зазора 3, за счет чего компенсируются погрешности изготовления отдельных деталей и биение ротора.
Датчики на эффекте Холла
Благодаря развитию микроэлектроники широкое распространение получили датчики углового положения на эффекте Холла. Эффект Холла возникает в плоской полупроводниковой пластине, внесенной в магнитное поле, при пропускании через нее электрического тока. Если поместить пластинчатый элемент толщиной h в магнитном поле таким образом, чтобы направление индукции В магнитного поля было перпендикулярно плоскости пластины, и пропустить ток / через пластину в продольном направлении, то в поперечном направлении между противоположными гранями пластины возникнет ЭДС Холла:
Ех = kIB/h,
где k— постоянная Холла, м2/А.
Чувствительность элемента Холла зависит от соотношения между длиной и шириной пластины и повышается при уменьшении ее толщины. Для пленки толщина h достигает 10-6 м, для пластины из полупроводникового кристалла — 10-4 м. Для изготовления элементов Холла используются германий, кремний, арсенид галлия (GaAs), арсенид индия (InAs), антимонид индия (InSb).
Электродвижущая сила самоиндукции Холла очень мала и поэтому должна быть усилена вблизи кристалла для того, чтобы устранить влияние электромагнитных помех. Конструктивно элемент Холла и преобразовательная схема, содержащая усилитель, пороговый элемент, выходной каскад и стабилизатор напряжения, выполняются в виде интегральной микросхемы, которая называется магнитоуправляемой интегральной схемой.
Такие интегральные схемы (ИС) с датчиками Холла выпускаются дискретными и аналоговыми. Дискретные ИС применяются в датчиках относительного положения и скорости. Аналоговые — в датчиках абсолютного положения вместо контактных потенциометрических. Дискретные датчики Холла, работающие в условиях подкапотного пространства, имеют погрешность менее 0,5% и используются, как правило, в качестве датчиков положения коленчатого или распределительного валов, в системах зажигания. Описание конструкции и принципа действия датчика-распределителя зажигания на эффекте Холла см. в [3].
Выходное напряжение аналоговых датчиков Холла пропорционально магнитной индукции поля и напряжению питания, что упрощает их сопряжение с АЦП. На практике для определения углового положения может применяться аналоговый датчик Холла, конструкция которого показана на рис. А.28. При повороте кольцевого магнита относительно статоров, между которыми размещен датчик Холла, выходное напряжение датчика меняется. В диапазоне 150° характеристика линейна, погрешность преобразования менее 1%. В подобных датчиках нет трущихся частей, кроме подшипников, они безинерционны и имеют высокую надежность.
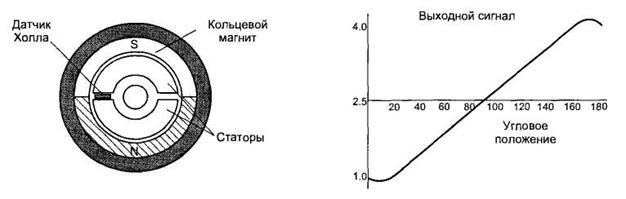
Рисунок А.28 – Датчик абсолютного углового положения с чувствительным элементом Холла
Однако стоимость аналоговых датчиков Холла высокая, кроме того, на их чувствительность влияет температура (порядок 0,001/°С). Стоимость — очень существенный фактор для автомобильных датчиков, поэтому в датчиках Холла применяются более дешевые магнитные материалы с низкой температурной стабильностью: ферриты и сплавы AlNiCo (0,002...0,02/°С). Приходится вводить внешние компенсирующие элементы, программировать характеристики датчика через интерфейс.
Дата: 2018-11-18, просмотров: 1014.