В соответствии с функциональным назначением различают три типа следящих систем (СС), используемых в морских средствах навигации (МСН):
- синхронные следящие системы (ССС);
- решающие следящие системы (РСС);
- интегрирующие следящие системы (ИСС).
ССС предназначены для передачи и воспроизведения навигационной информации в виде угла поворота вала (шкалы репитера). Они используются в различных системах трансляции информации, вырабатываемой морскими средствами навигации.
РСС предназначены для выработки информации на основе данных от нескольких МСН. Они используются в системах курсоуказания, автоматического счисления и др.
ИСС предназначены для выработки навигационной информации путем накопления числа оборотов вала. ИСС используются в автопрокладчиках, гироазимутах, ИНС и в других МСН.
Одноотсчетная самосинхронизирующаяся следящая система (ОССС) состоит (рис. 3.15) из двух вращающихся трансформаторов (ВТ-датчика и ВТ-приемника), усилителя и исполнительного двигателя (АДП). Здесь под самосинхронизацией понимается однозначность согласованных положений роторов ВТ-П и ВТ-Д в рабочем диапазоне углов. ОССС на СКВТ самосинхронизируется при рассогласовании ВТ-П и ВТ-Д в пределах 360о.
В качестве ВТ-датчика (ВТ-Д) используется СКВТ, работающий в режиме координатора, а в качестве ВТ-приемника (ВТ-П) – СКВТ, работающий в режиме построителя (режим ПВТ).
Напомню, что оба режима, по сути, моделируют векторные преобразования. В режиме координатора вектор моделируемого навигационного параметра раскладывается на две составляющие в прямоугольной системе координат, а в режиме построителя – наоборот, по двум составляющим строится вектор моделируемого навигационного параметра. При этом, работа СКВТ в режиме построителя всегда осуществляется совместно с усилителем и исполнительным двигателем.
Усилитель служит для усиления сигнала рассогласования по напряжению и мощности до величины, достаточной для управления исполнительным двигателем и отработкой им угла рассогласования с необходимой чувствительностью.
Двигатель выбирается исходя из предполагаемой нагрузки на его валу.
Под нечувствительностью системы передачи угла понимают минимальный угол поворота входной оси системы, при котором ее выходная ось приходит в движение, т.е. начинается вращение двигателя, отрабатывающего угол рассогласования.
Точность передачи следящей системы характеризуется статической погрешностью передачи угла, где под статической погрешностью понимается разность между положениями роторов ВТ-Д и ВТ-П после отработки двигателем заданного угла.
Принцип работы одноотсчетной ССС основан на использовании ЭДС, индуцируемой в синусной обмотке ВТ-приемника (ПВТ) для управления исполнительным двигателем, который осуществляет синхронизацию ротора ВТ-приемника с ротором ВТ-датчика по углу поворота.
Условием синхронизации по углу поворота ротора ВТ-приемника с ротором ВТ-датчика является равенство нулю напряжения  в синусной обмотке ВТ-приемника.
в синусной обмотке ВТ-приемника.
Чтобы уяснить суть этих условий, необходимо рассмотреть некоторую математическую зависимость, связывающую в схеме, представленной на рис. 3.15, сигнал, подаваемый на вход ОССС, и углы поворота роторов ВТ-Д и ВТ-П. По существу решение задачи кроется в особенностях работы ВТ-П в режиме построителя (ПВТ).
