Пусть корабль движется по поверхности Земли, имеющей форму шара с величиной среднего радиуса R = 6366,707 м, из точки В1 в точку В2 (рис. 3.24). Тогда, в соответствии с формулами (3.38) и (3.39), координаты точки В2 (текущие координаты местоположения корабля) можно выразить как:
 (3.40)
(3.40)
Учитывая, что координаты точки начала движения корабля должны быть известны, то задача выработки автопрокладчиком текущих координат места корабля может быть представлена как совокупность следующих задач:
1) вычисление значений РШ и РД, определяемых как результат углового перемещения корабля по поверхности Земли из начального его местоположения за конечный промежуток времени;
2) непрерывное формирование координат текущего местоположения корабля в соответствии с (3.40);
3) непрерывная выдача текущих координат следующим группам потребителей:
- операторам (на индикаторы, шкалы (в градусной мере);
- в системы корабельной автоматики (в виде напряжения или угла поворота вала);
- на планшет штурмана (в виде напряжений, подаваемых на каретки планшета для непрерывного отображение на карте (плане) вычисленных текущих координат местоположения корабля).
Очевидно, что причиной изменения значений РШ и РД является перемещение корабля по поверхности Земли в пространстве и времени, определяемое как его угловое перемещение в двух взаимно перпендикулярных плоскостях: плоскости меридиана (приращение широты) и плоскости параллели (приращение долготы).
Используя известную из теоретической механики формулу (ω = V/R) соответствия между линейной и угловой скоростями движения объекта по окружности с радиусом R и зная значения составляющих скорости корабля VN и VЕ можно рассчитать угловые скорости движения корабля по земной поверхности как в плоскости меридиана, так и в плоскости параллели. При этом необходимо учитывать, что радиус параллели Rпар зависит от широты плавания корабля и, для принятой модели Земли в виде шара, определяется по формуле (Rпар = Rcosφ), где широта φ в начальный момент (точка В1) равна величине φн, а в любой последующий момент времени t соответствует счислимой широте φс местоположения корабля. Тогда угловые скорости перемещения корабля в направлении меридиана ωφ и параллели ωλ рассчитываются по формулам:
Именно эти формулы и являются исходными выражениями для вычисления приращений сферических координат корабля при его движении из начальной точки в заданном направлении.
Эти приращения могут быть определены с применением известных из физики формул, используемых для вычисления пройденного за некоторый интервал времени расстояния, а именно:
 ;
;
 .
.
Но корабельные измерители скорости движения – лаги измеряют не угловую, а линейную скорость движения корабля. Следовательно, соответствующие перемещения корабля по меридиану и параллели определяются как:
а) при 
б) при 
 (*)
(*)
где V - путевая скорость перемещения корабля, а VN и VE - ее проекции на меридиан и параллель.
В навигации понятие «Отшествие» (ОТШ) понимается как разность долгот двух точек, вычисленная при нулевой широте (на экваторе), т. е. при j = 0
 (3.41)
(3.41)
И так как именно эта формула используется для определения отстояния корабля от исходного местоположения по экватору, то при определении значения РД на любой другой (не нулевой) широте необходимо учитывать, что
 (**)
(**)
где  - средняя широта между точками В1 и В2 (рис. 3.25).
- средняя широта между точками В1 и В2 (рис. 3.25).
Величины VN и VE в автопрокладчике вычисляются по данным корабельных измерителей курса, скорости и дрейфа, вводимых в автопрокладчик непрерывно и автоматически, а также с учетом параметров течения, вводимых эпизодически вручную. Диаграмма формирования величин VN и VE приведена на рис. 3.26.
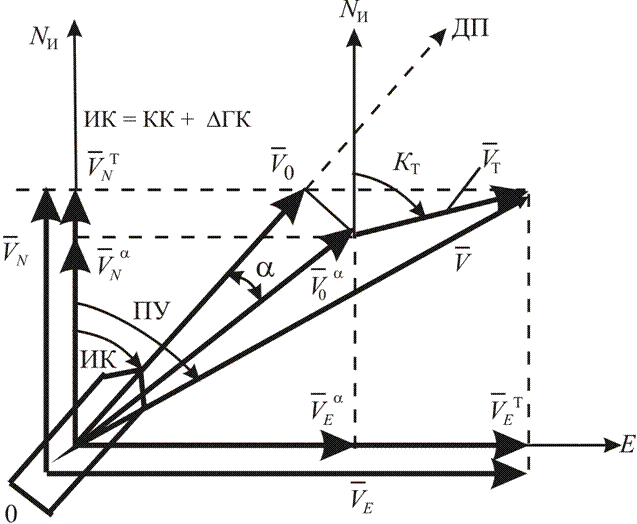
Рис. 3.26. Диаграмма формирования параметров VN и VE
Таким образом, для определения угловых перемещений корабля во времени и пространстве нам необходимо учесть приведенные выше соотношения меду линейной и угловой скоростями движения материальной точки на поверхности шара с радиусом R, т. е. учесть формулы (ω = V/R) и (Rпар = Rcosφ). Тогда:
 (3.42)
(3.42)
 (3.43)
(3.43)
где VN, VE - проекции линейной скорости перемещения корабля по поверхности Земли на меридиан и параллель соответственно, R - радиус Земли-шара.