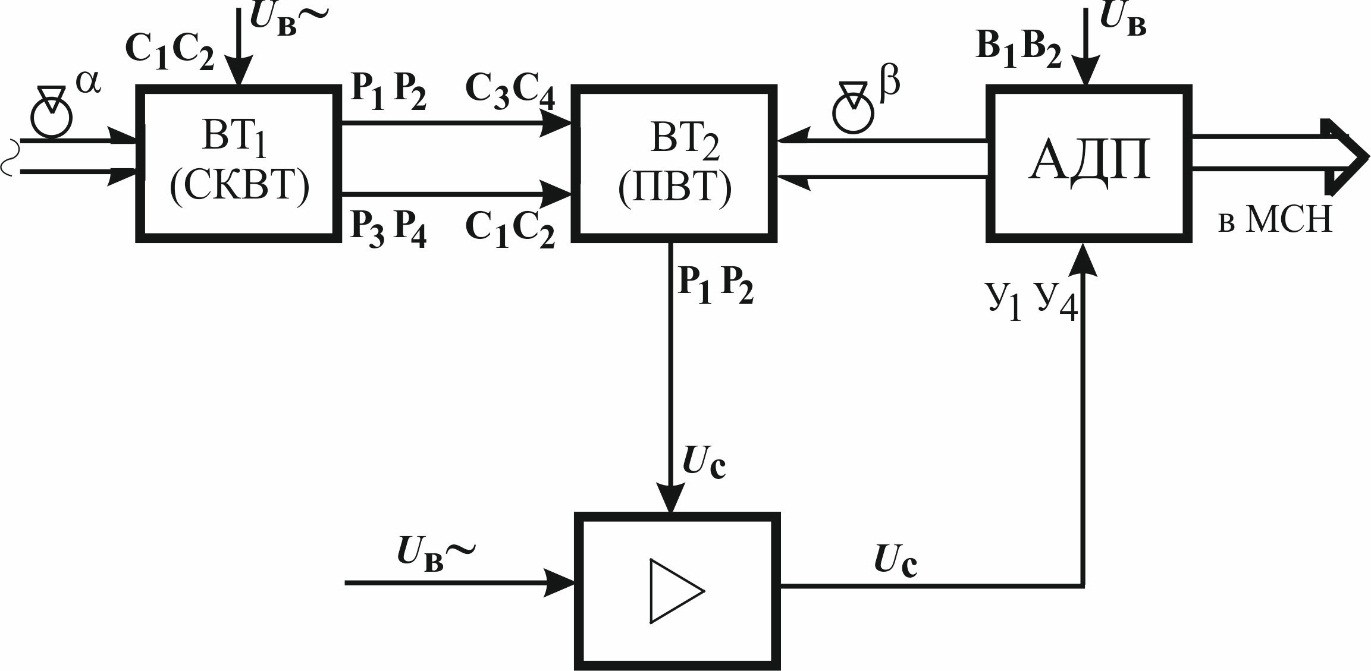
Рис. 3.15. Структурно-функциональная схема ОССС
Рассмотрим эти особенности.
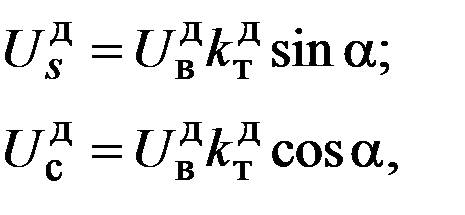
Отличительной особенностью режима ПВТ является использование обеих статорных обмоток ВТ-П (обмотки возбуждения и квадратурной) для воспроизведения (построения) вектора навигационной информации по модулю - напряжению  и аргументу (углу β поворота ротора ВТ-П). Информация на статорные обмотки ВТ-П поступает от ВТ-Д, который в режиме СКВТ-координатора вырабатывает две составляющие вектора информации в виде напряжений в роторных (синусной и косинусной) обмотках:
и аргументу (углу β поворота ротора ВТ-П). Информация на статорные обмотки ВТ-П поступает от ВТ-Д, который в режиме СКВТ-координатора вырабатывает две составляющие вектора информации в виде напряжений в роторных (синусной и косинусной) обмотках:
 (3.20)
(3.20)
где  - напряжение, подаваемое на обмотку возбуждения датчика;
- напряжение, подаваемое на обмотку возбуждения датчика;  – коэффициент трансформации ВТ-Д,
– коэффициент трансформации ВТ-Д,  - угол поворота ротора датчика.
- угол поворота ротора датчика.
Напряжение  подается на квадратурную обмотку
подается на квадратурную обмотку  , a
, a  - на обмотку возбуждения ВТ-приемника.
- на обмотку возбуждения ВТ-приемника.
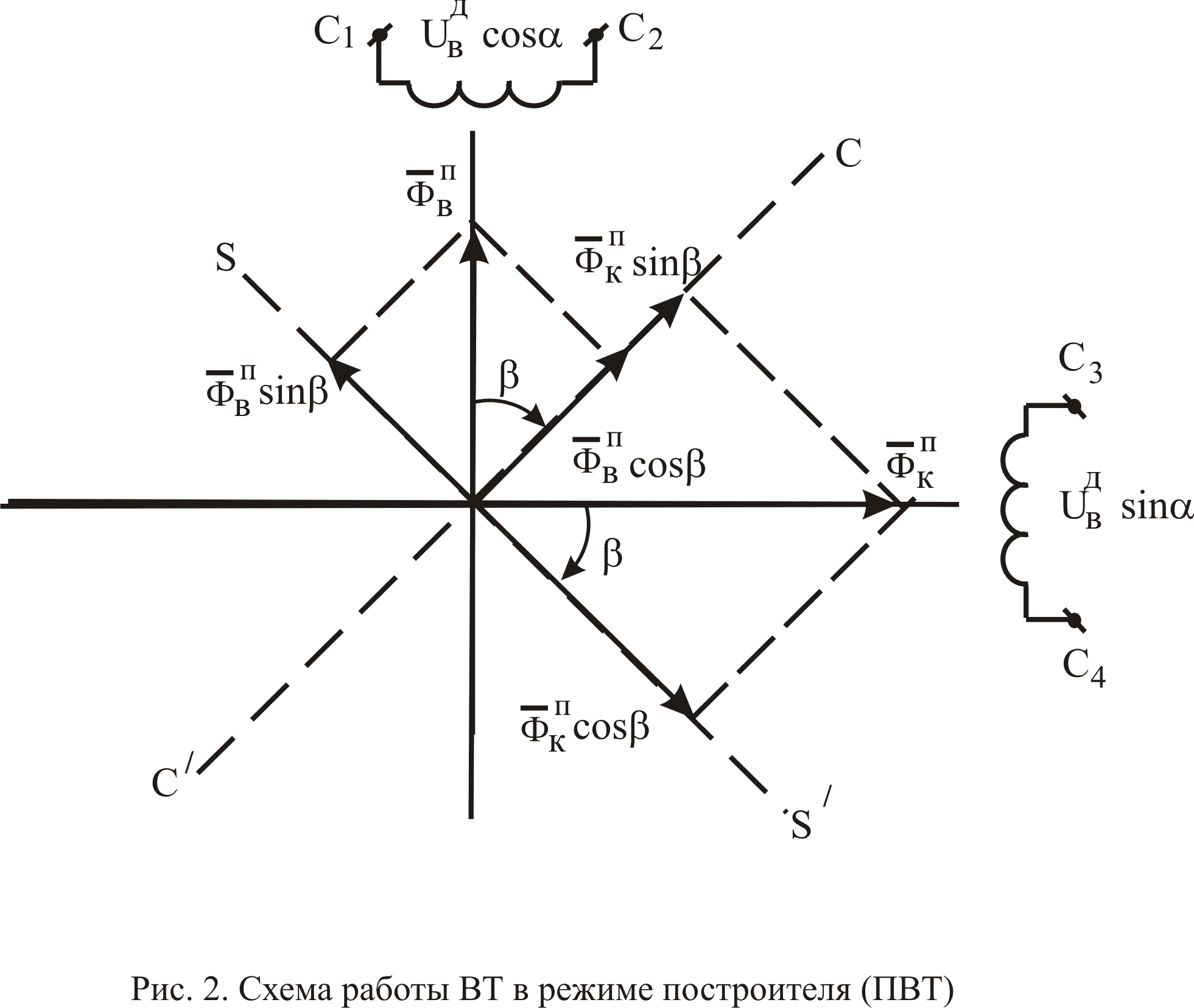
Рис. 3.16. Схема работы СКВТ в режиме построителя (ПВТ)
Протекающие в обмотках токи создают два магнитных потока, показанных на рис. 3.16 в виде векторов  - магнитный поток обмотки возбуждения и
- магнитный поток обмотки возбуждения и  - магнитный поток квадратурной обмотки.