Приведенные выше формулы определения РШ и РД в практике кораблевождения не очень удобны, так как в качестве единицы измерения разности широт и долгот (∆φ и ∆λ) используется безразмерная величина - радиан. Поэтому, для перевода значений угловых величин РШ и РД из значений радиан в соответствующие угловые минуты, необходимо подынтегральные выражения из формул (3.42) и (3.43) умножить на коэффициент, получаемый из соотношения 1 рад = 57,360 угл. мин. Величина коэффициента перевода будет равна k = 3438 угл. мин/рад. Кроме того, в указанные формулы следует подставить средний радиус Земли в морских милях, т. е. величину R = 3438 миль. С учетом отмеченных преобразований выражения (3.42) и (3.43) приобретают следующий вид:
 (3.44)
(3.44)
 (3.45)
(3.45)
где величина m = 1угл. мин/мили представляет собой постоянный коэффициент соответствия между линейными и угловыми величинами, а составляющие путевой скорости корабля V на меридиан (VN) и параллель (VЕ) рассчитываются в автопрокладчике в соответствии с диаграммой, приведенной на рис. 3.26. Таким образом, формулы для выработки счислимых координат, заложенные в алгоритм задачи счисления для автопрокладчиков типа АП-4, АП-5 принимают вид:
 (3.46)
(3.46)
 (3.47)
(3.47)
Так осуществляется аналитическое счисление текущего местоположения корабля при его перемещении в пространстве и времени по поверхности морской поверхности Земли-шара.
Вычисляемые значения текущих координат транслируются всем потребителям (личный состав и техника), а также должны отображаться на планшете (прибор 2) автопрокладчика, на котором осуществляется автоматическая прокладка пути корабля на морской навигационной карте (МНК) в меркаторской проекции. Для решения этой задачи, требующей в любой момент времени указывать место корабля на МНК, используется специальное устройство (каретка), которое движется по планшету АП, повторяя путь корабля в масштабе МНК.
Исходной информацией для непрерывного отображения на планшете текущего местоположения корабля являются значения РШ и ОТШ, вычисляемые по формулам (*), которые определяют фактические отстояния корабля от начала ведения счисления (от начала прокладки) в любой момент времени по меридиану (SN) и экватору (SE) соответственно, т. е.:
 (3.48)
(3.48)
 (3.49)
(3.49)
Полученные составляющие SN и SE фактического перемещения корабля следует преобразовать в соответствующие перемещения каретки планшета АП, учитывая при этом масштаб карты, используемой для ведения графической прокладки.
Морские навигационные карты (МНК) создаются в равноугольной проекции Меркатора, где земная поверхность проектируется на плоскость карты с переменным масштабом по меридиану. Поэтому формулы для расчета составляющих перемещения каретки в масштабе карты этот масштаб должны учитывать, а именно:
где Мт – текущий (переменный) масштаб карты, зависящий от широты плавания корабля.
На практике вместо полного значения масштаба Мт часто используют только его знаменатель Ст, так как, по определению, эти величины жестко связаны соотношением Мт = 1/Ст. В современных автопрокладчиках знаменатель текущего масштаба Ст определяется по формуле
 (3.50)
(3.50)
Знаменатель Со основного масштаба МНК и широта  ее главной параллели, необходимые для вычисления по этой формуле, указываются под названием карты и устанавливаются на планшете (приборе 2) при его подготовке к работе.
ее главной параллели, необходимые для вычисления по этой формуле, указываются под названием карты и устанавливаются на планшете (приборе 2) при его подготовке к работе.
Таким образом, перемещение кареток в АП на МНК в проекции Меркатора осуществляется на расстояния, определяемые по следующим формулам:
 ,
,  .
.
Здесь параметры СО и φгп связаны с величиной знаменателя экваториального масштаба СЭ одной и той же карты довольно простым соотношением
что упрощает подготовку планшета АП к работе.
При ведении боевой прокладки в ходе поиска и уничтожения кораблей противника более удобно использовать постоянный масштаб, который не совпадает ни с одним из масштабов издаваемых карт. В этом случае вместо карты используются различные планшеты и планы.
При выполнении графической прокладки на картах (планах) с постоянным масштабом (Мп = const) работа схемы графической прокладки упрощается, а для вычисления перемещения каретки планшета АП используется формула, имеющая вид:
 ,
,
где величина знаменателя масштаба плана Сп = const.
Переключение планшета АП для работы по данной формуле производится оператором вручную при вводе постоянного масштаба.
Схема алгоритма формирования в аналоговой САС текущих счислимых координат корабля и их отображения на карте (плане) приведена на рис. 3.27.
Структурно-функциональная схема аналоговой системы автоматического счисления и прокладки может быть представлена в виде, показанном на рис. 3.28.
Рис. 3.27. Схема алгоритма формирования в аналоговой САС текущих счислимых координат корабля и их отображения на карте (плане)

Рис. 3.28. Структурно-функциональная схема аналоговой системы автоматического счисления и прокладки
Дата: 2018-12-21, просмотров: 589.