- магнитный поток квадратурной обмотки.
Если ротор ВТ-приемника развернут на угол  , то по направлениям магнитных осей синусной
, то по направлениям магнитных осей синусной  и косинусной
и косинусной  обмоток будут действовать результирующие магнитные потоки (проекции
обмоток будут действовать результирующие магнитные потоки (проекции  и
и  ).
).
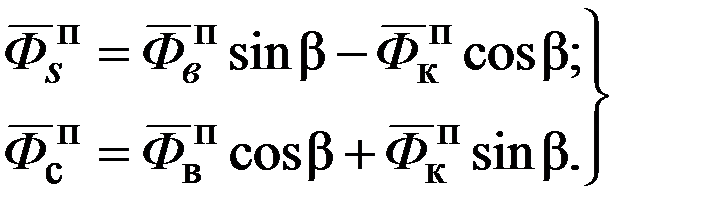 (3.21)
(3.21)
Поскольку закон изменения  и
и  соответствует закону изменения напряжений на входных клеммах обмоток (возбуждения и квадратурной) ВТ-П, т.е. соответствует закону изменения напряжения соответственно на косинусной и синусной обмотках ВТ-Д, то напряжения на роторных обмотках ВТ-приемника определяются выражениями вида
соответствует закону изменения напряжений на входных клеммах обмоток (возбуждения и квадратурной) ВТ-П, т.е. соответствует закону изменения напряжения соответственно на косинусной и синусной обмотках ВТ-Д, то напряжения на роторных обмотках ВТ-приемника определяются выражениями вида
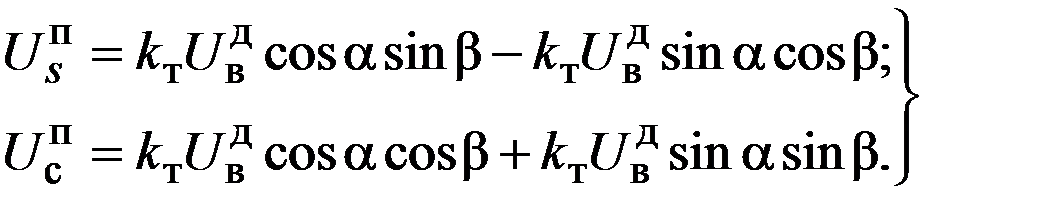 (3.22)
(3.22)
где  - коэффициент пропорциональности.
- коэффициент пропорциональности.
Применяя теорему сложения тригонометрических функций, получим:
 (3.23)
(3.23)
Анализ формул показывает, что при равенстве поворотов роторов датчика и приемника  напряжение в синусной обмотке приемника станет нулевым только при условии
напряжение в синусной обмотке приемника станет нулевым только при условии  , т. е. при условии, что α = β. Следовательно,
, т. е. при условии, что α = β. Следовательно,
 (3.24)
(3.24)
и является условием синхронизации ВТ-П и ВТ-Д по углу поворота их роторов.
Точность одноотсчетных ССС, построенных на ВТ, значительно выше ССС, построенных на сельсинах. Однако в современных морских системах навигации в ряде случаев указанной точности оказывается недостаточно. Тогда проблему повышения точности передачи информации решают использованием двухканальных ССС (ДССС), работающих по методу точного и грубого отсчета. Такие двухканальные ССС обычно называют двухотсчетными ССС. Заметим, что ДССС строятся на той же элементной базе, что используется в одноотсчетных ССС (ВТ, усилитель, АДП).
При этом ДССС должны обеспечивать достижение следующих результатов:
- существенное повышение точности передачи угла;
- самосинхронизацию в пределах 0 - 360о.
Дата: 2018-12-21, просмотров: 615.